Изобретение относится к измерительной технике и может быть использовано для определения положения и измерения перемещений регулирующего органа системы управления и защиты ядерного реактора.
Известен преобразователь линейного перемещения в код, основанный на использовании магнитоуправляемых контактов.
Его недостатками являются низкая надежность в условиях высоких температур и неудовлетворительная точность, обусловленная малым количеством линий связи и соответственно магнитоуправляемых контактов, которые допустимо разместить вдоль рабочего хода штока.
Известен преобразователь линейного перемещения в код системы определения положения регулирующего органа ядерного реактора, обладающий достаточной точностью при малом числе линий связи, принятый за прототип. Известный преобразователь включает катушки индуктивности в качестве чувствительных элементов. Для получения приемлемого отношения уровня логической "1" к уровню логического "0" в нем используются многовитковые катушки. Из-за ограниченности объема, в котором должны быть размещены катушки, для их намотки применяют тонкий провод.
Недостатком такого преобразователя является его не очень высокая надежность, порожденная тем, что при 200-300оС тонкий провод окисляется и разрушается в сроки, которые для перспективных реакторов неудовлетворительны. Ограничивает надежность и недостаточная помехозащищенность преобразователя, связанная с влиянием на него внешних магнитных полей и воздействием на собственное поле катушек соседних деталей из магнитной стали, особенно опасным в случае подвижных деталей и значимом изменении их магнитной проницаемости от температуры.
Целью изобретения является повышение надежности преобразователя.
Эта цель достигается тем, что в преобразователь линейного перемещения в код, содержащий расположенный по одну сторону корпуса подвижный шток, на котором установлено n подвижных элементов преобразователя, где n≥2 целое число, размещенные по другую сторону корпуса подвижные катушки индуктивности, установленные вдоль штока с шагом, кратным шагу установки подвижных элементов преобразования, соединенные с первой группой входов блока обработки, и источник сигналов, введен многополюсный многопозиционный переключатель, а подвижные элементы преобразователя выполнены в виде катушек индуктивности, объединенных в группы и электрически соединенных в каждой группе между собой, полюсные выводы многополюсного многопозиционного переключателя соединены соответственно с выходом источника сигналов и второй группой входов блока обработки, а его позиционные выводы подключены к выводам неподвижных катушек индуктивности.
Это позволяет в условиях конструктивных ограничений, накладываемых на катушки преобразователя, производить их намотку меньшим числом витков существенно более толстого провода, что повышает надежность преобразователя. Кроме того, предложенное техническое решение дает возможность подвижные катушки в каждой группе включить встречно, что обеспечивает связь между катушками в противофазе и, тем самым, способствует улучшению помехоустойчивости, и, соответственно, повышению надежности.
На фиг. 1 приведена структурная схема преобразователя линейного перемещения в код; на фиг. 2 блок обработки; на фиг. 3-6 другие варианты осуществления преобразователя линейного перемещения в код.
Преобразователь линейного перемещения в код (фиг. 1) содержит корпус 1, подвижный шток 2, установленные на нем подвижные элементы преобразования, выполненные в виде подвижных катушек 3-1, 3-2 индуктивности, неподвижные катушки 4-1, 4-2, 4-3, 4-4 индуктивности, источник 5 сигналов, многополюсный многопозиционный переключатель 6, блок 7 обработки, (количество подвижных катушек 3 и соответственно неподвижных катушек 4 в реальных конструкциях преобразователей при достаточно большом диапазоне перемещения штока от 1,5 до 5 м и высоких требованиях к точности преобразования, может намного превышать цифры, приведенные в данном примере). Подвижный шток 2 с подвижными катушками 3 размещен по одну сторону корпуса 1. При этом подвижные катушки 3-1, 3-2 индуктивности объединены в единую группу: электрически соединены между собой.
Неподвижные катушки 4-1, 4-2, 4-3, 4-4 индуктивности размещены по другую сторону корпуса 1 и установлены вдоль штока 2 с шагом, кратным шагу установки подвижных катушек 3-1, 3-2 (на фиг. 1 шаг размещения неподвижных катушек 4 равен шагу подвижных катушек 3).
