Предлагаемое устройство относится к области тренажеростроения и может быть использовано для подготовки операторов корабельных пассивных радиолокационных систем (ПРЛС) методам и приемам их управления в различных оперативно-тактических ситуациях.
Рассматриваемое устройство представляет собой тренажер для подготовки операторов пассивных РЛС, в состав аппаратуры которого входит вычислитель, реализуемый на базе ЭВМ или микропроцессорного комплекта. Все это дает возможность искусственно реализовать физическую или функциональную модель корабельной ПРЛС и ее взаимодействие с внешней средой. Позволяя максимально приблизить условия обучения к условиям профессиональной работы операторов, тренажер для подготовки операторов корабельных ПРЛС в наибольшей степени обеспечивает выполнение психолого-педагогических требований к процессу личного состава ВМФ.
Одним из важных вопросов, который необходимо решать разработчикам тренажеров, является возможность реализации в тренажере функциональной модели внешних условий, характерных для работы корабельных ПРЛС, и обучения профессиональному мастерству операторов. Так, одной из самых важных боевых задач, стоящих перед операторами корабельных ПРЛС, является обнаружение излучающих РЛС вероятного противника при дальнем тропосферном распространении радиоволн (ДТР) на максимальных дальностях, в несколько раз превышающих дальность до радиогоризонта.
Таким образом, в тренажере для подготовки операторов корабельных ПРЛС необходимо моделировать процессы поиска, приема и измерения основных радиотехнических параметров излучения РЛС вероятного противника, расположенных на дальностях 300-350 км. Помимо этого с помощью тренажера необходимо научить операторов корабельных ПРЛС методам и приемам управления системами при решении задач поиска, приема и измерения основных радиотехнических параметров излучений РЛС при ДТР на максимальных дальностях их расположения от приемного пункта.
Поэтому в настоящее время в народном хозяйстве большое распространение получили тренажеры для подготовки операторов корабельных ПРЛС, где в той или иной мере решаются рассмотренные выше вопросы. К числу таких тренажеров принадлежит и предлагаемый тренажер для подготовки операторов корабельных пассивных радиолокационных систем.
Известен тренажер РЛС для обучения операторов наведению и ручному сопровождению целей (авт. св. №525999, МКИ G09B 9/00, G01S 7/02 - бюллетень №31 от 25.08.1976 г.).
Тренажер включает в себя индикатор наведения, блок формирования угловой развертки, блок формирования развертки дальности, блок формирования вертикальной метки, блок формирования горизонтальной метки, блок имитации антенной системы, соединенный со штурвалом углового перемещения антенны, блок формирования импульсов начала сектора сканирования, блок формирования импульсов конца сектора сканирования, блоки измерения координат левой и правой границ сектора сканирования соответственно, блок формирования импульсов биссектрисы сектора сканирования, триггер управления, конъюнктор отсчета угловых координат, блок отсчета угловых координат внутри сектора сканирования, триггер дальности, генератор импульсов-меток дальности, конъюнктор дальности, блок отсчета координаты дальности, блок определения положения горизонтальной метки, блок преобразования углового перемещения штурвала в код, штурвал ручного сопровождения, блок согласования, ЭВМ, блок переключения кодов, блок ручного сопровождения.
Перед началом работы в оперативную память ЭВМ вводится программа расчета траекторий движения целей и помех. Задача операторов РЛС наведения и ручного сопровождения целей заключается в том, чтобы по данным целеуказания, т.е. координатам цели, повести антенную систему так, чтобы биссектриса сектора сопровождения сканирования пересекала цель. Воздушную обстановку оператор наблюдает по индикатору наведения с растровой разверткой, подобной телевизионной. Растр создается за счет сканирования луча диаграммы направленности (ДН) антенны.
Оператор совмещает отметку следящей системы дальности (горизонтальную метку) с целью (в результате цель оказывается в перекрестии биссектрисы сектора сканирования и горизонтальной метки дальности) и переводит системы управления антенной и следящую систему дальности в режим ручного сопровождения, стремясь удержать цель в перекрестии биссектрисы сектора сканирования и горизонтальной метки дальности.
Тренажер РЛС для обучения операторов наведению и ручному сопровождению целей (ав. св. №525999) обеспечивает:
- отображение на экране индикатора с растровой разверткой отметки цели;
- отображение на экране индикатора горизонтальной и вертикальной меток следящей системы;
- ручное сопровождение обнаруженной цели с помощью следящей системы;
- измерение точностных и временных характеристик операторской деятельности;
- выдачу результатов на устройство печати.
К недостаткам тренажера РЛС для обучения операторов наведению и ручному сопровождению целей (авт. св. №525999) следует отнести:
- невозможность обучения операторов практическим навыкам обнаружения и сопровождения источников излучения на максимальных дальностях, в несколько раз превышающих дальность до радиогоризонта;
- невозможность обучения операторов практическим навыкам обнаружения и сопровождения источников излучения с перестраиваемой несущей частотой от импульса к импульсу;
- невозможность обучения операторов практическим навыкам боевого использования РЛС в условиях ДТР радиоволн.
Известен тренажер для обучения операторов корабельных пассивных радиолокационных системы (ЯВ1.079.003 Т0), обеспечивающий:
- отображение на экране индикаторов имитируемых радиолокационных и радиотехнических обстановок;
- отображение на экране индикатора с горизонтальной разверткой вторичных сигналов в виде соответствующих импульсов;
- возможность обучения операторов практическим навыкам обнаружения источников излучения с детерминированной несущей частот в условиях ДТР радиоволн;
- измерение точностных и временных характеристик операторской деятельности;
- выдачу результатов на АЦПУ.
Тренажер для обучения операторов корабельных пассивных радиолокационных систем (ЯВ1.079.003Т0) содержит ЭВМ, буферное запоминающее устройство, оперативное запоминающее устройство, устройство знаковой индикации, устройство управления, устройство формирования первого и второго маркеров, первый и второй преобразователи напряжения в код, первую, вторую и третью схемы сравнения, первую и вторую логические схемы "ИЛИ", имитатор текущего положения антенны, содержащий четвертую схему сравнения и третью логическую схему "ИЛИ", триггер, первую логическую схему "И", двоичный счетчик, а также имитатор радиолокационных сигналов, устройство индикации видеоимпульсов и анализа, вторую логическую схему "И".
Перед началом процесса обучения операторов на тренажере в оперативную память ЭВМ с помощью устройства ввода и регистрации вводится программа расчета траекторий движения целей. При этом траектории движения целей задаются на плоскости в прямоугольной системе координат с центром, вынесенным из точки стояния корабельной ПРЛС на максимальную дальность действия системы как по координате X, так и по координате Y.
Имитация работы существующих супергетеродинных приемных устройств ПРЛС в заданных условных частотных диапазонах I и II осуществляется генераторами линейно изменяющихся напряжений, входящими в состав аппаратуры устройства управления. В устройстве управления формируются импульсы запуска горизонтальных разверток I и II устройства индикации видеоимпульсов. Пилообразные напряжения I и II, снимаемые с генераторов через усилители пилообразного тока I и II поступают в отклоняющие катушки, и световые пятна отклоняются на всю длину экрана ЭЛТ.
Имитируемые радиолокационные сигналы излучения в виде видеоимпульсов, поступая в устройство индикации, образуют информационную модель радиотехнической обстановки. В процессе обучения оператор корабельной ПРЛС может осуществить полуавтоматический съем данных информационной модели. Полуавтоматический съем реализуется с помощью устройства управления, устройства формирования маркера I и устройства формирования маркера II.
Как уже отмечалось, имитация радиолокационных сигналов излучения в тренажере происходит на видеочастоте. При этом учитываются ряд радиотехнических параметров сигналов и изменение этих параметров (амплитуды, количества импульсов и др.) на экране ЭЛТ устройства индикации видеоимпульсов в зависимости от дальности трассы источник излучения - ПРЛС, условий распространения сигналов по трассе, амплитудно-частотной характеристики приемного устройства, диаграммы направленности (ДН) пеленгационной антенны.
В условиях функционирования ПРЛС большое воздействие на уровень входной мощности принимаемых сигналов оказывает тропосфера. Влияние тропосферы на уровень входной мощности сигналов обычно характеризуется функцией ослабления, которая определяется средним значением и флюктуациями. Изменения среднего уровня сигналов обусловлены такими метеорологическими причинами, как изменение интенсивности атмосферных флюктуации, прохождение атмосферных фронтов, изменение температурного режима тропосферы и др. Значение среднего уровня и среднеквадратического отклонения медленных флюктуации в тренажере выбираются по данным статистической обработки большого количества экспериментальных реализации автокорреляционной функции и записываются в постоянное запоминающее устройство, входящее в состав имитатора ДТР.
В состав тренажера входит также устройство знаковой индикации, состоящее из дешифратора знака, усилителя подсвета, ЭЛТ, формирователя огибающей, усилителя постоянного тока, распределителя, и формирователя адреса. На экране ЭЛТ устройства заданной знаковой индикации в буквенно-цифровом виде индицируются формуляры (совокупность некоторых основных радиотехнических параметров плюс текущее значение пеленга) обнаруженных источников излучения. Анализируя формуляры обнаруженных целей, оператор корабельной ПРЛС осуществляет вручную набор на устройстве управления соответствующего признака - номера цели и производит выдачу формуляра данных в систему управления оружием.
Для имитации вращения пеленгационной антенны в заданном секторе в тренажере используется имитатор текущего положения антенны, состоящий из вращающегося трансформатора, датчика текущего азимута, двух дисков с прорезями, трех фотоэлементов, двигателя, коммутирующего устройства, двух триггеров, двух схем "И", двух двоичных счетчиков, двух схем "ИЛИ", двух сумматоров и двух блоков констант.
Обучение операторов на тренажере (ЯВ1.079.003Т0) предполагает такие этапы: восприятие, принятие решения и исполнение принятого решения.
Этап восприятия начинается с информационного поиска, в результате которого оператор обнаруживает источники излучения в заданном пространственном секторе. Следующий этап связан с анализом и переработкой полученной информации для принятия решения. После принятия решения наступает заключительный этап - исполнительные действия оператора.
Недостатки тренажера для подготовки операторов корабельных пассивных радиолокационных систем (ЯВ1.079.003Т0) заключается в следующем:
- невозможность обучения операторов корабельных ПРЛС практическим навыкам обнаружения и сопровождения РЛС с перестраиваемой несущей частотой от импульса к импульсу;
- невозможность учета случайного характера поля в апертуре пеленгационной антенны в условиях ДТР радиоволн, приводящая к потерям усиления антенны;
- невозможность обучения операторов практическим навыкам обнаружения и сопровождения источников излучения на максимальных дальностях, в несколько раз превышающих дальность до радиогоризонта.
В тренажере реализована модель движения источников излучения, которая представляет собой совокупность участков с прямолинейным движением и участков маневра - это полиноминальная модель движения. (См. А.Н. Романов. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М: Воениздат, 1980, стр. 34-38).
После включения тренажера обучаемым оператором с помощью формирователя тактовых импульсов и формирователя импульсов запуска осуществляется имитация работы супергетеродинных приемных устройств ПРЛС в I и II условных частотных диапазонах, а также имитируются горизонтальные развертки на экране двухлучевой ЭЛТ. Все вычислительные устройства входят в состав пульта оператора пассивной РЛС.
Радиолокационные сигналы излучений, имитируемые в тренажере блоком имитации видеоимпульсов, в аналоговой форме поступают на соответствующие электроды ЭЛТ, где они воспроизводятся в виде отметок. Здесь же, на экране ЭЛТ индицируются прямоугольные импульсы-маркеры, которые формируются в блоке индикаторных устройств.
Таким образом, индицируемые на экране ЭЛТ блока индикаторных устройств радиолокационные сигналы излучений на видеочастоте и вторичные сигналы в виде прямоугольных импульсов заданной длительности образуют информационную модель радиотехнической обстановки в зоне действия аппаратуры корабельной ПРЛС.
В процессе работы тренажера обучаемый оператор может осуществить полуавтоматический съем данных информационной модели радиолокационной обстановки. Для этого обучаемый оператор совмещает импульсы-маркеры с отметками цели в виде видеоимпульсов. Изменение положения светящихся маркеров на экране ЭЛТ осуществляется с помощью пульта оператора пассивной РЛС и блока индикаторных устройств.
Обучаемый оператор с помощью пульта оператора пассивной РЛС и блока фиксации несущей частоты сигналов излучения осуществляет обнаружение источников излучения с детерминированной несущей частотой. При этом оценивается время, затраченное оператором в процессе обнаружения источников излучения. Результат оценки выдается на печать в буквенно-цифровом виде.
В состав тренажера для обучения операторов корабельных ПРЛС входит устройство знаковой индикации, состоящее из дешифратора знака, усилителя подсвета, ЭЛТ, формирователя огибающей, усилителя постоянного тока, распределителя, формирователя адреса. На экране ЭЛТ устройства знаковой индикации в буквенно-цифровом виде отображаются формуляры обнаруженных источников излучения. С этой целью в буферное запоминающее устройство с первого выхода вычислителя при выполнении подпрограммы формирования радиотехнической обстановки, поступают формуляры РЛС, сигналы которых не попадают в пределы зоны затенения от палубных надстроек корабля и введенные в вычислитель для организации процесса формирования информационной модели радиотехнической обстановки. Буферное запоминающее устройство функционирует совместно с оперативным запоминающим устройством, формуляры целей в которое переписываются при наличии двоичного кода Птек.ант. - углового положения пеленгационной антенны. Необходимым условием наличия кода Птек.ант. является одновременное поступление на первый и второй входы логической схемы "И" сигналов с выходов блока имитации текущего положения антенны и блока имитации приемного устройства. Данное условие эквивалентно приему сигналов излучения главным лепестком ДН пеленгационной антенны при компенсации сигналов излучения, принятых по боковым лепесткам ДН при работе супергетеродинных приемных устройств ПРЛС.
Для имитации обнаруженных радиолокационных сигналов в тренажере используется блок имитации видеосигналов. Так как при работе ПРЛС, реализующей амплитудный метод пеленгования, информация об объекте наблюдения поступает в виде переговорной последовательности видеоимпульсов, флюктуирующих по амплитуде, то формируемые видеосигналы представляют собой последовательность прямоугольных импульсов, амплитуда которых флюктуирует. При этом средний уровень мощности полученного сигнала изменяется обратно пропорционально второй степени дальности в соответствии с основным уравнением радиолокации.
Итак, блок имитации видеосигналов осуществляет имитацию радиолокационных сигналов на видеочастоте с учетом дальности, условий распространения сигналов, амплитудно-частотной характеристики приемных устройств при работе их в I и II условиях диапазонах частот.
В условиях функционирования ПРЛС большое действие на уровень мощности принимаемых сигналов оказывает тропосфера. Случайный характер поля в апертуре пеленгационной антенны приводит к снижению интенсивности поля в фокусе, т.е. к снижению коэффициента направленного действия антенны 

При имитации обнаружения РЛС с детерминированной несущей частотой сигналов излучения работают супергетеродинные приемные устройства и блок имитации приемного устройства, входящий в состав аппаратуры тренажера, осуществляет имитацию работы устройства компенсации сигналов излучения, принятых боевыми лепестками ДН пеленгационной антенны.
При имитации обнаружения источников излучения с перестраиваемой несущей частотой от импульса к импульсу компенсация приема сигналов излучения по боковым лепесткам ДН пеленгационной антенны принципиально не включена, так как в этом случае работает приемник прямого усиления, обладающий возможностью одновременного приема сигналов излучения во всем частотном диапазоне и с любых направлений.
