vi чэ
CJ hO Os
о
Изобретение относится к измерительной технике и может быть использовано для выявления источников вибрации конструкции, например вертолета, двигателя,
Известно устройство, содержащее дат- чик вибрации и пороговую схему, которая выдает сигнал превышения заданного уровня вибрации, Делитель частоты вибрации с подобранным соответствующим образом коэффициентом деления и выходное уст- ройство, оптическое или акустическое. Указанные устройства позволяют по частоте вспышек или звуковых сигналов оценить частоту вибраций конструкций и источник, вызвавший вибрацию.°
Недостатком данных устройств является низкое качество контроля вибрации и н6- достаточная помехоустойчивость.,
Наиболее близким по технической сущности к заявляемому является устройство, содержащее датчик вибрации, датчик частоты.вращения, схему синхронизации, состоящую из формирователя импульсов, д Недостатком устройства является от
сутствие возможности выявления ряда
25
источников вибрации, определение пара метров только одного основного тона и его гармони ; ::д;;;;v- v;- ; - ; .. : ..V
Целью изобретения является выявление источников вибрации за счет синхронной ре- 30 гистрации непрерывных составляющих виб ропроцесса на фоне меток, следующих частотой, кратной частоте вращения или частите колебаний деталей контролируемой
КОНСТРУКЦИИ. : ч, 1 . :к 5
Указанная цель достигается тем, что устройство, включающее датчик вибрации, датчик частоты, фОрйирователъ ймпуйьсйв, содержит второй и третий датчики вибрации, выходы которых подключены собтвет- 40 ственно к первому, второму и третьему информационному входу регистрирующего устройства и соответственно к первому, второму и третьему входу трехвходового порогового устройства, выход которого под- 45 ключей к входу запуска регистрирующего устройства, а также N-канальной схемы синхронизации, содержащей N каналов из последовательно соединенных датчика частоты, делителя частоты, формирователя 50 импульсов, выходы N формирователей импульсов подключены соответственно к следующим N информационным входам регистрирующего устройства.
Предлагаемое устройство регистрации 55 механических колебаний обладает существенными отличиями по сравнению с известными техническими решениями, поскольку именно совокупность отличительных признаков и их взаимосвязь между собой и из0 5
0
5
0
5
0 5 0
5
вестными признаками, присущими прототипу, позволяет выявить источник вибрации за счет синхронной регистрации непрерывных составл яющих вибропроцесса на фоне меток, следующих с частотой, кратной частоте вращения или частоте колебаний деталей контролируемой конструкции.
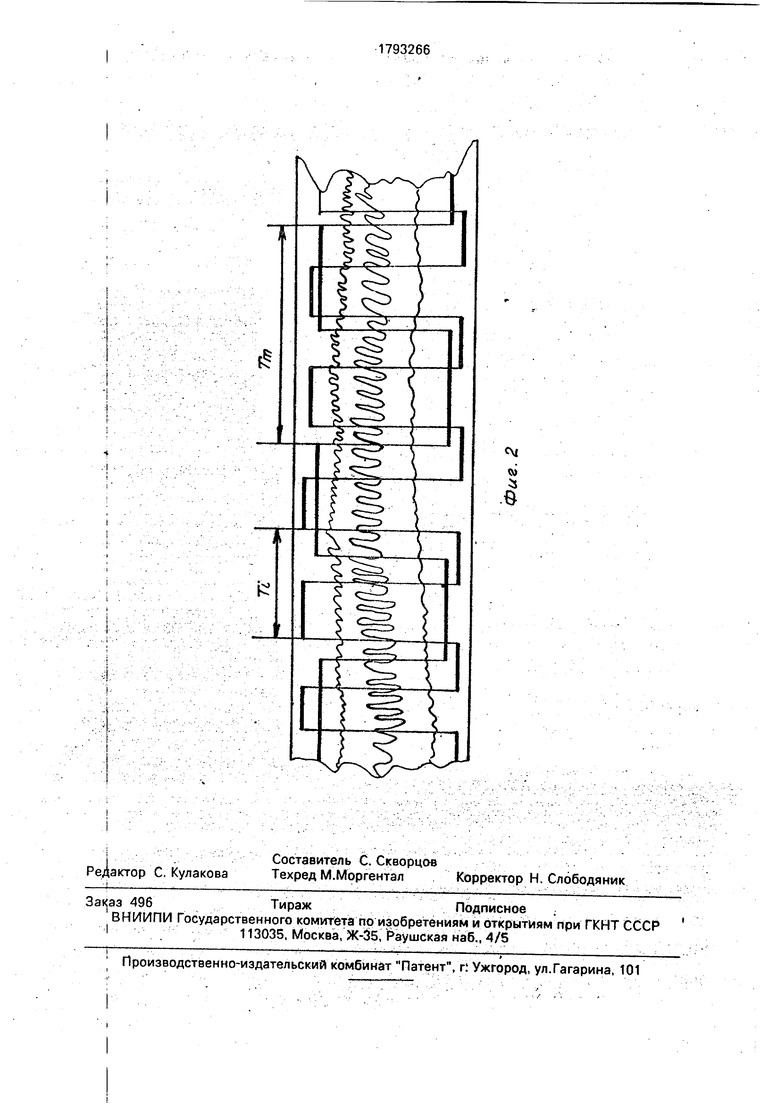
