Изобретение относится к строительству и может быть использовано для погружения в грунт длинномерных строительных конструкций, например свай при возведении свайных фундаментов.
Известно устройство для погружения в грунт строительных элементов, включающее базовую машину с опорной рамой, установленный на раме погружающий орган в виде пушки со снарядом-носителем и тро- соблочный привод для извлечения снаряда- носителя.
Использование в известном устройстве заряда взрывчатого вещества из условия техники безопасности ограничивает область его применения о определяет низкий КПД. Кроме того, известное устройство может быть использовано для погружения свай с небольшой массой и габаритными
размерами вследствие значительной отдачи при каждом выстреле.
Известно устройство для погружения в грунт длинномерных строительных конструкций, включающее базовую машину с рамой и мачтой, ударную часть, трособлочный привод подъема ударной части в виде лебедки, троса, отводного блока и захвата и скрепленные через мачту с рамой направляющие.
Погружение в известном устройстве свай ударной (динамической) нагрузкой, вследствие низкого КПД (за счет значительных затрат энергии при каждом ударе на преодоление сил трения покоя, на пластические деформации оголовка сваи и подскок ударной части) обуславливает высокие энергозатраты на погружение. Низкий КПД и незначительная энергия одного удара определяют, кроме того, необходимость в
Х|
большом количестве ударов для погружения одной сваи, т.е. большую продолжительность погружения сваи в грунт. Динамическое воздействие на сваю вызывает возникновение в последней высоких напря- жений, часто приводящих к разрушению сваи еще до погружения ее на проектную отметку. Для предотвращения преждевременного разрушения сваи изготавливают с повышенной,по сравнению с несущей спо- собностью по грунту основания прочно- пр ййбдйг перерасходу цемента и арматур ы, т.е. определяет высокую материалоемкость возводимых свайных фундаментов. Кроме того известное устройство характеризуется передачей на землю значительных нагрузок, обуславливая необходимость в предварительной планировке строительной площадки и невозможность использования на заболоченных участках строительства, т.е. ограничение области применения устройства. Из-за крепления направляющих к опорной раме через мачту, особенно при большой длине свай, известное устройство обладает также значитель- ной материалоемкостью.
Наиболее близким известным техническим решением к предлагаемому, выбранным в качестве прототипа, является устройство для погружения в грунт длинно- мерных строительных элементов, содержащее базовую машину с рамой, летательный аппарат и направляющие в виде гибки тяг, натянутых между рамой базовой машины и летательным аппаратам.
В известном техническом решении после отсоединения от летательного аппарата сбрасываемых строительных элементов могут возникнуть отклонения последних в процессе падения от вертикальной оси, например, из-за ветрового воздействия как на направляющие канаты, так и на сами сбрасываемые строительные элементы. В результате в момент погружения в грунт возникает действующая на погружаемый элемент пара, сил, стремящаяся повернуть его в вертикальной плоскости, что приводит к не до погружению и даже поломке погружаемого элемента (сваи), а в конечном итоге определяет снижение эффективности по- гружения. Кроме того в известном техническом решении каждый цикл погружения сопровождается отсоединением направляющих от рамы базовой машины, перемеще- нием летательного аппарата к месту складирования, погружаемых строительных элементов и обратной последовательностью операций, что существенно увеличивает время цикла и приводит к снижению производительности устройства
Целью изобретения является повышение эффективности погружения и производительности устройства.