Имитация работы приемника прямого усиления в тренажере осуществляется с помощью имитации приемного устройства следующим образом. Из буферного запоминающего устройства в оперативное запоминающее устройство происходит выборка формуляров данных для всех источников излучения заданных диапазонов частот, находящихся в секторе сканирования пеленгационной антенны ПРЛС. Одновременно с этим исключается возможность полуавтоматического съема информации с помощью импульсов-маркеров с устройства индикации видеоимпульсов, так как при работе РЛС с перестраиваемой несущей частотой от импульса к импульсу появление видеосигналов на экране ЭЛТ устройства индикации видеоимпульсов носит случайный характер. Корреляция их по времени отсутствует, они появляются хаотически в различных местах экрана, в то время как видеоимпульсы от РЛС с детерминированной несущей частотой располагаются с некоторым разбросом из-за ошибок измерений в определенном месте экрана и вполне компактной группой.
Оператор ПРЛС, наблюдая визуально за экраном ЭЛТ устройства индикации видеоимпульсов в случае обнаружения РЛС с перестраиваемой несущей частотой от импульса к импульсу, не может осуществить выделение компактного пакета видеоимпульсов. Он вынужден включить приемник прямого усиления. Одновременно с включением приемника прямого усиления обучаемый оператор с помощью блока имитации текущего положения пеленгационной антенны осуществляет пространственную ориентацию антенны в направлении предполагаемого местоположения РЛС с перестраиваемой несущей частотой от импульса к импульсу. В качестве критерия правильного пространственного ориентирования антенны выбрано условие индикации хаотически появляющихся видеоимпульсов с максимальной амплитудой. Когда координата (пеленг) РЛС с перестраиваемой несущей частотой от импульса к импульсу, хранимая в памяти вычислителя, окажется внутри строба Птек.ант±θ0/2, где θ0 - ширина главного лепестка ДН пеленгационной антенны по уровню половинной мощности, вычислитель переходит на подпрограмму перезаписи признака (П) в формуляр данных, характеризующий данный источник излучения.
Формуляр данных с признаком П отображается на экране ЭЛТ устройства знаковой индикации, входящего в состав блока индикаторных устройств. Появление в составе формуляра данных признака II свидетельствует об обнаружении ПРЛС источника излучения о перестраиваемой несущей частотой.
Имитация изменения несущей частоты от импульса к импульсу реализуется в тренажере блоком имитации изменения несущей частоты, входящим в состав блока имитации видеосигналов. В блоке имитации изменения несущей частоты хранятся в определенной последовательности величины изменения несущей частоты сигналов (±Δf). Последовательность величин (±Δf) задается априори перед началом процесса обучения оператора при обнаружении частоты сигналов излучения по заданному закону.
Установление факта обнаружения РЛС с перестраиваемой несущей частотой осуществляется в результате совместного наблюдения за видеосигналами, появляющимися на экране ЭЛТ устройства индикации видеоимпульсов, и формуляром данных с признаком П на экране ЭЛТ устройства знаковой индикации. С этой целью производится операция описания РЛС, которая выполняется набором на пульте оператора ПРЛС кода номера цели - признака цели, формуляр данных которой имеет признак П.
При наличии кода номера цели вычислитель переходит на подпрограмму оценки быстроты действий оператора корабельной ПРЛС при обнаружении РЛС с перестраиваемой несущей частотой от импульса к импульсу при ДТР радиоволн.
Итак, при обучении личного состава ВМФ на тренажере для обучения операторов корабельных ПРЛС можно повысить степень выучки операторов практическим навыкам управления ПРЛС в процессе обнаружения РЛС как с детерминированной, так и перестраиваемой несущей частотой, а также добиться максимального подобия имитированных сигналов в условиях ДТР радиоволн.
Целью предлагаемого изобретения является повышение уровня обученности операторов обнаружению излучающих РЛС на максимальных дальностях при дальнем тропосферном распространении радиоволн путем оптимизации параметров пространственного поиска пеленгационной антенны.
Поставленная цель достигается тем, что в тренажер для обучения операторов корабельных пассивных радиолокационных систем, включающей последовательно соединенные пульт оператора пассивной РЛС, блок имитации положения антенны, вычислитель, буферное запоминающее устройство, оперативное запоминающее устройство, блок индикаторных устройств, блок фиксации несущей частоты сигналов излучения, блок имитации дальнего тропосферного распространения сигналов, блок имитации видеосигналов и блок фиксации времени обнаружения целей, а также блок имитации приемного устройства и логический элемент "И", при этом второй, третий, четвертый, пятый, шестой, седьмой и восьмой выходы пульта оператора пассивной РЛС подключены соответственно к второму, третьему, четвертому, пятому, шестому, седьмому и восьмому входам блока индикаторных устройств, девятый, десятый и одиннадцатый выходы пульта оператора пассивной РЛС подключены соответственно к второму, третьему и четвертому входам блока имитации видеосигналов, двенадцатый, тринадцатый и четырнадцатый выходы пульта оператора пассивной РЛС подключены соответственно к второму, третьему и четвертому входам блока фиксации несущей частоты сигналов излучения, пятнадцатый выход пульта оператора пассивной РЛС подключен и второму входу блока фиксации времени обнаружения целей, выход блока имитации текущего положения антенны подключен также к второму входу логического элемента "И", первому входу блока имитации приемного устройства и пятому входу блока имитации видеосигналов, третий, четвертый и пятый входы вычислителя подключены соответственно к третьему выходу блока фиксации несущей частоты сигналов излучения, первому выходу блока фиксации времени обнаружения целей и второму выходу блока имитации приемного устройства, второй, третий, четвертый и пятый выходы вычислителя подключены соответственно к пятому входу блока фиксации несущей частоты сигналов излучения, второму входу блока имитации дальнего тропосферного распространения сигналов, второму входу блока имитации приемного устройства и третьему входу блока фиксации времени обнаружения целей, девятый и десятый выходы блока индикаторных устройств подключены соответственно к второму и третьему выходам блока имитации видеосигналов, четвертый и пятый выходы блока фиксации несущей частоты сигналов излучения подключены соответственно к третьим входам блока имитации приемного устройства и блока имитации дальнего тропосферного распространения сигналов, а второй и третий выходы блока фиксации несущей частоты сигналов излучения также подключены к четвертому и пятому входам блока имитации приемного устройства, второй, третий, четвертый и пятый выходы блока имитации дальнего тропосферного распространения сигналов подключены соответственно к шестому, седьмому, восьмому и девятому входам блока имитации видеосигналов, десятый вход и четвертый выход которого подключен соответственно к четвертому выходу вычислителя и четвертому входу блока фиксации времени обнаружения целей, введены блок имитации параметров адаптивного обзора и последовательно соединенные логический элемент "НЕ", второй логический элемент "И" и логический элемент "ИЛИ", при этом первый, второй выходы и первый, второй, третий, четвертый, пятый входы блока имитации параметров адаптивного обзора подключены соответственно к второму входу логического элемента "ИЛИ", второму входу блока имитации текущего положения антенны, выходу блока имитации текущего положения антенны, пятнадцатому, шестнадцатому и семнадцатому выходам пульта оператора пассивной РЛС, выходу буферного запоминающего устройства, вход логического элемента "НЕ" подключен к семнадцатому выходу пульта оператора пассивной РЛС, второй вход второго логического элемента "И" подключен к выходу буферного запоминающего устройства, а выход логического элемента "ИЛИ" подключен к входу оперативного запоминающего устройства.
Авторам не известны тренажеры, обладающие свойствами, совпадающими со свойствами предлагаемого тренажера. Поэтому предлагаемый тренажер для обучения операторов корабельных пассивных РЛС по сравнению с известными тренажерами такого назначения обладает существенными отличиями.
Рассмотренное построение тренажера позволяет создать динамические и информационные модели, с помощью которых возможно осуществить имитацию излучения РЛС вероятного противника, расположенных на максимальных дальностях от корабельной ПРЛС, превышающих дальность до радиогоризонта в несколько десятков раз в условиях ДТР радиоволн.
Таким образом, вновь введенные устройства и связи в совокупности с устройствами и связями противника дают возможность создать на индикаторных устройствах тренажера отображение сложного радиотехнического поля, сформированного излучением РЛС вероятного противника, расположенных на максимальных дальностях от кораблей ПРЛС в несколько десятков раз превышающих дальность до радиогоризонта и с учетом условий ДТР радиоволн.
Тем самым обучаемый оператор корабельной ПРЛС получает возможность приобрести в процессе обучения навыки и приемы управления РЛС вероятного противника, характеризующихся малым энергетически потенциалом. При этом повышается качество профессиональной подготовки операторов корабельных ПРЛС, что приводит к повышению боеготовности ВМФ.
Рассмотрим техническую реализацию тренажера для обучения операторов корабельных пассивных радиолокационных систем, характеристику отдельных устройств, блоков и элементов.
На чертеже фиг. 1 представлена блок-схема тренажера для обучения операторов корабельных пассивных радиолокационных систем.
На чертеже фиг. 2 представлена блок-схема пульта оператора пассивной РЛС (1).
На чертеже фиг. 3 представлена блок-схема блока имитации текущего положения антенны (2).
На чертеже фиг. 4 представлена блок-схема вычислителя (3).
На чертеже фиг. 5 представлена блок-схема блока индикаторных устройств (6).
На чертеже фиг. 6 представлена блок-схема блока фиксации несущей частоты сигналов излучения (7).
На чертеже фиг. 7 представлена блок-схема блока имитации дальнего тропосферного распространении сигналов (8).
На чертеже фиг. 8 представлена блок-схема блока имитации видеосигналов (9).
На чертеже фиг. 9 представлена блок-схема блока фиксации времени обнаружения целей (10).
На чертеже фиг. 10 представлена блок-схема блока имитации приемного устройства (11).
На чертеже фиг. 11 представлена блок-схема блока имитации параметров адаптивного обзора (13).
Предлагаемый тренажер для обучения операторов пассивных радиолокационных систем (фиг. 1) состоит из последовательно соединенных пульта оператора пассивной РЛС (1), блока имитации текущего положения антенны (2), вычислителя (3) и буферного запоминающего устройства (4), оперативного запоминающего устройства (4), оперативного запоминающего устройства (5), блока индикаторных устройств (6), блока фиксации несущей частоты сигналов излучения (7), блока имитации дальнего тропосферного распространения сигналов (8), блока имитации видеосигналов (9) и блока фиксации времени обнаружения целей (10), а также блока имитации приемного устройства (11), первого логического элемента "И" (12), блока имитации параметров адаптивного обзора (13) и последовательно соединенных логического элемента "НЕ" (14), второго логического элемента "И" (15) и логического элемента "ИЛИ" (16), при этом второй, третий, четвертый, пятый, шестой, седьмой и восьмой выходы пульта оператора пассивной РЛС (1) подключены соответственно к второму, третьему, четвертому, пятому, шестому, седьмому и восьмому входам блока индикаторных устройств (6), девятый, десятый и одиннадцатый выходы пульта оператора пассивной РЛС (1) подключены соответственно к второму, третьему и четвертому входам блока имитации видеосигналов (9), двенадцатый, тринадцатый и четырнадцатый выходы пульта оператора пассивной РЛС (1) подключены соответственно к второму, третьему и четвертому входам фиксации несущей частоты сигналов излучения (7), пятнадцатый выход пульта оператора пассивной РЛС (1) подключен к второму входу первого логического элемента "И" (12), первому входу блока имитации приемного устройства (11) и пятому входу блока имитации видеосигналов (9), второй, третий, четвертый и пятый входы вычислителя (3) подключены соответственно к второму и третьему выходам блока фиксации несущей частоты сигналов излучения (7), первому выходу блока фиксации времени обнаружения целей (10) и второму выходу блока имитации приемного устройства (11), второй, третий, четвертый и пятый выходы вычислителя (3) подключены соответственно к пятому входу блока фиксации несущей частоты сигналов излучения (7), второму входу блока имитации дальнего тропосферного распространения сигналов (8), второму входу блока имитации приемного устройства (11) и третьему входу блока фиксации времени обнаружения целей (10), девятый и десятый входы блока индикаторных устройств (6) подключены соответственно к второму и третьему выходам блока имитации видеосигналов (9), второй и третий выходы блока фиксации несущей частоты сигналов излучения (7) подключены соответственно к четвертому и пятому входам блока имитации приемного устройства (11), а четвертый и пятый выходы блока фиксации несущей частоты сигналов излучения (7) подключены соответственно к третьим входам блока имитации приемного устройства (11) и блока имитации дальнего тропосферного распространения сигналов (8), второй, третий, четвертый и пятый выходы которого подключены соответственно к шестому, седьмому, восьмому и девятому входам блока имитации видеосигналов (9), девятый вход и четвертый выход которого подключены соответственно к четвертому выходу вычислителя (3) и четвертому входу блока фиксации времени обнаружения целей (10), первый, второй, третий, четвертый и пятый входы блока имитации параметров адаптивного обзора (13) подключены соответственно к второму входу логического элемента ″ИЛИ″ (16), второму входу и выходу блока имитации текущего положения антенны (2), пятнадцатому, шестнадцатому и семнадцатому выходам пульта оператора пассивной РЛС (1), выходу буферного запоминающего устройства (4), вход логического элемента "НЕ" (14) подключен к семнадцатому выходу пульта оператора пассивной РЛС (1), второй вход второго логического элемента "И" (15) подключен к выходу буферного запоминающего устройства (4), а выход логического элемента "ИЛИ" (16) подключен к входу оперативного запоминающего устройства (5).
Перечисленные блоки и схемы, входящие в состав аппаратуры тренажера для обучения операторов корабельных пассивных радиолокационных систем (блок-схема тренажера приведена на фиг. 1), реализуются следующим образом.
1. Пульт оператора пассивной РЛС (1) предназначен для ручного управления пассивной РЛС обучаемым оператором в процессе тренировок на тренажере. Он обеспечивает координацию работы всех блоков и схем тренажера при помощи вырабатываемых им синхронизирующих и управляющих сигналов.
Блок-схема пульта оператора пассивной РЛС (I) приведена на фиг. 2.
Пульт оператора пассивной РЛС (1) состоит из схемы установки сектора сканирования (17), формирователя тактовых импульсов (18), формирователя импульсов запуска 1 и 2 (19), генератора пилообразного напряжения 2 (21), формирователя управляющего напряжения 1 (22), формирователя кодовой последовательности (23), формирователя управляющего напряжения 2 (24) и формирователя признаков (25).
Схема установки сектора сканирования (17) состоит из штурвала, соединенного механически с вращающимся трансформатором. Выход вращающегося трансформатора подключен к первому входу блока имитации текущего положения антенны (2).
Формирователь тактовых импульсов (18) состоит из последовательно соединенных кварцевого генератора, двоичного счетчика и дешифратора. Первый, второй, третий и четвертый выходы дешифратора подключены соответственно к единичному и нулевому входам триггера 1 и триггера 2, входящих в состав формирователя импульсов запуска 1 и 2 (19). Пятый выход дешифратора, который входит в состав формирователя тактовых импульсов (18), подключен соответственно к восьмому входу блока индикаторных устройств (6), второму входу блока фиксации времени обнаружения целей (10) и второму входу блока имитации параметров адаптивного обзора (13). Выходи триггеров 1 и 2 подключены соответственно к входам генератора пилообразного напряжения 1 (20) и генератора пилообразного напряжения 2 (21). Выход генератора пилообразного напряжения 1 (20) подключен соответственно к вторым входам блока индикаторных устройств (6) и блока имитации видеосигналов (9), а выход генератора пилообразного напряжения 2 (21) подключен соответственно к четвертому входу блока индикаторных устройств (6) и третьему входу блока имитации видеосигналов (9). Выходы триггеров 1 и 2, входящих в формирователь импульсов запуска 1 и 2 (19), подключены также к шестому и седьмому входам блока индикаторных устройств (6).
Генераторы пилообразного напряжения 1 (20) и 2 (21) выполнены на лампе обратной волны (ЛОВ).
