1
(21)4018980/10
(22)21.10.88
(аб) 30.04.91 . Бюл. К 16
(71)Московский институт инженеров геодезии, аэрофотосъемки и картографии
(72)ЮЛ. Бирюков, Л.А. Сайкова и И.Г. Журкин
(53) 28.711(088.8)
(56) Авторское свидетельство СССР
№ 68600, кл. G 01 С 11/02, 1978.
Лобанов А.И. Аналитическая фотограмметрия. М.: Недра, 1972, с.224.
(54) СПОСОБ ОПРЕЦЕЛЕНИЯ НОСТИ
ФОРМЫ ПОБЕРХ57) Изобретение относится к фотографической, телевизионной и фототелевизионной съемке поверхности. Цель нзои- ретений - повышение точности. При различных несовпадающих положениях источника света и съемочной системы получают не менее трех снимков поверхности, на которой расположены отдельные отбрасывающие тень объекты, измеряют длину этих тенек на снимках и по определенным элементам ориентирования съемочном системы и источника света 1,з пиработки находя - параметры, характеризующие форм-. поверхности, в виде клкои-лшю аппроксимирующей функции. 2 ил .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения формы рельефа поверхности | 1989 |
|
SU1793221A1 |
| Способ исследования рельефа поверхности | 1978 |
|
SU686001A1 |
| Съемочная камера для получения измерительных рентгеновских снимков | 1978 |
|
SU746185A1 |
| Съемочная камера для получения ренгеновских снимков объектов | 1978 |
|
SU744230A1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711775C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЕМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2709978C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2712781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711834C1 |
| Способ стереофотограмметрической съемки подвижных объектов | 1974 |
|
SU502222A1 |
Изобретение относится к фотографической, телевизионной и фототелевизионной съемкам поверхности и может быть использовано в тех случаях, когда необходимо бесконтактным способом исследовать рельеф поверхности и когда имеется возможность получения трех снимков одного и того же участка поверхности при различных положениях близкого к точечному источника света и сьёмочного аппарата и при наличии неперекрывающих друг друга теней на снимках.
Цель изобретения - повышение точности путем обеспечения возможности использования сколь угодно малого базиса съёмки.
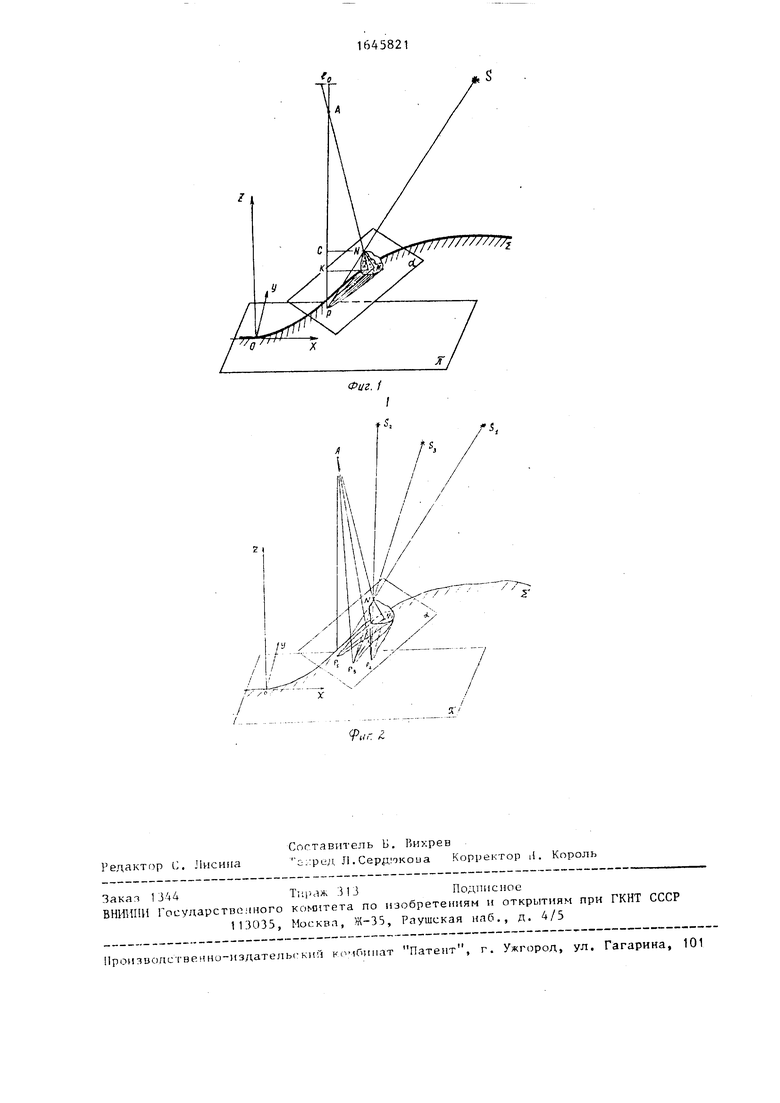
На фиг. 1 представлено положение источника света и съёмочной камеры относительно объекта, соответствующие моменту получения одного снимка; на фиг. 2 - иллюстрация ситуации, когда съемочный аппарат неподвижен, а источник света перемещается.
