(Л
С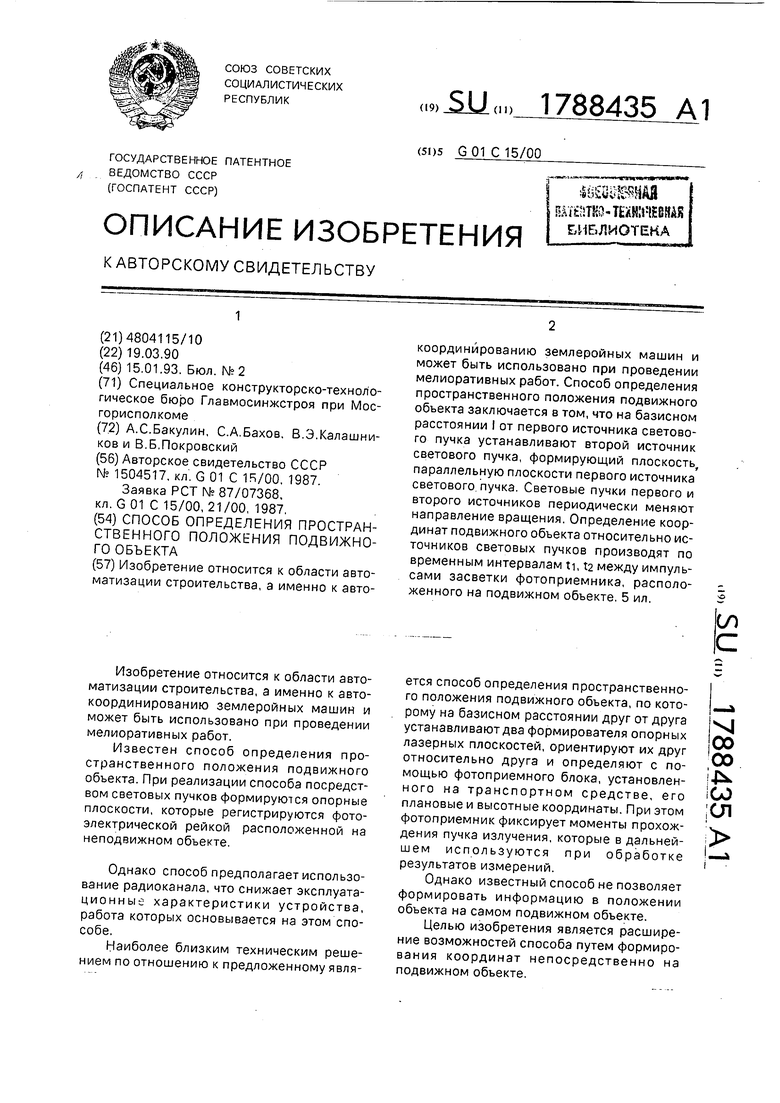
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| Устройство для измерения расстояний до объекта | 1989 |
|
SU1716326A1 |
| Фотоэлектрический способ преобразования информации | 1990 |
|
SU1810857A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271014C2 |
| Фотоэлектрическое устройство бесконтактного измерения перемещения объекта | 1986 |
|
SU1425436A1 |
| Фотоэлектрическое устройство для измерения параметров перемещения кареток | 1974 |
|
SU529363A1 |
| Способ измерения поперечного размера детали и устройство для его осуществления | 1989 |
|
SU1795269A1 |
| Устройство для измерения поперечного размера детали | 1990 |
|
SU1772612A1 |
| Способ определения превышения между пунктами с известными плановыми координатами | 1979 |
|
SU776177A1 |
Изобретение относится к области автоматизации строительства, а именно к автокоординированию землеройных машин и может быть использовано при проведении мелиоративных работ. Способ определения пространственного положения подвижного объекта заключается в том, что на базисном расстоянии I от первого источника светового пучка устанавливают второй источник светового пучка, формирующий плоскость, параллельную плоскости первого источника светового, пучка. Световые пучки первого и второго источников периодически меняют направление вращения. Определение координат подвижного объекта относительно источников световых пучков производят по временным интервалам ti, t2 между импульсами засветки фотоприемника, расположенного на подвижном объекте. 5 ил.
Изобретение относится к области автоматизации строительства, а именно к автокоординированию землеройных машин и может быть использовано при проведении мелиоративных работ.
Известен способ определения пространственного положения подвижного объекта. При реализации способа посредством световых пучков формируются опорные плоскости, которые регистрируются фотоэлектрической рейкой расположенной на неподвижном объекте.
Однако способ предполагает использование радиоканала, что снижает эксплуатационные характеристики устройства, работа которых основывается на этом способе.