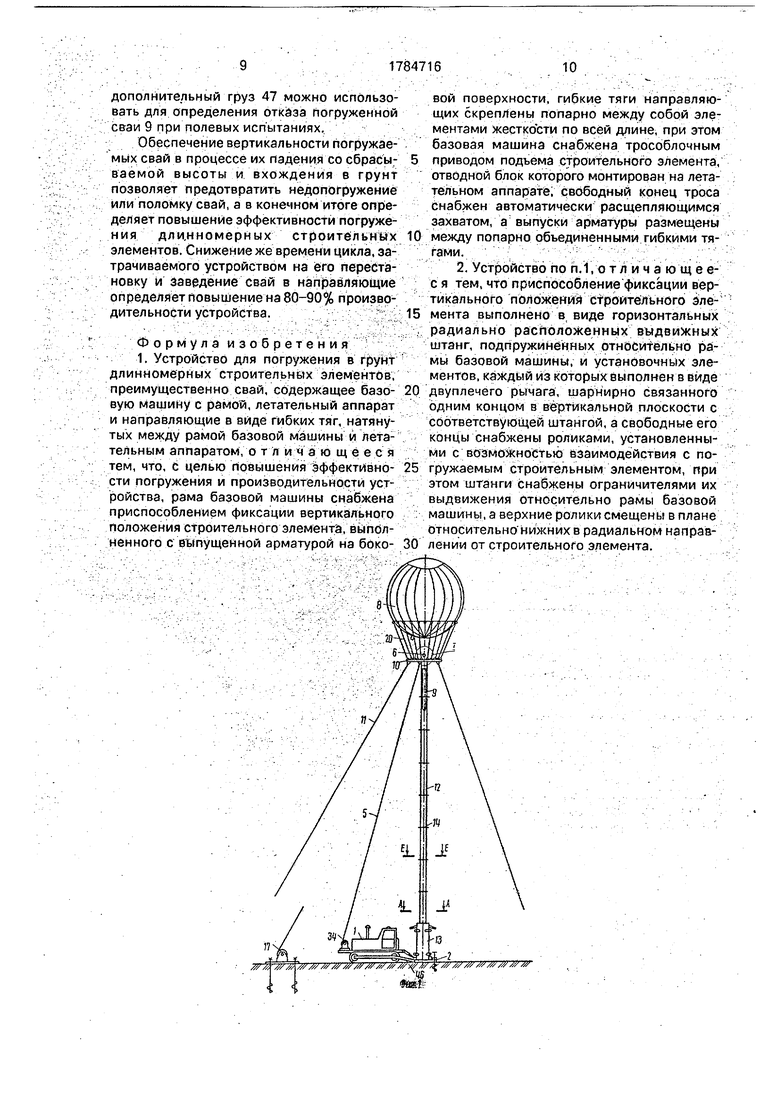
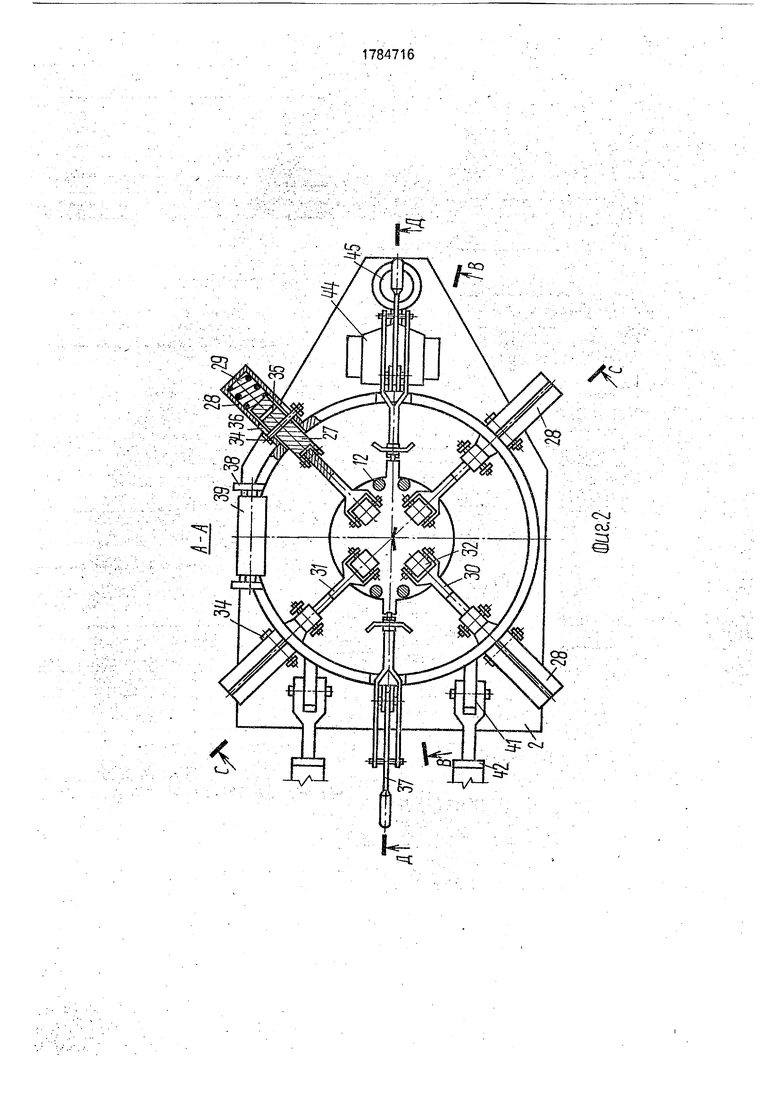
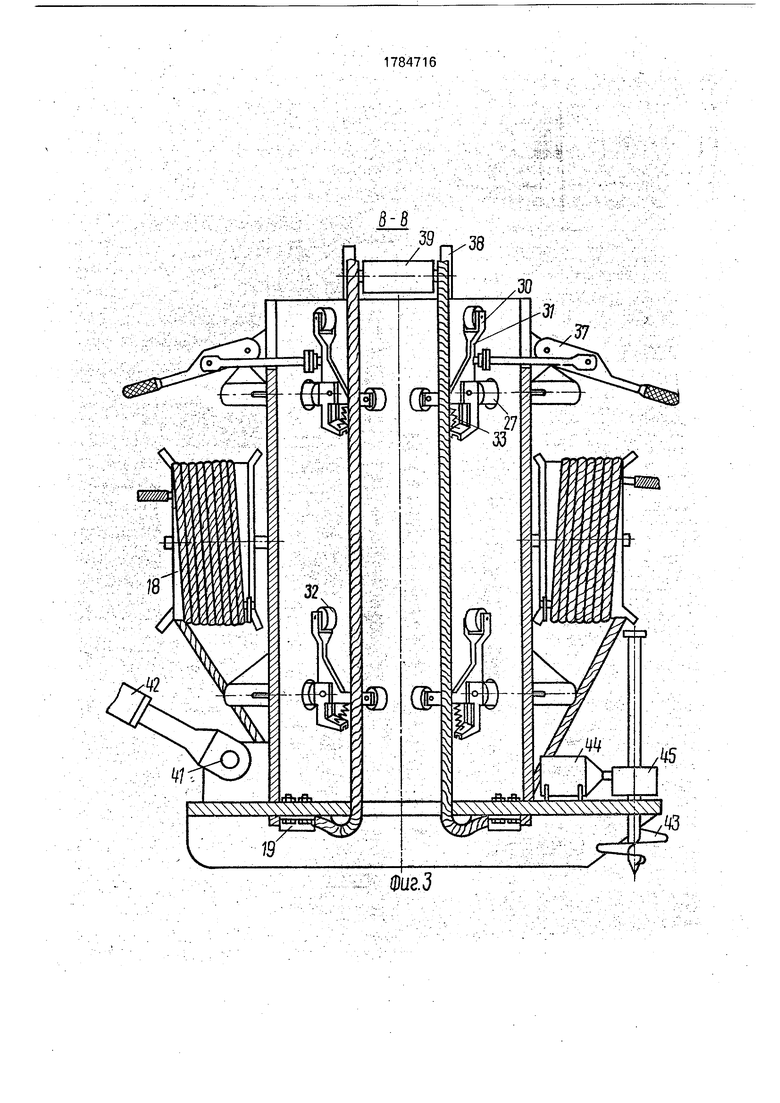
На фиг.1 изображен общий вид устройства для погружения в грунт длинномерных строительных элементов, например свай, в процессе подъема сваи для погружения; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез В-В на фиг.2; на фиг.4 - разрез С-С на фиг.2 в момент входа погружаемой сваи в приспособление для фиксации вертикального положения сваи; на фиг.5 - разрез на фиг.2 в момент заведения сваи в направляющие; на фиг.6-сечение Е-Е на фиг.1; на фиг.7 - узел I на фиг.1; на фиг.8 - автоматический расцепляющийся захват, общий вид; на фиг.9 - дополнительный падающий груз, общий вид.