Формирователи управляющего напряжения 1 (22) и 2 (24) представляют собой переменные резисторы, выходы которых подключены соответственно к третьему входу блока индикаторных устройств (6), второму входу блока фиксации несущей частоты сигналов излучения (7), пятому входу блока индикаторных устройств (6) и четвертому входу блока фиксации несущей частоты сигналов излучения (7).
Формирователь кодовой последовательности (23) состоит из N электрических цепей, каждая из которых представляет собой последовательно соединенные кнопку, формирователь одиночного импульса, линию задержки, триггер и буферный регистр, при этом вторые входы триггеров подключены также к выходам формирователей одиночного импульса, второй, третий …, N-й входы буферного регистра подключены к выходам триггеров, (N+1)-й вход буферного регистра подключен к пятому выходу дешифратора, который входит в формирователь тактовых импульсов (18). Первый, второй и третий выходы формирователя кодовой последовательности (23) подключены соответственно к третьему входу блока фиксации несущей частоты сигналов излучения (7), третьему входу блока имитации параметров адаптивного обзора (13) и одновременно к четвертому входу блока имитации параметров адаптивного обзора (13) и входу логического элемента "НЕ" (14).
Формирователь признаков (25) состоит из двух электрических цепей, каждая из которых представляет собой последовательно соединенные кнопку, формирователь одиночного импульса, линию задержки, триггер и буферный регистр, при эхом вторые входы триггеров подключены также к выходам формирователей одиночного импульса, второй вход буферного регистра подключен к выходу триггера, третий вход буферного регистра подключен также к пятому выходу дешифратора, входящего в формирователь тактовых импульсов (18).
Рассмотренные блоки выполнены на известных элементах аналоговой и дискретной техники. См. 1. Мартынов В.А. и др. Панорамные приемники и анализаторы спектра. Под. ред. Г.Д. Завирина - М.: Изд-во "Сов. радио", 1964, стр. 201-205.
2. Справочник радиолюбителя-конструктора. Под. ред. Р.М. Малинина - М.: Изд-во "Энергия″, 1973, стр. 344-345.
3. Справочник по цифровой вычислительной технике. Под. ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 282-291.
4. М.И. Филькенштейн. Основы радиолокации - М.: Изд-во "Сов. радио", 1973, стр. 383-387.
5. С.В. Самсоненко. Цифровые методы оптимальной обработки радиолокационных сигналов - М.: Изд-во "Воениздат", 1968.
2. Блок имитации текущего положения антенны (2) выполняет преобразование угла поворота пеленгационной антенны в двоичный код, фиксирует границы заданного сектора сканирования антенны, определяет текущий азимут и биссектрису сектора сканирования, а также применяет угловую скорость вращения пеленгационной антенны.
Блок-схема имитации текущего положения антенны (2) приведена на фиг. 3.
Блок имитации текущего положения антенны (2) включает в себя вращающийся трансформатор (26), механически связанный с диском 1 (27), в свою очередь диск 1 (27) механически связан с датчиком текущего азимута (28), диск 2 (29) механически связан со следящей системой (30), которая имеет связи со схемой управления режимом сканирования (31) и схемой управления скоростью (32), выход датчика текущего азимута (28) и первый, второй, третий и четвертый выходы схемы управления режимом сканирования (31) подключены соответственно к первому, второму, третьему, четвертому и пятому входам блока формирования кода положения антенны (33), вращающийся трансформатор (26) подключен к первому выходу пульта оператора пассивной РЛС (I), вход схемы управления скоростью (32) подключен к второму выходу блока имитации параметров адаптивного обзора (13), выход блока формирования кода положения антенны (33) подключен одновременно к первому входу вычислителя (3), пятому входу блока имитации видеосигналов (9), первому входу блока имитации приемного устройства (11), второму входу первого логического элемента "И" (12) и первому входу блока имитации параметров адаптивного обзора (13).
Схема управления режимом сканирования (31) включает в себя последовательно соединенные первый фотоэлемент, первый логический элемент "И" и первый двоичный счетчик; второй фотоэлемент и первый триггер; второй триггер; второй логический элемент "И" и второй двоичный счетчик, а также третий фотоэлемент и коммутирующее устройство, при этом первый и второй выходы первого триггера подключены соответственно к второму входу первого логического элемента "И" и первому входу коммутирующего устройства, выход которого подключен к первому входу следящей системы (30), выход первого логического элемента "И" подключен также к первому входу блока формирования кода положения антенны (33), выход первого фотоэлемента подключен также к второму входу второго логического элемента "И", выход второго фотоэлемента подключен также к вторым входам второго триггера и второго двоичного счетчика, выход третьего фотоэлемента подключен одновременно к второму входу первого триггера, второму входу первого двоичного счетчика и первому входу второго триггера, выход второго логического элемента "И" подключен к второму входу блока формирования кода положения антенны (33), выход второго двоичного счетчика и второй выход второго триггера подключены соответственно к третьему и четвертому входу блока формирования кода положения антенны (33).
Блок формирования кода положения антенны (33) включает в себя последовательно соединенные логический элемент "ИЛИ" и первый сумматор; первый блок констант, второй логический элемент "ИЛИ" и второй сумматор, а также второй блок констант, при этом второй вход первого сумматора подключен к выходу второго сумматора, второй вход которого является пятым входом блока формирования кода положения антенны (33) и подключен к выходу датчика текущего азимута (28), выход второго блока констант подключен к второму входу второго логического элемента "ИЛИ", входы второго и первого блоков констант являются соответственно первым и вторым входами блока формирования кода положения антенны (33), первый и второй входы первого логического элемента "ИЛИ" являются соответственно третьим и четвертым входами блока формирования кода положения антенны (33), выход блока формирования кода положения антенны (33) подключен одновременно к первому входу вычислителя (3), пятому входу блока имитации видеосигналов (9), первому входу блока имитации приемного устройства (11), второму входу первого логического элемента "И" (12) и первому входу блока имитации параметров адаптивного обзора (13).
Схема управления скоростью (32) включает в себя последовательно соединенные логический элемент "НЕ", первый генератор тактовых импульсов, логический элемент "ИЛИ", двоичный счетчик и преобразователь код-напряжение, а также второй генератор тактовых импульсов, при этом входы логического элемента "НЕ", второго генератора тактовых импульсов и второй вход двоичного счетчика подключены одновременно к второму выходу блока имитации параметров адаптивного обзора (18), выход второго генератора тактовых импульсов подключен к второму входу логического элемента "ИЛИ", выход преобразователя код-напряжение подключен к второму входу следящей системы (30).
Работа блока имитации текущего положения антенны (2) происходит следующим образом. Оператор, управляя вращающимся трансформатором (26), устанавливает диск 1 (27) в соответствующее положение и тем самым задает границы сектора сканирования пеленгационной антенны, так как на диске 1 (27) заданный сектор сканирования (ΔС) отмечен двумя прорезями. По периферии диска 1 (27) также располагаются прорези, число которых соответствует дискретности отсчета азимута. Диск 1 (27) механически подключен к датчику текущего азимута (28), с выхода которого на второй вход второго сумматора, входящего в блок формирования кода положения антенны (33), поступает двоичный код биссектрисы сектора сканирования (Пбис.). Соосно с диском 1 (27) устанавливается диск 2 (29), в котором сделаны специальные прорези для формирования импульсов начала и конца сектора сканирования и счета азимутальных меток. С другой стороны диска 2 (29) размещаются источники света, создающие узкие лучи света, которые в каждый момент времени засвечивают только одну прорезь в диске 2 (29). Диск 2 (29) механически соединен со следящей системой (30), в состав которой входит двигатель. Направление вращения вала коммутируется с помощью изменения фазы питающего напряжения. Коммутация осуществляется коммутирующим устройством, входящим в схему управления режимом сканирования (31). Первый, второй и третий фотоэлементы преобразуют световые импульсы, проникающие через прорези диска 2 (29) при его вращении двигателем в импульсы электрического тока, при этом на единичный вход первого триггера, входящего в схему управления режимом сканирования, поступает импульс начала сектора сканирования, вырабатываемый вторым фотоэлементом в момент прохождения направления начальной границы и устанавливающий первый триггер в единичное состояние. Тем самым открывается первый логический элемент "И" и последовательность импульсов с первого фотоэлемента считывания азимутальных меток поступает в первый двоичный счетчик, выход которого подключен к первому входу первого логического элемента "ИЛИ", и на вход второго блока констант.
Одновременно с этим импульс с выхода второго фотоэлемента поступает на нулевой вход второго триггера, переводя его в нулевое состояние, и на второй управляющий вход второго двоичного счетчика, обнуляя его. Первый триггер своим нулевым выходом управляет коммутирующим устройством. В конце сектора сканирования импульс конца, формируемый третьим фотоэлементом, поступает на нулевой вход первого двоичного счетчика, обнуляя его. Одновременно с этим импульс конца с выхода третьего фотоэлемента поступает на единичный вход второго триггера, который открывает второй логический элемент "И" для прохождения через него на входы второго двоичного счетчика и второго блока констант последовательности импульсов с первого фотоэлемента. Выход второго двоичного счетчика подключен к второму входу первого логического элемента "ИЛИ". Нулевой выход второго триггера аналогично нулевому выходу первого триггера соединен с вторым входом коммутирующего устройства, которое управляет работой двигателя. Во втором сумматоре осуществляются следующие операции:



Таким образом, в блоке имитации текущего положения антенны (2) с помощью вращающегося трансформатора (26), диска 1 (27), датчика текущего азимута (28), диска 2 (29), следящей системы (30), схемы управления режимом сканирования (31) и блока формирования кода положения антенны (33) формируется двоичный код

который в дальнейшем используется при работе тренажера.
Скорость вращения вала двигателя, входящего в состав следящей системы (30), задается схемой управления скоростью (32) следующим образом. На вход логического элемента "НЕ" со второго выхода блока имитации параметров адаптивного обзора (13) поступает или не поступает сигнал управления. Если сигнала управления нет, т.е. не выполняется адаптивный обзор (обзор сектора сканирования с наименьшей угловой скоростью вращения антенны), то с выхода логического элемента "НЕ" проинвертированный логический "0" запускает первый генератор тактовых импульсов, который с определенной частотой генерирует последовательность стандартных импульсов. Данная последовательность импульсов с выхода первого генератора тактовых импульсов через логический элемент "ИЛИ" поступает на вход двоичного счетчика, который выполняет функцию счета за определенный промежуток времени импульсов и формирует двоичный код, который преобразователем код-напряжение преобразуется в напряжение для управления, вращением вала двигателя следящей системы (30) с определенной скоростью. Если сигнал управления есть, то он инвертируется логическим элементом "НЕ" в логический "0" и тем самым прекращает работу первого генератора тактовых импульсов. Одновременно с этим он обнуляет двоичный счетчик и запускает второй генератор тактовых импульсов, частота генерирования которого значительно меньше частоты генерирования первого генератора тактовых импульсов. Последовательность импульсов с выхода второго генератора тактовых импульсов через логический элемент "ИЛИ" попадает в двоичный счетчик, где они подсчитываются и двоичный код счета с выхода данного двоичного счетчика далее поступает в преобразователь код-напряжение. Преобразователь код-напряжение преобразовывает код в напряжение для управления скоростью вращения вала двигателя, которая будет наименьшей по сравнению со скоростью вращения антенны в нормальных условиях, т.е. когда не задается режим адаптивного обзора.
Итак, с помощью схемы управления скоростью (32) в блоке имитации текущего положения антенны (2) осуществляется имитация изменения скорости вращения пеленгационной антенны ПРЛС, которая проявляется в медленном изменении двоичного кода текущего положения антенны.
Назначение отдельных блоков и элементов, входящих в состав блока имитации текущего положения антенны (2), и их построение подробно изложены в специальной технической литературе. См. 1. С.В. Самсоненко. Цифровые методы оптимальной обработки радиолокационных сигналов - М.: Воениздат, 1968, стр. 108-112.
2. А.Н. Романов. Тренажеры для подготовки операторов РЛС с помощью ЭВМ - М.: Воениздат, 1980, стр. 70-74.
3. Вычислитель (3) представляет собой ЭВМ ЕС-1030 и предназначен для преобразования радиолокационной и радиотехнической информации по заданной программе, управления вычислительным процессом и взаимодействия блоков, схем и элементов в процессе решения учебных задач.
Блок-схема вычислителя (3) приведена на фиг. 4.
Вычислитель (3) включает в себя процессор ЕС-2030 (34) с основной оперативной памятью, соединенный с селекторным каналом СК1 (35), СК2 (36), СК3 (37) и мультиплексным каналом МК (38), устройство управления НМД ЕС-5551 (39), НМД ЕС-5056 (40), устройство управления НМЛ ЕС-5517 (41), НМЛ ЕС-5017 (42), интерфейс ввода-вывода (43), устройство УВУ (44), коммутирующее устройство (45), устройство ввода и регистрации (46), состоящее из пишущей машинки с блоком управления ЕС-7070 (47), АЦПУ ЕС-7032 (48), устройство вывода на перфокарты ЕС-7012 (49) и устройства ввода с перфокарт ЕС-6012 (50), при этом СК1 (35) последовательно соединен с устройством управления НМД (39) и НМД (40), СК2 (36) последовательно соединен с устройством управления НМЛ (41), и НМЛ (42), СК3 (37) последовательно соединен с интерфейсом ввода-вывода (43), устройством УВУ (44) и коммутирующим устройством (45), МК (38) одновременно соединен с пишущей машинкой (47), АЦПУ (48), устройством вывода на перфокарты (49) и устройством ввода с перфокарт (50).
Первый, второй, третий, четвертый и пятый входы коммутирующего устройства (45) подключены соответственно к выходу блока имитации текущего положения антенны (2), второму и третьему выходам блока фиксации несущей частоты сигналов излучения (7), выходу блока фиксации времени обнаружения целей (10) и второму выходу блока имитации приемного устройства (11).
Первый, второй, третий, четвертый и пятый выходы коммутирующего устройства (45) подключены соответственно к первому входу буферного запоминающего устройства (4), пятому входу блока фиксации несущей частоты сигналов излучения (7), второму входу блока имитации дальнего тропосферного распространения сигналов (8), одновременно к десятому входу блока имитации видеосигналов (9) и второму входу блока имитации приемного устройства (11), третьему входу блока фиксации времени обнаружения целей (10).
В вычислитель (3) исходные подпрограммы вводятся с помощью устройства ввода и регистрации (46) через МК (38) в процессор (34). С оперативной памяти процессора (34) введенные подпрограммы через СК1 (35) и СК2 (36) перезаписываются на НМД (40) и НМЛ (42). В процессе работы тренажера исходные подпрограммы с НМД (40) и НМЛ (42) в определенной последовательности вводятся в процессор (34) вычислителя (3). Информация, подлежащая регистрации, поступает через МК (38) в устройство ввода регистрации (46).
Оперативная информация, которая используется вычислителем (3) в процессе работы тренажера, поступает от блоков и схем, входящих в состав аппаратуры тренажера, и выдается в данные устройства через СК3 (37), интерфейс ввода-вывода (43), устройство УВУ (44) и коммутирующее устройство (45).
Организация вычислительного процесса и обмена через каналы с аппаратурой тренажера, состав и назначение отдельных устройств вычислителя (3), их аппаратурное построение, требования к построению интерфейса ввода-вывода (43), устройства УВУ (44), коммутирующего устройства (45) достаточно подробно изложены в специальной технической литературе. См. 1. Е.А. Дроздов и др. Электронные вычислительные машины единой системы - М.: Изд-во "Машиностроение", 1976.
2. Б.С. Хусаинов. Программирование ввода-вывода в ОС ЕС ЭВМ на языке Ассемблера. - М.: "Статистика", 1980.
3. ЕС ЭВМ, Интерфейс ввода-вывода. Структура и состав. Требования к функциональным характеристикам. ОСТ Ц50.000.020 НИИ ЦВТ, 1969.
4. В.И. Грубов и др. Устройства электронной вычислительной техники. - К.: Изд-во "Вища школа", 1980.
