2.Станок по п. 1, отличающийся тем, что он снабжен датчиком допустимой технологической перегрузки двигателя пилы для распиловки лесоматериала в наибольшем сечении его распиловки и подключенным к нему одним из своих входов элементом ИЛИ, другой вход которого соединен с соответствующим наименьшей скорости выходом блока определения скорости, а выход подключен к входу выбора наименьшей скорости блока управления многоскоростным двигателем.
3.Станок по п. 1, отличающийся тем, что блок управления многоскоростным электродвигателем содержит аппараты коммутации электродвигателя, количество которых равно числу скоростей электродвигателя, усилитель, подключенный к его выходу элемент включения пониженных скоростей, реле времени, размыкающий контакт которого последовательно соединен с элементом включения пониженных скоростей, схему ИЛИ и связанный с ее выходом элемент отключения аппаратов коммутации, причем входами выбора скоростей блока являются входы усилителя, а входами управления отключением - входы схемы ИЛИ, причем выходы элемента включения пониженных скоростей соединены с входами аппаратов коммутации электродвигателя.
4. Станок по п. 1, отличающийся тем, что блок выбора скоростей выполнен в виде переключателя, причем входы блока выполнены в виде неподвижных контактов, а выходы - в виде подвижных, количество позиций переключателя равно количеству градаций диаметров, а количество его полюсов - количеству пониженных скоростей.


| название | год | авторы | номер документа |
|---|---|---|---|
| КРУГЛОПИЛЬНЫЙ СТАНОК | 1991 |
|
RU2031775C1 |
| Устройство для поперечной распиловки лесоматериалов | 1983 |
|
SU1161384A1 |
| Способ раскряжевки хлыстов | 1981 |
|
SU1034899A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| МНОГОПИЛЬНАЯ РАСКРЯЖЕВОЧНАЯ УСТАНОВКА | 2020 |
|
RU2740518C1 |
| Способ поперечной инерционной распиловки лесоматериалов круглыми пилами | 1983 |
|
SU1357226A1 |
| Многопильное устройство для раскряжевки | 1980 |
|
SU960010A1 |
| Лесозаготовительная машина | 1988 |
|
SU1713804A1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК | 2005 |
|
RU2286875C2 |
| Устройство для защиты пилы от перегрузок | 1981 |
|
SU1033315A1 |
1. АВТОМАТИЗИРОВАННЫЙ МНОГОПИЛЬНЫЙ СТАНОК, включающий пильный блок, который содержит несколько пильных аппаратов, их приводы с установленными в цепях питания двигателей датчиками нагрузки, механизм подачи лесоматериалов с приводом, имеющим многоскоростной электродвигатель, а также блок управления последним, отличающийся тем, что, с целью повыщения надежности в работе путем улучшения регулирования скорости подачи лесоматериалов, он снабжен датчиком диаметра