(54) УСТРОЙСТВО ДЛЯ ПРОКЛАДКИ МАРШРУТА АДАПТИВНОГО ПРОМЫШЛЕННОГО РОБОТА

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЛОКАТОР | 2014 |
|
RU2562750C1 |
| МНОГОКАНАЛЬНОЕ ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО КОРАБЕЛЬНОГО ЗЕНИТНОГО КОМПЛЕКСА ДЛЯ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ И НАДВОДНЫХ ЦЕЛЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2406056C2 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| СПОСОБ ЮСТИРОВКИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ЛАЗЕРНОЙ ЛОКАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2120645C1 |
I
Изобретение относится к автоматизированным системам управления и может быть использовано в робототехнике в качестве устройства для прокладки маршрута адаптивного подвижного промышленного робота (АППР), обеспечивающего, например конвейерную линию.
Известно устройство ддя прокладки маршрута адаптивного промьшленного Р бота, содержащее связанный с блоком управления исполнительный орган, закрепленный на колонне, снабнданной приводом no-J ворота и датчиком угла поворота и механически связанной с платформой, снабженной движителями, а также электронно- вычислительную машину, выхо/Ш которой связаны соответственно с блоком управления исполнительным органом, со входами движителей платформы и со вхоДо при- . вода повфота колонны, причем датчик поворота колонны соединен со . вхоаом алектроннонвычислительноЙ машины Cij
Недостатками известного устройства являются узость функциональных возможностей и малая зона обслуживания робота.
Цель изобретения - установление указанных недостатков.
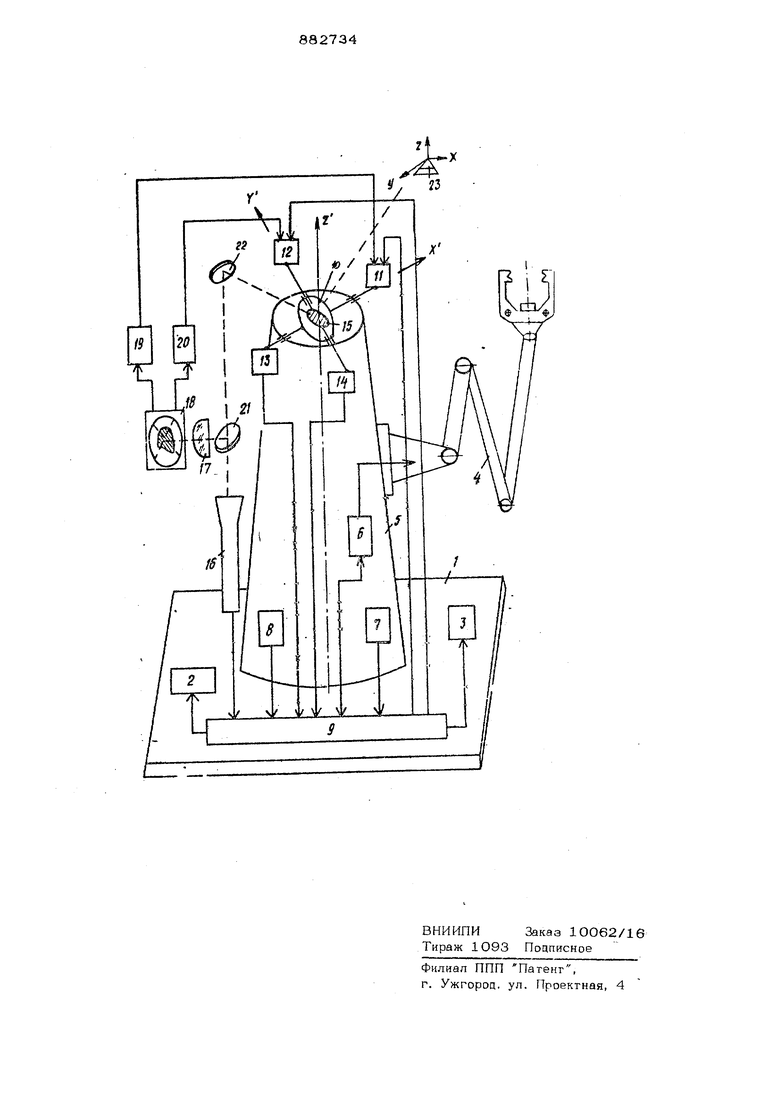
Цель достигается тем, что устройство снабжено карданным подвесом с зеркалом. и азимутальными и угломестными датчиками и приводами, лазерным дальномером, уголковым отражателем и коардинатором, состоящим из приемного объекта, многосекционного фотодатчика и азимутального н угломестного каналов управления, причем карданный подвес установлен на вершине колонны, на которой жестко закреплены лазерный дальномер и координатор, уготсовый отражатель жестко закреплен в неподвижной системе отсчета технологической зоны робота, а в косрдинаторе многосекционный фотодатчик установлен в фсжальной плоскости прием наго объектива, вькоды лазерного Дальномера ч азимутальногЪ и угломестного да чиков карданного подвеса соединены с До38полнительно введенными входами электронно-вычислительной машины, дополнительно введенные выходы которой подключены к первым входам азимутального и угпоместного приводов карданного подвеса, вторые входы которых связаны соответственно с выходами азимутального и угломестного каналов управления координатора. Кроме того, усаройство может быть снабжено дополнительными уголковыми отражателям На чертеже изображена блок-схема уст ройства. Устройство включает платформу 1, уст новленную с возможностью перемещения И снабженную движителями 2 и 3 платформы 1, обеспечивающими перемещение последней на маршрутном полотне технологической зоны робота вдоль взаимно ортогональных направлений независимо друг от друга, исполнительный орган 4 . робота, например многозвенный манипулятор с аахватньгм звеном на конце, укрепленный на колонне 5, установленной с возможностью поворота вокруг своей оси, механически связанной с платформой 1 и имеющей относительно нее степень свободы по углу поворота относительно вертикальной оси колонны 5, ортогональной плоскости платформы 1, причем исполнительньй орган робота 4 связан с блоком 6 управления исполнительного оргйна робота. Колонна снабжена приводом 7 поворота и датчиком 8 угла поворота поворотной колонны, которые электрически связаны с электронной вычислительной машиной (ЭВМ) 9, первьй выход которой подключен ко входу блока 6 управления исполнительным органом робота, а второй и тре тий выходы ее - с электрическими входами движетелей