Неподвижные катушки 4 размещены вдоль штока 2 так, что подвижные катушки 3 при съеме показаний оказываются на уровне неподвижных 4. При этом создается достаточно сильная индуктивная связь между определенными неподвижными катушками 4, например между 4-1, и 4-2 на фиг. 1.
Источник 5 сигналов выполнен в виде генератора колебаний.
Многополюсный многопозиционный переключатель 6 реализован в данном примере в виде переключателя на три положения, два направления. Он может быть известным образом выполнен в виде управляемого вентильного коммутатора, релейной сборки и т. д.
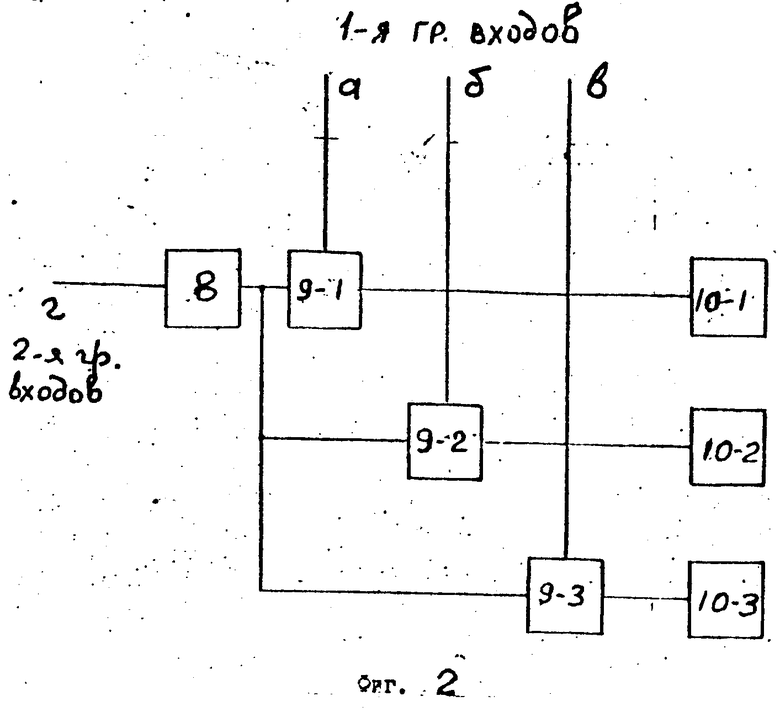
Блок 7 обработки, предназначенный для выделения информативных сигналов и индикации положения регулирующего органа, в варианте, изображенном на фиг. 2, представляет собой совокупность порогового устройства 8, элементов 9 совпадений и индикаторов 10.
Неподвижные катушки 4-1, 4-2, 4-3, 4-4 соединены с первой группой входов блока 7 обработки.
Полюсные выводы многополюсного многопозиционного переключателя 6 соединены соответственно с выходом источника 5 сигналов и второй группой входов блока 7 обработки, а его позиционные выводы подключены к выводам неподвижных катушек 4-1, 4-2, 4-3, 4-4 индуктивности.
На фиг. 1 неподвижные катушки 4 объединены в группы, две из которых состоят из одной катушки каждая (4-2, 4-3), а одна из двух, соединенных последовательно (4-1, 4-4). При этом второй вывод катушки 4-1 соединен не с общим проводом (землей), как для катушек 4-2, 4-3, 4-4, а с первым выводом катушки 4-4.
Объединение в группы (последовательное или параллельное) применяется при необходимости сократить число линий связи в условиях конструктивных ограничений, хотя это и приводит к усложнению обработки информации. Последовательное соединение катушек 4 в группе, показанное на фиг. 1, эффективно для случая, когда источник 5 сигналов является генератором тока.
Преобразователь линейного перемещения работает следующим образом.
Между каждой из подвижных катушек 3-1, 3-2 и расположенной напротив нее неподвижной из ряда 4-1, 4-2, 4-3 и 4- возникает индуктивная связь с коэффициентом связи  knнnп, где k коэффициент, зависящий от конструктивных параметров подвижных и неподвижных катушек и расстояния между ними; nн и nп число витков неподвижной и подвижной катушек соответственно.
knнnп, где k коэффициент, зависящий от конструктивных параметров подвижных и неподвижных катушек и расстояния между ними; nн и nп число витков неподвижной и подвижной катушек соответственно.