Сущность способа заключается в следующем.
Положение источника света, съемочного аппарата и объекта изображено на фиг. 1, где Т - плоскость фотографирования, в которой введены оси координат ОХ и OY, а ось Z направлена перпендикулярно плоскости и . во - касательная плоскость к исследуемой поверхности 2. с точкой касания, расположенной в основании объекта, отбрасывающего тень. Будем считать, что в некоторой окрестности этого объекта исследуемая поверхность 2Е. достаточно
05
- ел
ОС N3
хорошо приближается касательной плос- костмо ( . Но снимку будет определяться длина теин 10, соответствующая проекции отрезка NP на плоскость, параллельную плоскости фотографирования и проходящую через точку N. Началом тени будем считать точку N, получаемую как точку касания поверхности объекта лучом, выходящим из источника света S. Точка Р пересечения этого луча с плоскостьюciсчитаем концом тени объекта.
На осноиании соотношения L iril0,
za-zt где га -и-- - знаменатель масштаба
снимка, по длине тени 1Q, измеренной на снимке, ыо;гно установить длину от- ре ч ка I NC| L.
В выбранной системе координат положения съёмочного аппарата А и источника светл S будут соответственно задаваться координатами А (х, , у , ,) и S(x,.,y ., z j) . Координаты точки, конца нормали, равны (хм, yw, z). Для определения воктора M0N необходимо найти коор ,«:-;iTbi точки М 0(хо , у0 , г а ) .
Из подобия треугольников, образованных связкой лучей с центром А
,-
a ZM
К -горди11аты точки Q находятся как пересече ше прямой (AN):
у.
N Уа
ПЛОСКОСТЬЮ .
ха
XN -XQ
гд
ZH za
и равны
X.-I- (
а z,(- ZQ Na
О 2 Д,-ч
- % ;г;:(.
г« Ґ-;
7-Q гл
(zN-za) zc
. Тля вычисления координат точки К, как пересечения прямой (ЛР) с плоскостью г-.0, надо сначала найти коори 21,(у,) Т7,-г-т Уад.)f
(хм-х0)) + (ун-УоНу5-ум) + (2м-г0)(г5-2ц) где
4 -L(z5-zN)
динаты точки Р, являющейся пересечением прямой (NS):
10
15
20
х - х ,
5-Z-5N УЗ Ун
5 И с касательной плоскостью
(xN-x0)(x-x0)+(yN-y0)(y-/0) + +(ZH-ZO)(Z-ZO) 0.
Координаты точки Р равны соответственно:
1мвЫ/(х4-хн)
К 1- : (NS, M0N)
Мо«111 1Хн).
(NS, FVN)
Хр Хи
Ур УК
(3)
z - - ±bNl lzi-zj)
р N
(NS, MnN)
0
Координаты точки К: za
х, хл + а zp- z
(xp-xa)
УК У а z
a 7-о Zq ,.