подвижной платформы 2 и 3. ЧетвертьШ выход ЭВМ 9 подключен к входу привода 7 поворота колонны 5, выход датчика 8 угла поворота который соединен с первым входом ЭВМ 9, На вершине поворотной колонны 5 укреплён карданный подвес 10, снабженный приводом 11 азимута, приводом 12 угла места, датчиком 13 азимута и датчиком 14 угла места, к которому закреплено поворотное зеркало 15. В устройство введены жесттсо закрепленные на колонне 5 лазерный дальномер 16 и координатор, состоящий из приемного объектива 17, четьфехсекционного фотоДатчнш 18, уста- новленного в фокальной плоскости приемного объектива 17, азимутального дискриминатора 19 и угломестного дискриминатора 20, входы которых соединены с вым и вторым выходами чётырехсекционного фотодатчика 18 соответственно. Оптически лазерный дальномер 16 и коор динатор связаны с поворотным зеркалом 15 через светоделительную пластину 21 и юстировочный отражатель 22 (один иди несколько в зависимости от конструкции оптического тракта передачи излучений), которые также жестко закреплены в поворотной колонне 5. Кроме того, устройство содержит уголковый отражатель 23, укрепленньй неподвижно в технологической зоне робота, например в области потолка помещения технологического участка, в котором функционирует робот. Число таких уголковьк отражателей выбирается из условий насыщенности оборудования в заданной технологической зоне|. которое способно затенить зрительный орган робота от наблюдения того или иного уголкового отражателя с данного произвольно ракурса. Работа устройства прокладки марщрута робота состоит в следующем. Положим, что система работает при одном уголковом отражателе 23, укрепленном в средней части потолка помещения, в котором функционирует робот. Местоположение этого уголкового Отражателя может описывать местоположение начала отсчета неподвижной системы координат технологической зоны робота, в которой отсчитывается местоположение так называемой базисной точки платформы 1 (какой-то специально заданной точки, например, приходящейся на точку пересечения вертикальной оси поворотной колонны 5 с горизонтальной плоскостью подвижной платформы 1). В этой же системе отсчета заданы координаты объектов работы и их ориентация в пространстве. Эти Данные заложены в оперативной памяти ЭВМ 9 на этапе обучения робота. В оперативной памяти ЭВМ 9 записан TaicHce атггоритм работы робота в форме перечня и последовательности совершаемых роботом операций, а также содержатся сведения о предпочтительном маршруте движения робота от одного объекта работы к другому в заданной технологической зоне робота. Прокладка маршрута своди-Рся при этом к измерению текущего распо:ложения базисной точки робота в пространстве на основе измерения азимута и угла места линии визирования от базисной точки АППР до уголкового отражателя 23, а также к измерению наклонной дальнооти между базисной точкой АГШР и этим уголковым отражателем, что позволяет 58 с помощью ЭВМ 9 рассчитать текущие координаты базисной точки АППР, а,следовательно, определить величины управляющих воздействий от ЭВМ 9 на движители 2 и 3 подвижной платформы для осу ществления заданного маршрутного перем щения подвижной платформы 1 между обь.ектами работы. При возникновении на мар шруте следования робота непре; смотренных препятствий робот совершает запрограммированный в ЭВМ 9 обходаой маневр для преодоления данног.