Изобретение относится к радиотехнике, в частности к адаптивным антенным решеткам (ААР) в режиме приема сигналов с псевдослучайной перестройкой рабочей частоты (ППРЧ), преимущественно в СВЧ широкополосных системах радиосвязи.
Известны ААР в режиме приема сигналов с ППРЧ. Непосредственное использование алгоритмов пространственной селекции при приеме сигналов с ППРЧ приводит к потере эффективности этих алгоритмов из-за динамизма сигнально-помеховой обстановки и большой ширины полосы сигналов, Общим недостатком ААР в режиме приема сигналов с ППРЧ является невозможность завершения процесса адаптации при малом времени стояния на частоте. Трудности резко возрастают, когда к динамизму сигнально-помеховой обстановки, вызванному прыганьем по частоте сигнала, добавляется динамизм условий работы объектов, на которых устанавливаются ААР: движение, сеансные рёжимы работы и работа короткими пакетами, быстрое изменение направлений прихода полезного сигнала.
Известна ААР для систем связи с перестройкой частоты, принятая в качестве прототипа. В этой ААР с помОщ ь ю Дополнительных процессоров в трактах антенных элементов осуществляется оценка и запоминание весовых коэффициентов при формировании нулей диаграммы направленности в направлениях на помехи независимо от основного приемного тракта, т.е. к моменту перестройки приемного устройства на данную частоту комплексный весовой вектор на этой частоте уже сформирован. Указанная ААР не обеспечивает пространственную селекцию сигнало в и помех в условиях динамичной сигнально-помеховой обстановки, когда Направления прихода сигналов и помех быстро меняются, и записанные в памяти весовые коэффициенты устаревают.:.;. ... . ; , .- :
Целью изобретения является повышение скорости адаптации в условиях быстро меняющихся направлений помех, действующих в сферической области.
Указанная цель достигается тем, что адаптивная антенная решетка для систем, связи с ППРЧ, содержащая N антенных элементов, N комплексных регуляторов вёсо- в-ых коэффициентов, выходы которых соединены с соответствующими вхо дами сумматора, а соответствующие управляющие бходы подключены соответствующим выходам адаптивного процессора, последовательно соединенные гетеродин и смеситель свертки сигналов, блок синхронизации, выполнена сферической, а
антенные элементы - направленными, сумматор выполнен в виде N-1 управляемых весовых сумматоров, объединенных в двоично-этажную схему, при этом выход сумматора соединен с вторым входом смесителя свертки сигналов, а выходы антенных элементов соединены с входами соответствующих комплексных регуляторов весовых коэффициентов, блок взвешивания, блокуп0 равлёния весовыми сумматорами, генератор поисковых ортогональных колебаний, блок выделения дискретной информации, I выход которого является выходом устройства и соединен с входом гетеродина через
5 блок синхронизации, последовательно соединенные, перестраиваемый полосно-про- пускающий фильтр, блок определения наличия свертки, блок задержки и перестраиваемый режекторный фильтр, второй вход
0 которого подключен к выходу смесителя свертки сигналов и к входу перестраиваемого полосно пропускающего фильтра, втйрой вход которого подключен к выходу блока задержки, а выход соединен с входом блока
5 выделения дискретной информации и первым входом блока взвешивания, второй : вход которого подключен к выходу перестраиваемого режекторного фильтра, а пер- вый и второй выходы соединены
0 соответственно с объединенными первыми и вторыми входами адаптивного процессора и блока управления весовыми сумматора- . ми, третий вход которого, объединенный с третьим входом адаптивного процессора,
5 подключен ко второму выходу блока определения наличия свертки, третий выход блока взвешивания соединен с четвертым входом адаптивного процессора, соответствующие пятые входы которого подключены к соот0 ветствующим первым выходам генератора поисковых ортогональных колебаний, вторые выходы которого соединены с соответствующими четвертыми входами блока управления весовыми сумматорами, выхо5 ды которого соединены с управляющими входами соответствующих управляемых весовых сумматоров. При этом блок взвеиЫва- ния состоит из последовательно соединенных первого детектора и первого
0 управляемого аттенюатора, последовательно соединенных второго детектора и второго управляемого а ттенюатора, вторые входы первого и второго управляемых аттенюаторов подключены соответственно к вторым
5 выходам второго и первого детектора, при этом первым и вторым входами блока взвешивания являются соответственно вход первого и .второго детекторов, а первым, вторым и третьим выходами являются ды соответственно первого, второго управляемых аттенюаторов и второй выход второго детектора.