5. Буферное запоминающее устройство (4) содержит N ячеек памяти и предназначено для хранения машинных слов, определенной длины.
Каждая ячейка памяти состоит из совокупности элементов памяти (триггеров), которые могут находиться в нескольких устойчивых состояниях и предназначены для фиксации (записи) и хранения одной цифры (бита) или разряда числа. Ячейки памяти составляют куб памяти. Кроме того, в состав буферного запоминающего устройства (4) входят регистр адреса, регистр слов, узел коммутации, узел считывания, узел записи и узел управления.
По способу организации обращения к заданной ячейке памяти буферного запоминающего устройства (4) последнее является матричным запоминающим устройством со структурой ЗД. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 282-291.
5. Оперативное запоминающее устройство (5) используется как согласующее устройство. Данное устройство - трансформаторного типа, построенное на П-образных, линейных ферритовых сердечниках. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 322-329.
6. Блок индикаторных устройств (6) предназначен для индикации буквенно-цифровой информации в табличной форме и видеосигналов обнаруженных РЛС в зоне действия аппаратуры корабельной ПРЛС.
Блок-схема блока индикаторных устройств (6) приведена на фиг. 5.
Блок индикаторных устройств (6) включает в себя устройство знаковой индикации (51), устройство индикации видеоимпульсов (52), устройство формирования маркера 1 (53) и устройство формирования маркера 2 (54), при этом первый и второй входы устройства знаковой индикации (51) подключены соответственно к выходу оперативного запоминающего устройства (5) и восьмому выходу пульта оператора пассивной РЛС (1), первый, второй, третий, четвертый, пятый и шестой входы устройства индикации видеоимпульсов (52) подключены соответственно к выходу устройства формирования маркера 1 (53), выходу устройства формирования маркера 2 (54), второму и четвертому выходам пульта оператора пассивной РЛС (1), второму и третьему выходам блока имитации видеоимпульсов (9), первый и второй входы устройства формирования маркера 1 (53) подключены соответственно к третьему и пятому выходам пульта оператора пассивной РЛС (1), первый и второй входы устройства формирования маркера 2 (54) подключены соответственно к шестому и седьмому выходам пульта оператора пассивной РЛС (1), первый вход устройства знаковой индикации (51) является одновременно выходом блока индикаторных устройств (6) который подключен к первому входу блока фиксации несущей частоты сигналов излучения (7).
Устройство знаковой индикации (51) включает в себя дешифратор знака, усилитель подсвета, формирователь огибающей, усилитель постоянного тока, распределитель, формирователь адреса и ЭЛТ.
Организация отображения буквенно-цифровой информации, назначение отдельных устройств знаковой индикации и их аппаратурное построение изложены в специальной технической литературе. См. 1. И.И. Литвак и др. Основы построения аппаратуры отображения в автоматизированных системах. - М.: Изд-во "Сов. радио", 1975, стр. 154-159.
2. Н.Г. Катуков и др. Унифицированное знаковое табло с запоминающим экраном для корабельных радиолокационных комплексов - Вопросы кораблестроения, серия «Радиолокация», выпуск 23, 1976.
Устройство индикации видеоимпульсов (52), включает в себя ЭЛТ, расширитель импульсов 1, генератор пилообразного напряжения 1, усилитель пилообразного тока 1, расширитель импульсов 2, генератор пилообразного напряжения 2, усилитель пилообразного тока 2, схему подсвета прямого хода развертки 1, схему подсвета прямого хода развертки 2, блок смесителя 1, блок смесителя 2, схему регулировки яркости 1, схему регулировки яркости 2, схему регулировки фокуса 1, схему регулировки фокуса 2, первую и вторую отклоняющие катушки ЭЛТ, шесть управляющих электродов ЭЛТ и две фокусирующие катушки ЭЛТ.
Формирование горизонтальной развертки на экране ЭЛТ устройства индикации видеоимпульсов (52) происходит следующим образом.
Так как длительность прямого хода развертки больше длительности импульса запуска, то перед генератором пилообразного напряжения включают расширитель импульсов, например, ждущий мультивибратор. Его отрицательные импульсы через каждый период следования импульсов запуска запирают на время прямого хода развертки лампу генератора пилообразного напряжения. Пилообразное напряжение развертки, снимаемое с генератора через усилитель пилообразного тока, поступает в отклоняющую катушку и световое пятно отклоняется на всю длину экрана ЗЛТ. Схема подсвета изменяет импульс расширителя по полярности и амплитуде таким образом, чтобы эти импульсы, будучи приложенными к управляющему электроду ЭЛТ, вызывали необходимое свечение экрана при прямом ходе развертки. Техническая реализация устройства индикации видеоимпульсов (52) не вызывает затруднений. См. 1. А.Н. Романов. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, стр. 59-64.
2. И.И. Литвак и др. Основы построения аппаратуры отображения в автоматизированных системах. - М.: Изд-во "Сов. радио", 1975.
Устройства формирования маркера 1 (53) и 2 (54) представляют собой последовательно соединенные, компаратор и ждущий мультивибратор. На один из входов компаратора подают заданное напряжение, а на другой - линейно нарастающее напряжение. В момент равенства амплитуд производится считывание результата. Такое преобразование называют интегрированием с одним углом наклона. Простейшим компаратором является дифференциальный усилитель с большим коэффициентом усиления, построенный на основе транзисторов или операционных усилителей. Ждущие мультивибраторы формируют прямоугольные импульсы заданной длительности и амплитуды (маркеры), которые с их выходов поступают на первый и второй входы устройства индикации видеоимпульсов (52). Аппаратурное построение устройства формирования маркера достаточно подробно приведено в специальной технической литературе. См. 1. П. Хоровиц, У. Хилл. Искусство схемотехники. Том I. Перевод с английского под ред. М.В. Гальперина - М.: Изд-во "Мир", 1983, стр. 212-214.
2. М.И. Филькенштейн. Основы радиолокации - М.: Изд-во "Сов. радио", 1973, стр. 383-387.
7. Блок фиксации несущей частоты сигналов излучения (7) предназначен для фиксации имитируемой несущей частоты сигналов, обнаруженных источников излучения в зоне действия пассивной РЛС.
Блок-схема фиксации несущей частоты сигналов излучения (7) приведена на фиг. 6. Блок фиксации несущей частоты сигналов излучения (7) включает в себя последовательно соединенные первый преобразователь напряжения в код (55) и первую схему сравнения (56), второй преобразователь напряжения в код (57) и вторую схему сравнения (58), а также схему анализа (59) и третью схему сравнения (60), при этом вход первого преобразователя напряжения в код (55) подключен к двенадцатому выходу пульта оператора пассивной РЛС (1), вход второго преобразователя напряжения в код (57) подключен к четырнадцатому выходу пульта оператора пассивной РЛС (1), вход схемы анализа (59) подключен к второму выходу вычислителя (3), первый выход схемы анализа (59) подключен одновременно к второму входу первой схемы сравнения (56)и первому входу блока имитации дальнего тропосферного распространения сигналов (8), второй выход схемы анализа (59) подключен одновременно к второму входу второй схемы сравнения (58) и третьему входу блока имитации дальнего тропосферного распространения сигналов (8), выход второй схемы сравнения (58) подключен к третьему входу вычислителя (3), выход первой схемы сравнения (56) подключен к второму входу вычислителя (3), первый и второй входы третьей схемы сравнения (60) подключены соответственно к первому выходу блока индикаторных устройств (6) и тринадцатому выходу пульта оператора пассивной РЛС (1). Первая, вторая и третья схемы сравнения (56, 58, 60) выполняют операцию сравнения, при которой устанавливается факт выполнения одного из условий
x=y; x>y; x<y,
где 
Операция сравнения заключается в том, что из одного числа вычитают второе и по знаку остатка судят о выполнении двух последних из указанных выше условий. Выполняется такая операция на сумматоре, к которому дополнительно подключается схема для фиксации нулевого кода остатка, который соответствует выполнению первого условия. См. К.Г. Самофалов и др. Электронные цифровые вычислительные машины. - К.: Изд-во "Вища школа", 1976, стр. 159-165.
Первый и второй преобразователи напряжения в код (55, 57) используются для преобразования непрерывных величин в дискретные. Преобразование аналоговой величины в цифровой код является измерительным процессом и происходит путем выполнения ряда операций сравнения измеряемой величины с набором эталонных дискретных величин, имеющих одинаковую природу с преобразуемой аналоговой. Преобразователи напряжения в код (55, 57) состоят из нуль-органа, выполняющего операцию сравнения измеряемой Ux и компенсирующей (уравновешивающей) Ux величин, источника опорного напряжения Eоп, цифрового делителя напряжения, включающего сетку сопротивлений и ключи, цифрового автомата, реализующего один из алгоритмов уравновешивания, генератора тактовых импульсов, синхронизующего работу всех узлов.
См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 379-389.
8. Блок имитации дальнего тропосферного распространения сигналов (8) предназначен для имитации воздействия тропосферы на уровень мощности принимаемых сигналов излучения.
Блок-схема блока имитации дальнего тропосферного распространения сигналов (8) приведена на фиг. 7.
Блок имитации дальнего тропосферного распространения сигналов (8) включает в себя последовательно соединенные первый логический элемент "И" (61), первое внешнее запоминающее устройство (62) и первый преобразователь кода в напряжение (63), второй логический элемент "И" (64), второе внешнее запоминающее устройство (65) и второй преобразователь кода в напряжение (66) при этом первый вход первого логического элемента (61) подключен одновременно к первому выходу блока фиксации несущей частоты сигналов излучения (7) и седьмому входу блока имитации видеосигналов (9), первый вход второго логического элемента (64) подключен одновременно к пятому выходу блока фиксации несущей частоты сигналов излучения (7) и восьмому входу блока имитации видеосигналов (9), вторые входы первого логического элемента (61) и второго логического элемента (64) подключены одновременно к третьему выходу вычислителя (3) и девятому входу блока имитации видеосигналов (9), выходы первого преобразователя кода в напряжение (63) и второго преобразователя кода в напряжение (66) подключены соответственно к первому и шестому входам блока имитации видеосигналов (9).
Первый и второй преобразователи кода в напряжение (63, 66) предназначены для выдачи в аналоговой форме управляющих воздействий на соответствующие устройства. Они состоят из регистра, в который заносится и хранится двоичный код величины, подлежащий преобразованию в аналоговую величину, источника стабильного напряжения и цифрового делителя напряжения, состоящей из декодирующей сетки сопротивлений и прецизионных ключей.
Подробное описание преобразователей кода в напряжение дано в специальной технической литературе. См. Справочник по цифровой вычислительной технике. Под редакцией Б.Н. Малиновского - К., Изд-во "Техника", 1974, стр. 392-394. Первое и второе внешнее запоминающие устройства (62, 65) используются как датчики необходимой информации. Данные устройства - трансформаторного типа, построенные на П-образных, линейных ферритовых сердечниках. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К., Изд-во "Техника", 1974, стр. 322-329.
9. Блок имитации видеосигналов (9) предназначен для имитации принимаемых пассивной РЛС сигналов излучения обнаруженных целей на низкой частоте (видеочастоте) с учетом ряда их характерных параметров и изменения этих параметров (амплитуды, угловой протяженности на экране индикатора и др.) в зависимости от дальности трассы источник излучения - пассивная РЛС, условий распространения сигналов по трассе, амплитудно-частотной характеристики приемного устройства.
Блок-схема блока имитации видеосигналов (8) приведена на фиг. 8.
Блок имитации видеосигналов (9) включает в себя последовательно соединенные имитатор радиолокационных сигналов (67) и первый сумматор (68), имитатор изменения несущей частоты (69) и второй сумматор (70), а также третий сумматор (71) и четвертый сумматор (72), при этом первый, второй, третий, четвертый, пятый, шестой и седьмой входы имитатора радиолокационных сигналов (67) подключены соответственно к выходу второго сумматора (70), выходу четвертого сумматора (72), десятому и девятому выходам пульта оператора пассивной РЛС (1), пятому выходу блока имитации дальнего тропосферного распространения сигналов (8), выходу блока имитации текущего положения антенны (2) и четвертому выходу вычислителя (3), первый выход имитатора радиолокационных сигналов (67) также подключен к первому входу блока фиксации временного интервала решения задачи (10), а второй выход имитатора радиолокационных сигналов (67) подключен одновременно к первому входу третьего сумматора (71), и четвертому входу блока фиксации временного интервала решения задачи (10), второй вход которого в свою очередь подключен к третьему выходу блока имитации дальнего тропосферного распространения сигналов (8), а выход третьего сумматора (71) подключен к десятому входу блока индикаторных устройств (6), второй вход и выход первого сумматора (68) подключены соответственно к первому выходу блока имитации дальнего тропосферного распространения сигналов (9) и девятому входу блока индикаторных устройств (6), второй вход второго сумматора (70) подключен к четвертому выходу блока имитации дальнего тропосферного распространения сигналов (8), второй выход и вход имитатора изменения несущей частоты (69) подключены соответственно к первому входу четвертого сумматора (72) и одиннадцатому выходу пульта оператора пассивной РЛС (1), а второй вход четвертого сумматора (72) подключен к второму выходу блока имитации дальнего тропосферного распространения сигналов (8).
Имитатор радиолокационных сигналов (67) включает в себя четыре схемы сравнения, четыре логических элемента "И", два имитатора диаграммы направленности антенны, четыре модулятора, два генератора тактовых импульсов, два имитатора дальнего тропосферного распространения радиоволн, два триггера Шмитта, два преобразователя напряжения в код.
Работа имитатора радиолокационных сигналов (67) заключается в следующем. С четвертого выхода вычислителя (3) и выхода блока имитации текущего положения антенны (2) на первый и второй входы первой и третьей схем сравнения поступают соответственно коды пеленга источника излучения и текущего азимутального положения пеленгационной антенны. В случае совпадения поступивших кодов первая и третья схемы сравнения вырабатывают управляющие сигналы, открывающие первый и третий логические элементы для прохождения через них кода текущего азимутального положения пеленгационной антенны на входы первого и второго имитаторов диаграммы направленности антенны (ДНА). Первый и второй имитаторы ДНА с учетом кода текущего азимутального положения пеленгационной антенны формируют сигналы, амплитуды которых соответствуют формам огибающих ДН антенны в I и II условных частотных диапазонах. С выходов первого и второго имитаторов ДНА сигналы поступают соответственно на первые входы первого и третьего модуляторов, на вторые входы которых поступают соответственно сигналы с выходов второго и четвертого логического элемента "И". С выходов первого и третьего модуляторов промодулированная последовательность сигналов поступает на первые входы соответственно второго и четвертого модуляторов. На вторые входы второго и четвертого модуляторов поступают сигналы с выходов соответственно первого и второго имитаторов дальнего тропосферного распространения радиоволн (ДТР). Имитаторы ДТР предназначены для формирования уровней амплитуд сигналов излучения с учетом их ослабления при распространении по загоризонтной трассе, т.е. с учетом средних значений уровня ослабления сигналов в зависимости от длины трассы и условий радионаблюдаемости. Промодулированные сигналы с выходов второго и четвертого модуляторов поступают соответственно на входы первого сумматора (68) и третьего сумматора (71).
Имитатор изменения несущей частоты (69) включает в себя два двоичных счетчика, два постоянных запоминающих устройства и два буферных регистра.