На фиг. 1 дана структурная схема предлагаемого устройства; на фиг 2 - формат записи составляющих вибропроцесса и меток деталей.
Устройство содержит три датчика вибрации 1-3, выходы которых подключены соответственно к первому, второму и третьему входу трехвходового порогового устройства 4 и соответственно к первому, второму и третьему информационному входу реги- стрйрующегб устройства 5, М-канальнуго схему синхронизации, включающую последовательно соединенные N датчиков частоты 6...(1+5), N делителей частоты 7 {N+1+5)...(2N+5), N формирователей импульсов 8 (2N+1+5)..,(3N+5), выходы которых подключены соответственно к следующим N информационным входам регистрирующего устройства 5, где N - количество учитываемых деталей конструкции и соответственно количество датчиков частоты, делителей частоты и формирователей импульсов, а I Текущий номер соответственно детали конструкции, датчика частоты, делителя частоты, формирователя импульсов i
1,2,3...N.r::-vV ::V ;;;; ;;. : .
Устройство работает следующим образом. . /.- - ;- ;
Механические колебания контролируемой конструкции преобразуются в пропорциональный электрический или механический сигнал, соответствующий колебаниям конструкции по трем осям с помощью трех датчиков вибрации 1-3. Выходы датчиков вибрации подключены к трехвходовому пороговому устройству 4 и трем информационным входам регистрирующего устройства 5 соответственно. При превышении амплитуды колебаний по любой из трех осей сверх установленного уровня пороговое устройство 4 выдает сигнал запуска регистрирующего устройства 5, которое начинает запись трех составляющих вибролроцесса конструкции на фоне меток. Частоты вращения или колебания деталей конструкции, выдаваемые датчиками частоты 6...(N+5), делятся соответствующими делителями (N+.1+5)...(2N+5) с соответствующим образом подобранными коэффициентами деления Ki. Выходные сигналы делителей (N+1+5)...(2N+5) с по- Мочцью формирователей импульсов (2N+1+5)....(3N+5) преобразуются к виду, необходимому для регистрации, поступают на другие информационные входы регистрирующего устройства 5 и записывают в виде м 5ток, Размах записи меток деталей устанавливается таким, чтобы исключить или уменьшить затенение записи составляющих вибропроцесса, как показано на фиг.2. Определение i-ой детали, вызвавшей вибра- ц|ш конструкции, осуществляется подсчетом количества периодов MI виброколебаний, зарегистрированных за период следования клждой из i меток (i 1....N), и попарным сравнением MI с Кь В случае совпадения MI с KJ индекс укажет на деталь DI, вращающуюся или колеблющуюся с частотой FI и вызвавшую вибрацию конструкции по этой члстоте.. .