Индуктивная связь между любыми двумя неподвижными катушками 4 через подвижные катушки 3-1 и 3-2, соединенные друг с другом, определяется коэффициентом  k2 nн2 nп2. Электромагнитная связь между неподвижными катушками 4, если по крайней мере одна из них не связана с подвижной, в идеале должна отсутствовать, но в действительности вследствие паразитных эффектов определяется коэффициентом
k2 nн2 nп2. Электромагнитная связь между неподвижными катушками 4, если по крайней мере одна из них не связана с подвижной, в идеале должна отсутствовать, но в действительности вследствие паразитных эффектов определяется коэффициентом  , причем
, причем  <<
<<  . (Знак вектора над коэффициентом связи символизирует, что связь может сохранить фазу сигнала, наводимого с одной из неподвижных катушек 4 на другую, либо сдвигать фазу примерно на 180о). Сигнал с выхода источника 5 поступает на полюсный вывод многополюсного многопозиционного переключателя 6. С позиционных выводов он проходит на первую группу входов блока 7 обработки и неподвижные катушки 4. В изображенном на фиг. 1 положении переключателя 6 сигнал поступает на катушки 4-1 и 4-4 (фиг. 1) и первую группу входов блока 7 обработки.
. (Знак вектора над коэффициентом связи символизирует, что связь может сохранить фазу сигнала, наводимого с одной из неподвижных катушек 4 на другую, либо сдвигать фазу примерно на 180о). Сигнал с выхода источника 5 поступает на полюсный вывод многополюсного многопозиционного переключателя 6. С позиционных выводов он проходит на первую группу входов блока 7 обработки и неподвижные катушки 4. В изображенном на фиг. 1 положении переключателя 6 сигнал поступает на катушки 4-1 и 4-4 (фиг. 1) и первую группу входов блока 7 обработки.
Протекающий через катушку 4-1 ток наводит в подвижной катушке 3-1 ЭДС, которая вызывает ток в группе подвижных катушек 3-1, 3-2. Проходя через катушку 3-2, он возбуждает ток в соответствующей неподвижной катушке 4-2. Этот сигнал поступает через позиционные и полюсный выводы переключателя 6 на вторую группу входов блока 7 обработки.
Блок 7 обработки выполняет следующие функции:
1) выделение информативных сигналов от неподвижных катушек;
2) установление, в том числе с участием оператора, номеров соответствующих катушек и дешифровки по упомянутым номерам положения штока 2 в момент опроса с последующей индикацией.
В рассматриваемом примере (фиг. 1) в положении переключателя 6 сигнал с первой группы входов блока 7 обработки проходит на элемент 9-1 совпадений (фиг. 2), а с второй группы входов на пороговый элемент 8, с которого на элементы 9 совпадений подается сигнал, разрешающий срабатывание. Номер сработавшего элемента 9 совпадения индицируется индикатором 10 (в данном случае 10-1). Он показывает, между какими неподвижными катушками 4-1, 4-2, 4-3, 4-4 в рассматриваемой ситуации существует связь через подвижные катушки 3-1, 3-2, и тем самым идентифицирует положение штока 2.
При перемещении штока 2 в любую другую точку шкалы переключатель 6 осуществляет новый цикл переключений, опрашивая неподвижные катушки 4.
Использование связи между неподвижными катушками 4, через посредство подвижных катушек 3, объединенных в группы и электрически связанных между собой, дает возможность повысить отношение уровней логической "1" и логического "0" по сравнению с известным устройством.
Действительно, это отношение определяется выражением
1 +  Поскольку
Поскольку  >>
>>  , даже при меньшем, чем в устройстве-прототипе, числе витков можно получить достаточно большое отношение уровней логической "1" и логического "0". Как следствие, можно применять намотку толстым проводом, который окисляется при высоких температурах медленно, значительно медленнее, чем тонкий провод. В результате повышается срок службы катушек 3, 4 и в конечном счете надежность преобразователя.
, даже при меньшем, чем в устройстве-прототипе, числе витков можно получить достаточно большое отношение уровней логической "1" и логического "0". Как следствие, можно применять намотку толстым проводом, который окисляется при высоких температурах медленно, значительно медленнее, чем тонкий провод. В результате повышается срок службы катушек 3, 4 и в конечном счете надежность преобразователя.