Работа имитатора изменения несущей частоты (69) происходит следующим образом. В постоянные запоминающие устройства, состоящие из регистра адреса, дешифратора, формирователей, блока памяти, усилителя считывания, закладываются в определенной последовательности изменения несущей частоты импульсов излучения со своим знаком (±Δf) путем создания жесткой монтажной схемы. Данные последовательности соответствуют заданным Законам изменения несущей частоты источников излучения в I и II условных частотных диапазонах. Адрес величины (±Δf), которую необходимо считать с блока памяти, записывается в регистр адреса с двоичного счетчика. Показания двоичных счетчиков с заданными коэффициентами пересчета формируются с помощью синхроимпульсов, поступающих на входы данных двоичных счетчиков с одиннадцатого выхода пульта оператора пассивной РЛС (1). Адрес величины (±Δf) расшифровывается с помощью дешифратора. Сигнал на выходе возбужденной шины дешифратора поступает в блок формирователей, где он формируется по амплитуде и длительности, после чего подается в избранную ячейку блока памяти. Кодовые сигналы выбранного (±Δf) усиливаются усилителями считывания и поступают на буферный регистр числа.
Таким образом, с помощью дешифратора и блока памяти, выполняющего функции шифратора, осуществляется преобразование кода адреса в код считываемого (±Δf). Двоичный код (±Δf) с выхода соответствующего буферного регистра поступает на первый вход соответствующего второго и четвертого сумматоров (70, 72).
Узлы и блоки, входящие в состав имитатора изменения несущей частоты (69), подробно описаны в специальной технической литературе. См. 1. Е.А. Дроздов и др. Многопрограммные цифровые вычислительные машины - М.. Воениздат, 1974, стр. 212-220.
2. Е.А. Дроздов и др. Электронные цифровые вычислительные машины - М.: Воениздат, 1968, стр. 244-262.
3. Справочник по цифровой вычислительной технике. Под редакцией Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 96-108.
4. М.И. Филькенштейн. Основы радиолокации - М., Изд-во "Сов. радио", 1973, стр. 383-387.
Первый, второй, третий и четвертый сумматоры (68, 70, 71, 72) предназначены для суммирования N-разрядных величин и состоят из N-одноразрядных сумматоров, число которых равно числу разрядов слагаемых с учетом знаковых разрядов, с соединением выхода, на котором получается сигнал переноса данного разряда, с входом для сигнала переноса соседнего, более старшего разряда.
Техническая реализация сумматоров подробно описана в технической литературе. См. 1. Справочник по цифровой вычислительной технике. Под редакцией Б.Н. Малиновского. К., Изд-во "Техника", 1974, стр. 182-200.
2. С.В. Самсоненко. Цифровые методы оптимальной обработки радиолокационных сигналов - М.: Воениздат, 1968, стр. 38-43.
10. Блок фиксации времени обнаружения целей (10) предназначен для фиксирования времени выполнения операций управления пассивной РЛС в процессе обнаружения источников излучения в заданном пространственном секторе.
Блок-схема блока фиксации времени обнаружения целей (10) приведена на фиг. 9.
Блок фиксации времени обнаружения целей (10) включает в себя последовательно соединенные логический элемент "ИЛИ" (73), триггер (74), логический элемент "И" (75) и двоичный счетчик (76), при этом первый и второй входы логического элемента "ИЛИ" (73) подключены соответственно к первому и четвертому выходам блока имитации видеосигналов (9), второй вход логического элемента "И" (75) подключен к пятнадцатому выходу пульта оператора пассивной РЛС (1), вторые входы триггера (74) и двоичного счетчика (76) подключены одновременно к пятому выходу вычислителя (3), а выход двоичного счетчика (76) подключен к четвертому входу вычислителя (3). Двоичный счетчик (76) с двоичным позиционным кодированием представляет узел, состоящий из последовательно соединенных триггерных ячеек, управляемых по счетному входу. Максимальное количество состояний N-разрядного двоичного счетчика можно определить по соотношению M=2N, а емкость счетчика SN=2N-1. Числовое выражение текущего состояния двоичного счетчика 
Выход двоичного счетчика (76) подключен к четвертому входу вычислителя (3). См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 176.
Триггер (74), выполняющий коммутирующую функцию, является самым распространенным элементом дискретной техники. См. М.И. Филькенштейн. Основы радиолокации - М.: Изд-во "Сов. радио", 1973, стр. 383-387.
11. Блок имитации приемного устройства (11) предназначен для имитации работы приемника прямого усиления, используемого в пассивной РЛС.
Блок-схема блока имитации приемного устройства (II) приведена на фиг. 10.
Блок имитации приемного устройства (11) включает в себя последовательно соединенные схему сравнения (77) и первый логический элемент "ИЛИ" (78), схему формирования управляющего сигнала (79), логический элемент "НЕ" (80), логический элемент "И" (81) и второй логический элемент "ИЛИ" (82), а также третий логический элемент "ИЛИ" (83), при этом первый и второй входы схемы сравнения (77) подключены соответственно к выходу блока имитации текущего положения антенны (2) и четвертому выходу вычислителя (3), второй вход и выход первого логического элемента "ИЛИ" (78) подключены соответственно к выходу схемы формирования управляющего сигнала (79) и первому входу логического элемента "И" (12), первый, второй входы и выход третьего логического элемента "ИЛИ" (83) подключены соответственно к второму, третьему выходам блока фиксации несущей частоты сигналов излучения (7) и второму входу логического элемента "И" (81), второй вход и выход второго логического элемента "ИЛИ" (82) подключены соответственно к четвертому выходу блока фиксации несущей частоты сигналов излучения (7) и пятому входу вычислителя (3).
Схема формирования управляющего сигнала (79) предназначена для формирования признака работы приемника прямого усиления и включает в себя последовательно соединенные источник питания, кнопку, формирователь одиночного импульса 1 и триггер, а также формирователь одиночного импульса 2, при этом вход формирователя одиночного импульса 2 подключен к входу формирователя одиночного импульса 1, а выход формирователя одиночного импульса 2 подключен к нулевому входу триггера. При включении кнопки замыкается электрическая цепь и формирователь одиночного импульса 1 формирует одиночный импульс, устанавливающий триггер в единичное состояние. При включении кнопки размыкается электрическая цепь и формирователь одиночного импульса 2 формирует одиночный импульс, устанавливающий триггер в нулевое состояние. Таким образом, формируется управляющий сигнал соответствующий включению приемника прямого усиления. См. К.Г. Самофалов и др. Электронные цифровые вычислительные машины - К., Изд-во "Вища школа", 1976 г. Логический элемент "НЕ" реализует функцию инверсии См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 96-108.
12. Логические элементы "И" (12, 15) реализуют переключательную функцию конъюнкции и представляет собой многополосники с двумя входами и одним выходом. См. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского - К.: Изд-во "Техника", 1974, стр. 96-108.
13. Блок имитации параметров адаптивного обзора (13) предназначен для регулировки угловой скорости вращения пеленгационной антенны и изменения энергетического параметра сигналов обнаруженной РЛС в зависимости от скорости вращения пеленгационной антенны.
Блок-схема блока имитации параметров адаптивного обзора (13) приведена на фиг. 11.
Блок имитации параметров адаптивного обзора (13) включает в себя последовательно соединенные первый логический элемент "И" (84), первый входной регистр (85), первую схему сравнения (86), второй логический элемент "И" (87), вторую схему сравнения (88) третий логический элемент "И" (89) и ждущий мультивибратор (90), четвертый логический элемент "И" (91), второй входной регистр (92), третью схему сравнения (93), пятый логический элемент "И" (94) и первый сумматор (95), шестой логический элемент "И" (96) и третий входной регистр (97); седьмой логический элемент "И" (98), четвертый входной регистр (99), умножитель (100) и выходной регистр (101), регистр констант (102) и второй сумматор (103), а также пятый входной регистр (104), при этом первый вход первого логического элемента "И" (84) и второй вход второго логического элемента "И" (87) подключены к выходу блока имитации текущего положения антенны (2), первые входы четвертого и шестого логических элементов "И" (91, 96) подключены соответственно к выходу буферного запоминающего устройства (4) и пятнадцатому выходу пульта оператора пассивной РЛС (1), вторые входы первого, четвертого и шестого логических элементов "И" (84, 91, 96) подключены к семнадцатому выходу пульта оператора пассивной РЛС (1), второй вход третьего логического элемента "И" (89) подключен к выходу первой схемы сравнения (86), выход ждущего мультивибратора (90) подключен к второму входу блока имитации текущего положения антенны (2), выход третьего входного регистра (97) подключен к второму входу третьей схемы сравнения (93), второй вход пятого логического элемента "И" (94) подключен к выходу буферного запоминающего устройства (4), второй вход и выход первого сумматора (95) подключены соответственно к выходу регистра констант (102) и второму входу первой схемы сравнения (86), первый и второй входы седьмого логического элемента "И" (98) подключены соответственно к выходу буферного запоминающего устройства (4) и выходу третьего логического элемента "И" (89), выход выходного регистра (101) подключен к второму входу логического элемента "ИЛИ" (16), вход и выход второго сумматора (103) подключены соответственно к выходу пятого логического элемента "И" (94) и второму входу второй схемы сравнения (88), вход и выход пятого входного регистра (104) подключены соответственно к шестнадцатому выходу пульта оператора пассивной РЛС и второму входу умножителя (100).
Элементы, схемы и регистры, входящие в состав блока имитации параметров адаптивного обзора (13), являются широко распространенными элементами дискретной техники, их электрические параметры подробно приведены в специальной технической литературе См. 1. Справочник по цифровой вычислительной технике. Под ред. Б.Н. Малиновского К.: Изд-во "Техника", 1974, стр. 96-108. 2. К.Г. Самофалов и др. Электронные цифровые вычислительные машины - К.: Изд-во "Вища школа", 1976. 3. Ю.Г. Чугаев и др. "Электронные и цифровые вычислительные машины" - М., Воениздат, 1962.
Блок имитации параметров адаптивного обзора (13) функционирует следующим образом. Перед началом тренировки оператора корабельной ПРЛС с 16-го выхода пульта оператора пассивной РЛС (1) вводится в пятый входной регистр (104) константа для увеличения энергетического параметра обнаруженной РЛС при реализации режима адаптивного обзора пространства, пеленгационной антенной. Энергетический параметр РЛС - количество пакетов сигналов излучения РЛС, принятых супергетеродинным приемником при перестройке в заданном частотном диапазоне за время прохождения пеленгационной антенной направления на РЛС. В режиме поиска излучающих РЛС пеленгационная антенна сканирует со скоростью w=2°/c, заданной с пульта оператора пассивной РЛС (1). При включении режима адаптивного обзора пеленгационная антенна, находясь в стробе Пц±2°, сканирует с меньшей скоростью w=0,3°/с, тем самым увеличивается время контакта пеленгационной антенны с РЛС. А значит, возрастает энергетический параметр обнаруженной РЛС примерно в 5-7 раз, что способствует более стабильному сопровождению РЛС и эффективному решению задачи выработки координат обнаруженного источника излучения с целью применения бортового оружия.
При принятии обучаемым оператором решения о включении режима адаптивного обзора сигнал управления с семнадцатого выхода пульта оператора пассивной РЛС (1) одновременно поступает на входы логических элементов "НЕ" (14), И1 (84), И4 (91), И6 (96). Логические элементы "И1" (84), И4 (91) и "И6" (96) открываются для прохождения через них соответственно Птек.ант., формуляра данных цели и Nц. Двоичный код Птек.ант. поступает в первый входной регистр (85), формуляр данных цели поступает во второй входной регистр (92), а номер обнаруженной цели поступает в третий входной регистр (97). С выхода логического элемента "НЕ" (14) проинвертированный сигнал управления (включение адаптивного режима) приходит на первый вход второго логического элемента "И2" (15) и закрывает его, тем самым формуляр данных цели с выхода буферного запоминающего устройства (4) поступает на входы четвертого логического элемента "И4" (91) и седьмого логического элемента "И7" (98).
С выходов второго входного регистра (92) и третьего входного регистра (97) формуляр данных цели и номер цели поступают в третью схему сравнения (93), где происходит сравнение номеров цели. В случае сравнения сигнал управления с выхода третьей схемы сравнения (93) поступает на первый вход пятого логического элемента "И" (94) и открывают его для прохождения через него формуляра данных цели в первый сумматор (95) и второй сумматор (102). В первом сумматоре (95) осуществляется операция Пц-2°, а во втором сумматоре (103) - Пц+2°. Константа 2° в сумматоры поступает с выхода регистра констант (102). С выходов первого сумматора (95) и второго сумматора (103) двоичные коды Пц-2° и Пц+2° поступают на вторые входы соответственно первой схемы сравнения (86) и второй схемы сравнений (88).
С первой схемы сравнения (86) сигнал управления поступает одновременно на входы второго логического элемента "И" (87) и третьего логического элемента "И" (89) открывая их. Через открытый второй логический элемент "И" (87) на вторую схему сравнения (88) в процессе работы тренажера поступает двоичный код Птек.ант., где осуществляется операция Птек.ант.≤Пц+2°. В случае выполнения условия Птек.ант.≤Пц+2° с выхода второй, схемы сравнения (88) сигнал управления поступает на соответствующий вход третьего логического элемента "И" (89). При одновременном наличии на входах третьего логического элемента "И" (89) сигналов управления с выходов первой (86) и второй схемы сравнения (88) на выходе третьего логического элемента "И" (89) возникает сигнал, который поступает на вход ждущего мультивибратора (90) и на второй вход седьмого логического элемента "И" (98). Ждущий мультивибратор (90), получив сигнал с выхода третьего логического элемента "И" (89), формирует сигнал заданной длительности и амплитуды для управления скоростью вращения вала двигателя следящей системы (30), входящей в состав блока имитации текущего положения антенны (2). Одновременно с этим через открытый седьмой логический элемент "И" (98) в четвертый входной регистр (99) и далее на вход умножителя (100) поступает формуляр данных цели с выхода буферного запоминающего устройства (4). На другой вход умножителя (100) с выхода пятого входного регистра (104) поступает константа для энергетического параметра РЛС. В умножителе (100) осуществляется операция ЭРЛС·const, где ЭРЛС - энергетический параметр, входящий в состав формуляра данных. С выхода умножителя (100) скорректированный формуляр данных цели в части энергетического параметра поступает в выходной регистр (101) и далее с выхода последнего на второй вход логического элемента "ИЛИ" (16), с выхода которого - на вход оперативного запоминающего устройства (5). Таким образом, блок имитации параметров адаптивного обзора (13) управляет скоростью вращения пеленгационной антенны (уменьшает по сравнению с рабочим режимом) в режиме адаптивного обзора и корректирует энергетический параметр обнаруженной РЛС в зависимости от скорости вращения пеленгационной антенны.
Рассмотрим функционирование тренажера для обучения операторов корабельных пассивных радиолокационных систем, представленного на чертеже фиг. 1, в который введены предполагаемые блоки, элементы, схемы и связи.
Перед началом тренажа руководитель обучения с помощью устройства ввода с перфокарт (50) вводит в оперативную память вычислителя (3) совокупность таких данных:
- информацию об РЛС вероятного противника как с перестраиваемой, так и неперестраиваемой несущей частотой;
- формуляры основных радиотехнических параметров заданных РЛС;
- координаты местоположения РЛС относительно местонахождения корабельной ПРЛС;
- параметры движения носителей РЛС и ПРЛС;
- условия распространения сигналов РЛС на трассах при ДТР;
- программы, имитирующие непрерывную или паузную работу заданных РЛС.
Помимо этого руководитель обучения с пульта оператора пассивной РЛС (1) с помощью формирователя кодовой последовательности (23) вводит в блок имитации параметров адаптивного обзора (13) в пятый входной регистр (104) константу для энергетического параметра РЛС, необходимую при реализации пеленгационной антенной режима адаптивного обзора пространства.
Введенная информация через селекторные каналы СК (35, 36) с помощью устройства управления НМД (39) и устройства управления НМЛ (41) далее фиксируется на НМД (40) и НМЛ (42). Перечисленные устройства входят в состав вычислителя (3). Через селекторный канал СК (37) поступает в вычислитель (3) информация, которая необходима для имитации конкретной радиотехнической, обстановки. Работу селекторного канала СК (37) регламентируют интерфейс ввода-вывода (43), устройство УВУ (44) и коммутирующее устройство (45).