Сравнение заявляемого технического решения не только с прототипом, но и с другими техническими решениями в области адаптивных антенных решеток не позволило выявить в них признаки, сходные с существенными отличительными признаками заявляемом техническом решении - управляемыми сумматорами, блоком управления сумматорами, параллельным управлением адаптивным процессором и блоком управления сумматорами по раздельным трактам помехи и сигнала. При этом полоса пропускания полосового фильтра сигнала равна полосе режекции режекторного фильтра помехи, согласована с полосой инфор- мационного сигнала и имеет два перестраиваемых значейия: узкая полоса в режиме вхождения в связь и синхронизации и широкая полоса, соответствующая приему информационного сигнала, а также блоком определения наличия свертки, блоком задержки и блоком взвешивания. Указанные признаки совместно дают новый положи- те льный эффект: повышение скорости адаптации при приеме на изотропную антенну сигнала с ПОРЧ из любой точки полной сферической области, направление прихода которого априорно неизвестно и быстро меняется, и подавление помех в остальной области-. .. . / ... . .... ,..-, -. .. , ...
В предлагаемом решении ДОС имеет принципиальные отличия от ФАР и МЛА; заключающиеся в том, что если в ФАР и МЛА управляемые сумматоры объединяются совместно с фазовращателями для созда- ния нужного амплитудно-фазового распределения, то в предлагаемом решении управляемые сумматоры объединены с комплексными регуляторами весовых коэффициентов, которые формируют нули в направлениях на помехи, а управляемые сумматоры обеспечивают увеличение усиления в направлении на сигнал и самофокусировку по сигналу. Управление комплексными регуляторами весовых коэффициентов и управляемыми сумматорами осуществляется раздельными процессорами параллельно по двухконтурной схеме (свернутому отфильтрованному сигналу и преобразованной при свертке сигнала с ППРЧ помехе с рёжектированным свернутым сигналом). Таким образом, указанные признаки не только не совпадают с признаками прототипа и аналогов по выполняемой функции и форме выполнения, но и неэквивалентны, т.к. у них разный достигаемый эффект, следовательно, в соответствии с п,п, 6.03 и 6.05 Инструкции ЭЗ-2-74 они
