Изобретение относится к медицинской технике, а именно к травматологии и ортопедии.
Целью изобретения является обеспечение удлинения конечности на различных уровнях с возможностью устранения ее угловых деформаций,
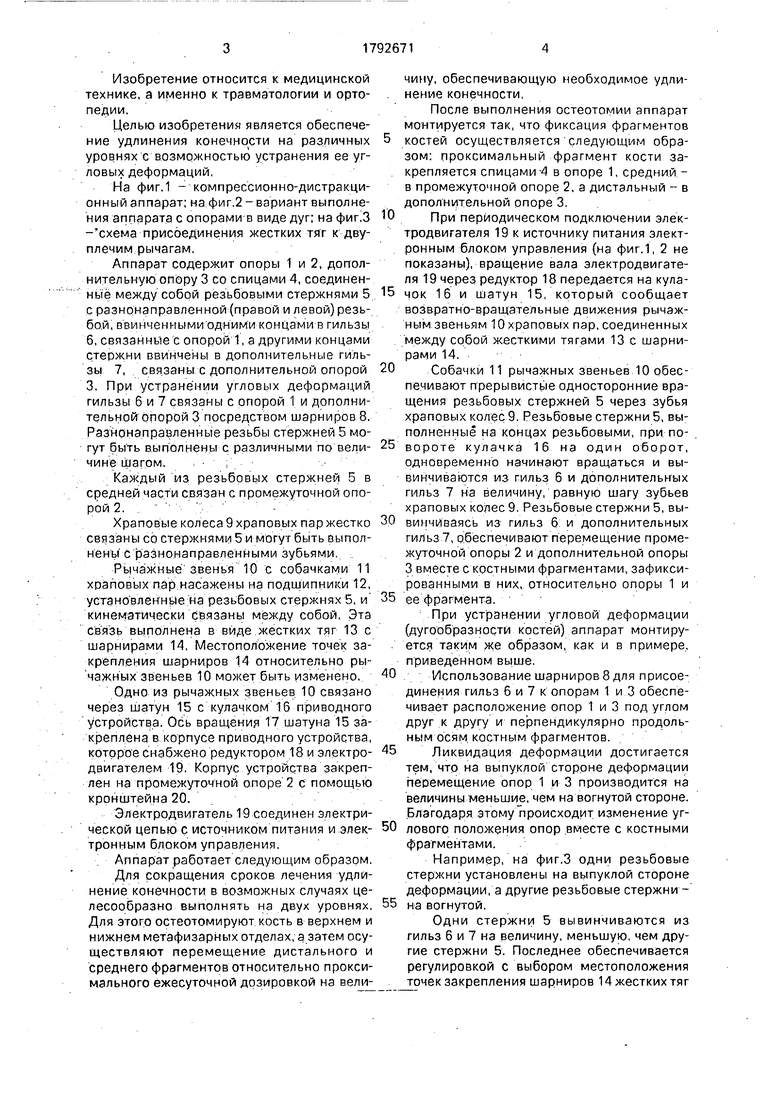