лесоматериалов и подключенным входами к его выходам блоком определения скорости подачи, выходы которого подключены к входам выбора скоростей блока управления многоскоростным электродвигателем, а входы управления отключением последнего подключены к выходам датчиков нагрузки двигателей пил, причем станок выполнен в виде сле€ щера, а датчик диаметра лесоматериала (Л установлен до пилы для распиловки лесоматериала в наибольщем сечении его распиловки. 00 о ел 00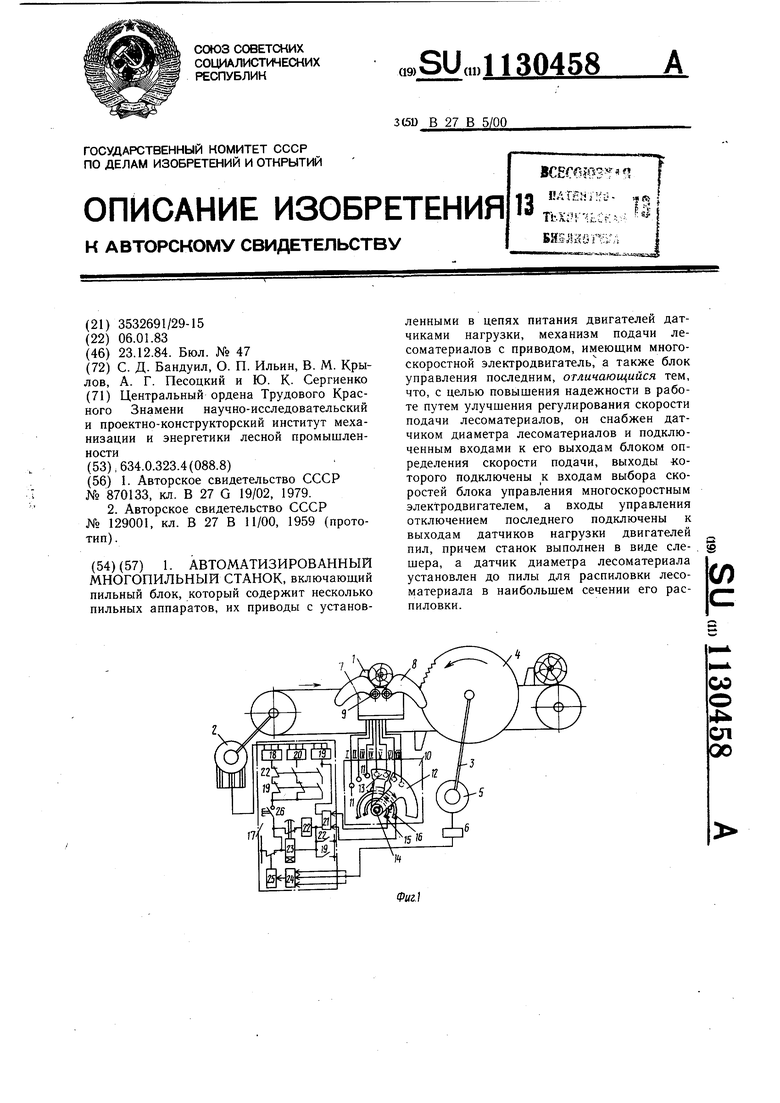
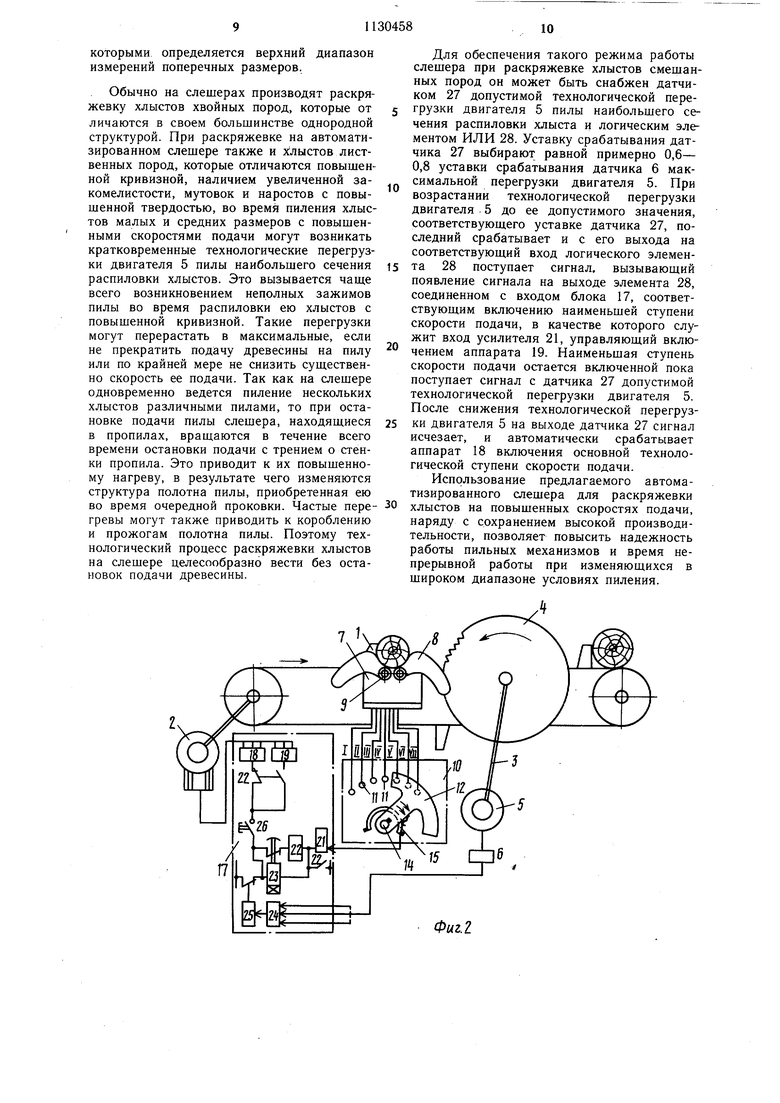
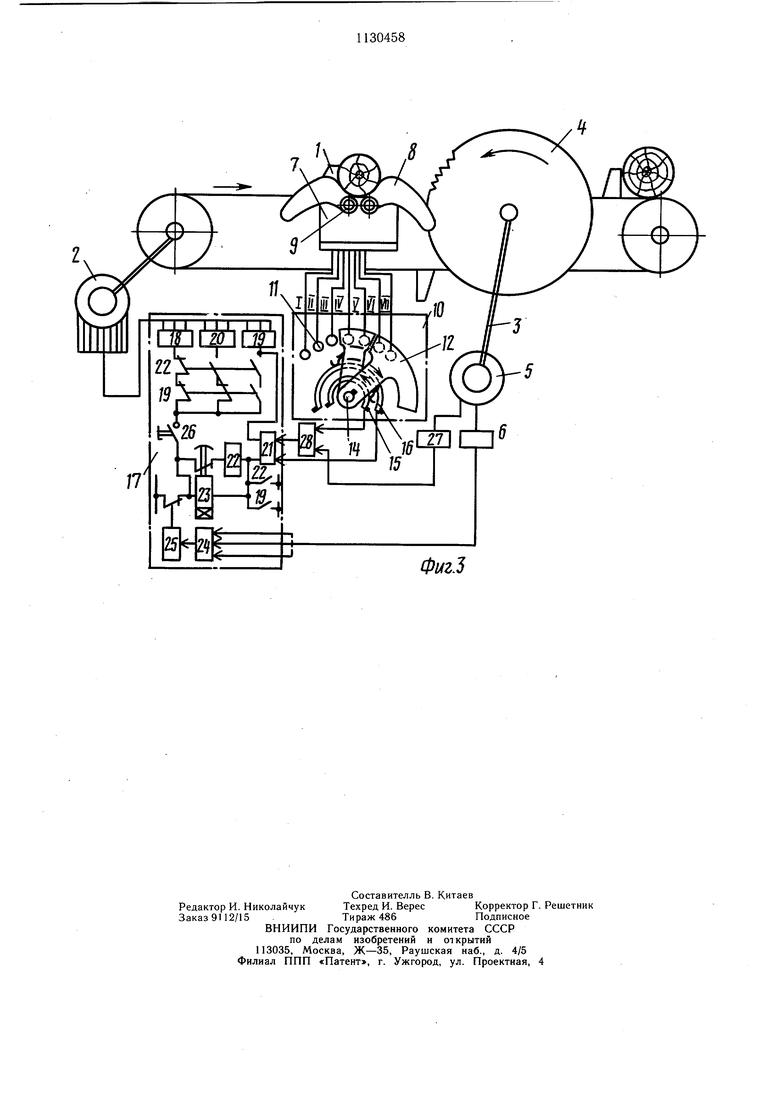
Изобретение относится к лесной промышленности и может быть использовано в установках для поперечной распиловки лесоматериалов круглыми пилами, например, в слешерах. Известен многопильный станок, содержащий механизм подачи лесоматериалов, односкоростной двигатель его привода, блок управления последним, пильные аппараты с имеющими двигатели приводами, датчики максимальной перегрузки двигателей пил и механизмы перемещения пил 1 . Недостатком данного станка является невозможность изменения скорости подачи при изменении нагрузки на приводы пил вследствие меняющихся в зна ительных пределах условий пиления. Известен также автоматизированный многопильный станок, содержащий пильный блок, который содержит несолько пильных аппаратов, их приводы с установленными в цепях питания двигателей датчиками нагрузки, механизм подачи лесоматериалов с приводом, имеющим многоскоростной электродвигатель, а также блок управления последним 2. Однако конструкция известного станка предполагает непрерывное автоматическое регулирование скорости подачи, что при большой инерционности механизма подачи приводит к частым сбоям. Цель изобретения - повышение надежности станка в работе путем улучшения регулирования скорости подачи лесоматериалов. Эта цель достигается тем, что автоматизированный многопильный станок, содержащий пильный блок, который содержит несколько пильных аппаратов, их приввды с установленными в цепях питания двигателей датчиками нагрузки, механизм подачи лесоматериалов с приводом, имеющим многоскоростной электродвигатель, а также блок управления последним, снабжен датчиком диаметра лесоматериалов и подключенным входами к его выходам блоком определения скорости подачи, выходы которого подключены к входам выбора скоростей блока управления многоскоростным электродвигателем, а входы управления отключением последнего подключены к выходам датчиков нагрузки двигателей пил, причем станок выполнен в виде слещера, а датчик диаметра лесоматериала установлен до пилы для распиловки месоматериала в наибольшем сечении его распиловки. Кроме того, станок