EcnnMIIM(M|-Kt)1,...Nr
TpiN0Ki i,l Di. .Минимальное значение К| выбирается и $ условия достижения требуемой разрешающей способности, определяемой минимальной кратностью Sm частот вращения ити колебаний деталей контролируемой конструкции
,,«L
Sm MlN
гДе1 1,2,...М,
j N-i+1 : i J
I -
-i.-i +,ь,
и
К
, FJ -частоты вращения или колебаний 1-ой j-ой детали контролируемой конструкции. Условие различимости записей
min(Sm -l) V А I ИЛИ
ям по разрешающей способности, скорости протяжки носителя, количеству информационных входом,.например светолучевым осциллографом типа К12-51,
Датчики вибрации - любой конструкции, удовлетворяющие требованиям по точности, чувствительности и диапазону рабочих частот, например МП-95.
Датчики частоты вращения могут быть
0 штатными, например Д1М, Д2М, или вновь устанавливаемыми.
Делители частоты строятся с учетом коэффициента преобразования самого датчика частоты, Так, если используется датчик
5 Д1М, Д2М, то необходимо учитывать, что частота их выходного напряжения в 2 раза больше частоты вращения вала датчика. Необходим и учет отношения частот вращения контролированной детали и вала датчика.
0 Например, получение меток, следующих с периодом, равным двум оборотам несущего винта МИ-8.
1. Передаточное отношение от входных валов редуктора ВР-8А к несущему винту
5 Квв-нв 0,016;с.
2. Передаточное отношение от входных
валов редуктора ВР-8А к валу датчика КВвдо 0,1984; . ...:-
:3.- Частота выходного напряжения дат0 чика оборотов тд.о 2fo6.в, где Тоб.в - частота вращения вала датчика.
4. Период следования меток несущего зинта равен 2, W 2. Получим коэффициент Кн.в деления частоты напряжения выдавае5 мого датчиком оборотов несущего винта для получения меток, следующих с периодом, равным двум оборотам несущего винта
Кн.в. W-ffl.o W-2-fo6.B
2
w.KB.B.-fl.o., 2.2.0,1984 Кв.в.-н.в0,016
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики технического состояния агрегата авиационного привода | 2017 |
|
RU2667830C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ УПРАВЛЕНИЯ ДЛЯ ТИРИСТОРА | 1991 |
|
RU2009601C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ И СТЕПЕНИ ПРИРАБОТАННОСТИ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 1991 |
|
RU2029935C1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| Устройство для измерения частотных характеристик колебаний вращающегося вала | 1983 |
|
SU1310644A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Устройство для диагностики дизельного двигателя внутреннего сгорания | 1979 |
|
SU862027A1 |
| Способ диагностирования цилиндропоршневой группы газомотокомпрессора | 1990 |
|
SU1741007A1 |
Изобретение относится к измерительной технике и может быть использовано для выявления источников вибрации конструкции. Устройство содержит три датчика вибрации 1-3, трехвходовое пороговое устройство 4, регистрирующее устройство 5, N-каиальную схему синхронизации, включающую N датчиков частоты 6...(1+5), N делителей частоты (N+1+5)...(2+5), N формирователей импульсов (2N+1+5)...(3N+5), где N - количество учитываемых деталей конструкции и, соответственно, количество датчиков частоты, делителей частоты и формирователей импульсов, i - текущий номер соответственно детали конструкции, датчика частоты, делителя частоты, формирователя импульсов, i 1,2,3...N. 2 ил. k/ 1C
Д1
(Sm 1) V Al
1
(Sm 1) V (Sm-1)-V
1
где AI - разрешающая способность носи- т4ля информации;
i V - скорость протяжки носителя. Остальные Ki Kmin выбираются из условия Однозначной идентификации меток по их периоду следования. Минимальная скорость протяжки носителя
j Vmln Fmax A I,
r&e Fmax - максимальная частота вращения колебаний детали, т.е. ; Fmax -MAX{F;}.
Регистрирующее устройство может быть любым, удовлетворяющим требованиПриняв Кн.в 50,получим ошибку - 0,008064 отн.ед. Увеличив W можно уменьшить ошибКу, связанную с округлением получаемого дробного Кн.в., а при N 20 получаем требуемый Кн.в - 496, т,е. с абсолютной точностью. Для получения меток, следующих с частотой вращений рулевого винта или вала
привода рулевого винта, можно использовать туже частоту напряжения, выдаваемую датчиком оборотов несущего винта, но с учетом лередаточчого отношения вала НВ или вала датчика о эоротов к валу привода рулевого винта или самого рулевого винта. Связь между НВ, валом привода и рулевым винтом жесткая, таким образом можно, используя этот факт, получить метки с периодом следования, кратн ым частоте вращения и этих
деталей, а также других, например, главного вентилятора, используя только один датчик частоты.
