гвгзгзя ге гг /
№й/
вателя при одновременном обеспечении нечувствительности преобразователя к начальным угловым перемещениям и линейным перемещениям обьекта контроля в заданных диапазонах их изменения. Для этого в преобразова1вль введены сферический шарнир 7 и подвижный шток 9, выступающий за пределы электропроводящего элемента б и рукоятки 10 связи Две дополнительные соединенные между собой встречно-последовательно катушки 19 и 20 индуктивности радиуса RK расположены в двух параллельных плоскостях на расстоянии более 2RK в центральном пазу корпуса и охватывают сердечник 23, имеющий скользящий контакт с наконечником штока 9 Электропроводящий элемент 6 и электропроводные сердечники 21 токовихревого
датчика положения этого элемента имеют конические и цилиндрические участки и взаимодействуют с катушками 15 и 16, форми- руя сигналы об угловых перемещениях рукоятки 10. Диэлектрический сердечник 23 с насаженной на его конце электропроводящей втулкой 25 взаимодействует с катушками 19 и 20 индуктивности, формируя сигнал о линейных перемещениях штока 9. За счет выбора геометрических параметров сердечников, катушек индуктивности и их взаимного расположения обеспечивается независимость всех трех выходных сигналов от начальных перемещений рукоятки 10 в диапазоне углов ±у0 и штока 9 в диапазоне линейного перемещения Zo. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Преобразователь угловых перемещений | 1989 |
|
SU1696850A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Двухкоординатный преобразователь угловых перемещений | 2017 |
|
RU2653117C1 |

Изобретение относится к измерительной технике и может быть использовано в системах управления перемещением подвижных объектов. Цель изобретения - расширение функциональных возможностей двухкоординатного датчика угловых перемещений за счет обеспечения также и измерения линейных перемещений объекта контроля вдоль продольной оси преобразо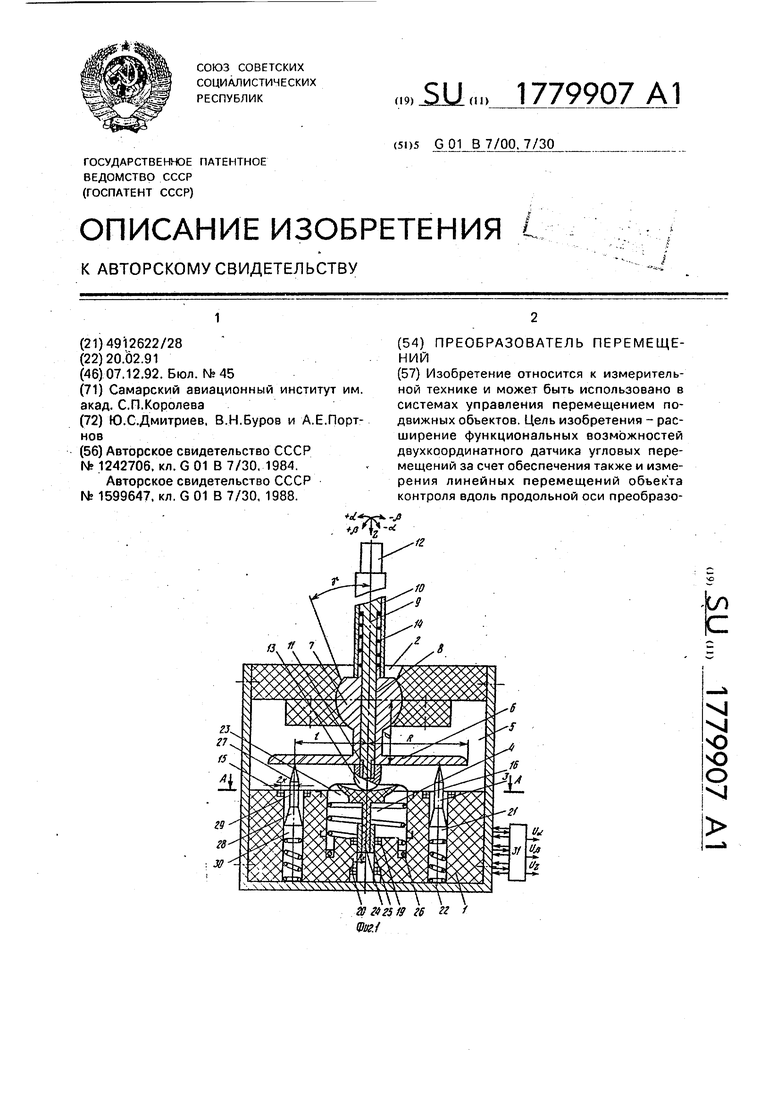
Изобретение относится к электроизмерительной технике и автоматике и может быть использовано в системах управления перемещением подвижных объектов (машин, судов, летательных аппаратов)
Известен преобразователь перемещений, содержащий корпус, телескопически сопряженные стержень и направляющую, датчик линейных перемещений стержня, неферромагнитный электропроводящий сферический экран и несколько катушек индуктивности, установленных в корпусе во взамно перпендикулярных плоскостях и симметрично относительно оси экрана, подключенных к блоку электроники