Дальнейшее повышение отношения уровней логической "1" и логического "0" может быть достигнуто за счет встречного включения подвижных катушек 3, объединенных в группы попарно (фиг. 1 катушек 3-1 и 3-2). При этом схема блока 7 обработки, показанная на фиг. 2, может быть сохранена при условии, что пороговый элемент 8 будет инвертировать входной сигнал.
В данном случае фаза информативного сигнала на выходе катушки 4-2, обусловленного передачей его с помощью пары соединенных между собой подвижных катушек 3-1, 3-2 от катушки 4-1, будет противоположна фазе сигнала наводок, вызванных паразитными связями от той же катушки 4-1.
С учетом того, что  >>
>>  , идентификация положения штока 2 осуществляется не только по уровню, но и по фазе, инверсной фазе сигнала на выходе источника 5. При этом внешние магнитные поля, а также изменение магнитной проницаемости и перемещение соседних деталей из магнитной стали оказывают существенно меньшее влияние на результат.
, идентификация положения штока 2 осуществляется не только по уровню, но и по фазе, инверсной фазе сигнала на выходе источника 5. При этом внешние магнитные поля, а также изменение магнитной проницаемости и перемещение соседних деталей из магнитной стали оказывают существенно меньшее влияние на результат.
Рассмотреннный на фиг. 1, 2 пример не предполагает непосредственного участия оператора при работе преобразователя. Участие операторов позволяет существенно упростить решение.
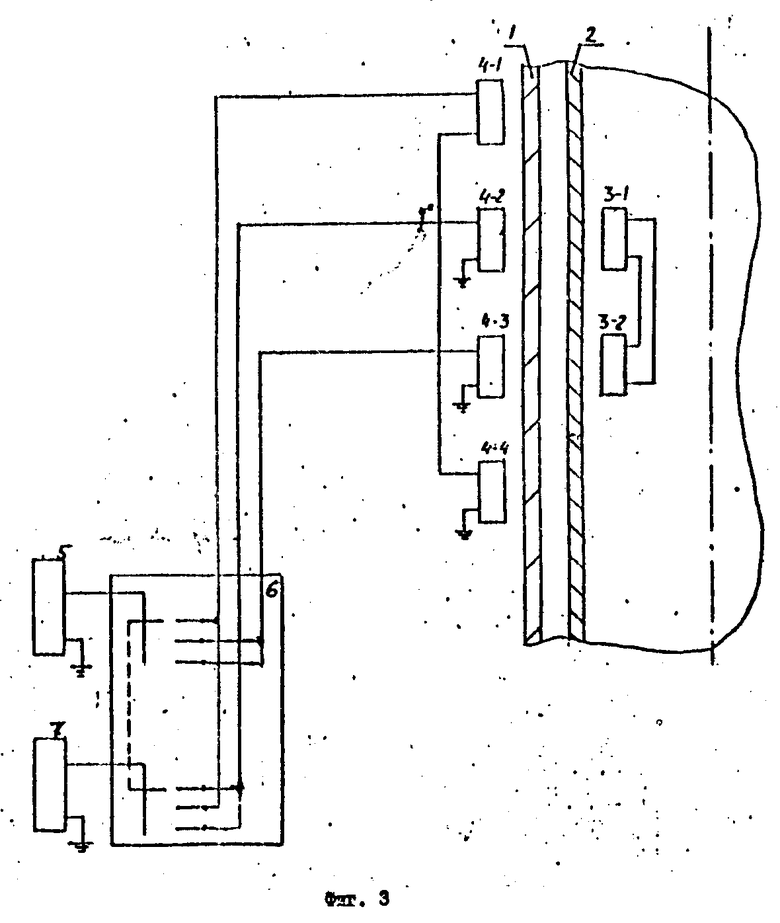
При таком, т. е. неавтоматическом, съеме информации часть связей выражена в неявной форме она реализуется через посредство оператора. На фиг. 3 показан подобный вариант выполнения преобразователя, в котором в качестве инструментальной части блока 7 обработки использован вольтметр. Здесь оператор по наблюдаемым показаниям вольтметра (максимальным показаниям) и наблюдаемому положению переключателя 6, схема соединений которого с неподвижными катушками 4 ему известна, сам определяет положение штока 2. Иными словами, оператор осуществляет визуальную связь неподвижных катушек 4 с блоком обработки, часть функций которого он фактически выполняет.