о препятствия и стремится возвратиться к исходаюму марш руту на основе решения этой задачи в ЭВМ 9, к которой п оступает информация о препятствиях по каналам сенсорного вос приятия, например, сенсорным каналам сигнализации возможного столкновения робота с препятствием (в сенсорной системе робота при этом могут быть использованы тактильно-чувствительные усьГ укрепленные на периферии платформы 1 и снабженные тензодатчиками или датчиками моментов изгиба усов). Сведение текущего маршрута движения робота с записанным в оперативной памяти ЭВМ 9 маршрутом (так назьшаемом эталонном маршрутом) осуществляется путем решения соответствующей навигационной задачи в ЭВМ 9 на основе критериев минимизаций функционала рассогласования. Алгоритм движения робота по эталонному маршруту осуществляется в отсутствии препятствий - на пути следования робота по программе, предварительно записанной в оперативную память ЭВМ 9. Однако до выхода робота на заданньй маршрут необходимо осуществить привязку координат базисной точки робота к координатной системе пространства объек тов работы с началом отсчета этой системы в точке расположения уголкового отражателя 23. При автономной работе робота реализуется алгоритм поиска угол кового отражателя 23 зрительной системой робота, Для этого с пятого и шестого вькодов ЭВМ 9 на вторые входы привода азимута 11 и привода 12 угла места карданного подвеса Ю подаются соответствующие управляющие си1Ч1алы, обеспечивающие режим сканирования поворотного зеркала 15 с заданным темпом угловой скорости перемещения линии облучения (линии визирования), создаваемого включенным лазерным дальномером 16. Излучения последнего, отражаясь от юстировочного отражателя 22 и поворотного зеркала 15, сканируют узким световым лучом технологическое простран 4 ство до совмещения линии облучения с линией визирования на уголковый отражатель 23, Проведенной между точкой крепления последнего и точкой падения луча лазерного дальномера 16 на подвижное зеркало 15. Когда такое совмещение происходит с достаточной степенью точности, лазерные излучения, отражаясь от уголкового отражателя 23, возвращаются точно в таком же направлении к подвижнол у зеркалу 15, от него через юстировочный от ражатель 22 и светоделительную пластину 21 попадают на координатор. В последнем возвращенные излучения лазерного дальномера 16 фокусируются приемным объективом 17 и в виде сфокусированного светового пятна засвечивают фоточувствительную поверхность четьфехсекционного фстодатчика 18. В зависимости от степени разбаланса углового положения поворотного зеркала 15 от положения, при котором имеет место точное совмещение линии визирования уголкового отражателя 23 с лучом лазерного дальномера 16, переотраженным от поворотного зеркала 15 в направлении к уголковому отражателю 23, форма указанного светового пятна, величина и направление его смещения на фоточувствительной поверхности четьфехсекционного фотодатчика 18 будут испытывать соответствующие вариации. Это приведенное к четьфехсекциоиному фотодатчику 18 лазерное излучение разделится в нем в общем случае на четъфе неравные доли. Структура четьфехсекционного фотодатчика 18 такова, что оппозитнъю пары его секторов образуют два независимък дифференциальных канала-азимутальный и угпоместный. В каждом канале секторы фотодатчика включены на общую нагрузку этого канала по схеме въгчитанкя сигналов, образующихся в виде фотоотк-лика в соответствующих секторах фотодатчика. Это приводит к возбуждению на выходе каждого из указаннък каналов электрических напряжений постоянного тока (для непрерывных излучений лазерного дальномера 16), величина и знак которых определяется величиной и направлением отклонения светового пятна на фоточувствительной поверхности четьфехсекционного фотодатчи- ка 18 от центрально-симметричного по ложения, В случае амплитудно-модупированньк излучений лазерного дальномера 16 с частотой модулирующих колебаний,существенно более низкой по сравнению с верхней граничной частотой фотодетектирований в четьфехсекционном фотодат7чике 18, выполненном на основе монокристаллов кремния с малыми значеннямн времени релаксации фотоэлектронных состо5ШИй, на вьрсоДах указанных каналов четырехсекдионного фотодатчика 18 будут образовываться переменные напряжения (с частотой модулирующих свет ко лебаний), амплитуда и фаза которьк такж определяется величиной и направлением смещения светового пятна на апертуре .