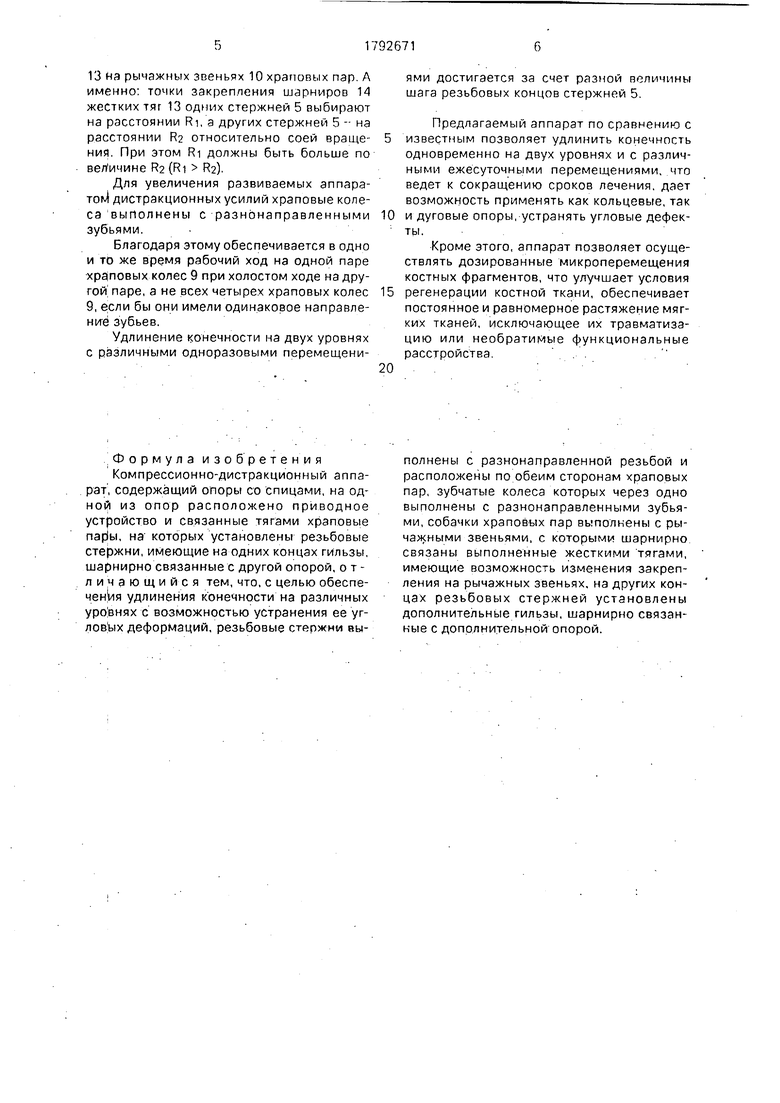
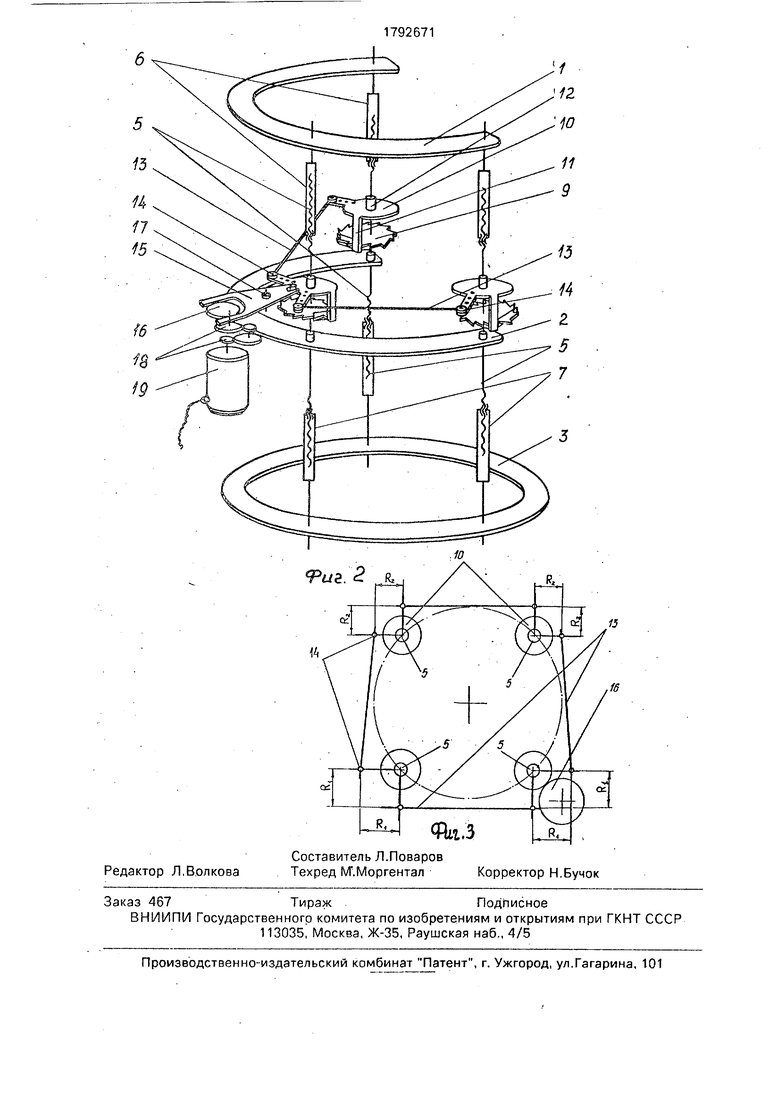
На фиг.1 - компрессионно-дистракци- онный аппарат; на фиг.2 - вариант выполнения аппарата с опорами в виде дуг; на фиг.З - схема присоединения жестких тяг к дву- плечим рычагам.