обеспечивают соответствие критерию существенные отличия.
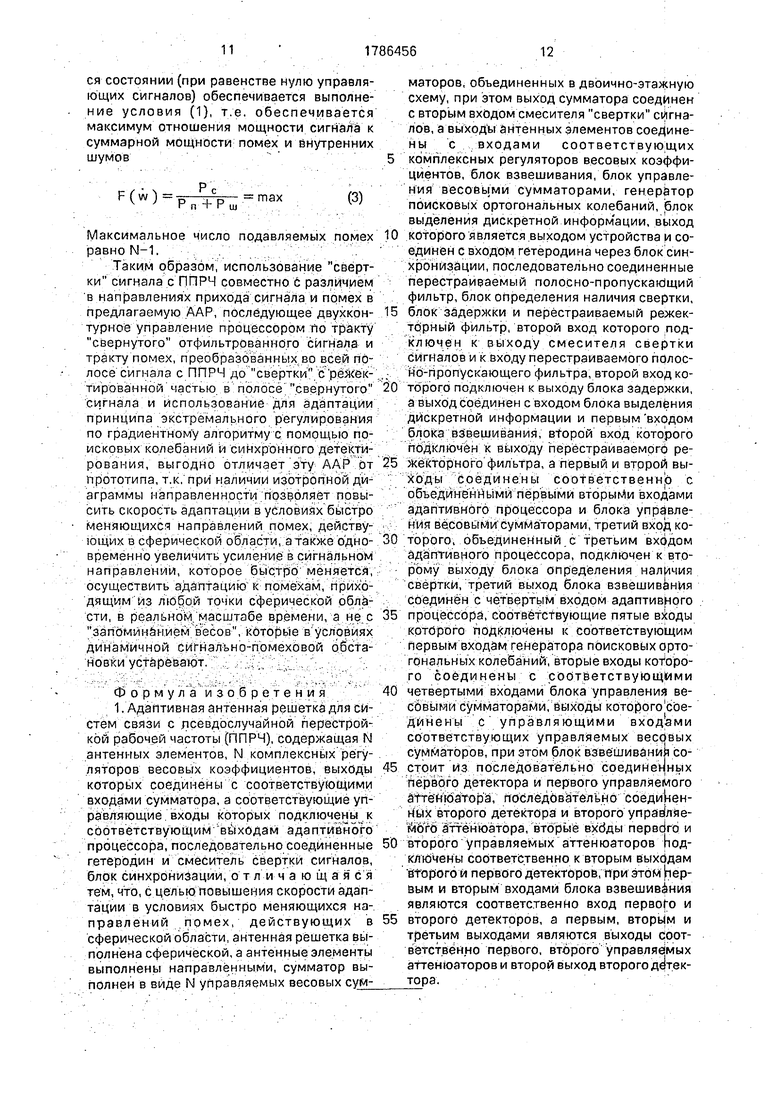
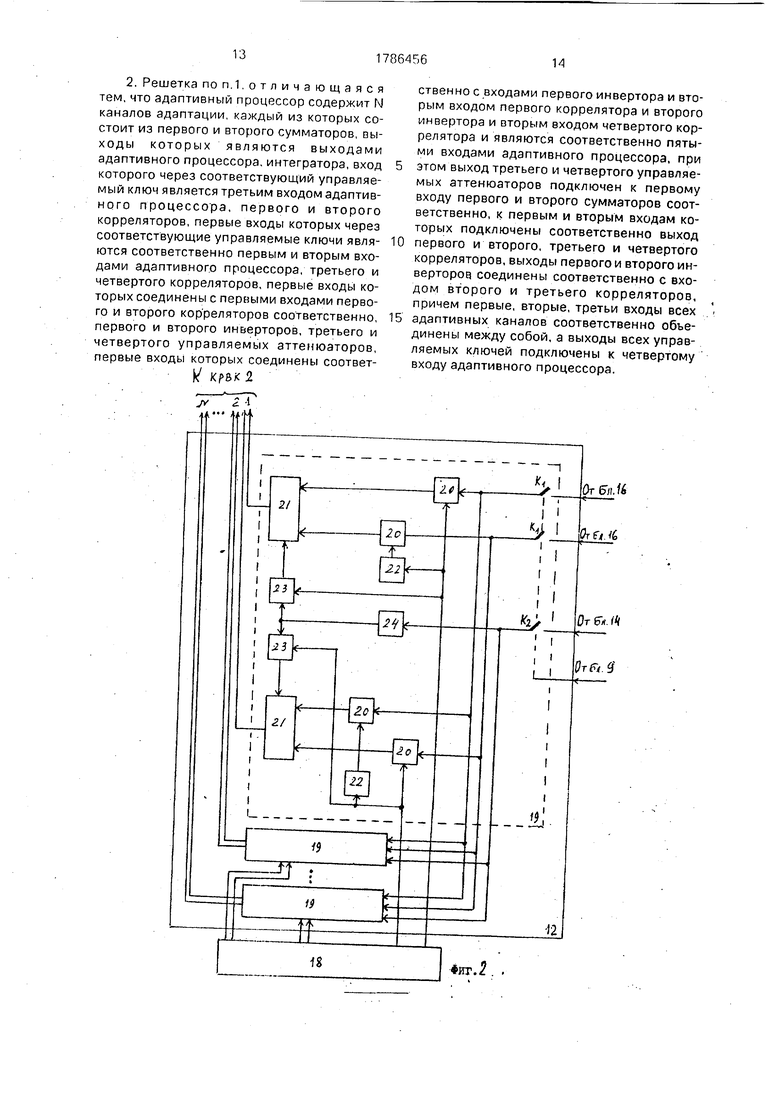
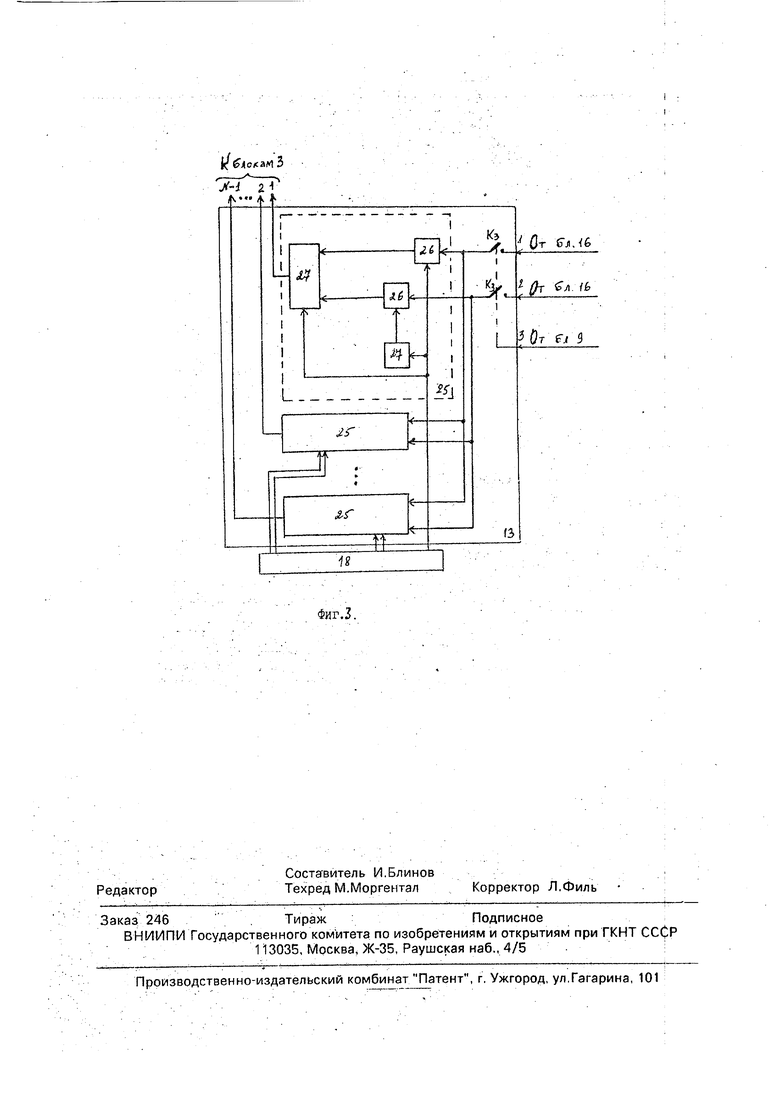
На фиг.1 дана структурная схема предлагаемой адаптивной антенной решетки; на фиг.2 -структурная схема адаптивного про- 5 цессора, на фиг.З - структурная схема блока управления сумматорами.
Адаптивная антенная решетка содержит (фиг.1) N идентичных излучателей 1 с коэффициентом усиления каждого Gi, co- 10 вместно перекрывающих полную сферическую область за счет размещения в вершинах и на гранях икосаэдра или на гранях двух усечённых многогранных пирамид, соединенных плоскостями оснований, так 5 что все излучатели с помощью диаграммо- образующей схемы (ДОС) образуют сферическую изотропную диаграмму направленности с коэффициентом усиления Go 0 дБ. N-выходов излучателей (фиг.1)
0 соединены с N-входами комплексных регуляторов весовых коэффициентов (КРВК) 2, выходы которых соединены с входами N-1 управляемых весовых сумматоров 3, объединенных в двоично-этажную схему елоч-5 ка, выход которой через последовательно соединенные смеситель 4 свертки сигнала и перестраиваемый полосно-пропускаю- щий фильтр 5 подключен к входу блока 6 выделения дискретной информации, выход
0 которого является выходом решетки и одновременно соединен с входом блока 7 синх- . ронизации, выход которого подключен к входу гетеродина 8; Выход перестраиваемого полосно-пропускающего фильтра 5 под5 ключей также к входу блока 9 определения наличия свертки, первый управляющий выход которого через блок 10 задержки подключен к управляющим входам перестрйи- вае мого режекторного фильтра 11- и
0 перестраиваемого полосно-пропускающего фильтра 5, а второй управляющий выход - . параллельно к соответствующим входам адаптивного процессора 12 и блока 13 управления сумматорами, сигнальные входы