снабжен датчиком допустимой технологической перегрузки двигателя пилы для распиловки лесоматериала в наибольшем сечении его распиловки и подключенным к нему одним из своих входов элементом ИЛИ, другой вход которого соединен с соответствующим наименьшей скорости выходом блока определения скорости, а выход подключен к входу выбора наименьшей скорости блока управления, многоскоростным двигателем. Блок управления многоскоростным электродвигателем содержит аппараты коммутации электродвигателя, количество которых равно числу скоростей электродвигателя, усилитель, подключенный к его выходу эле мент включения пониженных скоростей, реле времени, размыкающий контакт которого последовательно соединен с элементом включения пониженных скоростей, схему ИЛИ и связанный с ее выходом элемент отключения аппаратов коммутации, причем входами выбора скоростей блока являются входы усилителя, а входами управления отключением - входы схемы ИЛИ, причем выходы элемента включения пониженных скоростей соединены с входами аппаратов коммутации электродвигателя. Блок выбора скоростей выполнен в виде переключателя, причем входы блока выполнены в виде неподвижных контактов, а выходы - в виде подвижных, количество позиций переключателя равно количеству градаций диаметров, а количество его полюсов - количеству пониженных скоростей. На фиг. 1 схематично показан вариант выполнения станка с трехскоростным двигателем привода механизма подачи лесоматериала; на фиг. 2 - то же, с двухскоростным двигателем привода механизма подачи лесоматериала; на фиг. 3 - то же, с трехскоростным двигателем привода механизма подачи лесоматериала и датчиком допустимой технологической перегрузки у двигателя пилы максимального сечения распиловки лесоматериала. Станок (автоматизированный слешер) содержит механизм . подачи лесоматериалов, например подающий транспортер 1, многоскоростной двигатель 2 его привода, например трехскоростной (фиг. 1 и 3) или двухскоростной (фиг. 2) электродвигатели пильные аппараты 3 (показан только один пильный аппарат), включающие пилы 4 и двигатели 5 приводов пил (например, электродвигатели), датчики 6 максимальной перегрузки двигателей 5 (например, реле тока), датчик 7 диаметра лесоматериалов, установленный до пилы для распиловки лесоматериала в наибольщем сечении его распиловки, выполненный, например, со ступенчатым выходом измерительные рычаги 8, закрепленные на валах 9, которые имеют возможность поворачиваться и находятся в исходном положении при отсутствии подаваемого лесоматериала благодаря воздействию на них, например, возвратных пружин, находящихся внутри корпуса датчика 7, блок 10 определения скорости