Изобретение относится к области фотографической, телевизионной и фототелеви- зйонной съемок поверхности и может быть использовано в тех случаях, когда необходимо исследовать рельеф фотографируемой поверхности и положение источника света, параметры съемочной аппаратуры и неровности рельефа таковы, что линейные размеры теней от этих неровностей могут быть измерены на снимках.
Известен способ определения высот отдельных объектов, расположенных на заданной поверхности, по величине отбрасываемой ими тени. Однако, если эта поверхность не задана, он не позволяет определить ни ее форму, ни высоту этих объектов, . .
Известен способ определения рельефа поверхности по стереоснимкам, в соответствии с которым проводят съемку одного и того же участка поверхности из различных точек пространства, по величинам сдвига идентичных точек на снимках определяют
превышения, по которым определяют рельеф. Однако при этом ограничена точность определения рельефа поверхности м не может быть повышена увеличением фокусного расстояния объектива, так как при заданном проценте перекрытия снимков К, фиксированной высоте съемки Н и фиксированном формате кадра а увеличение фокусного расстояния приводит к уменьшению размера захватываемого на местности участка съемки, что приводит к необходимости уменьшать базис фотографирования. На основании тн - средняя квадратическая ошибка определения высот объектов тн тДр
Н
и, таким образом, точность опа(1-К)
ределения высоты не зависит от фокусного расстояния.
Другим недостатком этого способа является невозможность его использования при сколь угодно малом базисе фотографирования, так как при К 1 неограниченно увеличивается тн.
4 О СО
кэ ю
Техническим результатом изобретения является повышение точности способа определения формы рельефа поверхности при сколь угодно малом базисе съемки по конфигурации отбрасываемых неровностями 5 рельефа теней.
Это достигается тем, что по предлагаемому способу при произвольном положении съемочного аппарата и различных положениях источника света или при раз- Ю личных положениях как съемочного аппарата, так и источника света, получают два снимка одного и того же участка поверхности, фиксируют на них тени от идентичных деталей и по данным по конфигурации, по- 15 ложении и длине этих теней определяют связанные с ними параметры функции, аппроксимирующей рельеф поверхности.
Существенное отличие данного способа огпрототипа достигается за счет нового.со- 20 четания следующих действий: с целью повышения точности, второй снимок получают при другом азимутальном положении источника света. Каждый из снимков получают при угловых высотах источника света, обес- 25 печивающих получение отдельных неперекрывающихся участков, ограниченных теневыми контурами, На теневых контурах выбираются точки, характеризующие форму теней, по данным о положении этих точек, 30 связанных с положением источника света в момент съемки, в сочетание с методами аппроксимации определяют форму рельефа.
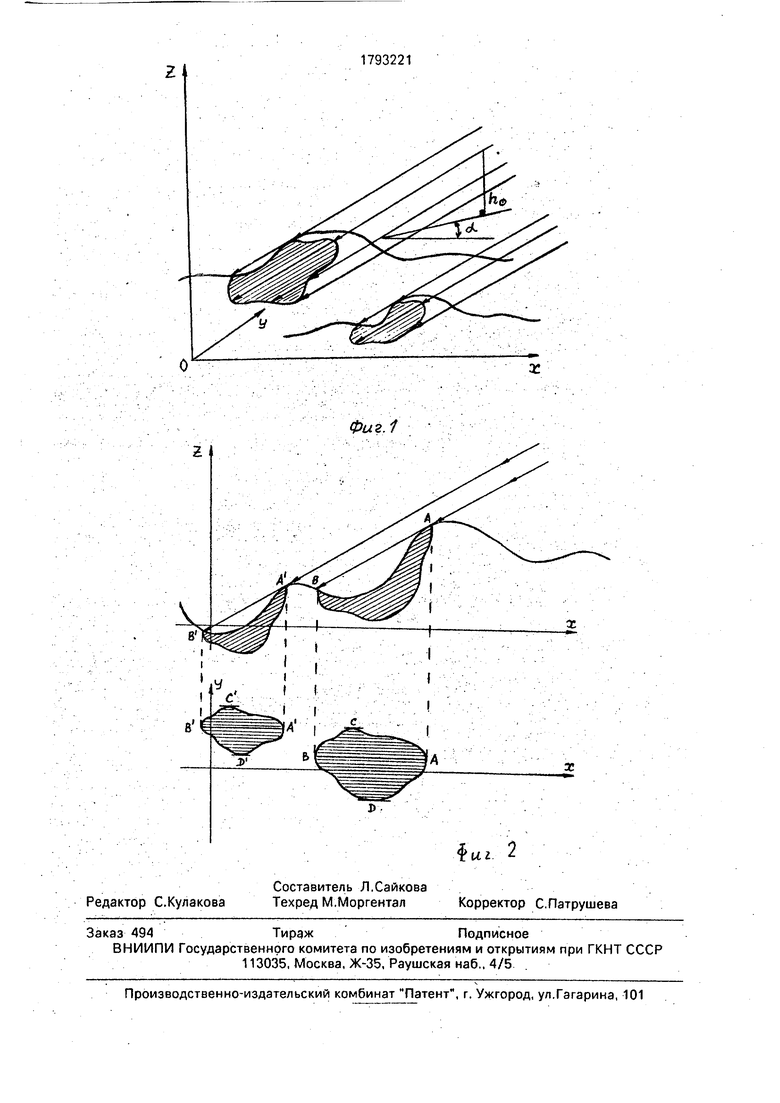
На фиг. 1 представлена иллюстрация освещенной Солнцем поверхности, когда вы- 35 сота Солнца Ь&, азиму: а; фиг.2 - конфигурация теней и их проекции в плоскости фотографирования при азимуте Солнца, разном нулю.