четьгрехсекционного фотодатчика 18. Фазы этих колебаний могут в этом случае принимать два значения: О или 180®по отношению к опорному колебанию модулирующей частотьГГкоторое вырабатьшается генератором, входящим в состав лазерного дальномера. При вариации дальности до уголкового отражателя 23 от зрительного органа АППР (в частности, от поворотного зеркала 15) интенсивность засветки четьфех секционного фотодатчика 18 будет соответственно изменяться, следовательно, бу дет изменяться и величина фотооткликов каждого из освещенных лазерным, излучением секторов четырехсекционного фотодатчика 18. Последнее вызовет соответствующее изменение в величинах сигналов на азимутальном иг угломестном выходах четырехсекционного фотодатчика 18 что нежелательно, поскольку тако измене ние будет приводить к вариации передаточной характеристики в следящей системе. Для исключения этого нежелательного явления выходные сигналы четырехсекционного фотодатчика 18 нормируют в функции от интегральной освещенности каждой из соответствующих пар секторов четьфех секционного фотодатчика 18 лазерным излучением. Нормирующий сигнал образуется суммированием фотооткликов соответствующей пары секторов четьфехсекционного фотоДа чика 18 для каждого из каналов последнего - азимутального и угломестного. Нормирование дифференциального (разност ного) сигнала в каждом из указанных каналов осуществляется раздельно в азимутальном 19 и угломестном 20 дискриминаторах координатора. При нормировании образующийся в данном канале дифференциальный сигнал относят к величине нормирующего сигнала этого же канала. Поскольку разность двух положительных величин всегда меньше суммы этих величин, то результат указанного отношения представляет собой нормированную величину в пределах от минус единицы До плюс еди34Если лазерные излучения лазерного Дальномера 16 промодулированы по ам-: плитуде, то в состав азимутального 19 и угломестного 20 дискриминаторов координатора входят синхронные демодуляторы, каждый из которых связан дополнительно (по их опорному каналу) с генератором опорного напряжения, входящим в состав лазерного дальномера 16 (соответствующие связи методу лазерным дальномером 16 и азимутальным 19 и угломестным 2О дискриминаторами на чертеже не указаны). Использование амплитудно-модупированных лазерных излучений обладает тем преимуществом, что оно обеспечивает существенное увеличение динамического диапазона четьфехсекционного фотодатчика 18 путем ликвидации мешающего действия на последний фоновой засветки, образующейся в диффузно освещенной технологической зоне робота. Кроме того, при таком способе построения следящей системы возможно увеличение точности ее работы и повьпдение ее быстро действия. Отфильтрованные, нормированные и усиленные До необходимого уровня сигналы азимутального и угломестного каналов поступают с выходов азимутального 19 и угломестного 20 дискриминаторов координатора на первые входы привода 11 азимута и привода 12 угла места карданного подвеса 10, в результате чего поворотное зеркало 15 удерживает требуемое угловое положение в пространстве, независимо от фактора перемещения под вижной пла-гформы 1 в технологической зоне робота и от фактора врашения поворотной колонны 5. При перемещении подвижной платформы 1 и при вращении поворотной колонны 5 естественно меняется угловое положение повсфотного зеркала 15 так, что поддерживается с необходимой точностью совмещение линии ви-. зирования на уголковый отражатель 23 и оси излучения лазерного Дальномера 16, переотраженного поворотным зеркалом 15 в направлении уголкового отражателя 23. . Быстродействие следящей системы с оординатором Должна быть таким, чтобы спевать удерживать поворотное зеркао 15 в требуемом угловом положении ак при экстремальных параметрах движения робота, включая и вибрации