5 которых параллельно через первый детектор 15, второй детектор 14 и первый и второй управляемые аттенюаторы 16 блока 17 взвешивания подключены к выходам перестраиваемого полосно-пропускающего
0 фильтра и перестраиваемого режекторного фильтра, опорные входы соединены с выходами генератора 18 поисковых ортогональных колебаний, а управляющие выходы подключены к управляющим входам комп5 лексных регуляторов весовых коэффициентов и управляемых весовых сумматоров.
Адаптивный процессор 12 (фиг.2) содержит N идентичных каналов 19 адаптации, Опорные входы которых соединены с N-выходами генератора поисковых колебаний. Каждый канал адаптации содержит четыре коррелятора 20, попарно объединенных в управляемых сумматорах 21, выходы которых являются выходами канала адаптации для каждой координаты комплексных регуляторов весовых коэффициентов. На входы корреляторов подаются взвешенные огибающие сигнала и помехи через ключи Ki с выхода взвешивающего блока 17, на опорные входы корреляторов подаются ортогональные колебания от генератора 18 на одну пару непосредственно, а на вторую пару через инверторы 22 одновременно поисковые колебания подаются на опорные входы управляемых аттенюаторов 23, выходы которых подключены к управляющим входам сумматоров 21, а объединённые управляющие входы через интегратор 14 соединены с выходом постоянной составляющей помехи квадратичного амп: литудного детектора помехи 14 через ключ К2, который как и ключи Ki управляются сиг-, налом с выхода блока 9.. .;-. ;: :; :: ;
Блок 13 управления сумматорами (фиг.З) содержит N-.1 идентичных каналов 25 управления, каждый из которых содержит два коррелятора 26, объединенных в сумматоре 27, на опорный вход которого, а также на опорные входыГ корреляторов подаются колебания от генератора 18 на один вход непосредственно, а на второй вхбд через сумматор 27. Си гнал ьй ые входы корреляторов через ключи Кз, управляемые блоком 9 наличия свертки, соединены с выходами огибающей сигнала и гюмехй управляемых аттенюаторов 16 взвешйвающе- го блоке 17. . ;.. -,- .. .; . ; / -V .