Сущность способа заключается в следу- 40 ющем. Некоторая поверхность, которую с достаточной точностью можно аппроксимировать дважды дифференцируемой функцией, освещается бесконечно удаленным источником света - Солнцем (фиг.1). В этом 45 случае падающие на поверхность лучи света можно считать параллельными. Положение Солнца характеризуется углами: высотой Солнца ha, над плоскостью XOY и азимутом Солнца а-углом в плоскости XOY, являю- 50 щейся плоскостью фотографирования с вве- денной ортогональной системой координат
( , .
Для простоты сначала примем, что про- 55 екции падающих лучей на фотографируемую плоскость параллельны оси ОХ, т.е. азимут равен нулю. На фиг.2 изображены профиль освещенной поверхности и проекции теневых областей на плоскость XOY.
Пусть отклонение рельефа поверхности от фотографируемой плоскости задается какой-либо функцией (x,y). Рассмотрим одну теневую область, изображенную контуром ABCD. Точка А, расположенная на контуре, получается как точка касания поверхности падающим лучом. Точки С и D являются крайними точками касания. Таким образом, часть контура тени, образованная дугой CAD состоит из проекций точек касания лучами света поверхности. Если угол падения лучей света h, то в этих точках fx tghQ.
Точки части контура CBD (исключая С и D) являются проекциями конечных точек теней, получаемыми пересечением продолжения падаю.щих касательных лучей с поверхностью. Так, точка В - конечная точка тени, полученная пересечением падающего луча, проходящего через точку касания А, с поверхностью. Тогда, если обозначить расстояние между точками А и В через d, соотношение между высотами (аппликатами) этих точек f(A)-f(B)dtgh0. .
В сечении поверхности в направлении падения солнечных лучей плоскостью солнечного вертикала внутри затененного участка на основании теоремы Лагранжа найдется точка, в которой касательная параллельна направлению падения солнечных лучей. Отсюда по теореме Ролля между этой точкой и точкой начала тени, в которой касательная также параллельна падению солнечных лучей, найдется точка, в которой (fxV fxx 0. Поскольку такая точка в любом сечении, параллельном оси ОХ, находится внутри затененного участка, она, в частности совпадает с точкой, в которой касательная к контуру параллельна оси ОХ. Такими точками являются точки С и D.
Таким образом, для контура ABCD, ограничивающего теневую область на изображении в, плоскости XOY, можно написать три соотношения:
Ч (AHohe
fx2ll(C)00™nfx2ll(D) 0)(1-3)
f(A}-f(B)dtghe
В общем случае, когда азимут Солнца не равен нулю (фиг.1), также можно получить подобные соотношения; осуществив поворот в плоскости XOY на угол а; в этом случае они примут вид:
Л fг) f
3- I A cos a + 3- U sin a tghe a Xay
$ fi f
lccos2a + 2 . . Iccosaslna-f
dx2dxdy
+
-#f
ic sin2« 0
ау2
f(A)-f(B) - dtgh0(4-6) Для определения параметров аппроксимирующей рельеф функции (aij, x, у) трех уравнений недостаточно. Поэтому нужно брать на нескольких снимках изображения теневых областей от одних и тех же неровностей рельефа, полученные при различных высотах Солнца.