Непосредственно делители с рассчй- танным коэффициентом деления строятся на базе цифровых счетчиков с фиксированным или программируемым.коэффициентом деления, например, выполненных по техйо- погии КМО.П 561ИЕ11, ТТЛ 155ИЕ7, 155ИЕ6, 155ИЕ9 или 555ИЕ6, 555ИЕ7. Подойдут любые счетчики, т.е. все серийно выпускаемые счетчики имеют максимальную частоту счета, значительно превышающую частоты вращения или колебании деталей, реально существующих или разработанных в будущем. Между датчиком частоты и непосредственно делителем требуется формирователь импульсов, который из синусоидального напряжения сформирует импульсы требуемой амплитуды например, на базе амплитудного компаратора 554 САЗ. Если необходимо увеличить коэффициент деления для уменьшения погрешности округления, то можно использовать схему двухполупериоДного выпрямления переменного напряжения, выдаваемого датчиком. Можно еще использовать схему умножения частоты, например, на базе логических элементов .Сложения. Умножитель устанавливается между выходом амплитудного компаратора и входом делителя, у которого вдвое увеличен коэффициент деления. -.,:: .-:,. л/v ; ; . ; :
Формирователь импульсов выполнен на базе амплитудного компаратора типа 554САЗ. Величина опорного напряжения выбирается в пределах, заключенного ме
Ф о р м у л а и з о б р ет е н и я v
Устройство регистрации механических колебаний, содержащее первый датчик вибрации и формирователь импульсов, о т- л и ч а ш щ е е с я Тем, что, с целью .расширения эксплуатационных возможностей путем выявления источника вибрации, оно снабжено вторым и третьим датчиками вибрации, регистратором, трехвхоДовым пороговым блоком, три входа которого соединены соответственно с выходами первого, второго и третьего датчиков вибрации и 6 тремя входами регистратора, четвертый
ду максимальным значением логического нуля (лог.О) и минимальным значением .лог. Г на выходе делителя частоты. Амплитуда положительного импульса регулируется Р 1, отрицательного - Р 3 и определяется требуемым размахом записи меток и относительным положением на носителе информации меток, соответствующих различным деталям, учитываемым при диагностировании вибрации исследуемой конструкции. Например, размах записей меток несущего виНта устанавливается большим по сравне- нию с размахом записи меток рулевого винта, что упрощает различение меток винтов не только по периоду следования, но по аналогии: несущий винт большего диаметра, чем рулевой, соответственно и размах записи меток ЕВ больше чем у РВ и т.д.
Трехвходовое пороговое устройство строится на базе амплитудного компаратора, Например типа 554САЗ, он имеет открытый коллекторный и эмиттерный выход, что позволяет объединять их в схему монтажное ИЛИ, т.е. при срабатывании,или первого компаратора, или второго, или третьего формируется выходной сигнал, который затем усиливается до уровня, достаточного Для Включения регистрирующего устройства. На вхЬдах амплитудных компараторов установлены пиковые детекторы для исключения подачи команды на включение регистрирующего устройства в виде серии коротких импульсов.
Достижение указанной цели позволяет производить достоверную идентификацию источника вибрации конструкции при минимальных аппаратурных затратах.
вход которого соединен с выходом трехвхо- дового порогового блока, N-канальной схемой синхронизации, где N - число контролируемых источников вибрации, каждый из N каналов схемы синхронизации состоит из последовательно соединенных датчика частоты контролируемого источника вибрации, делителя частоты и формирователя импульсов, выходы каждого из N каналов схемы синхронизации соединены соответственно с каждым из 4+N входов регистратора, первый, второй и третий датчики вибрации расположены так, что оси их чувствительности ортогональны.
| Устройство для исследования пористых образцов | 1986 |
|
SU1346980A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ спектрального анализа | 1960 |
|
SU136949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шунт | 1985 |
|
SU1390644A1 |
