Изобретение относится к измерительной технике и может быть использовано для автоматизации производственных процесс сов , в частности для систем позиционирований крупных машин И механизмов в прцкзтном производстве.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее осветитель, оптоэлек- тронный сканатор, расположенную между ними установленную на объекте непрозрачную заслонку, подключенный к сигнальному выходу сканатора формирователь видеосигнала, последовательно соединенные ключ, запоминающее устройство и индикатор, причем информационный вход ключа соединен с координатным выходом сканатора, а управляющий вход ключа - с выходом фор- мирбвания видеосигнала.
Недостатком прототипа являемся низкая точность, вызванная тем, что при некон- тролируемых перемещениях объекта (поворот и поперечные перемещения в направляющих вследствие зазора) одновременно меняется положение жестко связанной с ней заслонки. Она отклоняется от оси Oi02, при этом меняются масштаб преображения и показания датчика. Другой причиной потери точности являются история объектива и геометрическая нелинейность сканатора, т.к. контролируемый край заслонки перемещается в пределах всего пдля зрения 001 сканатора. Вторым недостатком прототипа является недостаточная метрологическая надежность, т.е. неконтролируемое увеличение погрешности измерения выше допустимой в процессе работы
Х|
Ю
А Ю
VJ
атчика в период между его поверками в вязи с тяжелыми условиями эксплуатации. Известно применение в оптоэлектрон- ных измерительных системах блоков автоатического определения достоверности информации, с помощью которых на фотоэлектронный преобразователь периодичеки с помощью дополнительной оптической системы проектируется образцовое изобраение, производится его анализ, определение достоверности измерительной информации и внесение при необходимости поправок. Такой способ определения достоверности информации сложен и не обеспечивает необходимой метрологической надежности, т.