В отсутствие оператора система работоспособна только при наличии оговоренных связей в явном виде.
Если подвижные катушки 3-1, 3-2 в примере на фиг. 3 включены встречно, то упомянутый выше вольтметр должен быть фазочувствительным, реагирующим на сигнал с фазой, противоположной фазе от источника 5 сигнала, и, следовательно, должен быть связан с источником 5 сигнала.
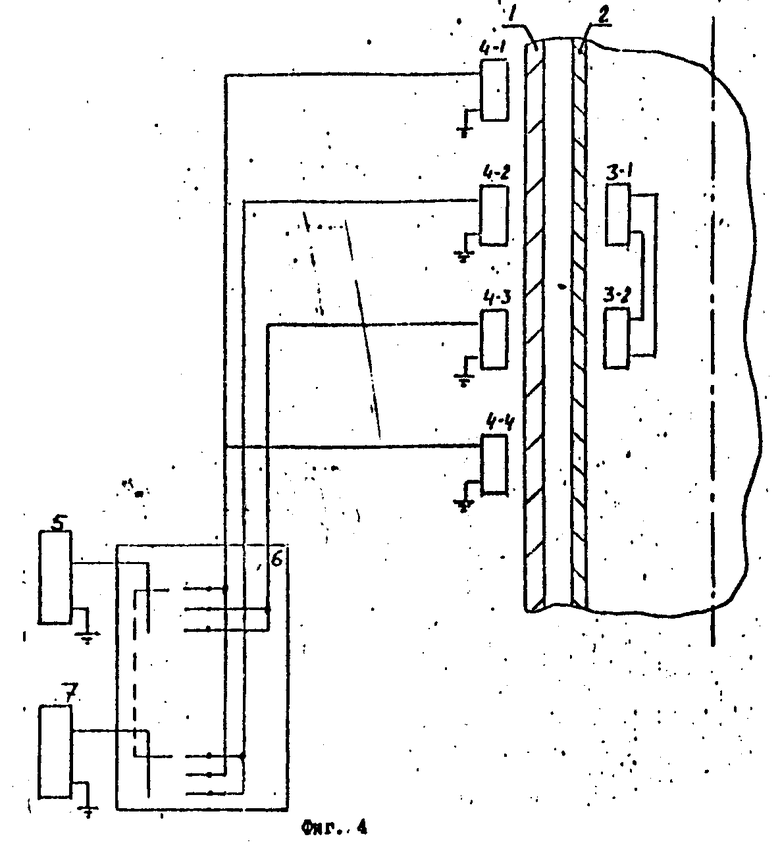
Если в качестве источника 5 сигнала используется генератор напряжения, то соединение неподвижных катушек 4 в группах желательно выполнить параллельным.
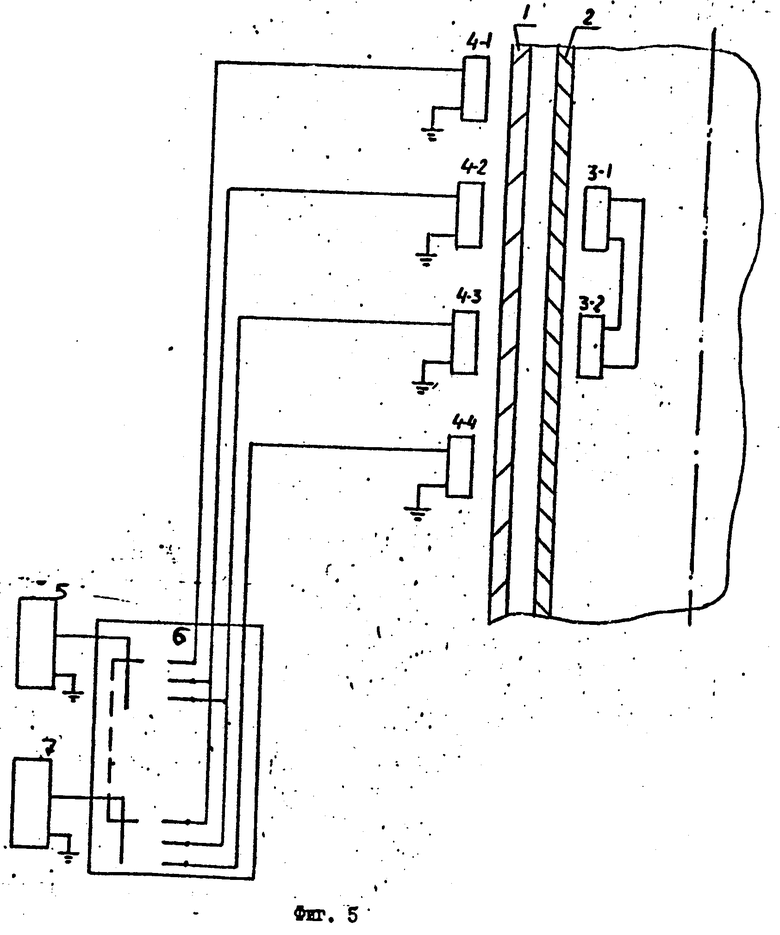
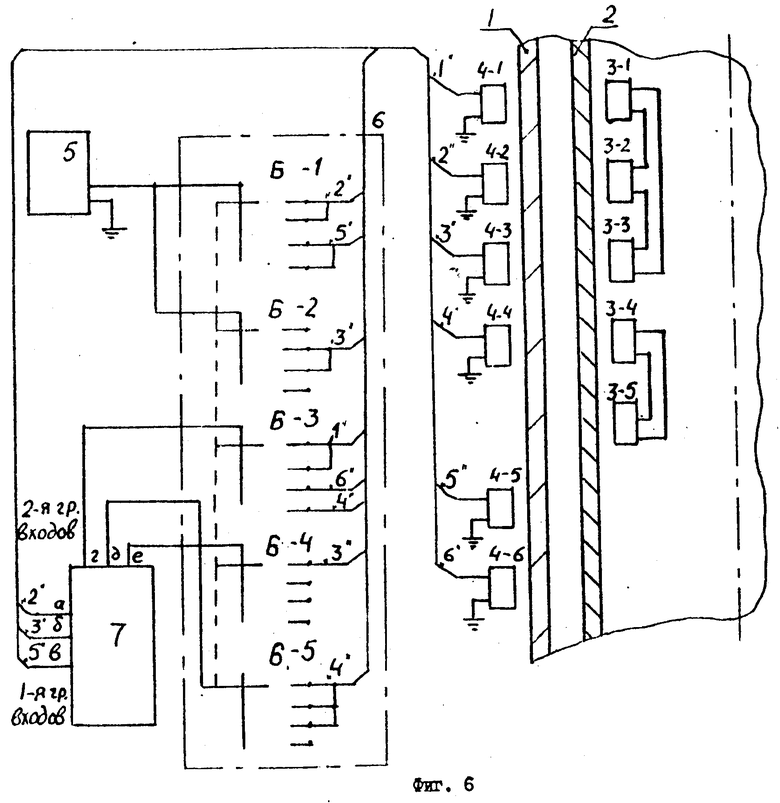
На фиг. 4 показан вариант реализации подобного преобразователя с тремя группами неподвижных катушек, из которых две состоят из одной катушки каждая (4-2 и 4-3), а одна из двух, соединенных параллельно (4-1, 4-4). Если жесткие конструктивные ограничения отсутствуют и допустимо несколько увеличенное количество линий связи, можно все неподвижные катушки 4 соединять с переключателем 6 отдельными проводами. Подобный вариант преобразователя изображен на фиг. 5. Количество индицируемых точек при двух подвижных катушках 3 определяется как m-1, где m количество неподвижных катушек 4. Увеличение количества индицируемых точек может быть в общем случае достигнуто как за счет количества неподвижных 4, так и подвижных 3 катушек. Очевидно, например, что при двух подвижных катушках 3 и семи неподвижных 4 может индицироваться 6 положений. При увеличении количества подвижных катушек 3 и объединении их в несколько групп число точек также увеличивается, но при этом зачастую часть неподвижных катушек 4 можно исключить. Иными словами, неподвижные катушки 4 будут расположены неравномерно, но на расстоянии, кратном шагу подвижных катушек 3.