----- yp-ya)
zp za r и
(4)
гк
о
Теперь можно найти длину отрезка 35 (кд|:
/Ю)|, 5Я (3) v н Q; р za
2) 40
где
А
45
Сопоставив выражение (5) с выражением (1) и подставив координаты точки Р из (3), получим соотношение
(6)
.)f
4 -L(z5-zN)
Xza-z«Ho
L - - j: 5Ih4-ib2
Соотношение (6) является урашч пием, связывающим координаты точки М - начала вектора нормали М N, Следовательно, чтобы найти эти коордннчтм, необ- ходим. три таких ураонсння, т.е. не- 5 обходимы три снимка одного объекта с различным положением теней.
По снимку определяются две кооргп:наты точки N (х, У)« Координат точки А(ха,уа,я;а) и источника света S(xc,y,zc; известны. Неизвестными
575
являются
мо(хо Уо
V
И
Если рельеф поверхности аппроксимируется функцией (а , : ,х,у ),
- . / Л/ . .
где
Ув
х
л - параметры,
тогда z.
tf(a(.,x
и неизвестными в (6) остаются z По, кроме того, необходимо
чо о
определить параметры а
Г
Как известно, вектор нормали к верхности в чочке г координатами
9(f4
з,
MO
V
- Г-Эч : ы i aTVo
(х
о
, -4.
та1; K.IK с другой стороны
uM-v
i-NIiS
л
)
то сопосJ хщхь (
ппв JTH выражения для координат чек- ра нормчдк, получим соотношения:
(v,
3 о.Уо
XN хо
-N
- z.
(7)
Э(
(о).
№.I-Z°
2Г Z,
-о
Таким образом, пять уравнении (ь) и (7) образуют систему уравнении для определения координат вектора нормали
w«
1 0 - О
.рункппи
и параметров алпроксимиру ющен .рункцпи а ,. .
В случае, когда аппроксимируюплн поверхность не является плоскостью, число параметров а,. бопьше двух, и шести уравнении для решения задачи недостаточно. Поэтому необходимо использовать снимки (по три положения тени) других объектов Если число параметров а равно К, то для решения задачи нужно иметь снимки не менее К+1
объектов. Так, если, например,
в Krj4e-:TBe аппроксимирующей функции пз5| гь поверхность второго порядка
7-а2гх +2а2,ху + а
н + 2ягох
1V 4 Я
Д0( N riOO)
где
9,р
(Tx;M;2attV2«2,5o+2a2e
(3 Л (TvW
21
х +2л ., х +2а
01
20
2)
-
35
45
- 40
50
изнестпых , к-ох ицлен ion а и ординат . , . о, у° (i 1,2,3)
30
для определения шести коэффициентов, вчодячуп: в выражение функции, задающей рельеф, необходимо иметь снимки трех об-,сктои. Тогдт получится систем.1, состоящая из пятнадцати уравне- Hiiii.H которую оудут входит шесть неи 9 ко- трех nopM.iJifjHi.ix BeKTiij-oB.
При более сложном иыборе поверх- iit 4Tn Ьудст неоичоднмо большее число снимкон. Р-рщение получаемой системы осу|цостнляется с- помощью ЭВМ. Вид (Ьункцип z Ц}(а ;j , х, у), аппрокснмн- pyioi ien речьгф, мо-кет быть получен раз- ЛЯЧ1П.1МИ м,тeм,TIlчecки пl методами.
Ф о р м у л а и з о б р о т с н и я Спосоо опое и леинп фермы поверхности, пк -почаыцим О1 ределеьие положения гъемочього аппарата и источника гнета, получение первого снимка, изменение взаимного рлспочожения съемочного аппарата и источника света с определением их положения, получение второго снимка, измерение длин теней на этих снимках и ооработку результатов пзмерышй, (j т л и ч а ю щ и и - с я тем, что, г целью повышения точ- постч, изменения взаимного расположения осуществляют перемещением источника света, после получения второго снимка вновь не менее одного раза изменяют расположение источника сьета с определением его положения, получают дополнительный снимок и измеряют на нем длину теней, значение которых используют при обработке результатов измерений.
e i