к. не охватывает участок измерительного тракта от заслонки до скана- тора, на котором наиболее вероятно возникновение помех вследствие тяжелых внешних условий в прокатном производстве.- ;; ....
Целью изобретения является повышение точности. .
. Поставленная цель достигйётсяТем, чтб устройство, содержащее оптически связанные осветитель и оптоэлектронный скана- тор, расположенную между ними, заслонку связываемую с объектом, подключенный к сигнальному выходу сканатора формировательвидеосигнала, последовательно соединенные ключ, запоминающее устройство и индикатор, причем информационный вход
клича соединен с координатным выходом сканатора, снабжено N-кэнальиым коммутатором, N-1 парой последовательно соединенных ключей и блоков запоминания,
вычислительным блоком и блоком звтрмати- ifecKoro определения достоверности инфориации, вход коммутатора соединен с выходом формирователя видеосигнала, информационные входы ключей соединены с координатным выходом сканатора, выходы коммутатора соединены с управляющими входами ключей, выходы блоков запоминания подключены ко входам вычислительното блока, информационный выход вычислительного блока соединен с индикатором, блок автоматического определения достовернбсти ин формаций выполнен в виде схемы сравнения и подключенных к ее входам блоков определения минимума и блока определения максимума, входы которых соединены с диагностическим выходом вычислительного блока, заслонка выполнена с N-1 равномерно расположенными про-, резями. : ,г , ; .
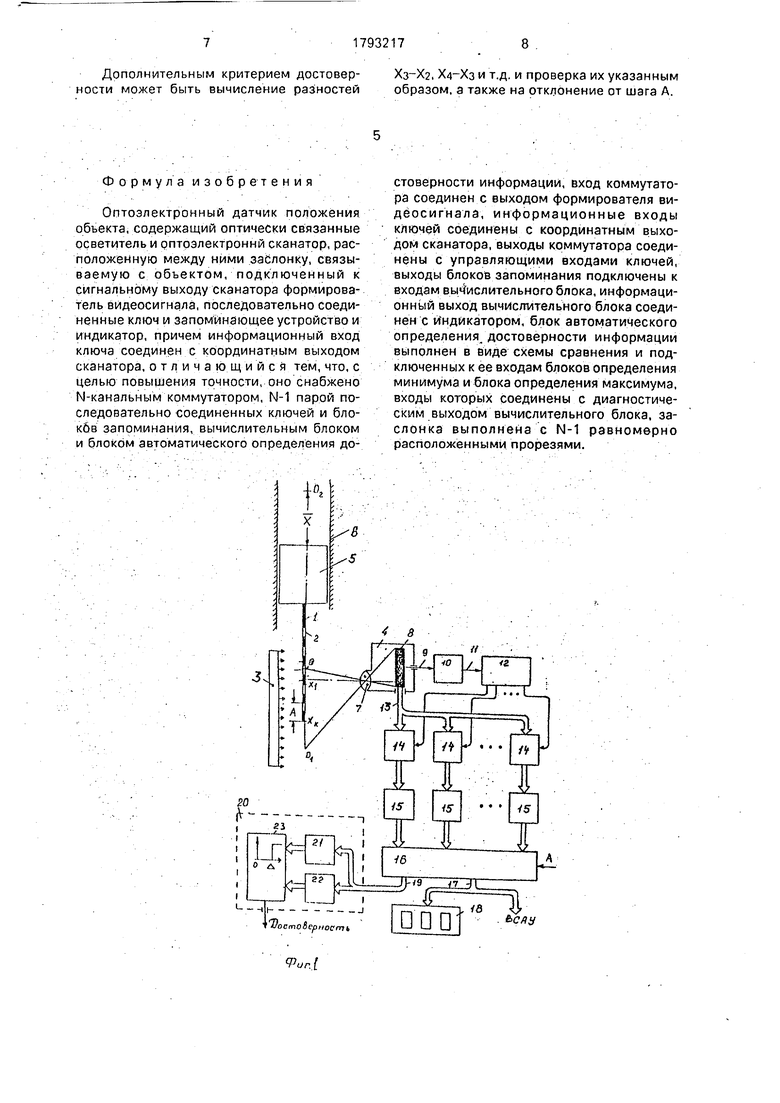
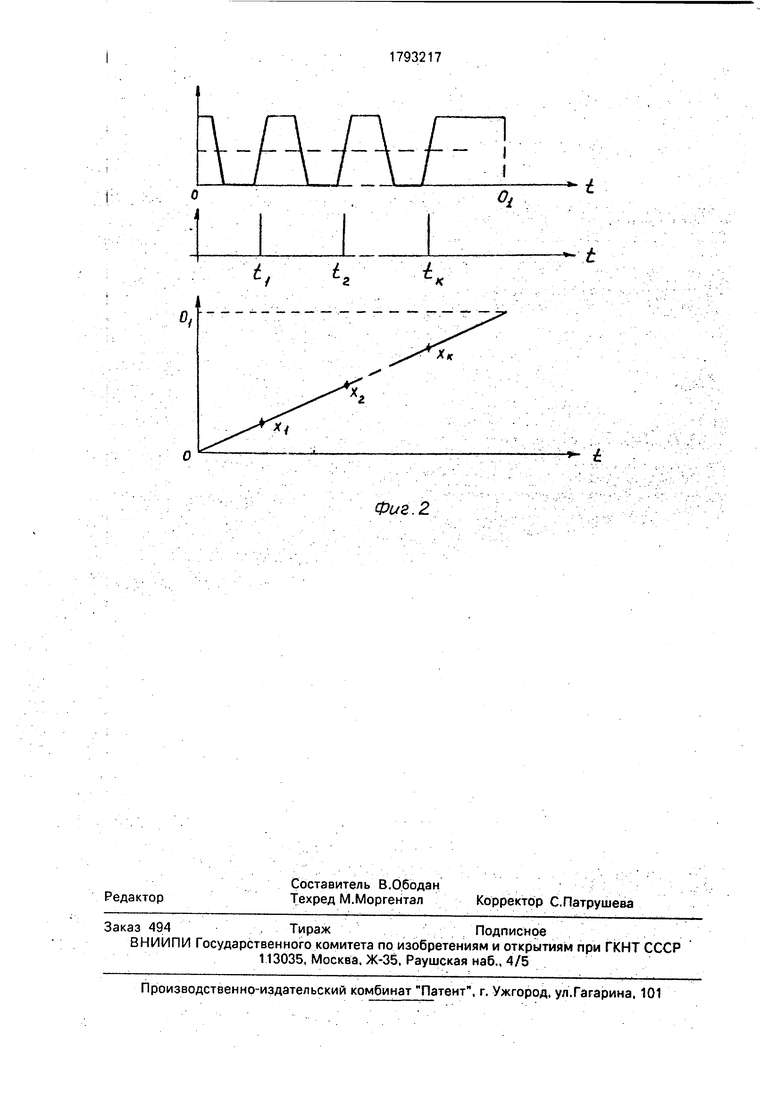
- На фиг.1 приведена блок-схема предлагаемого датчика; на фиг.2 - диаграммы, поясняющие его работу.