Наиболее близким техническим решением по отношению к предложенному является способ определения пространственного положения подвижного объекта, по которому на базисном расстоянии друг от друга устанавливают два формирователя опорных лазерных плоскостей, ориентируют их друг относительно друга и определяют с помощью фотоприемного блока, установленного на транспортном средстве, его плановые и высотные координаты. При этом фотоприемник фиксирует моменты прохождения пучка излучения, которые в дальнейшем используются при обработке результатов измерений.
Однако известный способ не позволяет формировать информацию в положении объекта на самом подвижном объекте.
Целью изобретения является расширение возможностей способа путем формирования координат непосредственно на подвижном объекте.
VJ 00 00
| Јь ICJ
,01
Поставленная цель достигается тем, что вращение пучков излучения осуществляется с периодическим изменением направления вращения, причем направление вращения пучков изменяют в моменты их расположения в соответствующих отвесных плоскостях проходящих через опорные направления, а при отработке результатов измерений учитывают временные интервалы между моментами прохождения через фотоприемник каждого из пучков излучения.
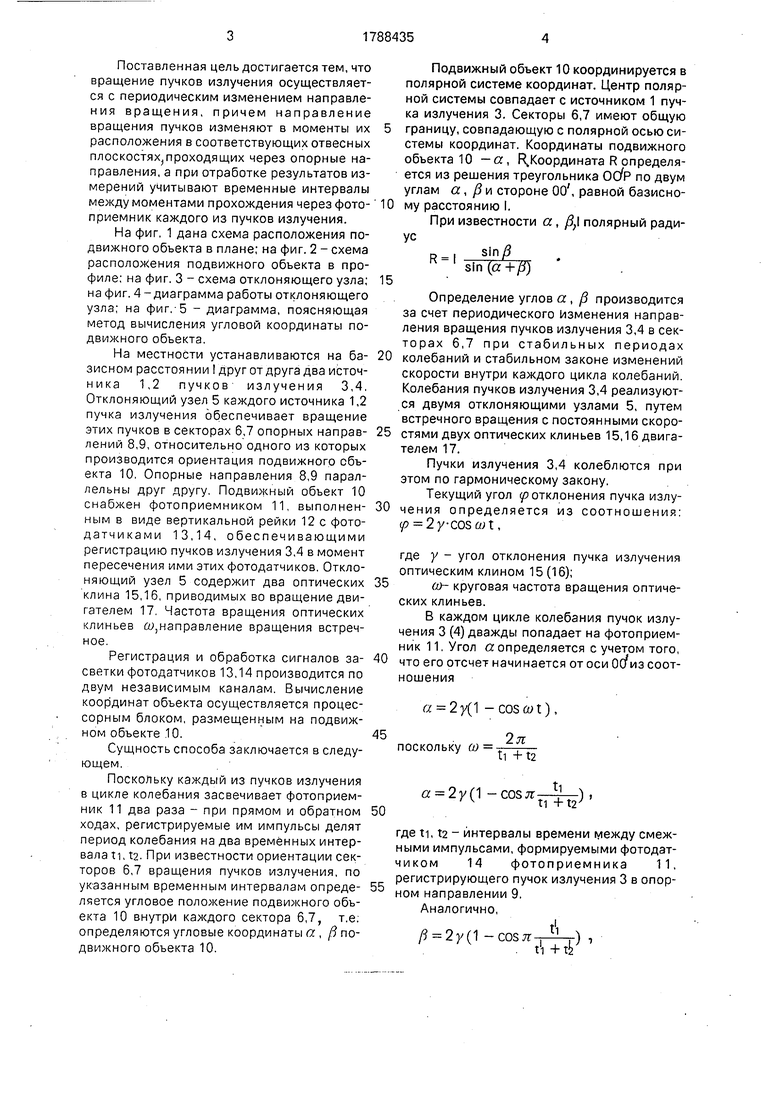
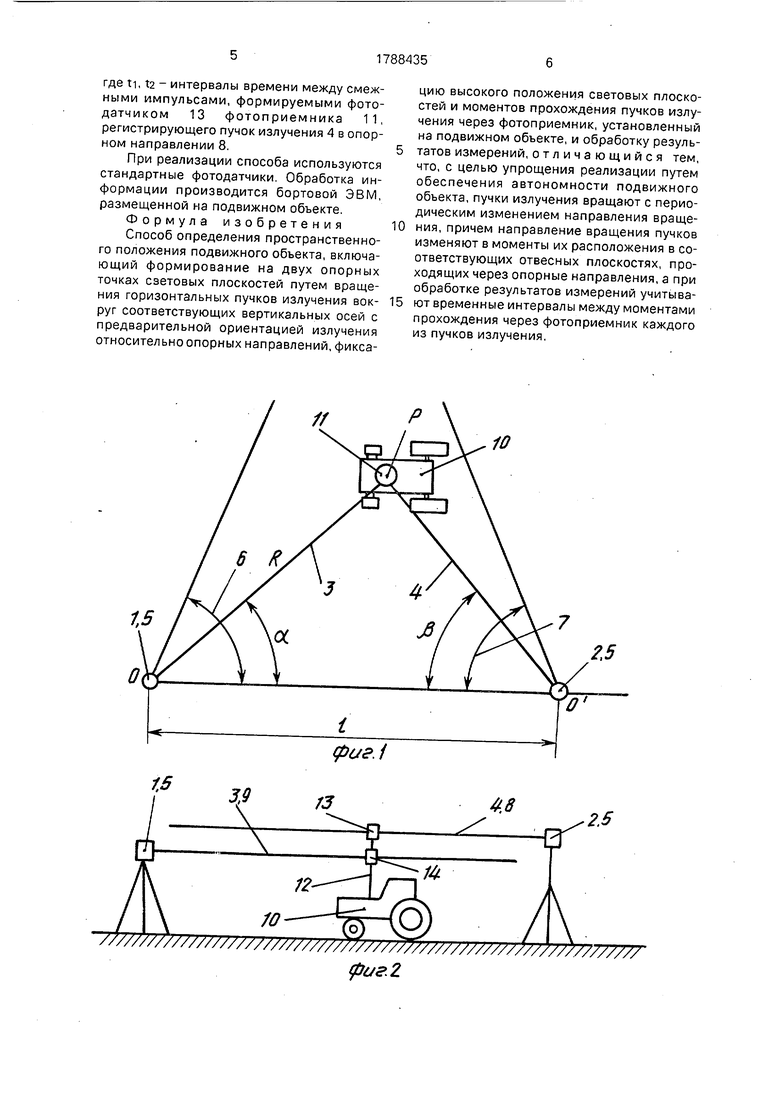
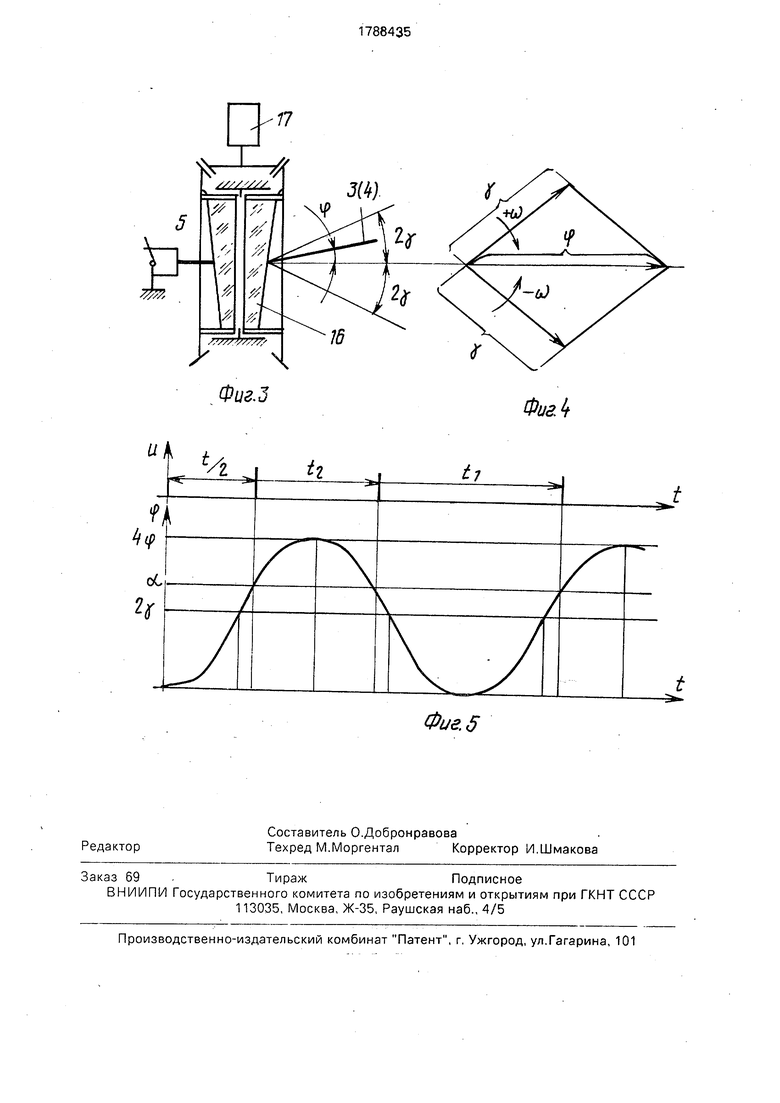
На фиг, 1 дана схема расположения подвижного объекта в плане; на фиг. 2 - схема расположения подвижного объекта в профиле; на фиг. 3 - схема отклоняющего узла; на фиг. 4 -диаграмма работы отклоняющего узла; на фиг.-5 - диаграмма, поясняющая метод вычисления угловой координаты подвижного объекта.