Устройство для погружения в грунт длинномерных строительных элементов, например свай, состоит из базовой машины 1 с опорной рамой 2 и трособлочным приводом 3 подъема сваи в виде лебедки 4, троса 5, отводного блока 6 и автоматически расцепляющегося захвата 7, летательного аппарата в виде аэростата 8 с подвесной рамой 10, укрепленного на расчалках 11 с возможностью горизонтального и вертикального перемещения. Между опорной 1 и подвесной 10 рамами натянуты направляющие, выполненные из четырех гибких тяг 12. Рама 2 оборудована приспособлением 13 для фиксации вертикального уположения сваи 9. Гибкие тяги 12 скреплены попарно между собой по высоте элементами жесткости 14, которые закреплены болтами 15 посредством гибких пластин 16 на направляющих. Лебедка 4 трособлочного привода 3 может быть установлена на базовой машине 1 или непосредственно на отдельно выполненной площадке (на чертежах не показано). Горизонтальное и вертикальное перемещение аэростата 8 над территорией площадки обеспечивается путем изменения длины расчалок 11, например с помощью закрепленных на площадке в грунте концевых лебедок 17. Для обеспечения перемещения аэростата 8 над всем свайным полем необходимо не менее трех расчалок 11, а концевые лебедки 17 должны быть расположены за пределами свайного поля. Изменение длины гибких тяг 12 производят наматыванием их на бухты 18 (сматыванием с бухт 18) после ослабления крепления 19 к раме 2 болтами. На подвесной раме 10, связанной с аэростатом 8 винтами 20, монтирован отводной блок 6, через который переброшен пропущенный через отверстие 21 трос 5 трособлочного привода 3. Размер отверстия 21 определяется из условия исключения касания тросом 5 его краев при раскачивании аэростата 8 под действием ветра. Свободный конец трособлочного привода 3 пропущен между гибкими тягами 12 и оборудован автоматически расцепляющимся захватом 7, Захват 7 состоит из двух шарнирно соединенных щек 22, страховочной петли 23 и фиксатора 24, выполненного в виде рычага, укрепленного шарнирно на одной из щек 22 и пре- пятствующег о их перемещению под действием пружины 25, причем свободное плечо рычага выполнено с роликом 26. Изменение грузоподъемной силы аэростата 8 достигается известными путями (балластировкой, выполнением аэростата с двумя емкостями и т.д.).
Приспособление 13 для фиксации вертикального положения сваи 9 выполнено в виде горизонтальных радиально расположенных выдвижных штанг 27, подпружиненных относительно рамы 2 в трубчатых направляющих 28 пружинами 29, и установочных элементов 30. Каждый установочный элемент 30 изготовлен в виде двуплечего рычага 31, шарнирно связанного одним концом в вертикальной плоскости с соответствующей штангой 27.