Предлагаемая ААР работает по принципу экстрёмальнбго регулирована с использованием поисковых колебаний, В качестве критерия оптимальности экстремального регулирования выбран критерий максимума отношений сигнал/помеха + шум. Условием оптимальности настройки по этому критерию является
d(
PC
Рп+Р
ш
)/dw
или
(Рп+Рш)d w d(Pn + P
}
d w
Iw w1
где PC - мощность полезного сигнала на выходе блока 6;
0
5
0
Рп - мощность помехи на выходе блока 6;
Рш мощность, собственных шумов приемного тракта;
w - вектбр весовых коэффициентов.
Из формулы (1) следует, что для настройки по максимуму отношения сигнал/помеха + шум необходимо разделить полезный сигнал и помеху с шумом, оценить мощность сигнала и смеси помехи с шумом, определить их производные и произвести нормировку. С учетом этого в предлагаемой ААР перестраиваемый полосно-пропускающий фильтр 5 выделяет свернутый и отфильтрованный сигнал с ППРЧ, а перестраиваемый режекторный фильтр 11 пропускает преЬб- раэоеанную при свертке помеху во всей полосе сигнала с ППРЧ до свертки, небольшая часть которой вырезана в полЬсе свернутого сигнала. Это позволяет вычислить градиенты по мощности полезного сигd PCd Р п и мощности помехи , . ,
нала
отйормировать их во взвешивающем блоке 17 По отношению к мощностям соответствённо Рс и Рп + РШ и с помощью адаптивнЬго процессора 12 организовать управление комплексными регуляторами весовых коэффициентов 2 (фиг.1) в соответствии с разностью ртнормированных значений
градиентов по полезному сигналу и помехе втекущий момент времени, т.е. осуществить управление комплексными регуляторами весовых коэффициентов 2 в направлении градиента для сигнала и антиградиента для
прмех, в результате чего выполняется формула (1); ;.,-х; ..:,. ....;
Сеанс связи начинается с приема-слу- жебнрг б ракета с минимальной длительностыо : .-. ,
Тел Тех
ад
(2)
где Тех - время синхронизации ППРЧ; Гад - время адаптации ААР.
45 Служебный пакет представляет соЬой пилот-тон с низкой информационной скс|ро- стью (полоса перестраиваемого полос|но- пропускающего фильтра 5 составляет 4-5 Гц) и, следовательно, большой базой, обес50 печивающей гарантированную свертку сигнала смесителя 4 свертки. В этот период коэффициенты передачи каждого управЛяе- мого весового сумматора 3 по обоим входам равны, так что Кч2 +.Ка2 1, и сформирована
55 изотроИная диаграмма направленности с коэффициентом усиления Go 0. Свернутый сигнал с.ППРЧ проходит через фильтр с полосой 4-5 Гц, соответствующей скорс сти
пилот-тона, и поступает на первый детектор 15, с выходов которого снимаются сигналы, пропорциональные квадрату постоянной составляющей Рс и огибающей U2CN . Одновременно с выхода блока 9 сигнал наличие свертки поступает в процессор 12 и блок 13, замыкая ключи Ki и К2 адаптивного процессора 12 и ключи Кз блока 13 управления сумматорами, и через блок задержки 10 с - на управляющие входы фильтров 5и 11.
Сигнал огибающей U2CN , пропорцио- d P с
нальныи . , , через замкнутые ключи Ki a w
и Кз поступает на корреляторы 20 процессе- ра 12 и корреляторы 26 блока 13 всех каналов адаптации. В корреляторах 20 и 26 сигнал огибающей перемножается на соответствующие опорные ортогональные колебания от генератора 18..