На местности устанавливаются на базисном расстоянии друг от друга два источника 1,2 пучков излучения 3,4, Отклоняющий узел 5 каждого источника 1,2 пучка излучения обеспечивает вращение этих пучков в секторах 6,7 опорных направлений 8,9, относительно одного из которых производится ориентация подвижного объекта 10, Опорные направления 8,9 параллельны друг другу. Подвижный объект 10 снабжен фотоприемником 11, выполненным в виде вертикальной рейки 12 с фотодатчиками 13,14, обеспечивающими регистрацию пучков излучения 3,4 в момент пересечения ими этих фотодатчиков. Отклоняющий узел 5 содержит два оптических клина 15,16, приводимых во вращение двигателем 17. Частота вращения оптических клиньев ш,направление вращения встречное.
Регистрация и обработка сигналов засветки фотодатчиков 13,14 производится по двум независимым каналам. Вычисление координат объекта осуществляется процессорным блоком, размещенным на подвижном объекте 10.
Сущность способа заключается в следующем.
Поскольку каждый из пучков излучения в цикле колебания засвечивает фотоприемник 11 два раза - при прямом и обратном ходах, регистрируемые им импульсы делят период колебания на два временных интервала ti, t2. При известности ориентации секторов 6,7 вращения пучков излучения, по указанным временным интервалам определяется угловое положение подвижного объекта 10 внутри каждого сектора 6,7, т.е; определяются угловые координаты а , fi подвижного объекта 10.
Подвижный объект 10 координируется в полярной системе координат. Центр полярной системы совпадает с источником 1 пучка излучения 3. Секторы 6,7 имеют общую границу, совпадающую с полярной осью системы координат. Координаты подвижного объекта 10 - а, Координата R определяется из решения треугольника OOP по двум углам а, /3 и стороне 00, равной базисно- 0 му расстоянию I.
При известности а, /3,1 полярный радиус
sln/З.
R l
(a+p)
Определение углов а , (5 производится за счет периодического изменения направления вращения пучков излучения 3,4 в сек- торах 6,7 при стабильных периодах
колебаний и стабильном законе изменений скорости внутри каждого цикла колебаний. Колебания пучков излучения 3,4 реализуются двумя отклоняющими узлами 5, путем встречного вращения с постоянными скоростями двух оптических клиньев 15,16 двигателем 17.
Пучки излучения 3,4 колеблются при этом по гармоническому закону.
Текущий угол отклонения пучка излучения определяется из соотношения: y 2ycoswt,
где у - угол отклонения пучка излучения оптическим клином 15 (16);
(а- круговая частота вращения оптических клиньев.
В каждом цикле колебания пучок излучения 3 (4) дважды попадает на фотоприемник 11, Угол а определяется с учетом того,
что его отсчет начинается от оси Ои из соотношения
а 2у(1 -COS Ш1),
2л поскольку (О г .
50
а 2уП -созл: 1 )
vt1 + t2
где ti, t2 - интервалы времени между смежными импульсами, формируемыми фотодат- чиком 14 фотоприемника 11, регистрирующего пучок излучения 3 в опор- ном направлении 9. Аналогично,
/ 2у(1-С057Гт-Ц-) , . ti + t2
где ti, ta - интервалы времени между смежными импульсами, формируемыми фотодатчиком 13 фотоприемника 11, регистрирующего пучок излучения 4 в опорном направлении 8.
При реализации способа используются стандартные фотодатчики. Обработка информации производится бортовой ЭВМ, размещенной на подвижном объекте. Формула изобретения Способ определения пространственного положения подвижного объекта, включающий формирование на двух опорных точках световых плоскостей путем вращения горизонтальных пучков излучения вокруг соответствующих вертикальных осей с предварительной ориентацией излучения относительно опорных направлений, фикса///////////////////////////////////////////////////////////////////
0
5
цию высокого положения световых плоскостей и моментов прохождения пучков излучения через фотоприемник, установленный на подвижном объекте, и обработку результатов измерений, отличающийся тем, что, с целью упрощения реализации путем обеспечения автономности подвижного объекта, пучки излучения вращают с периодическим изменением направления вращения, причем направление вращения пучков изменяют в моменты их расположения в соответствующих отвесных плоскостях, проходящих через опорные направления, а при обработке результатов измерений учитывают временные интервалы между моментами прохождения через фотоприемник каждого из пучков излучения.
(риг. 2
Фиг.З
Фи&Ь
Фие.5
| Устройство для топографической съемки местности | 1987 |
|
SU1504517A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