Преобразователь позволяет формировать сигналы or угловых и линейных перемещениях стержня, однако, не имеет зон нечувствительности к начальным перемещениям стержня, что ограничивает область его использования как элемента управления перемещением подвижных объектов, поскольку вибрация машин может вызвать появление ложных управляющи . сигналов Наиболее близким техническим решением к данному изобретению является преобразователь перемещений, содержащий разъемный полый диэлектрический корпус, имеющий секторный вырез с углом у, размещенный в его полости с возможностью поворота электропроводящий элемент, выполненный в виде части шара радиуса R, прикрепленную к нему одним концом рукоятку для связи с объектом контроля, которая размещена в секторном вырезе корпуса, вихретоковый датчик положения электропроводящего элемента, выполненный в виде четырех идентичных катушек индуктивности радиуса RK, которые /ста
новлены в корпусе попарно симметрично относительно его продольной оси и соединены в парах последовательно-встречно, и пять скользящих опор, взаимодействующих
с плоской поверхностью электропроводя- щв о элемента, каждая из которых выполнена в виде подпружиненного ступенчатого сердечника и размещена в соответствующем пазу корпуса, один из пазов расположен в центре корпуса на продольной.оси, а четыре остальных расположены соосно с соответствующей катушкой индуктивности, расположенные в этих четырех пазах сердечники выполняют функции подвижных
элементов вихретокового датчика положения, каждый из них состоит из четырех жестко соединенных участков, первый и третий из которых имеют коническую форму и одинаковую длину, а второй и четвертый имеют
цилиндрическую форму с различающимися в два раза диаметрами.
Этот преобразователь позволяет формировать сигналы об угловых перемещениях рукоятки связи с управляющим объектом
по двум координатам, причем обеспечивает нечувствительность к угловым перемещениям рукоятки в заданном диапазоне изменения у ±у0.. Однако преобразователь не может быть дополнен элементами, oQecne- f
чивающими формирование сигнала о линейных перемещениях элементов рукоятки вдоль ее оси.
Целью изобретения является расшире- ние функциональных возможностей за счет преобразования также и линейного перемещения по продольной оси преобразователя при обеспечении нечувствительности сигналов к начальным перемещениям рукоятки по всем координатам.