Сигналы с выходов корреляторов через сумматоры 21 процессора 12 и сумматоры 27 блока 13 поступают на КРВК 2 и управляемые сумматоры 3 соответственно. Под дей- ствием поисковых ортогональных колебаний сигнал в КРВК 2 и управляемых сумматорах 3 получает амплитудную модуляцию в соответствии с законом тех ортогональных колебаний, которые совпадают с направлением, привода сигнала (соответствующими антенными элементами N). На выходе корреляторов 20 и 26 блоков 12 и 13 формируются сигналы ошибки, величины и знаки которых характеризуют отклонения координат КРВК 2 от тех значений, при которых обеспечивается максимум мощности полезного сигнала, т.е. определяются гра- d PC -- d w i
диенты
i 1,N. Сигналы ошибок,
складываясь с опорными колебаниями своих каналов в сумматорах 21 и 27, поступают на управляющие входы соответствующих КРВК 2. Под действием этих сигналов координаты КРВК 2 изменяются так, чтобы све- сти к нулю сигналы ошибки. Одновременно коэффициенты передачи цепочки тех управляемых сумматоров 3, которые соответствуют антенному элементу, в направлении которого приходит сигнал, устанавливаются равными 1, в результате формируется диаграмма направленности с коэффициентом усиления
,
где GI - коэффициент усиления одного излучателя.
5 0
5 0
5 0 5
0
5
5
0
По сравнению с изотропной ДН усиление возросло на величину G-Go в направлении на сигнал.
В установившемся состоянии КРВК 2 и управляемые сумматоры 3 обеспечивают минимальное ослабление проходящих сигналов и их синфазность, максимизируется мощность полезного сигнала, т.е. ААР самофокусируется по сигналу. В связи с увеличением усиления от Go 0 дБ до G на соответствующую величину может быть увеличена скорость передачи информации. Это осуществляется переключением фильтров 5 и 11 в положение широкой полосы, соответствующей информационной скорости, управляющим сигналом наличие свертки от блока 9 через блок 10 задержки (по окончании процесса адаптации).
При воздействии помехи, направление прихода которой соответствует сектору, закрываемому диаграммой направленности Gi одного из излучателей, в соответствующем этому излучателю комплексном регуляторе весовых коэффициентов 2 и цепочке весовых сумматоров 3 под действием соответствующих опорных колебаний от генератора 18 происходит модуляция параметров этой помехи. Огибающая помехи с выхода квадратичного амплитудного детектора 14 помехи поступает через управляемый аттенюатор16 на перемножители корреляторов 20 через замкнутый ключ Ki всех канало в 19 адаптации адаптивного процессора 12, и одновременно на входы корреляторов 26 блока 13 управления сумматорами. На другие корреляторы 20 и 26 поступает огибающая свернутого сигнала с ППРЧ с первого квадратичного детектора 15. Одновременно на входы сумматоров 21 каналов 19 адаптации адаптивного процессора 12 через управляемые аттенюаторы 23 через интегратор 24 и замкнутый ключ Кз поступает постоянная составляющая помехи с выхода второго квадратичного детектора 14 для обеспечения нормировки. На выходах сумматоров 21 и 27 соответствующих каналов 19, 25 появляются сигналы ошибки, которые пропорциональны отклонениям координат КРВК 2 и управляемых весомых сумматоров 3 от тех значений, при которых обеспечивается минимум мощности помеd PC , хи, т.е. определяется градиент - . , I
1.N. Под действием этих сигналов ошибки происходит изменение значений координат КРВК 2 в сторону компенсации помехи, а коэффициентов передачи цепочки управля-. емых весовых сумматоров 3 - в сторону уменьшения. В результате в установившемся состоянии (при равенстве нулю управляющих сигналов) обеспечивается выполнение условия (1), т.е. обеспечивается максимум отношения мощности сигнала к суммарной мощности помех и внутренних шумов
max
(3)
Максимальное число подавляемых помех равно N-1.