Пусть, например, функция, аппроксимирующая реальную поверхность, имеет вид:
v i i z У Даи х У
Коэффициент а0о можно определить, если известна высота хоть одной точки на Поверхности. Число неизвестных коэффициентов (К+1) , тогда для определения коэффициентов aij необходимо минимальное число теневых контуров на снимках, равное
i. . (К + 1)2, „ N С + 1
0
0
5
Если для такой функции вычислить соответствующие производные, то соотношения (4-6) будут представлять собой систему трех линейных уравнений с (К+1)2-1 неизвестными (эоо не участвует). Аналогичные уравнения записываются для других теневых контуров, в итоге получится система ли- нейных уравнений, в которой число уравнений больше числа неизвестных. Решение полученной системы находтг по методу наименьших квадратов или другими хорошо разработанными методами.
Наличие пересечений некоторых теневых областей на изображениях не может помешать решению задачи определения формы рельефа поверхности, так как для каждого контура BL бирается мсего три характерные точки. Если вследствие наложения теней некотор .se из них невозможно использовать, то кедостающие уравнения можно получить за счет других теневых контуров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения формы поверхности | 1988 |
|
SU1645821A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПОЛЕТЕ | 2015 |
|
RU2605232C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ИСПЫТАНИЙ В ВИДЕ ТЕЛА ВРАЩЕНИЯ С ИЗВЕСТНЫМИ ГЕОМЕТРИЧЕСКИМИ ПАРАМЕТРАМИ | 2013 |
|
RU2536096C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ С КОСМИЧЕСКОГО АППАРАТА КООРДИНАТ ИСТОЧНИКА КОЛЬЦЕВЫХ ВОЛН НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ФОТОГРАФИРУЕМЫХ С КОСМИЧЕСКОГО АППАРАТА ЗЕМНЫХ ОБЪЕКТОВ | 2014 |
|
RU2587539C2 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТ И РЕЛЬЕФА ОБЛАКОВ | 1973 |
|
SU386247A1 |
| Способ исследования рельефа поверхности | 1978 |
|
SU686001A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ ТОЧЕК МЕСТНОСТИ ПО РЕЗУЛЬТАТАМ УГЛОМЕРНЫХ ИЗМЕРЕНИЙ НА КОСМИЧЕСКИХ ИЗОБРАЖЕНИЯХ | 2007 |
|
RU2362973C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| СПОСОБ МАСШТАБИРОВАНИЯ СНИМКОВ ФОТОПЛАНИМЕТРИЧЕСКОЙ СЪЕМКИ ГОРИЗОНТАЛЬНЫХ ГОРНЫХ ВЫРАБОТОК | 2020 |
|
RU2791080C2 |
Использование: фотограмметрия и аэрокосмическая съемка. Сущность изобретения: при измеренном положении съемочного аппарата и при различных измеренных положениях источника света получают не. менее двух снимков одного и того же участка поверхности, фиксируют на этих снимках тени от йден-гичных деталей и по данным о: конфигурации, положении и длине этих теней определяют параметры функции, аппроксимирующей рельеф поверхности. 2 ил.
Формула изобретения .. . 9
Способ определения формы рельефа поверхности, заключающийся з получении двух снимков при измеренном положении Съемочного аппарата, измерении элементов Соответствующих контуров на каждом из снимков и обработку результатов измере- с использованием аппроксимирующей функции, отличающийся тем, что, с Целью повышения точности, второй снимок получают при другом азимутальном положении источника света, каждый из снимков Получают при угловых высотах источника
света, обеспечивающий поучение отдечь- ных тенев ix участков, из меряют углоЕ,ые координаты исто ника све а, соответствующее каждому сн 1мку, в качестве контуров выбирают онтуг теневь х участков, нз участках выГоанны/. контур в, обращенных к 1 точник:; света., выбира от точки, через которые пр )водят прямые параллельные направленно на источник света, измеряют длины от резков этих прямых, лежащих внут- .ри теневого уч стка, значения этих длин, а также з наченитизмёрвнных угловых координат :сточниса света используют при обработка результатов.
| G.F.Parry, С.M.Gold.Solar-Altitude Nomogram | |||
| - Phgtogrammetric Engineering, ,1972, №9, pp.891-899 | |||
| Лобанов А.Н | |||
| Фотограмметрия | |||
| - M.: Недра, 1984, c.552 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Г, | |||