Это случай иллюстрирует фиг. 6. На ней показан преобразователь, содержащий шесть неподвижных катушек: 4-1, 4-2,4-6 и пять подвижных, объединенных в группы: 3-1, 3-2, 3-3, и 3-4, 3-5. Между катушками 4-4 и 4-5 оставлен пропуск. Положение штока 2 определяется по выявленной связи между следующими катушками: 4-1, 4-2; 4-2, 4-3; 4-1, 4-2 и 4-3, 4-4; 4-1, 4-2, 4-3; 4-2, 4-3, 4-4; 4-3, 4-4 и 4-5, 4-6; 4-4, 4-5; 4-5, 4-6. Всего в этом примере идентифицируется восемь точек.
Блок 7 обработки в этом примере аналогичен показанному на фиг. 2, с той лишь разницей, что здесь должно использоваться восемь элементов 9 совпадений и восемь индикаторов 10, причем элементы 9 совпадений выполнены многовходовыми.
Предложенное техническое решение может быть использовано как в случае построения данного преобразователя с обычной комбинаторной шкалой, так и в случае шкалы с циклическим повторением кодовых комбинаций (последний вариант может найти применение, когда число линий связи должно быть предельно ограничено).
Таким образом, по сравнению с прототипом, данный преобразователь позволяет при малых габаритах катушек индуктивности производить их намотку меньшим числом витков существенно более толстого провода, что резко повышает надежность (срок службы) катушек в условиях повышенной температуры и, соответственно, преобразователя в целом. Кроме того, подвижные катушки в каждой группе, могут быть включены встречно, что улучшает помехозащищенность и способствует дополнительному повышению надежности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Фильтр гармоник коротковолнового передатчика | 2018 |
|
RU2685979C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗОНД ДЛЯ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ МАТЕРИАЛА СТЕНКИ ТРУБЫ | 2005 |
|
RU2293981C1 |
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
| УСТРОЙСТВО АКТИВНОЙ ВИБРОЗАЩИТЫ ЭЛЕКТРОННОЙ АППАРАТУРЫ | 2019 |
|
RU2728914C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| МНОГОДИАПАЗОННОЕ УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ, УСИЛЕНИЯ И ПРЕОБРАЗОВАНИЯ СИГНАЛА | 2015 |
|
RU2629960C2 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2003 |
|
RU2245512C1 |

Изобретение относится к измерительной технике и может быть использовано для определения положения регулирующего органа системы управления и защиты ядерного реактора и измерения перемещения регулирующего органа. Целью изобретения является повышение надежности преобразователя, для чего в преобразователь линейного перемещения в код, содержащий корпус, подвижный шток с установленными на нем подвижными элементами преобразования, неподвижные катушки индуктивности, установленные вдоль штока с шагом, кратным шагу установки подвижных элементов преобразования, блок обработки и источник сигналов, введен многополюсный многопозиционный переключатель, а подвижные элементы преобразования выполнены в виде катушек индуктивности, объединенных в группы и электрически соединенных в каждой группе между собой. Это позволяет при малых габаритах катушек производить их намотку меньшим числом витков существенно более толстого провода, что резко повышает надежность (срок службы) катушек в условиях повышенной температуры. Кроме того, подвижные катушки в каждой группе могут быть включены встречно, что улучшает помехозащищенность и способствует дополнительному повышению надежности. 6 ил.
ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ В КОД, содержащий расположенный по одну сторону корпуса подвижный шток, на котором установлено n подвижных элементов преобразования, где n ≥ 2 целое число, размещенные по другую сторону корпуса неподвижные катушки индуктивности, установленные вдоль штока с шагом, кратным шагу установка подвижных элементов преобразования, и соединенные с первой группой входов блока обработки, и источник сигналов, отличающийся тем, что, с целью повышения надежности преобразователя, в него введен многополюсный многопозиционный переключатель, а подвижные элементы преобразования выполнены в виде катушек индуктивности, объединенных в группы и электрически соединенных в каждой группе между собой, полюсные выводы многополюсного многопозиционного переключателя соединены соответственно с выходом источника сигналов и второй группой входов блока обработки, а его позиционные выводы подключены к выводам неподвижных катушек индуктивности.
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ В КОД | 1986 |
|
SU1382378A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