Таким образом, использование свёртки сигнала с ППРЧ совместно с различием в направлениях прихода сигнала и помех в предлагаемую ДАР, последующее двухкон- турное управление процессором по тракту свернутого отфильтрованного сигнала и тракту помех, преобразбванных.во всей полосе сигнала с ППРЧ до свертки С рёжёк- тированной частью, в полосе .свернутого сигналами использование для адаптации принципа экстремального регулирования по градиентному алгоритму с помоа ыо поисковых колебаний и синхронного детектирования, выгодно отличает эту ААР.от прототипа, т.к, при наличии изотропной диаграммы направленности позволяет повысить скорость адаптации в условиях быстро меняющихся направлений помех, действующих в сферической области,.а также одновременно увеличить усиление в сигнальном н а п р а в л ен ни, кото ро е б ы стр О м ён я ется, осуществить адаптацию к помехам, приходящим из любой точки сферической рблё- сти, в реальной. масштабе времени, а.не,с заг1Ьмйн&н.йем в есов, к6торь е в условиях динамичной сигнально-помеховой ббста- :нбвки устаревает. ;,;J ЈiU/:-- :....- :
Ф о р м у л а и з о б р е т е ни я
1 .Адаптивная антенная решетка для систем связи с псевдослучайной перестройкой рабочей частоты (ППРЧ), содержащая N антенных элементов, N комплексных регуляторов весовых коэффициентов, выходы которых соединены с соответствующими входами сумматора, а соответствующие уп- рав/тяющиё. входы которых подключены к соответствующим выходам адаптивного процессора, последовательно соединенные гетеродин и смеситель свертки сигналов, блок синхронизации, о т л и ч а ю щ ая с я тем, что, с целью повышения скорости адаптации в условиях быстро меняющихся направлений , помех, действующих в сферической области, антенная решетка выполнена сферической, а антенные элементы выполнены направленными, сумматор выполнен в виде N управляемых весовых сумматоров, объединенных в двоично-этажную схему, при этом выход сумматора соединен С вторым входом смесителя свертки сигналов, а выход ы антенных элементов соеДине- ны с входами соответствую:щих 5 комплексных регуляторов весовых коэффициентов, блок взвешивания, блок управления весойыми сумматорами, генерйтор поисковых ортогональных колебаний, рлок выделения дискретной информации, выход
0 которого является выходом устройства и соединен с входом гетеродина через блок синхронизации, последовательно соединенные перестраиваемый полосно-пропускага щий фильтр, блок определения наличия свертки,
5 блок задержки и перестраиваемый режек- тбрный фильтр, второй вход которого подключен к выходу смесителя свертки сигналов и к входу перестраиваемого полос; но-пропускающего фильтра, второй вход ко0 тброго подключен к выходу блока задержки, а выход соединен с входом блока выделения дискретной информации и первым входом блока взвешивания, второй вход которого подключён к выходу перестраиваемого ре5 жёкторного фильтра, а первый и второй выходы Соединены соотвётственн|о с объёдйнёнйЫмй первыми вторыми входами адаптивного процессора и блока управлен ия весовыми сумМаторами, третий вход ко0 торого, объединенный с третьим входом адаптивного процессора, подключен к вто р бму выходу блока определения наличия свёртки, третий выход блока взвешивания
сбединён с четвертым входом адаптивного
5 процёссбра, соответствующие пятые входы которого подключены к соответствующим первым входам генератора поисковых ортогональных колебаний, вторые входы которого соединены с соответствующими
0 четвертыми входами блока управления ве- сёвыми сумматорами, выходы кото Ого сое- дйнены с управляющими вход ами соответствующих управляемых весе вых сумматоров, при этом блок взве шивани i со5 стоит из последовательно соединенных первого детектора и первого управляемого аттё йШа тор а, послёдбвательнб соёди ен- н ых второго детектора и второго управ ляе- мбгб аттенюатора, вторые вхбды первого и
0 второго управляемых аттенюаторов Подключены соответственно к вторым выходам ёТорого и первого детекторов, при этом (первым и вторым входами блока взвешивания являются соответственно вход первого и
5 второго детекторов, а первым, вторЦм и третьим выходами являются выходы соответственно первого, второго управляе|мых аттенюаторов и второй выход второго Детектора.
2. Решетка по п. 1,отличающаяся тем, что адаптивный процессор содержит N каналов адаптации, каждый из которых состоит из первого и второго сумматоров, выходы которых являются выходами адаптивного процессора, интегратора, вход которого через соответствующий управляемый ключ является третьим входом адаптив- ного процессора, первого и второго корреляторов, первые входы которых через соответствующие управляемые ключи являются соответственно первым и вторым входами адаптивного процессора, третьего и четвертого корреляторов, первые входы которых соединены с первыми входами первого и второго корреляторов соответственно, первого и второго инверторов, третьего и четвертого управляемых аттенюаторов, первые входы которых соединены соответ- tf
ственно с входами первого инвертора и вторым входом первого коррелятора и второго инвертора и вторым входом четвертого коррелятора и являются соответственно пятыми входами адаптивного процессора, при
этом выход третьего и четвертого управляемых аттенюаторов подключен к первому входу первого и второго сумматоров соответственно, к первым и вторым входам которых подключены соответственно выход
первого и второго, третьего и четвертого корреляторов, выходы первого и второго инверторов соединены соответственно с входом второго и третьего корреляторов, причем первые, вторые, третьи входы всех
адаптивных каналов соответственно объединены между собой, а выходы всех управляемых ключей подключены к четвертому входу адаптивного процессора.