Информационная часть заданной в процессе тренажера радиотехнической обстановки формируется следующими устройствами при их совместной работе: пультом оператора пассивной РЛС (1), блоком имитации текущего положения антенны (2), вычислителем (3), буферным запоминающим устройством (4), оперативным запоминающим устройством (5), блоком индикаторных устройств (6), блоком фиксации несущей частоты сигналов излучений (7), блоком имитации дальнего тропосферного распространения сигналов (8), блоком имитации видеосигналов (9), блоком фиксации времени обнаружения целей (10), блоком имитации приемного устройства (11) и первым логическим элементом "И" (12).
При реализации в тренажере радиотехнической обстановки траектории движения носителей РЛС задаются на плоскости в прямоугольной системе координат, за начало которой принимается местоположение ПРЛС.
Модель движения носителей РЛС - полиномиальная модель движения.
Имитируемые радиолокационные сигналы РЛС вероятного противника на видеочастоте поступают со второго и третьего выходов блока имитации видеосигналов (9) на девятый и десятый входы блока индикаторных устройств (6), которые являются первыми информационными входами блоков смесителей. Со второго выхода блока имитации видеосигналов (9) поступают видеосигналы 1 условного частотного диапазона, а с третьего выхода того же блока - видеосигналы II условного частотного диапазона. Далее видеосигналы с выходов блоков смесителей, входящих в состав устройства индикации видеоимпульсов (52), поступают на электроды ЭЛТ. На экране ЭЛТ, входящей в устройство индикации видеоимпульсов (52), имитируемые радиолокационные сигналы воспроизводятся в виде соответствующих отметок. На вторые информационные входы блоков смесителей поступают прямоугольные импульсы-маркеры, формируемые соответственно устройством формирования маркера 1 (53) и устройством формирования маркера 2 (54).
Таким образом, индицируемые на экране ЭЛТ устройства индикации видеоимпульсов (52) видеоимпульсы сигналов РЛС и вторичные сигналы в виде прямоугольных импульсов заданной длительности образуют модель радиолокационной обстановки в зоне действия аппаратуры пассивной РЛС.
В процессе обучения оператор ПРЛС может осуществить полуавтоматический съем данных с ЭЛТ, для чего он совмещает импульсы-маркеры с отметками целей с помощью первого (22) и второго формирователя управляющего напряжения (24), с выходов которых снимаются управляющие напряжения. Данные управляющие напряжения с третьего и пятого выходов пульта оператора пассивной РЛС (1) поступают соответственно на вторые входы первого устройства формирования маркера (54) и второго устройства формирования маркера (54). Одновременно с этим управляющие напряжения с двенадцатого и четырнадцатого выходов пульта оператора пассивной РЛС (1) поступают на второй и четвертый входы блока фиксации несущей частоты сигналов излучения (7), которые являются входами собственно ПНК 1 (55) и ПНК 2 (57).
На первые входы устройств формирования маркеров (53, 54) поступают пилообразные напряжения с выходов первого (20) и второго генератора пилообразного напряжения (21).
В момент равенства напряжений производится запуск ждущих мультивибраторов, формирующих прямоугольные импульсы-маркеры. С выходов преобразователей ПНК (55, 57) постоянное напряжение в двоичном коде поступает на первые входы первой (56) и второй схемы сравнения (58), на вторые входы которых поступают двоичные коды несущей частоты радиолокационных сигналов источников излучения соответственно с первого и второго выходов схемы анализа (59). Схема анализа (59) выполняет функцию определения условного частотного диапазона (I или II), к которому принадлежит имитируемый радиолокационный сигнал излучения, и совместно с первой и второй схемами сравнения (56, 58) формирует управляющие сигналы, которые со второго и третьего выходов блока фиксации несущей частоты сигналов излучения (7) поступают на первый и второй входы третьего логического элемента "ИЛИ" (83) и дальше с его выхода на второй вход логического элемента "И" (81), на первый вход которого поступает сигнал с выхода логического элемента "НЕ" (80). Логический элемент "НЕ" (80) инвертирует управляющий сигнал. В момент одновременного поступления сигналов на входы логического элемента "И" (81) на его выходе формируется управляющий сигнал "снять показание двоичного счетчика". Управляющий сигнал поступает на первый вход второго логического элемента "ИЛИ" (82) и дальше с его выхода на пятый вход вычислителя (3). Таким способом оценивается время обнаружения источников излучения с детерминированной несущей частотой, что является важным фактором в подготовке операторов пассивных РЛС.
Указанные выше логические элементы "ИЛИ" (82, 83), "НЕ" (80) и "И" (81) входят в состав блока имитации приемного устройства (11). Получив сигнал "снять показание двоичного счетчика" вычислитель (3) переходит на подпрограмму перезаписи показаний двоичного счетчика (76), входящего в состав блока фиксации времени обнаружения целей (10). Результат выдается в устройство АЦПУ (48), входящее в вычислитель (3), где печатается в буквенно-цифровом виде на бумажном носителе. Работа двоичного счетчика (76) регламентируется логическим элементом "ИЛИ" (73), триггером (74) и логическим элементом "И" (75), которые также входят в состав блока фиксации времени обнаружения целей (10).
Обнуление двоичного счетчика (76) и изменение состояния триггера (74) осуществляется управляющим сигналом "обнуление", формируемым вычислителем (3) и поступающим на вторые входы данных устройств с пятого выхода вычислителя (3). Первый и второй входы логического элемента "ИЛИ" (73) подключены соответственно к первому и четвертому выходам блока имитации видеосигналов (9), а второй вход логического элемента "И" (75) подключен к пятнадцатому выходу пульта оператора пассивной РЛС (1). Такая функциональная связь логических элементов "ИЛИ" (73), "И" (75), триггера (74) и двоичного счетчика (76) обеспечивает нормальное функционирование по своему назначению блока фиксации времени обнаружения целей (10).
В состав блока индикаторных устройств (6) входит устройство знаковой индикации (51), состоящее из дешифратора знака, усилителя подсвета, ЭЛТ, формирователя огибающей, усилителя постоянного тока, распределителя, формирователя адреса.
С помощью перечисленных устройств на экране ЭЛТ устройства знаковой индикации (51) отображаются в буквенно-цифровом виде формуляры основных радиотехнических параметров плюс пеленги обнаруженных источников излучения, в том числе и ложных источников излучения. Для этого с первого выхода вычислителя (3) в буферное запоминающее устройство (4) поступают формуляры основных радиотехнических параметров источников излучения, которые введены в оперативную память вычислителя (3). Объем памяти буферного запоминающего устройства (4) рассчитан на максимальное количество формуляров. Буферное запоминающее устройство (4) функционирует совместно с оперативным запоминающим устройством (5), формуляры данных в которые переписываются при наличии сигнала Птек.ант. - двоичного кода текущего положения пеленгационной антенны. Двоичный код Птек.ант. является адресом ячейки, откуда осуществляется перезапись информации из буферного (4) в оперативное запоминающее устройство (5). Необходимым условием наличия двоичного кода Птек.ант. на выходе первого логического элемента "И" (12) является одновременное поступление на первый и второй входы логического элемента "И" (12) сигналов с выхода блока имитации текущего положения антенны (2) и второго выхода блока имитации приемного устройства (11). Первый вход первого логического элемента "ИЛИ" (78) подключен к выходу схемы сравнения (77), в которой формируется управляющий сигнал при выполнении условия:

Пц - пеленг на цель; θо - ширина главного лепестка ДН антенны пассивной РЛС. Рассмотренное условие эквивалентно приему сигналов излучения главным лепестком ДН антенны, а схема сравнения (77) имитирует работу устройства компенсации сигналов излучения, принятых боковыми лепестками ДН антенны в случае работы супергетеродинного приемника. В процессе работы тренажера двоичный код Птек.ант. с выхода блока имитации текущего положения антенны (2) поступает на первый вход схемы сравнения (77), а на второй вход этой же схемы поступает двоичный код Пц с четвертого выхода вычислителя (3).
С помощью схемы формирования управляющего сигнала (79), входящий в состав блока имитации приемного устройства (11), осуществляется имитация включения обучаемым оператором приемника прямого усиления, когда компенсация приема сигналов излучения боковыми лепестками ДН антенны пассивной РЛС отсутствует.
Устройство знаковой индикации (51) предоставляет оператору возможность при выполнении им учебной задачи визуально определить факт обнаружения источника излучения типового ордера. Работа данного устройства регламентируется синхроимпульсами, формируемыми в пульте оператора пассивной РЛС (1) и поступающими с его восьмого выхода на восьмой вход блока индикаторных устройств (6). Анализируя формуляры данных, характеризующие истинные и ложные источники излучения, отображаемые на экране ЭЛТ устройства знаковой индикации (51), обучаемый оператор осуществляет набор с помощью формирователя кодовой последовательности (23), входящего в состав пульта оператора пассивной РЛС (1), двоичный код Nц. Далее двоичный код Nц с выхода буферного регистра, входящего в состав формирователя кодовой последовательности (23), управляемого дешифратором, входящим в состав формирователя тактовых импульсов (18), поступает на первый вход третьей схемы сравнения (60), на второй вход которой поступает двоичный код 
Дешифратор, входящий в состав формирователя тактовых импульсов (18), и буферный регистр формирователя кодовой последовательности (23) входят в состав пульта оператора пассивной РЛС (1), а третья схема сравнения (60) - блока фиксации несущей частоты сигналов излучения (7). В случае совпадения двоичных кодов Nц и 
Имитация радиолокационных сигналов в тренажере осуществляется блоком имитации видеосигналов (9). Работа блока имитации видеосигналов (9) в I условном частотном диапазоне происходит следующим образом. С выхода блока имитации текущего положения антенны (2) и четвертого выхода вычислителя (3) соответственно на пятый и десятый входы блока имитации видеосигналов (9), которые являются одновременно первым и вторым входами схемы сравнения, входящей в состав имитатора радиолокационных сигналов (67), поступают двоичные коды Пц и Птек.ант.. В случае совпадения двоичных кодов Пц и Птек.ант. в схеме сравнения вырабатывается управляющий сигнал, который открывает первый логический элемент "И" для прохождения через него двоичного кода Птек.ант. на вход первого имитатора ДН антенны. Имитатор ДН антенны с учетом кода Птек.ант. формирует сигналы, амплитуда которых соответствует форме огибающей ДН антенны в I условном частотном диапазоне. С выхода первого имитатора ДН антенны промодулированные сигналы поступают на первый вход первого модулятора, на второй вход которого поступают сигналы с выхода второго логического элемента "И". В свою очередь на первый вход второго логического элемента "И" поступают сигналы с выхода первого триггера Шмитта, а на второй вход - с выхода первого генератора тактовых импульсов. Первый триггер Шмитта управляется второй схемой сравнения, на первый и второй входы которой поступают сигналы соответственно с выходов первого преобразователя напряжения в код и второго сумматора (70). Преобразователь напряжения в код преобразует пилообразное напряжение, характеризующее работу супергетеродинного приемника, в двоичный код. Пилообразное напряжение поступает на вход первого преобразователя напряжения в код с девятого выхода пульта оператора пассивной (РЛС (1).
Указанные выше первая схема сравнения, первый и второй логические элементы "И", первый имитатора ДН антенны, первый модулятор и первый преобразователь напряжения в код входят в состав имитатора радиолокационных сигналов (67).
В первом модуляторе последовательность прямоугольных импульсов, вырабатываемая первым генератором тактовых импульсов, модулируется ДН пеленгационной антенны и дальше поступает на первый информационный вход второго модулятора. Второй модулятор предназначен для формирования уровня амплитуд сигналов излучения с учетом их ослабления при ДТР. С этой целью на второй информационный вход второго модулятора с четвертого выхода вычислителя (3) поступает среднее значение уровня ослабления сигналов в зависимости от длины трассы и условий радионаблюдаемости. Промодулированные сигналы с выхода второго модулятора поступают на первый вход первого сумматора (68), который входит в состав блока имитации видеосигналов (9). Генератор тактовых импульсов и модуляторы входят в состав имитатора радиолокационных сигналов (67). Работа блока имитации видеосигналов (9) по имитации видеосигналов во II условном частотном диапазоне происходит по схеме, аналогичной работе в I условном частотном диапазоне.
Итак, блок имитации видеосигналов (9) осуществляет имитацию радиолокационных сигналов на видеочастоте в зависимости от дальности расположения источника излучения, условий распространения сигналов, амплитудно-частотной характеристики приемника ПРЛС. В процессе имитации радиотехнической обстановки большая роль отводится блоку имитации дальнего тропосферного распространения сигналов (8). Необходимость введения в состав тренажера блока имитации дальнего тропосферного распространения сигналов (8) обусловлена необходимостью учета потерь усиления пеленгационной антенны, представленных в виде зависимости величины 
Следует отметить также особенности имитации работы приемных устройств пассивной РЛС. В случае работы супергетеродинного приемника схема сравнения (77), входящая в состав блока имитации приемного устройства (11), имитирует работу устройства компенсации сигналов излучения, принятых боковыми лепестками ДН антенны. В случае работы приемника прямого усиления компенсация приема сигналов излучения, принятых боковыми лепестками ДН антенны, принципиально исключена. Приемник прямого усиления обладает возможностью одновременного приема сигналов излучения во всем частотном диапазоне и с любых направлений по азимуту. Имитация работы приемника прямого усиления в тренажере осуществляется следующим образом. Обучаемый оператор с помощью схемы формирования управляющего сигнала (79) формирует управляющий сигнал, который постоянно поступает на второй вход первого логического элемента "ИЛИ" (78). На первый вход первого логического элемента "ИЛИ" (78) с выхода схемы сравнения (77) поступает двоичный код Птек.ант., совпадающий с кодом Пц. С выхода первого логического элемента "ИЛИ" (78) двоичный код Птек.ант. поступает на второй вход первого логического элемента "И" (12), тем самым открывает его для прохождения на второй управляющий вход буферного запоминающего устройства (4) двоичного кода Птек.ант. с выхода блока имитации текущего положения антенны (2). Двоичный код Птек.ант. является адресом ячейки, откуда осуществляется выборка формуляра данных обнаруженного источника излучения из буферного запоминающего устройства (4) в оперативное запоминающее устройство (5) через второй логический элемент "И" (15) и логический элемент "ИЛИ" (16). Таким образом, в оперативном запоминающем устройстве (5) в процессе работы тренажера хранятся формуляры всех источников излучения типового ордера, обнаруженного в зоне действия пассивной РЛС.
Обучаемый оператор, наблюдая визуально за хаотически появляющимися видеоимпульсами на экране ЭЛТ устройства индикации видеоимпульсов (52) в случае обнаружения источников излучения с перестраиваемой несущей частотой от импульса к импульсу, не может выделить компактный пакет видеоимпульсов - энергетический параметр РЛС. В такой ситуации он вынужден включить приемник прямого усиления, признаком работы которого будет управляющий сигнал, формируемый схемой формирования управляющего сигнала (79) и поступающий на входы логического элемента "НЕ" (80) и первого логического элемента "ИЛИ" (79). Одновременно с имитацией включения приемника прямого усиления обучаемый оператор с помощью блока имитации текущего положения антенны (2) осуществляет пространственную переориентацию пеленгационной антенны в направление предполагаемого местонахождения источника излучения с перестраиваемой несущей частотой. Критерием правильного пространственного ориентирования пеленгационной антенны является условие индикации хаотически появляющихся видеоимпульсов с максимальной амплитудой.