Это достигается тем, что преобразователь перемещений, содержащий разъемный полый диэлектрический корпус, имеющий секторный вырез с углом у, размещенный в его полости с возможностью поворота электропроводящий элемент, выполненный в виде части шара радиуса R, прикрепленную к нему одним концом рукоятку для связи с объектом контроля, которая размещена в секторном вырезе корпуса, вихретоковый датчик положения электропроводящего элемента, выполненный в виде четырех идентичных катушек индуктивности рэдиу- са RK. которые установлены в корпусе попарно симметрично относительно его продольной оси и соединены в парах последовательно-встречно, и пять скользящих опор, взаимодействующих с плоской повер- хностью электропроводящего элемента, каждая из которых выполнена в виде подпружиненного ступенчатого сердечника и размещена в соответствующем пазу корпуса, один из пазов расположен в центре кор- пуса на продольной оси, а четыре остальных расположены соосно с соответствующей катушкой индуктивности, расположенные в этих четырех пазах сердечники выполняют функции подвижных элементов вихретоко- вого датчика положения, каждый из них состоит из четырех жестко соединенных участков, первый и третий из которых имеют коническую форму и одинаковую длину, а второй и четвертый имеют цилиндрическую, форму с различающимися в 2 раза диаметрами, снабжен установлен ным на продольной оси ским шарни ром. жес т.к о. с о е д и - ненным с рукояткой и электропроводящим элементом и имеющим сквозное отверстие, проходящим через это отверстие и через отверстия в электропроводящем элементе и в рукоятке, выполненной в виде полого стержня, штоком с опорным наконечником, шток установлен с возможностью линейного перемещения вдоль продольной оси преобразователя и подпружинен с помощью пружины, установленной в полости рукоят- ки и упирающейся в поверхность сфериче- ского шарнира, двумя дополнительными катушками индуктивности радиуса RK, расположенными в центральном пазу корпуса на расстоянии одна от другой, превышающем 2R, и соединенных между собой последова- тельно-встречно, и электропроводной втулкой, охватывающей центральный сердечник и имеющей длину, равную расстоянию между плоскостями дополнительных катушек индуктивности, втулка установлена со смещением вдоль продольной оси преобразователя относительно плоскости дополнительных катушек в направлении электропроводящего элемента, величина этого смещения равна сумме RK и части длины этой втулки, на которую она превышает диаметр одной катушки, центральный сердечник выполнен в виде диэлектрического стержня, на конце которого выполнена площадка с криволинейной поверхностью, в которую упирается наконечник штока, последний выступает за пределы электропроводящего элемента преобразователя, с одной стороны и за пределы рукоятки - с другой стороны.
Конструкция преобразователя позволяет формировать сигналы об угловых перемещениях рукоятки, обеспечивая за счет выполнения формы сердечников и их размеров нечувствительность к начальным угловым перемещениям. Введение новых элементов позволяет дополнительно формировать сигнал о линейных перемещениях штока, а выбор размеров и расположения катушек индуктивности, а также электропроводящей втулки обеспечивает создание зоны нечувствительности к начальным перемещениям штока. Эти особенности конст- рукции расширяют функциональные возможности преобразователя, обеспечивая его использование в качестве элемента управления подвижных объектов, где возможны случайные изменения подвижных элементов преобразователя под действием вибрации.
Сходные признаки, которые дают тот же положительный эффект, не содержат известные решения. Таким образом, заявленный преобразователь обладает новизной/ полезностью и существенными отличиями.
На фиг.1 схематично изображен преобразователь перемещений; на фиг.2 - сечение А-А на фиг.1.
Преобразователь перемещений (фиг.1) содержит разъемный полый диэлектрический корпус 1, в верхней части (не показана) которого имеется секторный вырез 2 с углом у. а в нижней части (не показана) имеются четыре периферийных паза 3, выполненных попарно диаметрально противоположно, и центральный паз 4. Между верхней и нижней частями корпуса 1 имеется полость 5. в которой установлен с возможностью поворота электропроводящий элемент 6, выполненный в виде части усеченного с двух сторон шара радиуса R и жестко соединенный со сферическим шарниром 7, закрепленным в корпусе 1. Через центральное отверстие 8 шарнира 7 и отверстие в рукоятке 10 для связи с объектом конфолл, выполненной в виде полого стержня, проходит шток 9. Концевые участки 11 и 12 штока 9 выступают соответственно над плоскостью электропроводящего элемента б и концом рукоятки 10. Шток 9 имеет свободный про- дольный ход, ограниченный с одной стороны наконечником 13, закрепленным на выступающем участке 11 штока 9, а с другой стороны с пружиной 14, установленной в полости рукоятки 10 и закрепленной из што- ке 9 и сферическом шарнире 7,
В корпусе 1 соосно с соответствующим периферийным пазом 3 установлены в одной плоскости четыре идентичные катушки 15-18 (фиг.1 и 2) индуктивности с радиусом RK. Эги катушки соединены между собой попарно-дифференциально,
В центральном пазу 4 корпуса установлены соосно в параллельных плоскостях соединенные между собой дифференциально две дополнительные катушки 19 и 20 индуктивности. Осевое расстояние между ними равно 2RK+Zo, где Z0 - заданная зона нечувствительности к линейным перемещениям штока 9 вдоль продольной оси. Расстояние между плоскостями катушек 19 и 20 индуктивности оределяет .свободный продольный ход штока 9.