последего на неровностях маршрутного попот а, вибрации, возникающие при резких толчках робота при трогании и остановке го, так и при осуществлении режима поиска уголкового отражателя 23 путем праграммируемого в ЭВМ 9 сканирования поворотного зеркала 15 при подведении на вторые входы привода азимут 11 и привода 12 угпа места карданного подвеса 1О соответствующих сигналов сканирования. В последнем режиме работы следящей системы с координатором темп изменения сигналов сканирования доп«ен быть ниже темпа сигналов, образующихся на соответствующих вьосодах азимутального 19 и угломестного 2О дискриминаторов координатора в момент замыкания петлн оптико-электронной следящей связи (когда лазерное излучение под действием сканирования воздействует на апертуру уголковсяг-о отражателя 23). Это условие определяет возможность захвата следящей системой с коорднна тором уголкового отражателя 23, после осуществления которого сканирование поворотного зеркала 15 прекращается, а программа сканирования в ЭВМ 9 автоматически отключается. В случае потери уголкового отража теля 23 следащей системой с координатором, например, при возникновении силь ной вибрации робота, последний останавливается по команде с ЭВМ 9 и в ЭВМ 9 вновь включается программа сканирова ния поворотного зеркала 15 для поиска уголкового отражателя 23 и привязки к координатной системе технологической зоны робота. Однако в этом случае в па мяти ЭВМ 9 уже имеются сведения о предлагаемом местонахождении робота и уголкового отражателя 23. Это позволяет существенно ограничить зону сканирования поворотным зеркалом 15 в некотором телесном угле, биссектриса которого - суть линия визирования уголкового отражателя 23, положение которой было зафиксировано в памяти ЭВМ 9 до момента потери уголкового отражателя 23, Снижение величины телесного угла сканирования поворотного зеркала 15 в этом случае приводит к существенному уменьшению времени поиска уголкового отражателя 23, что практически не вызывает скольког-нибудь заметной задержки в движении робота, по заданному марщ руту. Если потеря связи с уголковым отражателем 23 .произошла не под действием сильньк вибраций робота, а в результате затенения уголкового отражателя 23 каким-либо препятствием (крупногабаридным оборудованием, размещенным в технологической зоне робота, нёпредусмотренным препятствием на маршрутном 410 пути, перекрывающим оптическую связь между лазерным дальномером и уголковым отражателем 23), то осуществление программы поиска потерянного уголко. BCffo отражателя бесполезно. При этом по ;команде ЭВМ 9 система поиска с координатором и поворотным зеркалом 15 переключается на реализацию программы поиска другого уголкового отражателя технологическсй зоны робота, местополо. жение которого заранее известно и закодировано в оперативной памяти ЭВМ 9. Именно с целью обеспечения бесперебойной работы робота в условиях значительнаго загромождения технологической зоны робота крупногабаритными приборами, станками и возможными непредусмотрен Аг1ыми препятствиями,и рекомендуется дополнительно снабжать технологическую зону робота несколькими уголковыми отражателями типа уголкового отражателя 23, взаимно, рассредоточенными в пространстве. Местоположение каждого из таких уголковых отражателей записано в память ЭВМ 9. Сами уголковые, отражатели играют роль геодезических реперньк меток в заданной системе координат пространства объектов работы. По любому из TaKiix реперов робот может осуществлять привязку в заданной координатной системе Если по какой-либо причине зрительный орган оказывается слепым по отношению ко всем установленным в технологической аске робота уголковым отражателям (например, при близком распо ложении препятствия от выходной апертуры поворотного зеркала 15), программой ЭВМ 9 может быть предусмотрен произвольный маневр АППР в какую-либо сторону от заданного маршрута (как при осуществлении программы обхода препятствий) до тех пор, пока не восстановятся условия для реализации npoi-раммы поиска одного из уголковьк отражателей -технологической зоны робота. При реализации такого поиска, время поиска естественно увеличивается, однако вероятность наступления такого события, как полное затенение зрительной системы робота, тем меньше, чем большее число уголковых от ражателей будет использовано в заданной технологической зоне робота. Выбор конкретного числа УГОЛКОВЫХ отражателей и нх рассредоточение в пространстве определяется конкретными условиями. Для относигепьно свободных и не очень больших, помещений достаточно использовать одвн уголковый отражатель, укрепленный в цеftip помещения на его потолочной части. При увеличении размеров помещения могут быть использованы три уголковых отражателя, установленные на потолошой части помещения и расположенные, напри мер, в вершинах вписанного в окружность равностороннего треугольника (для квадратных помещений) или вписанного в элпипс равнобедренного треугольника (для прямоугольньк помещений с существенно неравными длинами сторон), В некоторых случаях могут использоваться уголковые отражатели, размещаемые на самом оборудовании технологической зоны робота при стационарном размещении такого оборудования и при их больших габаритах и рас попожении вблизи маршрута следования АППР. Выбор базисной точки подвижной платформы 1, горизонтируемой в заданной сис теме координат специальными техническими средствами предпочтителен на оси вра щения поворотной колонны 5. В качестве такой точки целесообразно выбрать точку переотражения лазерного излучения на поворотном зеркале 15, лежащую на вер тикальной оси вращения поворотной колонны 5, Поскольку именно эта точка образует геометрический луч - линию визирования уголкового отражателя 23. Это позволяет элементарным путем найти и координаты точки, лежащей на neffece4e - НИИ оси вращения поворотной колонны 5 с осью вращения первого звена исполнительного органа робота 4, которое крепит последний к поворотной колонне АППР, С учетом угла поворота поворотной колон . ны 5 в собственной системе координат АППР, измеряемого датчиком угла поворота 8, а также с учетом текущих значений углов поворота и перемещений всех звеньев исполнительного органа робота 4, включая и его конечное звено захватное звено, измеряемых соответствующими датчиками, установленными в звеньях исполнительного органа робота 4 (эти датчики не указаны на чертеже), легко рассчитывается ориентация исполнительного органа робота 4, в том числе и ориентация захватного его звена, в собственной системе координат АППР. Ориентация захватного звена исполнительного органа робота 4 не в системе координат робота, в пределах которой расположение исполнительного органа робота 4 может быть строго определено расчетным путем (в ЭВМ 9), а в неподвижной системе координат для пространства объектов работы. Между тем применительно 4 к неподвижной системе координат данные измерений местоположения в ней базис ной точки робота с yieToM горизонтирования подвижной платформы 1 при работе робота позволяют только точно задать положение одной из осей подвижной системы координат робота (то есть его собственной системы отсчета). Это касается положения вертикальной оси вращения поворотной колонны 5. Положение других осей собственной системы координат робота в неподвижной системе координат пространства объектов работы требует дополнительного доопределения. Необходимо определить величину угла поворота осей собственной системы координат робота, расположенных в горизонтальной плоскости, относительно соответствующих осей неподвижной ристемы координат пространства объектов работы. Для определения этого угла необходимо определить не одну точку, принадлежащую подвижной платформе 2, а две ее разные точки по их местоположению в неподвижной