В процессе выполнения пространственного поиска, когда азимут носителя источника излучения с перестраиваемой несущей частотой окажется внутри строба 
Двоичный код Nц с тринадцатого выхода пульта оператора пассивной РЛС (1) поступает на первый вход третьей схемы сравнения (60), на второй вход которой поступает код Nц с первого выхода блока индикаторных устройств (6). Последний код Nц входит в состав формуляра данных. В случае совпадения сравниваемых кодов Nц с выхода третьей схемы сравнения (60) на второй вход второго логического элемента "ИЛИ" (82) поступает управляющий сигнал. При наличии данного управляющего сигнала с выхода второго логического элемента "ИЛИ" (82) на пятый вход вычислителя (3) выдается сигнал "снять показания двоичного счетчика". Вычислитель (3) переходит на подпрограмму перезаписи показаний двоичного счетчика (76) для фиксации времени обнаружения источника излучения с перестраиваемой несущей частотой.
Итак, пульт оператора пассивной РЛС (1), блок имитации текущего положения антенны (2), вычислитель (3), буферное запоминающее устройство (4), оперативное запоминающее устройство (5), блок индикаторных устройств (6), блок фиксации несущей частоты сигналов излучения (7), блок имитации дальнего тропосферного распространения сигналов (8), блок имитации видеосигналов (9), блок фиксации времени обнаружения целей (10), блок имитации приемного устройства (11) и первый логический элемент "И" (12) позволяют выработать у обучаемого оператора практические навыки управления корабельной ПРЛС при обнаружении РЛС с детерминированной и перестраиваемой несущей частотой в условиях ДТР. При этом большое значение отводится заданию обучаемым оператором параметров пространственного и частотного поисков, которые оказывают существенное влияние на стабильность приема излучений РЛС в зоне действия аппаратуры корабельной ПРЛС и тем самым на эффективность определения координат местонахождения носителей РЛС и применения бортового оружия. В тренажер введены блок имитации параметров адаптивного обзора (13), логический элемент "НЕ" (14), второй логический элемент "И" (15) и логический элемент "ИЛИ" (16), которые дают возможность обучаемому оператору задавать (изменять) параметры пространственного поиска с целью оптимизации приема излучений РЛС. Обучаемый оператор учится в той или иной радиотехнической обстановке задавать параметры пространственного и частотного поисков излучений РЛС. Это важный этап в обучении операторов корабельных ПРЛС, так как наиболее типичными условиями работы ПРЛС является такая радиотехническая обстановка, которая будет характеризоваться незначительным энергетическим параметром РЛС, т.е. приемом 1-2 пакетов импульсов излучения, когда эффективность определения координат местонахождения при этом очень низкая.
В таких ситуациях при анализе обучаемым оператором отображаемых на экране устройства знаковой индикации (51) формуляров данных РЛС, в состав которых входит энергетический параметр, им должно быть принято решение об изменении параметров пространственного поиска, т.е. должен быть задан режим адаптивного обзора. Суть режима адаптивного обзора состоит в следующем. При подходе пеленгационной антенны ПРЛС к направлению на выбранные цели скорость азимутального вращения антенны снижается до величины 0,3°/с, а после прохода направлений на цели скорость увеличивается до величины, заданной с пульта оператора пассивной РЛС.
Таким образом, адаптивный режим работы пеленгационной антенны ПРЛС обеспечивает повышение вероятности приема пакетов сигналов в направлении выбранных целей и точности определения координат местонахождения носителей РЛС, что является определяющим фактором при использовании бортового оружия.
Невозможность принятия обучаемым оператором оперативного решения об изменении параметров пространственного поиска в той или иной конкретной радиотехнической обстановке и отсутствие умений по оптимизации пространственного поиска могут приводить к непредсказуемым последствиям при решении боевой задачи на МТВД. Поэтому возможность обучить операторов ПРЛС применению адаптивного режима работы пеленгационной антенны в сложной радиотехнической обстановке имеет первостепенное значение при создании тренажеров для обучения операторов корабельных ПРЛС. В рассматриваемом тренажере режим адаптивного обзора пространства осуществляется следующим образом. При решении конкретной задачи обучения на тренажере оператор ПРЛС анализируя энергетический параметр, входящий в состав формуляра данных и отображаемый на экране устройства знаковой индикации (51), принимает решение о включении режима адаптивного обзора пространства. Управляющий сигнал включения режима адаптивного обзора с семнадцатого выхода пульта оператора пассивной РЛС (1) одновременно поступает на вход логического элемента "НЕ" (14) и вторые входы первого (84), четвертого (91) и шестого элемента "И" (96). Первый (84), четвертый (91) и шестой логический элемент "И" (96) открываются для прохождения через них соответственно двоичного кода Птек.ант., формуляра данных обнаруженной цели и двоичного кода Nц.
Двоичный код Птек.ант. с выхода первого логического элемента "И" (84) поступает на вход первого входного регистра (85) и далее с выхода последнего на первый вход первой схемы сравнения (86).
Формуляр данных цели с выхода четвертого логического элемента "И" (91) поступает на вход второго входного регистра (92) и далее с его выхода на первый вход третьей схемы сравнения (93). Двоичный код Nц с выхода шестого логического элемента "И" (96) поступает на вход третьего входного регистра (97) и далее с его выхода на второй вход третьей схемы сравнения (93). Одновременно с этим с выхода логического элемента "НЕ" (14) проинвертированный управляющий сигнал (включение адаптивного режима) поступает на первый вход второго логического элемента "И" (15) и закрывает его для прохождения формуляров данных обнаруженных целей через логический элемент "ИЛИ" (16) на вход оперативного запоминающего устройства (5). При этом формуляр данных цели с выхода буферного запоминающего устройства (4) поступает на первые входы четвертого логического элемента "И" (91) и седьмого логического элемента "И" (98). В третьей схеме сравнения (93) осуществляется операция сравнения номеров обнаруженной цели, причем сравниваются номер цели из формуляра данных и номер цели, набранный обучаемым оператором на пульте оператора пассивной РЛС (выбранная цель для обработки). В случае сравнения номеров цели с выхода третьей схемы сравнения (93) управляющий сигнал поступает на первый вход пятого логического элемента "И" (94) и открывает его для прохождения через него формуляра данных обнаруженной цели на первые входы первого сумматора (95) и второго сумматора (103). Вторые входы первого сумматора (95) и второго сумматора (103) подключены к выходу регистра констант (102). В первом сумматоре (95) осуществляется операция (Пц-2°), а во втором сумматоре (103) - операция (Пц+2°), где Пц - пеленг на обнаруженную цель; константа 2° хранится в регистре констант (102). С выходов первого сумматора (95) и второго сумматора (103) двоичные коды величин (Пц-2°) и (Пц+2°), образующих строб по пеленгу на обнаруженную цель, поступают на вторые входы соответственно первой схемы сравнения (86) и второй схемы сравнения (88). В первой схеме сравнения (86) осуществляется операция Птек.ант.≥(Пц-2°), для чего на первый вход первой схемы сравнения (86) с выхода первого входного регистра (85), как уже упоминалось, поступает двоичный код Птек.ант.. В случае выполнения условия Птек.ант.≥(Пц-2°) с выхода первой схемы сравнения (86) управляющий сигнал поступает одновременно на первый вход второго логического элемента "И" (87) и второй вход третьего логического элемента "И" (89), открывая их. Через второй логический элемент "И" (87) на первый вход второй схемы сравнения (88) в процессе работы тренажера поступает двоичный код Птек.ант., а на второй вход второй схемы сравнения (88) с выхода второго сумматора (103) поступает двоичный код величины (Пц+2°). Во второй схеме сравнения (88) осуществляется операция Птек.ант.≤(Пц+2°).
В случае выполнения условия Птек.ант.≤(Пц+2°) с выхода второй схемы сравнения (88) управляющий сигнал поступает на первый вход третьего логического элемента "И" (89). При наличии на входах третьего логического элемента "И" (89) сигналов с выходов первой (86) и второй схемы сравнения (88) на выходе третьего логического элемента "И" (89) появляется сигнал, который поступает на вход ждущего мультивибратора (90) и на второй вход седьмого логического элемента (98). Ждущий мультивибратор формирует сигнал заданной длительности и амплитуды для изменения (уменьшения) скорости вращения вала двигателя следящей системы (30), входящей в состав блока имитации текущего положения антенны (2). Одновременно через открытый седьмой логический элемент "И" (98) на вход четвертого входного регистра (99) и далее на первый вход умножителя (100) поступает формуляр данных обнаруженной цели с выхода буферного запоминающего устройства (4). На второй вход умножителя (100) с выхода пятого входного регистра (104), который подключен к шестнадцатому выходу пульта оператора пассивной РЛС (1), поступает константа 
Функционирование тренажера было проверено на испытаниях, проведенных в лабораторных условиях на макете. Предлагаемый тренажер для обучения операторов корабельных ПРЛС по сравнению с известными тренажерами обладает рядом преимуществ:
- по сравнению с тренажером для обучения операторов корабельных ПРЛС (ЯВ1.079.003Т0), предлагаемый тренажер позволяет повысить степень выучки операторов практическим навыкам обнаружения РЛС вероятного противника в условиях ДТР радиоволн с перестраиваемой несущей частотой от импульса к импульсу;