Аппарат содержит опоры 1 и 2, дополнительную опору 3 со спицами 4, соединенные между собой резьбовыми стержнями 5 с разнонаправленной(правой и левой) резь- бо.й, ввинченными одним и концами в гильзы б, связанные с опорой 1, а другими концами стержни ввинчены в дополнительные гильзы 7, связаны с дополнительном опорой 3. При устранении угловых деформаций гильзы 6 и 7 связаны с опорой 1 и дополнительной опорой 3 посредством шарниров 8. Разнонэправленные резьбы стержней 5 могут быть выполнены с различными по величине шагом. ; .
Каждый из резьбовых стержней 5 в средней части связан с промежуточной опорой 2. . .Храповые колеса 9 храповых пар жестко связаны со стержнями 5 и могут быть выпол- ненУс разнонаправленными зубьями.
Рычажные звенья 10 с собачками 11 храповых пар насажены на подшипники 12, установленные;йа резьбовых стержнях 5, и кинематически связаны между собой. Эта связь выполнена в виде жестких тяг 13 с шарнирами 14. Местоположение точек закрепления шарниров 14 относительно рычажных звеньев 10 может быть изменено.
Одно из рычажных з;веньев 10 связано через шатун 15 с кулачком 16 приводного устройств.а. Ось вращения 17 шатуна 15 закреплена в корпусе приводного устройства, которое снабжено редуктором 18 и электродвигателем 19, Корпус устройства закреплен на промежуточной опоре 2 с помощью кронштейна 20.
Электродвигатель 19 соединен электрической цепью с источником питания и электронным блоком управления. . Аппарат работает следующим образом.
Для сокращения сроков лечения удлинение конечности в возможных случаях целесообразно выполнять на двух уровнях. Для этого остеотомируют кость в верхнем и нижнем метафизарных отделах, а затем осуществляют перемещение дистального и среднего фрагментов относительно прокси- мального ежесуточной дозировкой на величину, обеспечивающую необходимое удли- . нение конечности,
После выполнения остеотомии аппарат монтируется так, что фиксация фрагментов
костей осуществляется следующим образом: проксимальный фрагмент кости закрепляется спицами 4 в опоре 1, средний - в промежуточной опоре 2, а дистэльный - в дополнительной опоре 3.
При периодическом подключении электродвигателя 19 к источнику питания электронным блоком управления (на фиг.1, 2 не показаны), вращение вала электродвигателя 19 через редуктор 18 передается на кула5 чок 16 и шатун 15, который сообщает возвратно-вращательные движения рычажным звеньям 10 храповых пар, соединенных между собой жесткими тягами 13 с шарнирами 14.
0 Собачки 11 рычажных звеньев 10 обеспечивают прерывистые односторонние вращения резьбовых стержней 5 через зубья храповых колес 9. Резьбовые стержни 5, выполненные на концах резьбовыми, при по5 вороте кулачка 16 на один оборот, одновременно начинают вращаться и вывинчиваются из гильз 6 и дополнительных гильз 7 на величину, равную шагу зубьев храповых колес 9, Резьбовые стержни 5, вы0 винчиваясь из гильз 6: и дополнительных гильз 7, обеспечивают перемещение промежуточной опоры 2 и дополнительной опоры 3 вместе с костными фрагментами, зафиксированными в них, относительно опоры 1 и
5 ее фрагмента.
: При устранении угловой деформации (дугообразное.™ костей) аппарат монтиру- . ется таким же образом, как и в примере, приведенном выше.
0 Использование шарниров 8 для присоединения гильз 6 и 7 к опорам 1 и 3 обеспечивает расположение опор 1 и 3 под углом друг к другу и перпендикулярно продольным осям, костным фрагментов.