системе координат, связанной с технологической зоной робота. Иначе говоря, знания координат только базисной точки робота недостаточно для задания ориентации подвижной платформы 1 относительно пространства объектов работы. Рещение задачи об определении ориентации подвижной платформы 1 в неподвижной системе координат технологической зоны робота может быть найдено с учетом определения местоположения в этой системе координат базисной точки робота для двух различных пространственнъгх положений, переход из одного положения в другое для которък осуществлялся бы вдоль прямой ЛИНИИ, коллинеарной с одной из координатнък осей, принадлежащих горизонтальной плоскости собственной системы координат. При этом достаточно строгое решение задачи привязки подвижной системы координат подвижной плат. формы 1 требует задания перемещения робота с помощью только одного какого-либо движителя 2 или 3 подвижной платформы 1. При этом координаты базисной точки для любых двух произвольных, положе-ний (перемещенного вдоль одной из координатных осей собственной системы координат) всегда определяют положение проходящей через эти точки прямой линии Которая составляет, в общем случае, некоторые углы с осями координат неподвижной системы координат пространства объектов работы, также лежащими в горизонтальной плоскости этой неподвижной системы отсчета. Поскольку указанная прямая , линия коллинеарна оцной из координатных осей подвижной системы координат, вдоль которой и осуществлялось контрольное перемещение робота, то пег- ко рассчитьтается угол поворота координатньс: осей подвижной системы координат . относительно тех же осей для неподвижной системы координат пространства объектов работы, то есть определяется ориентация подвижной платформы 1 в этой неподвижной системе отсчета. При этом вертикальные оси систем координат (под вижной и неподвижной) коплинеарны, что обеспечивается горизонтированием подвижной платформы 1.,. Рассмотренный метод определения ори ентации подвижной платформы 1 реализуется при движении робота на маршрутном полотне. ФактЕ движения робота, при ко; тором имеют место вибраций поворотной колонны 5, вносит в ориентационные расчеты определенные ошибки, поэтому ориентация подвижной платформы на ходу не всегда дает достаточную точность, требуемую для функцисмирования исполнительного органа робота 4 относительно заданного объекта работы. Поэтому было бы предпочтительно доопределять ориента цию подвижной платформы 1 после остановки робота у объекта работы. В неподвижном состоянии АППР отсутствуют ви брации поворотной колонны 5, что позвол ет с учетом коррекции горизонтирования подвижной платформы 1 рассчитывать координаты базисной точки АППР с удовлет ворительной точностью. Соответствующие выражения для координат базисной точки АППР (центральной точки поворотного зе кала 1 имеют следующий вид j(,oseotosfbo o 1 Ч tD cos EOS ( 1 r D8in6o -2o I где X, .- координаты базисной точки АППР в неподвижной системе координат пространства объектов работы, Xoi gMZg- координаты установки уголкового отражателя 23 (если по следний помещен в точку начала отсчета неподвижной сие темы координат пространства объектов работы, то Хл5 о ), « 34 и to соответственно азимут и угол места линии визирования уголкового отражателя, отсчитываемые в неподвижной координат пространства объектов работы, 31 - наклейная дальность (расстояние между апертурой уголкового отражателя 23 и точкой переотражения лазерного излучения на поворотном зеркале 15. Соответствующие переменные параметры - азимут и угол места, входящие в систему (1) , непосредственно не измеряются с помощью зрительной системы АППР, а измеряются лищь утлы наклона попоротного зеркала 15 относительно осей координат собственной системы координат АППР, лежрздих в горизонтальной плоскости этой системы - углы наклона )( и , значения которък однозначно определяют величины азимута (ЪдИ места линии визирования, то есть имеет место однозначная функциональная связь указанных углов fxrfffbo,o); fy-(%,fo.