Заслонка 1 с прорезями 2 расположена между осветителем 3 и оптоэлектронным сканатором 4 и установлена на контролируемом объекте 5, перемещающемся в направляющих 6 вдоль оси ОЮ2. Сканатор 4 состоит из оптической системы 7 и фото- .. электронного сканирующего преобразователя 8, Сигнальный выход 9 сканатора соединен с входом формирователя 10 видеосигнала. Его выход 11 подключен к входу коммутатора 12. Координатный выход 13 сканатора подключен к информационным входам ключей 14, управляющие входы которых соединены с выходами коммутатора
5 12, Выходы ключей 14 соединены с соответствующими входами запоминающих устройств 15, выходы которых подключены к вычислительному блоку 16. К вычислительному блоку 16 через информационный вы0 ход 17 подключен индикатор 18, а через диагностический выход 19 - блок 20 автоматического определения достоверности информации, состоящий из блока 21 определения минимума и блока 22 определения
5 максимума; которые выходами подключены к схеме 23 сравнения с релейным выходом, входы этих блоков объединены и являются входом блока 20.
Истинное положение объекта X отсчи0 тывается точки Оа и определяется по координате Хк края заслонки, отсчитываемой от точки О OOi. В исходном положении объекта . Количество ключей 14 и ЗУ 15 равно N. Количество прорезей 2 в
5 заслонке 1 равно N-1. Прорези расположены равномерно с шагом А, значение которого как константа введено в вычислительный блок.
Фотоэлектронный датчик положения
0 работает следующим образом.
Сканатор 4 производит однострочную развертку заслонки 1 в пределах своего поля зрения ОСч, направление развертки от точки О до OL В процессе развертки скана5 тор на выходе 9 вырабатывает видеосигнал (фиг.2). характеризующий распределение освещенности в поле зрения сканатора 001. Положительному уровню видеосигнала соответствуют освещенные участки поля зре0 ния (прорези 2 и участок от Хк до Oi); нулевому уровню видеосигнала - непрозрачные участки заслонки 1.
Формирователь 10 вырабатывает короткие импульсы I (фиг.2) в моменты
5 ti,t2,..,,tK пересечения чувствительным элементом сканатора черно-белых границ, чему соответствуют середины положительных фронтов видеосигнала II. Указанные короткие импульсы I направляются поочередно коммутатором 12 на управляющие входы
ключей 14; первый импульс в момент ti поступает на левый (по схеме фиг.1) ключ 14, второй в момент t2 поступает на следующий ключ и т.д. Количество коротких импульсов | и номер К последнего используемого ключа определяются положением X контролируемого объекта и, следовательно, заслонки,
Кроме видеосигнала, сканатор на координатном выходе 13 вырабатывает кодовый Сигнал, характеризующий положение чувст- ительного элемента сканатора вдоль оси Oi в пределах поля зрения. Начало отсчета точка 0. Условно изменение кодового сигнала III показано на фиг.2. | В моменты ti,t2,...,tK появления корот- Уих импульсов соответствующие ключи 14 Последовательно открываются в и соеди- йенные с ними запоминающие устройства J5 записываются координаты Хт, Х2,...,Хк. черно-белых границ прорезей 2 заслонки 1 и ее края.
I По окончании цикла сканирования полученные координаты обрабатываются в вычислительном блоке следующим образом, начале определяется количество К запоминающих устройств, на выходе которых имеется нулевое значение координаты. За т ем определяется искомое положение X контролируемого объекта по формуле : + A(K-1),(1) где А - шаг расположения прорезей.
Результат измерения X выводится через в;ыход 17 на индикатор 18 и передается в систему автоматического управления положением объекта..
При перемещении объекта.5 перемещается и заслонка 1. При этом всегда коорди- н;ата Xi первой черно-белой границы (отсчитываемой отточки О) находится в пределах от нуля до величины А. Действительно, пусть объект перемещается из показанного на фиг.2 положения вниз. Как только величина Хч станет равной А, одно временно в точке О установится следующая черно-белая граница, и при дальнейшем перемещении объекта вниз появится еще один сформированный короткий импульс/ величина К увеличивается на 1, координата Xi скачком уменьшается с А до единицы младшего разряда кода положения объекта, а результат вычисления X увеличится на единицу младшего разряда, как и должно было произойти, Результат измерения X значительно меньше зависит от перемещений объекта и заслонки в неконтролируемых направлениях, чем у прототипа, т.к. величина А совершенно не зависит от указанных перемещений, а первая черно-белая граница, определяющая координату XL
всегда находится вблизи оптической оси, т.е. в зоне, где изменение расстояния от предмета до оптической системы приводит к существенно меньшим изменениям поло- жения изображения на фотопреобразователе 8, чем на краю поля зрения. Аналогично уменьшаются также погрешности, вызывае- . мые дисторсией объектива и нелинейностью собственно фотоэлектронного сканирующего
преобразователя 8. Выигрыш в точности тем больше, чем меньше шаг А расположения прорезей 2. Для датчика с ходом 100 мм при расстоянии 500 мм от заслонки 1 до оптической системы 7, длине фотоэлектронного преобразователя 20 мм, количестве прорезей 10, дисторсии оптической системы 1 % уменьше- ние максимальной погрешности измерения по сравнению с прототипом составит брйен- тировочно 15 раз при равномерном законе
распределения положения края заслонки в поле зрения сканатора.
