Фиг ;
Изобретение относится к машиностроению и может быть использовано преимущественно в кузнечно-прессовом оборудовании.
Известен привод пресса, содержащий эксцентриковый вал, связанный с ползуном через промежуточное звено в виде эксцентриков шайбы, размещенное внутри ползуна.
Основными недостатками такого привода являются : г-1 значительный эксцентриситет передаваемой нагрузки, изменяющийся во времени за каждый оборот эксцентрикового вала. что отрицательно сказывается на работе направляющих и общей динамике пресса;
трение скольжения передающих нагрузку поверхностей эксцентрика и промежуточного звена Соответственно этому - пониженный к п.д привода и повышенный износ трущихся поверхностей;
наличие мертвых зон механизма, которые преодолеваются только за счет инерционных сил движущихся масс.
Известен также привод пресса, содержащий эксцентриковый вал, сопряженный с поверхностью отверстия в ползуне и промежуточное звено, размещенное в зазоре между эксцентриком и поверхностью отверстия. Промежуточное звено выполнено в виде цилиндрического кругового сегмента или в виде кругового цилиндра с дополнительными промежуточными звеньями в виде круговых цилиндров, размещенных по обе стороны от основного промежуточного звена.
Основным недостатком такого привода является значительный эксцентриситет передаваемой нагрузки, изменяющийся во времени за каждый оборот эксцентрикового вала, что отрицательно сказывается на работе направляющих и общей динамике пресса.
Известен также привод пресса, содержащий коленчатый вал с двумя кулачками, расположенными с боков колена, связанный с ползуном через промежуточные звенья в виде двух цилиндрических роликов, размещенных по разные стороны оси вращения кулачков 3
Основными недостатками такого привода являются:
значительный эксцентриситет передаваемой нагрузки, изменяющийся во времени за каждый оборот коленчатого вала, что отрицательно сказывается на работе направляющих и общей динамике пресса.
невозможность обеспечения стабилизации направления усилий, передаваемых кулачками ползуну
Целью изобретения является повышение надежности пресса путем стабилизации направления и устранения эксцентриситета, передаваемой от привода на ползун рабочей нагрузки.
Это достигается тем, что в приводе пресса, содержащем кулачковый вал, связанный с ползуном через промежуточные звенья в виде роликов (круговых цилиндров), расположенных в ползуне, кулачек вала выполнен с эвольвентным профилем, с возможностью обкатывания его по промежуточным звеньям, а направляющие расположены симметрично действующей на
ползун рабочей нагрузки.
На фиг 1 изображен привод в положении окончания рабочего хода - начале холостого хода ползуна. Привод содержит вал 1 с эвольвентным кулачком 2, ползун 3, ролики рабочего и холостого хода 4 и 5, опоры роликов рабочего и холостого хода 6 и 7, направляющие 8 и станину 9.
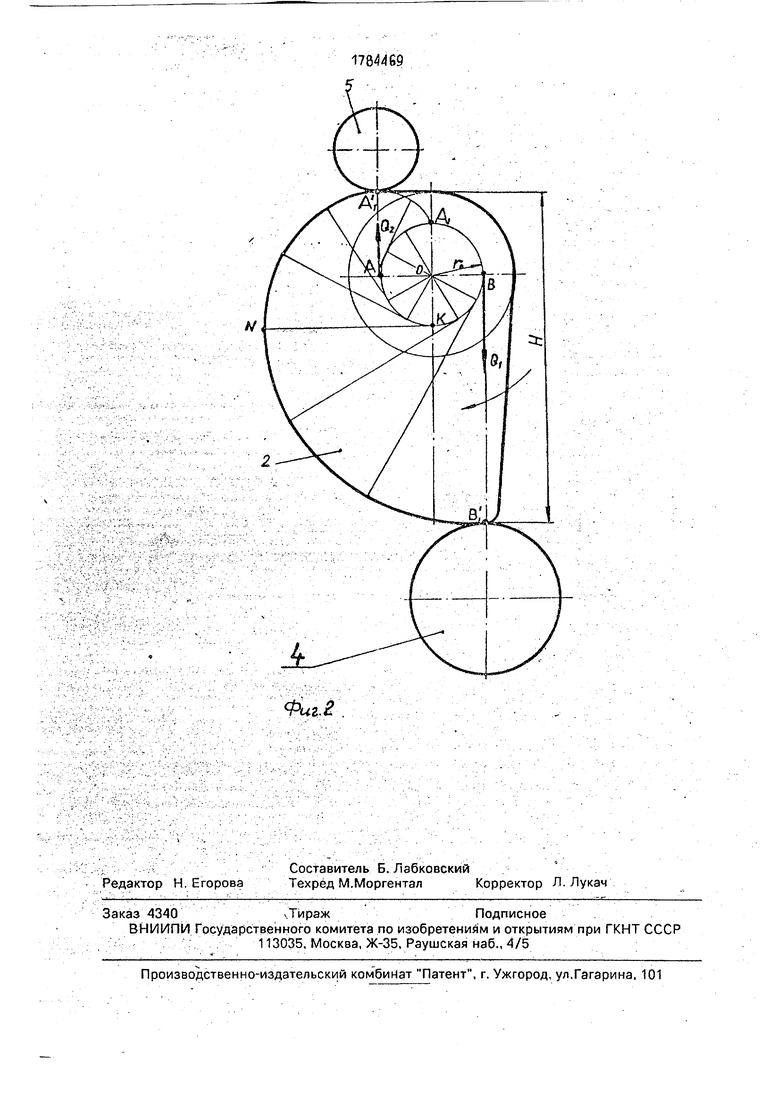
На фиг. 2 показана совмещенная схема построения эвольвентного профиля кулачка
2 и усилий QI и Оа, действующие на ролики 4 и 5 при рабочем и холостом ходе ползуна 3.