«ib (J где и - некоторые функции от измеряемых параметров и угла поворота et поворотной колонны 5 относительно выбранного за исходное направления на подвижной платформе 1 (например направления, совпадающего с одной из осей собственной системы координат подвижной платформы 1, причем эта ось лежит в горизонтальней плоскости системы отсчета АППР). Значение уздаов |yi,|J и oL измеряются соответственно датчиком 13 азимута,, датчиком 14 угла места карданного подвеса Ю и датчиком 8 угла поворота поворотной колонны 5. Входящее в выражение (1) значение наклонной дальности D измеряется лазерным дальномером 16. Указанные измеряемые величины поступают на соответствующие входы ЭВМ 9, где в соответствии с выражениями (1) и (2) рассчитываются значения координат базисной точки АППР, с учетом поворота колонны 5, то есть с учетом двух . различных: значений угловсК например. О и oL 18d). Техническо-экономическая эффективность предлагаемого технического рещения определяется высокой маневренностью и простотой использования АППР в любък заранее не подготовленных производственных помещениях, цехах конвейерньсс линий и даже вне производственных помещений, поскольку ттри этом совершенно не требуется оснащать такие площадки специаль ной сетью кондукторов, то есть не требуется производить коммуникационные работы по оборудованию площадок работы АППГ, затрачивать дополнительные сред ства на проведение таких работ. Вместо всего этого, в зоне действия следует лишь укрепить уголковый отражатель .(один или несколько в зависимости от площади, обслуживаемой АППР, и загруженностью площадки крупногабаритным оборудованием). Навигация АППР по угол ковому отражателю перспективна, посколь ку позволяет совершать обход различных препятствий и адаптироваться к заранее непредусмотренной обстановке. Формула изобретения Устройство для прокладки маршрута адаптивного промьпдленного робота, содержащее связанный с блоком управления исполнительный орган, закрепленный на колонне, снабженной приводом поворота и датчиком угла поворота и связанной с платформой снабженной движителями, i а также электронно-вычислит льйую машину, выходы которой связаны сосАветственно с блоком управления исполнитель ным opraHoivf, со входами движителей пла формы и со входом привода поворота колонны, причем Датчик угла поворота колонны соединен со входом электронно вы числительной машины, отлйчающ е 4 16 с целью расширения вся, тем, что, фумкцвсжальных возможностей устройства, оно снабжено карданным подвесом с зеркалом и азимутальными и угломестеымк Датчиками и приводами, лазерньо 4 дальномером, уголковым отражателем и координатором, состоящим из приемного объектива, многосекцишного фотодатчика и аэиtйyгaльнoгoи угломестного каналов управленения, причем карданный подвес установлен на вершине колонны, на которой жестко закреплены лаэерньй дальномер и .координатор, уголковый отражатель жестко закреплен в неподвижной системе отсчета технологической зоны робота, а в координаторе многосекционный фотодатчик установлен в фокальной плоскости приемного объектива, выходы лазерного дальномера и азимутального и угломестаого датчиков карданного подвеса соединены с дополнительно введенными входами электронновычислительной машины, дополнительно введенные выходы которой подключены к первым входам азимутального и угломестного приводов карданного подвеса, вторые входы которых связаны соответственно с выходами азимутального и угломестного каналов управления координатора. 2. Устройство по п. 1 отличающ е е с я тем, что, с целью увеличения зоны обслуживания, оно снабжено дополнительными уголковыми отражателями. Источники информации, принятые во внимание при экспертизе 1. Робог, перевод ВИНИТИ № Ц-53634- Ц-53649, 1974.