Автоматическое onределение Дбстовёр- ности информации о положении X объекта 5 производится следующим образом.
В вычислительно 16 подсчитываются положения Х2.Хз,...,Хк края заслонки как Суммы координат второй чёрно-белой границы и уменьшенного на 1 по сравнению с формулой (1) количества шагов А, затем
третьей, четвертой и т.д. границ с соответствующим количеством шагов, т.е.
; Х2 Х2 + А (К - 2), Хз Хз + А (К - 3),
ХК +А (К-К) ХК
(2)
Полученные величины Xi,X2,...,xY через диагностический выход 19 вычислительного
блока 16 поочередно передаются в блок 20 автоматического определения достоверности информации. По окончании передачи данных в блоке 21 определения минимума выделяется минимальное значение последовательности ХМин, а в блоке 22 - максимальное Хмэкс. При нормальном функционировании датчика разность экстремальных значений не превышает порога
Хмакс Хмин Д.(3)
Если этот порог превышен, то срабатывает схема 23 сравнения с релейной характеристикой, на ее выходе появляется сигнал, что свидетельствует о недостоверности информации на выходе 17 вычислительного блока 24. Причиной недостоверности могут быть нарушение крепления заслонки, ее поломка, засорение одной или нескольких прорезей, неправильная работа формирователя с потерей коротких импульсов и др.
Дополнительным критерием достоверности может быть вычисление разностей
Х3-х2) Х4-Хз и т.д. и проверка их указанным образом, а также на отклонение от шага А.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения оптического волокна в соединительных наконечниках | 1985 |
|
SU1298545A1 |
| Устройство для определения координат объекта | 1986 |
|
SU1354226A1 |
| Устройство для подсчета объектов,расположенных беспорядочно | 1983 |
|
SU1129633A1 |
| Устройство для определения положения оптического волокна в соединительных наконечниках | 1987 |
|
SU1555621A1 |
| Устройство для допускового контроля паяных соединений на печатных платах | 1987 |
|
SU1539694A1 |
| Устройство для контроля децентрировки линз | 1991 |
|
SU1817843A3 |
| Устройство для отображения информации на экране телевизионного индикатора | 1988 |
|
SU1587572A1 |
| Устройство для исправления ошибок в волоконно-оптических системах передачи информации | 1990 |
|
SU1809534A1 |
| Устройство управления самоходным средством | 1988 |
|
SU1689921A1 |
| Устройство для считывания графической информации | 1980 |
|
SU881790A1 |
Использование: в измерительной технике при автоматизации производственных процессов для систем позиционирования крупных машин и механизмов. Сущность: датчик состоит из осветителя, прикрепленной к объекту заслонки с прорезями,скана- тора и электронной схемы. Положение объекта определяется путем суммирования двух отсчетов: грубого - по количеству освещенных прорезей и точного-по положению ближайшей к оптической оси сканатора грани прорези. Это позволяет исключить влияние перекосов объекта 5 в направляющих и повысить точность измерения положения объекта. 2 ил. И
Формула изобретения
Оптозлектронный датчик положения объекта, содержащий оптически связанные осветитель и рптоэлектроннй сканатор,расположенную между ними заслонку, связываемую с объектом, подключенный к сигнальному выходу сканатора формирователь видеосигнала, последовательно соединенные ключ и запоминающее устройство и индикатор, причем информационный вход ключа соединен с координатным выходом сканатора, отличающийся тем, что, с целью повышения точности, оно снабжено N-канальным коммутатором, N-1 парой последовательно соединенных ключей и бло- кбв запоминания, вычислительным блоком и блоком автоматического определения достоверности информации, вход коммутатора соединен с выходом формирователя видеосигнала, информационные входы ключей соединены с координатным выходом сканатора, выходы коммутатора соединены с управляющими входами ключей, выходы блоков запоминания подключены к входам вычислительного блока, информационный выход вычислительного-блока соединен с индикатором, блок автоматического определения;достоверности информации выполнен в виде схемы сравнения и подключенных к ее входам блоков определения минимума и блока определения максимума, входы которых соединены с диагностическим выходом вычислительного блока, заслонка выполнена с N-1 равномерно расположенными прорезями.
Фиг. 2
| Артемьев В.М | |||
| Локационные системы роботов | |||
| Минск, 1988 | |||
| Бессарабов Н.В | |||
| Измерители размеров и перемещений на основе приборов с переносом заряда | |||
| Электронная промышленность | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Петраков А.В | |||
| Автоматические ТВ комп- лейсы для регистрации быстрых процессов | |||
| М.,11987. | |||