Катушки 15-18 (фиг.2) индуктивности охватывают идентичные сердечники 21, опи- рающиеся на пружины 22 (фиг.1), которые установлены в пазах 3 корпуса 1. Дополнительные катушки 19 и 20 индуктивности охватывают центральный сердечник 23, который выполнен в виде диэлектрическо- го стержня 24. На одном конце этого стержня выполнена площадка с поверхностью сегмента для контакта с наконечником 13 штока 9, а на другом насажена электропроводная втулка 25 длиной, равной расстоя- нию между плоскостями катушек 19 и 20 индуктивности. Эта втулка установлена со смещением вдоль продольной оси штока 9 относительно плоскости катушек 19 и 20 индуктивности на величину, равную RK + Zo в направлении электропроводящего элемента О. Центральный сердечник 23 подпружинен с помощью пружины 26. Катушки 15-18 установлены в корпусе 1 на расстоянии от поверхности электропроводящего элемента б, не превышающем величины Psln у. Первый и третий участки 27 и 28 сердечников 21 выполнены коническими 1 их длины выбраны одинаковыми и равными Li,s Rsin у- RK, а второй и четвертый участ- ки 29 и 30 сердечников 21 выполнены цилиндрическими с различающимися в 2 раза диаметрами, причем диаметр четвертого участка 30 сердечников 21 выбраны наибольшими и близкими к внутреннему диаметру катушек 15-18 индуктивности. Второй участок 29 сердечника 21 выполнен длиной 2RK Isiny, где 1 Rcos у- asin у; а - расстояние от центра сферического шарнира 7 до поверхности электропроводящего элемента б, контактирующей с сердечником 21; у0 - заданная угловая зона нечувствительности преобразователя к угловым перемещениям рукоятки 10. При а R длина 2RK + Rsin ya(cos у- slny). Сердечники 21 и 23 имеют скользящие контакты соответственно с плоской поверхностью электропроводящего элемента б и наконечником 13 штока 9. Выводы катушек 15-20 индуктивности подключены к блоку 31 электроники, со- стоящему из высокочастотного формирователя возбуждающих сигналов и трех типовых идентичных каналов преобразователя выходных сигналов этих катушек, образующих вихретоковые датчики для измерения перемещения их подвижных сердечников 21 и 23. Каждая пара катушек 15 и 16, 17 и 18 и 19 и 20 индуктивности подключена к генератору прямоугольных импульсов через последовательно соединенные формирователь импульсов и усилитель мощности, а средние выводы этих пар катушек индуктивности соединены с соответствующим каналом преобразования их выходных сигналов, состоящим из последовательно соединенных усилителя сигнала и синхронного детектора, опорный вход которого соединен с формирователем возбуждающего сигнала.
Преобразователь перемещений работает следующим образом.
В исходном состоянии рукоятка 10 занимает положение, перпендикулярное относительно плоскости установки катушек 15-20 индуктивности. При питании этих катушек индуктивности напряжением высокой частоты, поступающим, от генератора блокаЗ электроники, наведенные от создаваемых ими магнитных полей вихревые токи, протекающие по поверхности участков 29 электропроводящих сердечников, будут равны, поскольку геометрические параметры этих участков 29, в центре симметрии которых установлены катушки 15-18 индуктивности, одинаковы, а магнитное поле вихревых токов, протекающих по поверхности электропроводящей втулки 25 сердечника 23, будет воздействовать только на катушку 19 индуктивности, не влияя на катушку 20 индуктивности, поскольку расстояние от края втулки 25 до катушки 20 индуктивности больше R. Таким образом, со средних точек пар катушек 15, 16 и 17, 18 индуктивности
будут сниматься нулевые сигналы Ua : 0 и Uy3 0, а со средней точки пары центральных катушек 19 и 20 индуктивности будет сниматься отрицательный сигнал .