Привод работает следующим образом: При вращении вала 1 жестко связанный
с Ним кулачек 2 обкатывается своим эвольвентным профилем по ролику 4, отжимая его и соответственно через опоры б, передавая усилия на ползун 3, перемещает его по направляющим 8.
Так совершается рабочий ход ползуна 3. В конце этого периода, заканчивая обкатку по ролику 4 в точке Bi (фиг. 2), кулачек 2 входит в контакт с роликом 5 в точке AI , соответствующей началу рабочего участка
эвольвентного профиля кулачка 2. При дальнейшем вращении вала 1 кулачок 2 обкатывается уже своим эвольвентным профилем по ролику 5, отжимая его по направляющим 8 в обратном направлении. Так совершается
холостой ход ползуна 3.
Расстояние Н контактирующими поверхностями качения роликоб 4 и 5 должно быть равно сумме наибольших радиальных размеров кулачка 2 (чтобы он не
заклинивался между роликами 4 и 5). Для варианта, показанного на фиг. 2, указанное расстояние определяется как сумма радиусов кривизн в начале и в конце эвольвентного профиля кулачка 2, т.е.
H AAi +BBN ,
гдеАА 1 -АА1 4
. П Г о
J -2
BBi BAi
Подставив значения AAi и BBi получим
Н AAi + BBi 2 п г0,
Определившееся, таким образом, положение начальной AI и конечной Bi точек рабочего участка эвольвентного профиля кулачка 2 однозначно определяет и его размер, который, как видно на фиг. 2, всегда соответствует 180° развертки основного цилиндра радиуса г0.
Таким образом, обеспечивается непрерывность возвратно-поступательного движения ползуна 3, направление действующих на него нагрузок рабочего и холостого хода остается неизменным.
При смещении рабочего участка эвольвентного профиля кулачка 2 в направлении, например, точки AI (сохраняя соответствие его 180° развертке основного цилиндра) расстояние Н и, следовательно, размер отверстия в ползуне 3 уменьшается и наоборот.
Эта задача не является принципиальной и решается главным образом в зависимости от требуемой прочности вала 1.
Согласно схеме на фиг. 2 ход ползуна 3, соответствующий полуобороту кулачка 2
Го,
h BBi-AAi 3-2 - -2
При заданном ходе h радиус основного
цилиндра
--Ј
Так как в описанном приводе эксцентриситет нагрузки на ползун при его рабочем ходе Эр 0, то при холостом ходе он будет Эх 2 г0, как это и показано на фиг. 1. 5В общем случае указанный эксцентриситет определяется в пределах
О Эр
п
10
п
Эх 2 г0.
Формула изобретения Привод механического пресса, содержащий кулачковый вал, связанный с размещенным в направляющих станины ползуном через промежуточные звенья в виде Закрепленных в ползуне с возможностью обкатывания кулачка двух цилиндрических роликов, первый из которых расположен со
стороны рабочего торца ползуна на равном расстоянии от направляющих, а второй - со стороны нерабочего торца ползуна со смещением относительно плоскости, перпендикулярной плоскости поворота кулачка и
проходящей через ось поворота последнего, отличающийся тем, что, с целью повышения надежности, рабочий профиль кулачка выполнен эвольвентным, соответствующим 180° развертки основного цилиндрз. первый ролик расположен со смещением от упомянутой плоскости в противоположную относительно Второго ролика сторону, а величина смещения каждого ролика равна г0, где г0 - радиус основного
цилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипный пресс | 1990 |
|
SU1776236A3 |
| ОДНОКРИВОШИПНЫЙ ПРЕСС ДВОЙНОГО ДЕЙСТВИЯ | 2006 |
|
RU2327571C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2021 |
|
RU2778194C1 |
| Привод механического пресса | 1975 |
|
SU517510A1 |
| КРИВОШИПНЫЙ ПРЕСС | 1992 |
|
RU2028944C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2022 |
|
RU2786863C1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1971 |
|
SU301285A1 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2005 |
|
RU2298680C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2023 |
|
RU2795867C1 |
| МЕХАНИЗМ ПЕРЕМЕННОЙ СТРУКТУРЫ С КОМБИНИРОВАННЫМ ШАТУНОМ МЕХАНИЧЕСКОГО ПРЕССА | 2002 |
|
RU2219059C2 |
Использование: в машиностроении, в частности в кузнечно-прессовом оборудовании. Сущность изобретения: привод содержит вал 1 с эвольвентным кулачком 2, взаимодействующим с ползуном 3 через промежуточные звенья в виде ролика 4 рабочего хода ползуна и ролика 5 холостого хода ползуна. При вращении вала 1 кулачок 2 обкатывается своим эвольвентным профилем попеременно по роликам 4 и 5 и, передавая усилия ползуну 3, перемещает его по направляющим 8 для совершения рабочего и холостого хода. 2 ил.
Фиг. 2
| Залесский В.И | |||
| Оборудование кузнеч- но-прессовых цехов | |||
| М : Высшая школа, 1964,с.542,543, рис | |||
| ЦЕПНАЯ ВРУБОВАЯ МАШИНА | 1924 |
|
SU3256A1 |