5 Ликвидация деформации достигается тем, что на выпуклой стороне деформации перемещение опор 1 и 3 производится на величины меньшие, чем на вогнутой стороне. Благодаря этому происходит изменение уг0 левого положения опор вместе с костными фрагментами.
Например, на фиг.З одни резьбовые стержни установлены на выпуклой стороне деформации, а другие резьбовые стержни 5 на вогнутой.
Одни стержни 5 вывинчиваются из гильз 6 и 7 на величину, меньшую, чем другие стержни 5. Последнее обеспечивается регулировкой с выбором местоположения точек закрепления шарниров 14 жестких тяг
13 на рычажных звеньях 10 храповых пар. А именно: точки закрепления шарниров 14 жестких тяг 13 одних стержней 5 выбирают на расстоянии RI, а других стержней 5 - на расстоянии R2 относительно соей вращения. При этом RI должны быть больше по величине R2 (Ri R2).
Для увеличения развиваемых аппаратов дистракционных усилий храповые колеса выполнены с разнонаправленными зубьями.
Благодаря этому обеспечивается в одно и то же время рабочий ход на одной паре храповых колес 9 при холостом ходе на другой паре, а не всех четырех храповых колес 9, если бы они имели одинаковое направление зубьев.
Удлинение конечности на двух уровнях с различными одноразовыми перемещениями достигается за счет разной величины шага резьбовых концов стержней 5.
Предлагаемый аппарат по сравнению с
известным позволяет удлинить конечность одновременно на двух уровнях и с различными ежесуточными перемещениями, что ведет к сокращению сроков лечения, дает возможность применять как кольцевые, так
и дуговые опоры, устранять угловые дефек- ты.
Кроме этого, аппарат позволяет осуществлять дозированные микроперемещения костных фрагментов, что улучшает условия
регенерации костной ткани, обеспечивает постоянное и равномерное растяжение мягких тканей, исключающее их травматиза- цию или необратимые функциональные расстройства.
. :
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ДИСТРАКЦИОННОГО КОСТНОГО РЕГЕНЕРАТА | 2003 |
|
RU2264796C2 |
| Компрессионно-дистракционный аппарат | 1983 |
|
SU1122308A1 |
| УСТРОЙСТВО ДЛЯ УДЛИНЕНИЯ НЕРВНЫХ СТВОЛОВ | 2001 |
|
RU2207812C2 |
| Компрессионно-дистракционный аппарат | 1986 |
|
SU1750666A1 |
| Аппарат Г.А.Илизарова для чрезкостного остеосинтеза | 1981 |
|
SU1055499A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Компрессионно-дистракционныйАппАРАТ | 1979 |
|
SU848011A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ПОСТТРАВМАТИЧЕСКОГО ГОНАРТРОЗА | 2002 |
|
RU2282412C2 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1993 |
|
RU2084203C1 |
| Компрессионно-дистракционный аппарат г.а.илизарова | 1974 |
|
SU538710A1 |

Формула изобретения Компрессионно-дистракционный аппарат, содержащий опоры со спицами, на одной из опор расположено приводное устройство и связанные тягами храповые пар ы, на которых установлены резьбовые стержни, имеющие на одних концах гильзы, шарнирно связанные с другой опорой, отличающийся тем, что, с целью обеспе- удлинения конечности на различных уро внях с возможностью устранения ее уг- лов ых деформаций, резьбовые стержни выполнены с разнонаправленной резьбой и расположены по обеим сторонам храповых пар, зубчатые колеса которых через одно выполнены с разнонаправленными зубьями, собачки храповых пар выполнены с рычажными звеньями, с которыми шарнирно связаны выполненные жесткими тягами, имеющие возможность изменения закрепления на рычажных звеньях, на других концах резьбовых стержней установлены дополнительные гильзы, шарнирно связанные с дополнительной опорой.
Составитель Л.Поваров Редактор Л,ВолковаТехред М.Моргентал Корректор Н.Бучок
Заказ 467Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035 Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
| Компрессионно-дистракционный аппарат | 1986 |
|
SU1732956A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