Такого уровня и близкого к нему напряжения на выходе блока 31 электроники преобразователя сохраняются в некотором диапазоне нечувствительности к угловым перемещениям (±у0) рукоятки 10 по любой координате и линейным перемещениям (Z0) штока 9 рукоятки 10 относительно исходного. Это достигается выбором геометрических параметров катушек 15-20 индуктивности, сердечников 21 и 23, электропроводящей втулки 25, электропроводящего элемента 6 и взаимным их расположением в корпусе 1. При выборе длиньГучастка 29 сердечника 21 в виде L2 2Пк + Isin уо 2Рк согласно теории вихревых токов влияние участков 27 и 28 сердечников 21 на катушки 15-18 индуктивности, приводящие к изменению Уаи U/, будет только при углах у у0 отклонения рукоятки 10. Теория вихревых токов и экспериментальные данные показывают, что изменение геометрических параметров сердечника катушки индуктивности начинают влиять на выходной сигнал (краевой эффект) только на расстоянии, меньшем, чем радиус- катушки индуктивности. При этом любые угловые перемещения рукоятки 10 не приводят к изменению сигналов на катушках индуктивности за счет расположения электропроводящей втулки 25 относительно катушек 19 и 20 индуктивности, выбора ее длины, равной (2RK + Zo). и обеспечения постоянства контакта между наконечником 13 и сердечником 23, достигаемого использованием пружины 26 и выполнением конца сердечника 23 в виде части площадки с поверхностью сегмента с центром в центре вращения сферического шарнира 7. Перемещение штока 9 относительно исходного на величину Zo приводит к перемещению электропроводящей втулки 25 на ту же величину, но сигналы на катушках 19, 20 индуктивности не изменяются, поскольку расстояние от катушек 19,20 индуктивности до краев втулки 25 остается не менее RK.
При угловых перемещениях рукоятки 10. происходит поворот электропроводящего элемента б вокруг центра вращения сферического шарнира 7. При этом сердечник 23 начального положения не изменит, а в диаметрально противоположных пазах 3 сердечники 21 перемещаются в противоположных направлениях, взаимодействуя с пружинами 2. При угловых перемещениях по обеим угловым координатам рукоятки 10 значительное число магнитных силовых линий полей, со- 5 здаваемых катушками 15-18 индуктивности, начнут пересекать поверхности участков 27 и 28 сердечников 21. При этом сигналы каждой катушки 15-18 индуктивности, соединенных в пары, из-за противоположных
0 перемещений сердечников 21 изменяются в противоположных направлениях, поскольку в зону влияния одной катушки индуктивности попадает участок 27 сердечника 21, в зону влияния другой катушки индуктивно-
5 сти, соединенной с первой, попадает участок. 28 сердечника 21. Поскольку диаметры участков 27 и 28 сердечников 21 различны, то разностные сигналы, снимаемые со средних точек каждой пары катушек 15. 16 и 17,
0 18 индуктивности, будут отличны от нуля. При больших углах у перемещения рукоятки 10, близких к максимальным, электропроводящий элемент 6 приближается к одной из двух катушек 15, 16 и 17, 18 индуктивно5 сти, соединенных в пары, и в нем также наводятся вихревые токи, которые формируют магнитное поле, воздействующее -на эту же катушку индуктивности, создавая эффект уменьшения величины перемещения
0 части 27 сердечника 21. Этот эффект необходим, поскольку позволяет скомпенсировать при больших у неодинаковость перемещений сердечников 21 в каждой из катушек 15-18 индуктивности, соединенных
5 в пары и тем самым обеспечить необходимую линейность выходного (разностного) сигнала каждой пары катушек индуктивности во всем диапазоне угловых перемещенийрукоятки10.Влияние
0 электропроводящего элемента 6 на катушки 15-18 индуктивности начинается, когда расстояние до них не больше RK, что следует из теории вихревых токов. Неодинаковость перемещений сердечников 21 в каждой паре
5 катушек 15, 16 и 17, 18 индуктивности возникает из-за того, что центр плоской поверхности электропроводящего . элемента 6, являющийся диамет.рал ьной плоскостью усеченного шара, не совпадает с центром
0 вращения, который находится в центре сферического шарнира 7, Необходимая линейность выходных сигналов подбирается экспериментально выбором параметров R, а, I, длины участков 27 сердечников 21 и
5 расстояния от электропроводящего элемента 6 до плоскости установки катушек 15-18 индуктивности, а также выбором величины электропроводности материала электропроводящего элемента 6.