Наиболее рационально для обеспечения равнопрочности располагать точку крепления в центре двуплечего рычага 31. Свободные концы рычага 31, взаимодействующие со сваей 9, оборудованы роликами 32, установленными с возможностью взаимодействия со сваей 9. Рычаги 31 удерживаются пружинами 33 в верхнем положении, в котором верхние ролики 32 смещены в пла не относительно нижних в радиальном на- правлении наружу, что позволяет предотвратить поломку установочных элементов 30 при входе сваи 9 в приспособле- ние 13. Штанги 27 расположены в приспособлении 13 ярусами, в каждом из которых не менее трех пар роликов 32 для круглых и четырех пар - для квадратных свай 9. Штанги 27 снабжены ограничителями 34 их выдвижения, пропущенными через отверстия 35 в штанге 27 и продольные отверстия 36 в направляющих 28. Штанга 27 может иметь несколько отверстий 35, и в зависимости от того, какое у ких использовано для ограничителя 34, меняется ее вылет, чем достигается регулировка приспособления в зависимости от размера поперечного сечения сваи 9. На боковой поверхности рамы 2 укреплены оттягивающие рычаги 37 для разведения тяг 12 перед заведением сваи 9 в направляющие Для исключения повреждения сваи 9 и направленного поступления ее при заведении в
направляющие в верхней части опорной рамы 2 предусмотрены упоры 38с валиком 39. Опорная рама 2 передней частью крепится через форкоп 40 к базовой машине 1 и соединена посредством шарниров 41 с ее гидроцилиндрами 42. Хвостовая часть опорной рамы 2 в случае необходимости может быть оборудована винтовым анкером 43, который погружается в грунт двигателем 44 через
0 редуктор 45. Свая 9, для обеспечения возможности перемещения по направляющим 12, выполнена с выпущенной арматурой 46. На боковой поверхности для повышения эффективности погружения свай 9 в грунт пре5 дусмотреноиспользование
дополнительного падающего груза 47, который соединяют со сваей 9 через строповоч- ную петлю 48, заведенную в углубление 49 груза 47, посредством вставляемого в от0 верстие 50 стержня, концы которого одновременно служат направляющей арматурой 46 для перемещения сваи 9 в гибких тягах 12.
Устройство для погружения в грунт
5 длинномерных строительных элементов работает следующим образом.
На строительной площадке подготавливают к работе аэростат 8 с подвесной рамой 10, предварительно заанкерив концевые ле0 бедки 17 расчалок 11 в грунте. К подвесной раме 10 крепят свободные концы гибких тяг 12 и перебрасывают через блок 6 трос 5, заводя его в отверстие 21. После этого поднимают аэростат 8 над территорией строи5 тельной площадки, стравливая с лебедок 17 тросы расчалок 11 и сматывая тяги 12 с бухт 18. Высота подъема аэростата 8 определяется в зависимости от прочностных характеристик грунта основания исходя из условия
0 достаточности ее для погружения сваи 9 на проектную отметку за один прием. После подъема аэростата на расчетную высоту закрепляют гибкие тяги 12 в опорной раме 2 креплением 19 и базовая машина 1 с рамой
5 2 перемещается к месту погружения сваи 9. Гидроцилиндрами 42 и анкером 43 опорную раму 2 устанавливают в рабочее положение. При этом центр пространства, ограниченного тягами 12, наводят на отмеченную на пло0 щадке точку погружения сваи, а ось приспособления 13 устанавливают в вертикальное положение. Далее цэпляют захватом 7 сваю 9 на петлю 48, поднимают ее трособлочным приводом 4 и, раздвинув тяги
5 12 при помощи оттягивающих рычагов 37, заводят сваю 9 в направляющие, как показано на фиг.5. При этом свая 9 перемещается без трения боковой поверхностью на валике 38, а упоры 39 удерживают ее в заданном направлении. Заведенная в направляющие свая находится при этом между парами гибких тяг 12, а концы арматуры 46 располагаются в зазорах между тягами 12 каждой из пар, как показано на фиг.6. Затем производят натяжение гибких тяг 12 путем частичного стравливания тросов расчалок 11 с концевых лебедок 17 и передачи части усилия натяжения с расчалок 11 на направляющие, благодаря чему убирается слабина тяг 12, возникновение которой возможно в процессе перемещения базовой машины 1 и аэростата 8. После этого сваю 9 поднимают трособлочным механизмом 4 до подвесной рамы 10. В момент контакта захвата 7 роликом 26 подвесной рамы фиксатор 24 освобождает щеки 