K jlc/самЗ
Jt-i 21
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное устройство приема широкополосного сигнала | 1990 |
|
SU1781826A1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1995 |
|
RU2099838C1 |
| Адаптивное устройство подавления помех | 1985 |
|
SU1552383A1 |
| Адаптивное устройство подавления помех | 1990 |
|
SU1800620A1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 2000 |
|
RU2207680C2 |
| Способ обработки сигналов в модульной адаптивной антенной решетке при приеме коррелированных сигналов и помех | 2015 |
|
RU2609792C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014681C1 |
| МНОГОЛУЧЕВАЯ АДАПТИВННАЯ АНТЕННАЯ РЕШЕТКА | 1983 |
|
SU1840570A1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1986 |
|
SU1840427A1 |
| Адаптивная антенная решетка | 1990 |
|
SU1732408A1 |
Использование: в радиотехнике, в частности адаптивные антенные решетки и адаптивные компенсаторы помех в режиме приема сигналов с псевдослучайной перестройкой рабочей частоты для повышения скорости адаптации. Сущность изобретения: антенная решетка содержит N антенных элементов 1, комплексные регуляторы 2 весовых коэффициентов, сумматор 3, смеситель 4, фильтры 5 и 11, блок 6 выделения- дискретной информации, блок 7 синхронизации, блок 9 определения наличия свертки, блок 10 задержки, блок 17 взвешивания, адаптивный процессор 12, блок 13 управления весовыми сумматорами, генератор 18 поисковых ортогональных колебаний. 3 ил.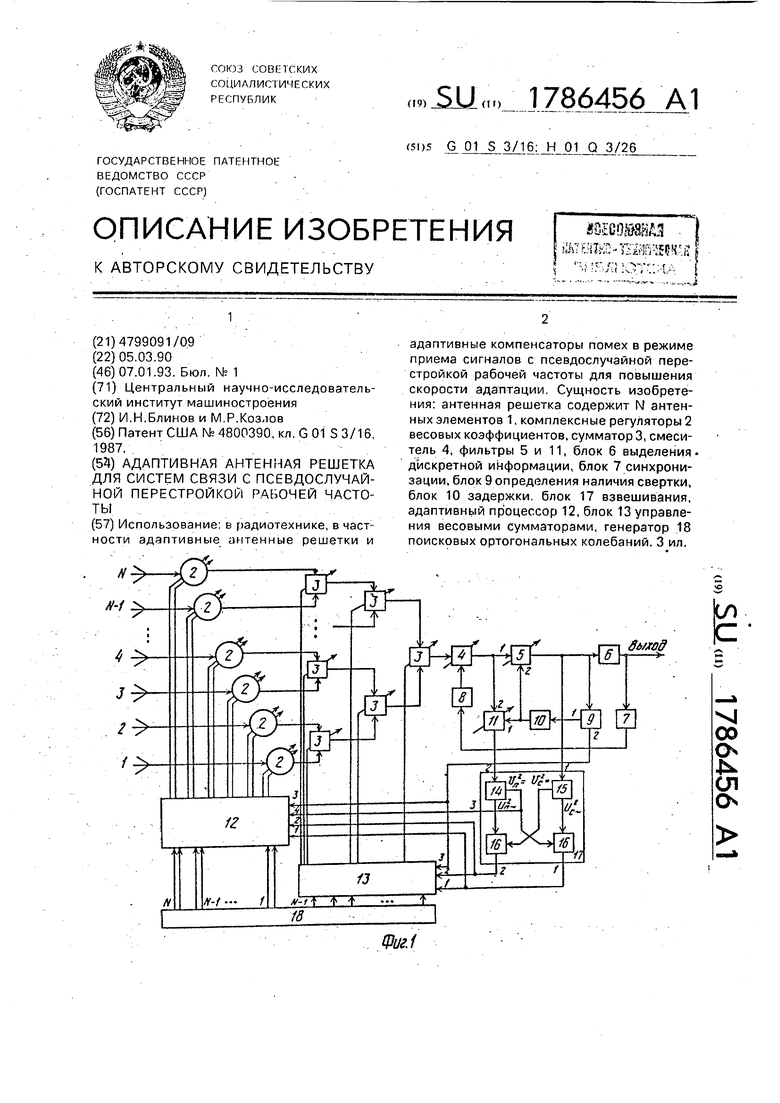
| Патент США № 4800390, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