При нажатии на выступающую часть 12 штока 9, обеспечивающем его перемещение Z Z0, наконечник 13 штока 9 будет взаимодействовать на торцовую поверхность сердечника 23 независимо от углового положения рукоятки 10, сжимая пружину 26 и перемещая электропроводящую втулку 25 по центральному пазу 4. При симметричном расположении втулки 25 относительно катушек 19 и 20 индуктивности разностный сигнал, снимаемый с них,будет равен нулю (Uz 0), а при дальнейшем перемещении штока 9 в том же направлении втулка 25 займет положение, противоположное исходному положению относительно катушек 19 и 20 индуктивности. На выходе блока 31 электроники появится положительный сигнал Uz /0. При этом сигналы об угловых перемещениях рукоятки 10 не изменятся.
Таким образом, преобразователь позволяет формировать три независимых сигнала, два из которых об угловых перемещениях рукоятки по двум координатам, а один о линейных перемещениях штока в рукоятке по ее оси, при этом обеспечивается их защищенность от случайных начальных перемещений рукоятки и штока в заданных диапазонах их изменения.
Формула изобретения Преобразователь перемещений, содержащий разъемный полый диэлектрический корпус, имеющий секторный вырез с углом у, размещенный в его полости с возможностью поворота электропроводящий элемент, выполненный в виде части шара радиусом R, прикрепленную к нему одним концом рукоятку для связи с объектом контроля, которая размещена в секторном вырезе корпуса, вихретоковый датчик положения электропроводящего элемента, выполненный в виде четырех идентичных катушек индуктивности радиусом RK, которые установлены в корпусе попарно симметрично относительно его продольной оси и соединены в парах последовательно встречно и пять скользящих опор, взаимодействующих с плоской поверхностью электропроводящего элемента, каждая из которых выполнена в виде подпружиненного ступенчатого сердечника и размещена в соответствующем пазу корпуса, один из пазов расположен в центре корпуса на продольной оси, а четыре остальных располо- , жены соосно с соответствующей катушкой индуктивности, расположенные в этих четырех пазах сердечники выполняют функции подвижных элементов вихретокового датчика положения, каждый из них состоит из четырех жестко соединенных участков, первый и третий из которых имеют коническую
форму и одинаковую длину, а второй и четвертый - цилиндрическую форму с различающимися в два раза диаметрами, отличающийся тем, что, с целью расширения функциональных возможностей за счет преобразования также и линейного перемещения по продольной оси преобразователя, он снабжен установленным на этой оси сферическим шарниром, жестко соединенным с рукояткой и электропроводящим элементом
и имеющим сквозное отверстие, проходящим через это отверстие и через отверстия в электропроводящем элементе и в рукоятке, выполненной в виде полого стержня, штоком с опорным наконечником, шток установлен с возможностью линейного перемещения .вдоль продольной оси преобразователя и подпружинен с помощью пружины, .установленной в полости рукоятки и упирающийся в поверхность
сферического шарнира, двумя дополнительными катушками индуктивности радиусом RK. расположенными в центральном пазу корпуса на расстоянйи одна от другой, превышающем 2Нк, и соединенными между собой последовательно встречно, и электропроводной втулкой, охватывающей центральный сердечник и имеющей длину, равную расстоянию между плоскостями дополнительных катушек индуктивности, втулка установлена со смещением вдоль продольной оси преобразователя относительно плоскости дополнительных катушек в направлении электропроводящего элемента, величина этого смещения равна сумме RK и части длины этой втулки, на которую она превышает диаметр одной катушки, центральный сердечник выполнен в виде диэлектрического стержня, на конце которого выполнена площадка с криволинейной
поверхностью, в которую упирается наконечник штока, преобразователя с одной стороны и за пределы рукоятйи - с другой стороны.
19
tet ..
H
| Устройство для измерения перемещений объекта относительно основания | 1985 |
|
SU1242706A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двухкоординатный преобразователь угловых перемещений | 1988 |
|
SU1599647A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