22, которые под действием пружины 25 раскрываются, и происходит расстроповка поднимаемой сваи 9. Под действием силы тяжести свая 9 свободно падает в направляющих и входит в приспособление 13 для фиксации вертикального положения, где ликвидируются возникающие в процессе падения незначительные отклонения оси сваи 9 от вертикали. В приспособлении 13 падающая свая 9 Отклоняет по направлению движения установочные элементы 30, преодолевая сопротивления пружин 33. В результате оба конца двуплечих рычагов 31 установочныхҐлемен- тов 30, оборудованные, роликами 32, устанавливаются на одной линии - образующей ствола сваи 9, как показано на фиг.4. Действие приспособления 13 основано на том, что максимальное расстояние Ь между парами радиально расположенных роликов 32 достигается в вертикальном положении линий, соединяющих центры пары роликов 32, принадлежащей одному двуплечему рычагу
31.Перед началом работы выдвижные штанги 27 устанавливают с таким вылетом, при котором максимальное расстояние Ь между парами радиально расположенных роликов 32 равно диаметру погружаемой сваи 9. Свая 9 с отклоненной от вертикали центральной осью, попадая в приспособление 13, ориентирует пары радиально расположенных роликов 32- по своим образующим. При этом расстояние Ь между парами роликов 32 меньше диаметра сваи 9, что не позволяет последней пройти приспособление 13 без изменения положения продольной оси под действием установочных элементов 30 посредством роликов
32.Вертикально падающие сваи 9 с незначительным отклонением продольной оси от вертикали при прохождении приспособления 13 практически не испытывают сопротивления в силу отсутствия трения между установочными элементами 30 за счет оборудования концов двуплечих рычагов 31 роликами 32 и незначительной инерции по- . следних. При больших отклонениях оси сваи 9 от вертикали в элементах приспособления 13 возникают значительные усилия, с целью
уменьшения которых выдвижные штанги 27 подпружинены относительно опорной рамы 2 в направляющих 28 пружинами 29. Изменение вылета штанг 27 осуществляют путем перестановки ограничителя 34 в отверстиях
0 35. Для сохранения при этом жесткости пружин 29 в торцах направляющих 28 под пружины 29 подкладывают вкладыши (на чертежах не показано). Штанги 27 с установочными элементами 30 располагают в при5 способлении 13 в несколько ярусов, благодаря чему достигается точность фиксации вертикального положения оси сваи 9, что существенно влияет на эффективность ее погружения в грунт, т.к. при незначитель0 ном отклонении от вертикали оси падающей сваи 9 в момент контакта с поверхностью грунта ее центр тяжести смещается относительно точки контакта и образуется пара сил, приводящая к повороту сваи в верти5 кальной плоскости. При этом свая 9 совершает поступательно-вращательной движение, которое вызывает значительное сопротивление погружению со стороны грунта, а на практике выражается, как пока0 зывают опыты, в недопогружении, значительном отклонении от вертикали погруженной сваи 9 или поломке ее ствбла. Таким образом, пройдя приспособление 13 ось сваи 9 приобретает вертикальное поло5 жение и свая погружается в грунт, используя накопленную за время падения кинетическую энергию на преодоление сопротивления грунта. После чего производят извлечение из грунта анкера 43 и перемеще0 ние базовой машины 1 к месту забивки очередной сваи и повторяется новый цикл работы устройства. В случае недопогруже- ния сваи 9 до проектной отметки производят ее добивку, для чего используют
5 дополнительный груз 47, который как и сваю заводят в направляющие 12 и сбрасывают с V определенной высоты (1-3 м). При этом рас- строповку захвата 7 можно осуществлять вручную прикрепленным к фиксатору 24 ка0 натом (на чертежах не показано). Дополнительный груз 47 используют также при погружении свай 9, обладающих малой собственной массой, недостаточной для приобретения в результате падения энергии,
5 необходимой для погружения сваи в грунт на проектную отметку. В этом случае дополнительный груз 47 предварительно соединяют со сваей 9 стержнем, вставленным в отверстие 50 через строповочную петлю 48, заведенную в углубление 49. Кроме того,
дополнительный груз 47 можно использовать для определения отказа погруженной сваи 9 при полевых испытаниях.