- по сравнению с тренажером для обучения операторов корабельных ПРЛС, предлагаемый тренажер позволяет повысить степень выучки операторов практическим навыкам оптимизации параметров пространственного обзора с целью увеличения вероятности приема излучений РЛС и повышению точности пеленгования носителя РЛС для эффективного применения бортового оружия.
Все это достигается благодаря вновь введенным устройствам, блокам, элементам и связям. Вновь введенные устройства просты, дешевы и технически просто реализуемы на базе известных элементов дискретной и аналоговой техники.
Предлагаемый тренажер предполагается установить в учебном центре ВМФ и использовать в плане подготовки личного состава ВМФ эксплуатации корабельных ПРЛС, которые получили самое широкое распространение в настоящее время.
При использовании предлагаемого тренажера ожидается значительное повышение боевой подготовки личного состава ВМФ за счет обеспечения полноты и точности использования динамических и информационных моделей условий работы корабельных ПРЛС. В конечном итоге все это дает возможность научить операторов более эффективному использованию вверенной им боевой техники за счет ее квалифицированного обслуживания. Испытания макета предлагаемого тренажера подтвердили его высокую эффективность с точки зрения моделирования внешней радиотехнической обстановки, максимально приближенной к реальной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1987 |
|
SU1841002A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |
| ИМИТАТОР СИГНАЛОВ ПАССИВНОГО РАДИОЛОКАТОРА | 1985 |
|
SU1841017A1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2373550C1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА КОНТРОЛЯ РАДИОИЗЛУЧЕНИЙ | 2008 |
|
RU2347233C1 |
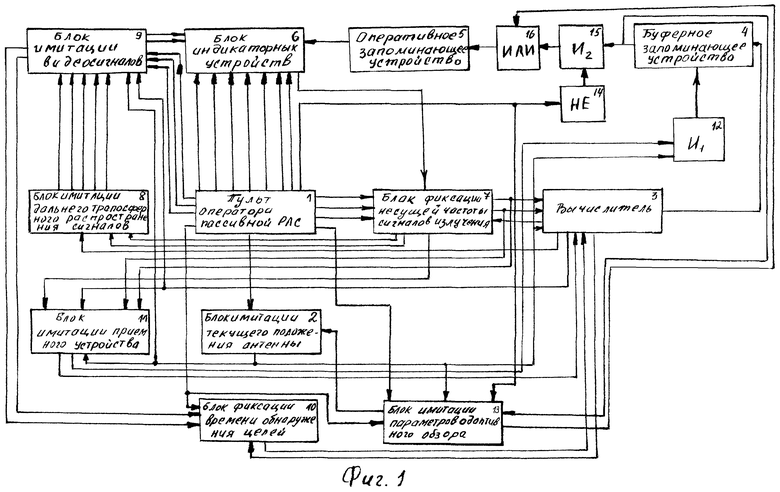
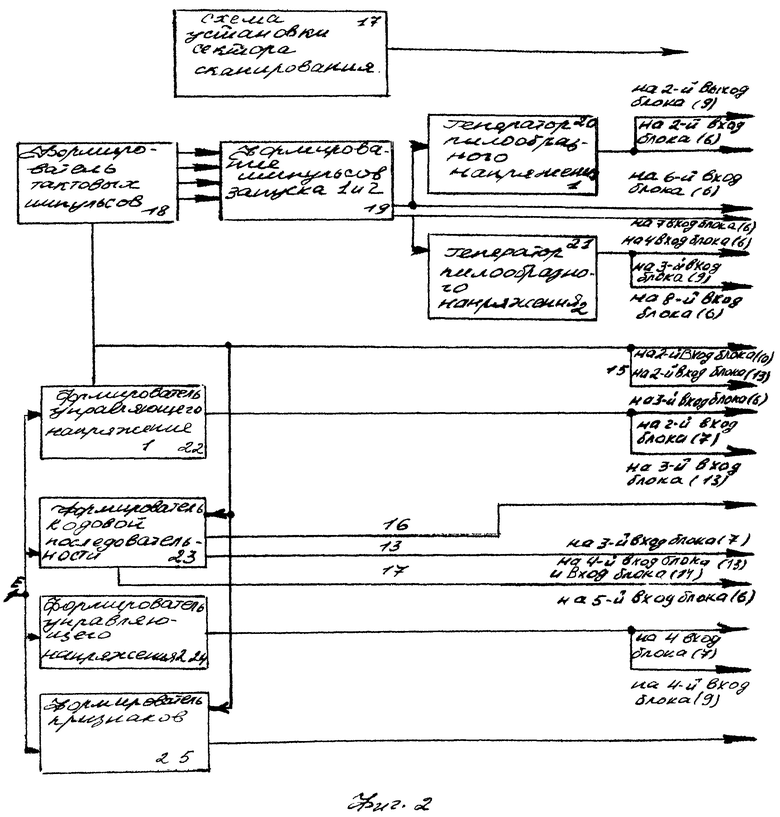
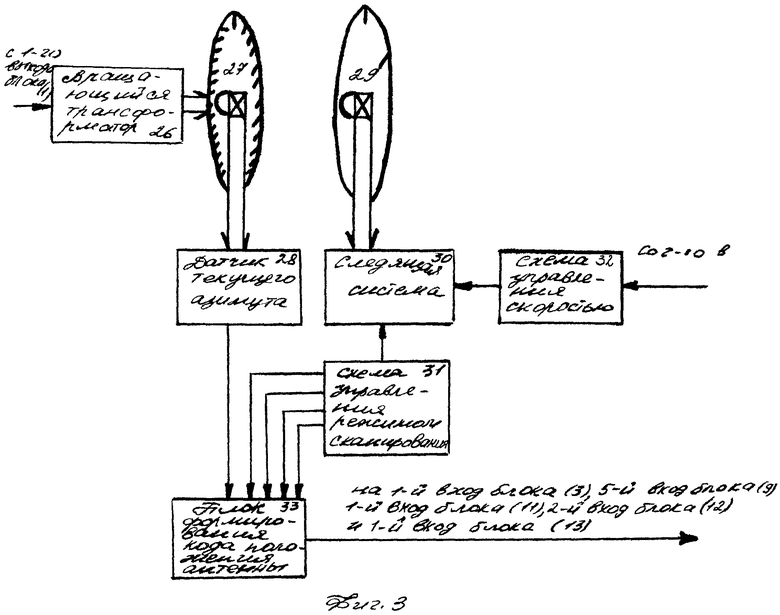
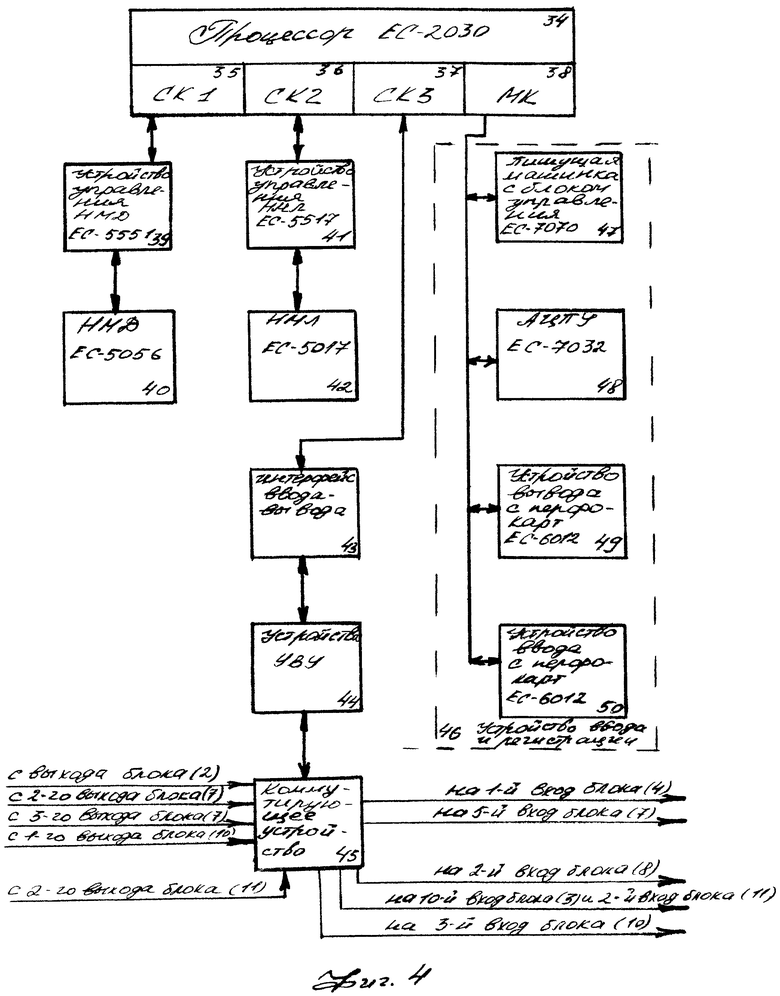
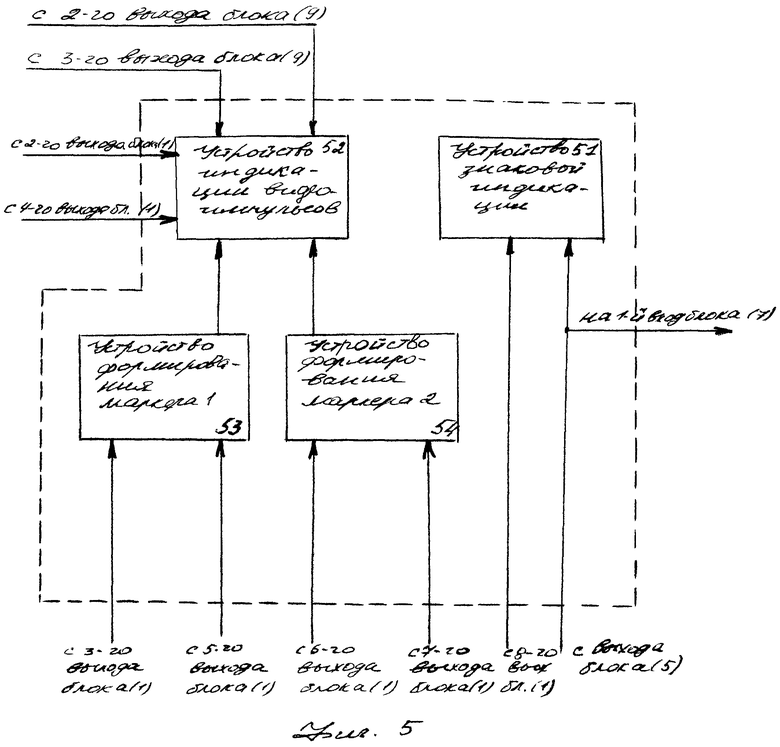

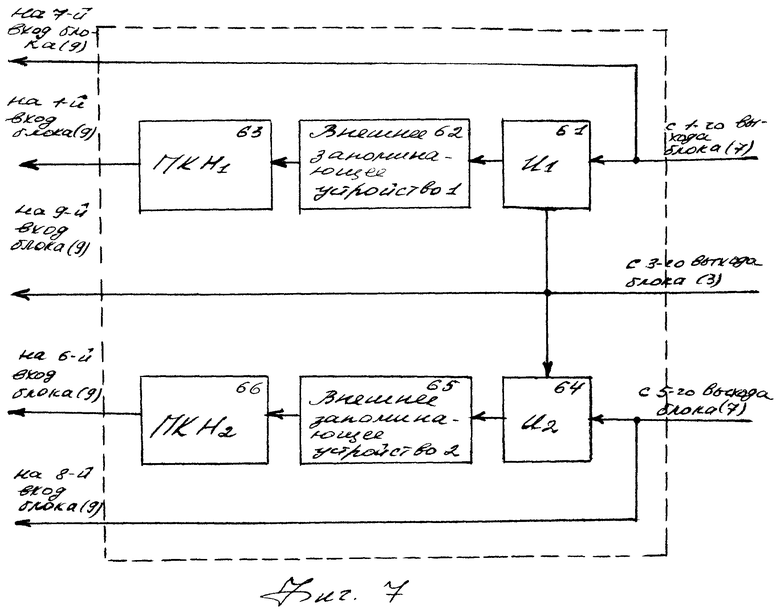
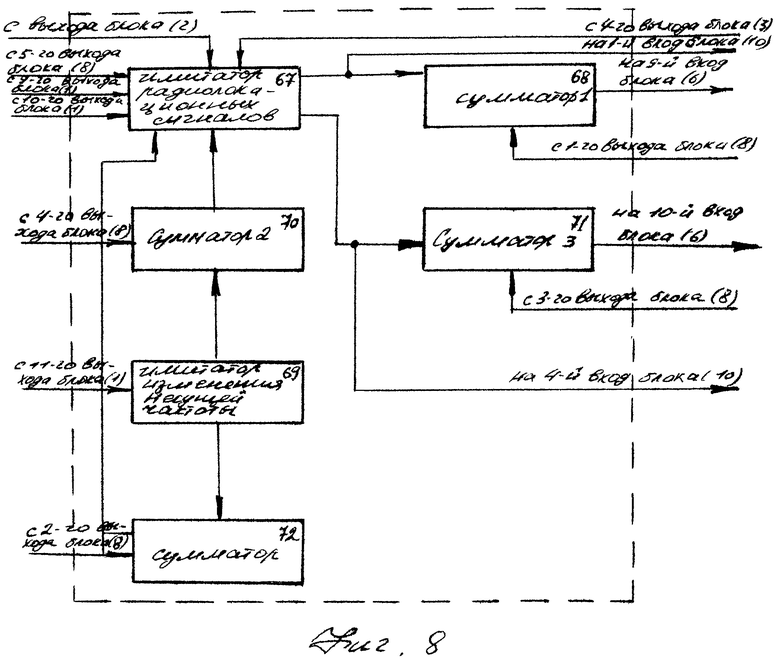
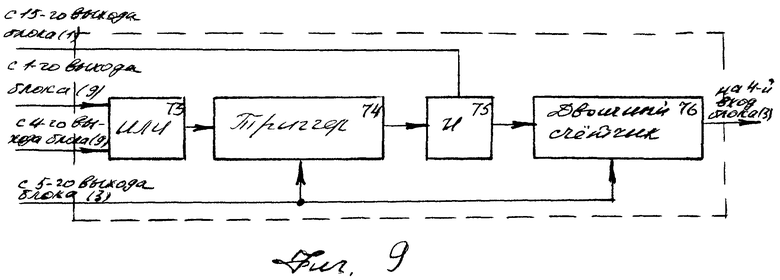
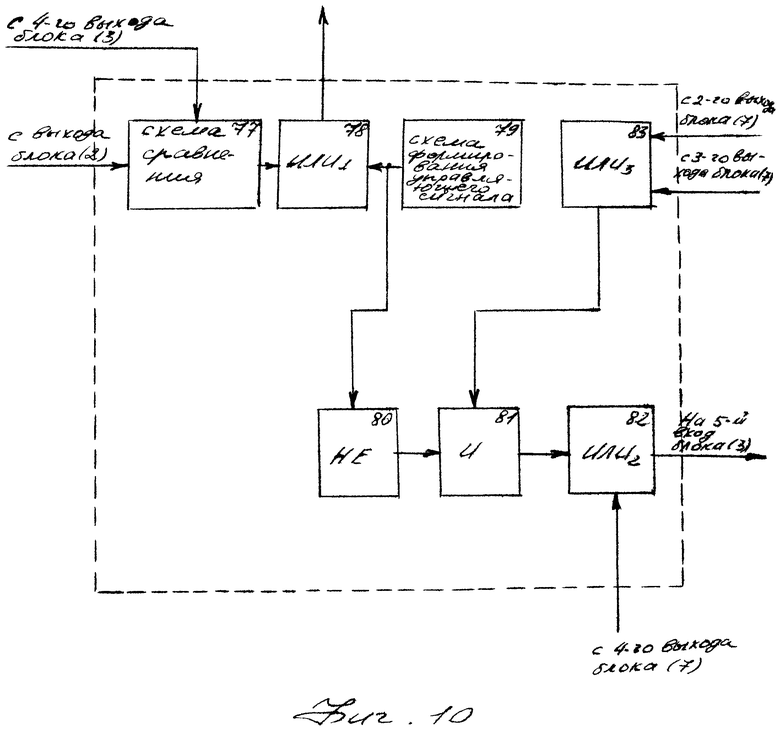

Изобретение относится к учебно-техническим средствам и может быть использовано для подготовки операторов радиолокационных систем (РЛС). Тренажер для обучения операторов корабельных пассивных РЛС содержит пульт оператора пассивной РЛС с пятнадцатью выходами, блок индикаторных устройств с десятью входами и одним объединенным входом с выходом, блок фиксации несущей частоты сигналов излучения с пятью входами и выходами, блок имитации текущего положения антенны с двумя входами и одним выходом, блок фиксации времени обнаружения целей с четырьмя входами и одним выходом, блок имитации приемного устройства с пятью входами и двумя выходами, блок имитации дальнего тропосферного распространения сигналов с тремя входами и пятью выходами, блок имитации видеосигналов с десятью входами и четырьмя выходами, вычислитель с пятью входами и выходами, оперативное запоминающее устройство с одним входом и выходом, буферное запоминающее устройство с двумя входами и одним выходом, блок имитации параметров адаптивного обзора (БИПАО) с пятью входами и двумя выходами, первый элемент «И» с двумя входами и одним выходом, второй элемент «И» с двумя входами и одним выходом, элемент «ИЛИ» с двумя входами и одним выходом, элемент «НЕ» с одним входом и выходом. БИПАО содержит пять входных регистров, регистр констант, два сумматора, умножитель, две схемы сравнения, семь элементов «И», ждущий мультивибратор. Изобретение позволяет максимально приблизить имитационные условия к реальным. 1 з.п. ф-лы, 11 ил.
1. Тренажер для обучения операторов корабельных пассивных радиолокационных систем, содержащий последовательно соединенные пульт оператора пассивной радиолокационной станции, блок имитации текущего положения антенны, вычислитель и буферное запоминающее устройство, последовательно соединенные блок индикаторных устройств, блок фиксации несущей частоты сигналов излучения, блок имитации приемного устройства и первый элемент И, второй вход которого объединен с первым входом вычислителя, а выход соединен со вторым входом буферного запоминающего устройства, последовательно соединенные блок имитации дальнего тропосферного распространения сигналов, блок имитации видеосигналов и блок фиксации времени обнаружения целей, выход которого соединен со вторым входом вычислителя, второй выход которого соединен с первым входом блока имитации дальнего тропосферного распространения сигналов, второй и третий входы которого соединены соответственно со вторым и третьим выходами блока фиксации несущей частоты сигналов излучения, второй, третий, четвертый и пятый входы которого соединены соответственно со вторым, третьим и четвертым выходами пульта оператора пассивной радиолокационной станции и третьим выходом вычислителя, третий и четвертый входы которого объединены со вторым и третьим входами блока имитации приемного устройства и подключены соответственно к четвертому и пятому выходам блока фиксации несущей частоты сигналов излучения, а также оперативное запоминающее устройство и элемент ИЛИ, при этом второй, третий, четвертый и пятый выходы блока имитации дальнего тропосферного распространения сигналов соединены соответственно со вторым, третьим, четвертым и пятым входами блока имитации видеосигналов, шестой, седьмой, восьмой, девятый и десятый входы которого соединены соответственно с выходом блока имитации текущего положения антенны, четвертым выходом вычислителя, пятым, шестым и седьмым выходами пульта оператора пассивной радиолокационной станции, восьмой, девятый, …, четырнадцатый выходы которого соединены соответственно с первым, вторым, …, седьмым входами блока индикаторных устройств, восьмой и десятый входы которого соединены соответственно со вторым и третьим выходами блока имитации видеосигналов, четвертый выход которого соединен со вторым входом блока фиксации времени обнаружения целей, третий и четвертый входы которого соединены соответственно с пятнадцатым выходом пульта оператора пассивной радиолокационной станции и пятым выходом вычислителя, пятый вход которого соединен со вторым выходом блока имитации приемного устройства, четвертый и пятый входы которого соединены соответственно с четвертым выходом вычислителя и выходом блока имитации текущего положения антенны, отличающийся тем, что, с целью повышения уровня профессиональной подготовки операторов управлению пассивной радиолокационной станции в сложной радиотехнической обстановке при дальнем тропосферном распространении радиоволн на максимальных дальностях от корабельных радиолокационных станций путем оптимизации параметров пространственного поиска пеленгационной антенной, в него введены блок имитации параметров адаптивного обзора, второй элемент И и элемент НЕ, вход которого объединен с первым входом блока имитации параметров адаптивного обзора и подключен к шестнадцатому выходу пульта оператора пассивной радиолокационной станции, семнадцатый выход которого соединен со вторым входом блока имитации параметров адаптивного обзора, третий вход которого объединен с третьим входом блока фиксации времени обнаружения целей, четвертый вход подключен к выходу блока имитации текущего положения антенны, а пятый объединен с первым входом второго элемента И и подключен к выходу буферного запоминающего устройства, причем выход элемента НЕ через второй элемент И подключен к первому входу элемента ИЛИ, выход которого через оперативное запоминающее устройство подключен к десятому входу блока индикаторных устройств, а второй вход подключен к первому выходу блока имитации параметров адаптивного обзора, второй вход которого соединен со вторым входом блока имитации текущего положения антенны.
2. Тренажер по п. 1, отличающийся тем, что блок имитации параметров адаптивного обзора выполнен в виде последовательно соединенных первого элемента И, первого входного регистра, первой схемы сравнения, второго элемента И, второй схемы сравнения, третьего элемента И, второй вход которого соединен с выходом первой схемы сравнения, и ждущего мультивибратора, последовательно соединенных четвертого элемента И, второго входного регистра, третьей схемы сравнения, пятого элемента И и первого сумматора, выход которого соединен со вторым входом первой схемы сравнения, последовательно соединенных регистра констант и второго сумматора, второй вход которого соединен с выходом пятого элемента И, а выход - со вторым входом второй схемы сравнения, последовательно соединенных шестого элемента И, второй вход которого является третьим входом блока, и третьего входного регистра, выход которого соединен со вторым входом третьей схемы сравнения, последовательно соединенных седьмого элемента И, первый вход которого соединен с выходом третьего элемента И, четвертого входного регистра, умножителя, второй вход которого соединен с пятым входным регистром, и выходного регистра, выход которого является первым выходом блока, причем первые входы первого, четвертого и шестого элементов И являются вторым входом блока, первым входом которого является вход пятого входного регистра, четвертым входом блока являются вторые входы первого и второго элементов И, а вторые входы четвертого, пятого и седьмого элементов И являются пятым входом блока, вторым выходом которого является выход ждущего мультивибратора.
| Авт | |||
| свид | |||
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