Обеспечение вертикальности погружаемых свай в процессе их падения со сбрасываемой высоты и вхождения в грунт позволяет предотвратить недопогружение или поломку свай, а в конечном итоге опре деляет повышение эффективности погруже- ния длинномерных строительных элементов. Снижение же времени цикла, затрачиваемого устройством на его перестановку и заведение свай в направляющие определяет повышение на 80-90% производительности устройства.
Формула изобретения 1. Устройство для погружения в грунт длинномерных строительных элементов, преимущественно свай, содержащее базовую машину с рамой, летательный аппарат и направляющие в виде гибких тяг, натянутых между рамой базовой машины и летательным аппаратом, отличающееся тем, что, с целью повышения эффективности погружения и производительности устройства, рама базовой машины снабжена приспособлением фиксации вертикального положения строительного элемента, выполненного с выпущенной арматурой на боковой поверхности, гибкие тяги направляющих скреплены попарно между собой элементами жесткости по всей длине, при этом базовая машина снабжена трособлочным приводом подъема строительного элемента, отводной блок которого монтирован на летательном аппарате, свободный конец троса снабжен автоматически расщепляющимся захватом, а выпуски арматуры размещены
между попарно объединенными гибкими тягами.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что приспособление фиксации вертикального положения строительного элемента выполнено в виде горизонтальных рздиально расположенных выдвижных штанг, подпружиненных относительно рамы базовой машины, и установочных элементов, каждый из которых выполнен в виде
двуплечего рычага, шарнирно связанного одним концом в вертикальной плоскости с соответствующей штангой, а свободные его концы снабжены роликами, установленными с возможностью взаимодействия с погружаемым строительным элементом, при этом штанги снабжены ограничителями их выдвижения относительно рамы базовой машины, а верхние ролики смещены в плане относительно нижних в радиальном направлении от строительного элемента.

| название | год | авторы | номер документа |
|---|---|---|---|
| МОЛОТ ДЛЯ ПОГРУЖЕНИЯ В ГРУНТ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2002 |
|
RU2209877C1 |
| ВЕСТАПЛАН-ВЕРТОСТАТ ПЛАНИРУЮЩИЙ И СПОСОБЫ ЕГО БАЗИРОВАНИЯ | 2014 |
|
RU2578834C2 |
| Штанговый дизель-молот | 1980 |
|
SU960380A1 |
| ИЗВЛЕКАТЕЛЬ ФУНДАМЕНТОВ ИЗ ГРУНТА | 1999 |
|
RU2170302C2 |
| Сваевдавливающее оборудование | 1984 |
|
SU1231143A1 |
| Свайный копер | 1988 |
|
SU1604928A2 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИЗ ОСНОВАНИЯ ЖЕЛЕЗОБЕТОННЫХ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2000 |
|
RU2177525C2 |
| Свайный копер | 1987 |
|
SU1444474A2 |
| Способ погружения в грунт строительных элементов и устройство для его осуществления | 1979 |
|
SU874872A1 |
| Свайный копер | 1983 |
|
SU1099002A1 |


Использование: для погружения в грунт длинномерных строительных конструкций. Сущность изобретения: в устройстве, содержащем базовую машину с рамой, летательный аппарат и направляющие в виде гибких тяг, рама базовой машины снабжена приспособлением фиксации вертикального положения строительного элемента, гибкие тяги направляющих скреплены попарно между собой элементами жесткости по всей длине, при этом базовая машина снабжена трособлочным приводом подъема строительного элемента, а выпуски арматуры размещены между попарно объединенными гибкими тягами.
Ј
со
ЛГ
OJ
со
a
07
s
9UW11
ЈЭД
С-С
4S
Фиг4
%
37
(Due 5
16
Фиг 7
Фиг 8
| Установка для погружения строительных элементов | 1976 |
|
SU721504A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Установка для сооружения свай в грунте | 1981 |
|
SU1002457A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автогенератор | 1979 |
|
SU862350A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