подачи, выполненный, например, на базе переключателя, который . содержит неподвижные контакты 11, служащие входами блока 10, подвижные контакты (контактные секторы) 12 и 13, изолированные один от другого и от приводного вала 14, на котором они закреплены, а также неподвижные щины 15 и 16, по которым скользят пружинные контакты, скрепленные с подвижными контактными секторами 12 и 13, и которые служат выходами блока 10, блок 17 управления многоскоростным электродвигателем, который может содержать, например, аппараты 18, 19 и 20 коммутации электродвигателя для включения соответственно верхней, нижний и средней ступени скорости подачи (например, магнитные пускатели), усилитель 21, элемент 22 включения пониженных скоростей подачи (например, электромагнитное реле), элемент 23 выдержки времени (например, реле времени), логический элемент ИЛИ 24, элемент 25 отключения аппаратов коммутации электродвигателя (например, электромагнитное реле) и аппарат 26 включения привода механизма 1 подачи (например, тумблер). Кроме того, слешер может содержать датчик 27 допустимой технологической перегрузки двигателя 5 пилы 4 для наибольшего сечения распиловки лесоматериала и логический элемент ИЛИ 28. Датчик 7 диаметра лесоматериалов может быть неподвижно установлен на слешере непосредственно до пилы для распиловки наибольшего сечения распиловки лесоматериала либо на некотором расстоянии от плоскости пилы наибольшего сечения распиловки (необходимость установки 7 на некотором расстоянии от пилы может быть вызвана конструктивными особенностями слешера). В последнем слу-. чае датчик 7 тарируется с учетом среднего сбега подлежащих распиловке хлыстов, который имеет место на участке хлыстов от плоскости наибольшего сечения распиловки до места установки датчика 7. Выходы датчика 7, соответствующие заданным ступеням измерения поперечных размеров, соединены с входами блока 10, которыми являются неподвижные контакты 11 (1-VII). Шины 15 и 16, являющиеся выходами блока 10, соединены с входами выбора скорости блока 17, в качестве которых служат входы усилителя 21. Выходы датчиков 6 максимальной перегрузки двигателей 5 пил 4 соединены с входами управления отключением подачи блока 17, в качестве которых служат входы логического элемента ИЛИ 2.4. Выходы блока 17, в качестве которых служат выходы аппаратов 18. 19 и 20, соединены с соответствующими входами многоскоростного двигателя 2 механизма 1 подачи лесоматериалов. В варианте выполнения слешера, представленном на фиг. 3, выход датчика 27 допустимой технологической перегрузки двигателя 5 пилы 4 для распиловки лесоматериалов в наибольщем сечении его распиловки и выход блока 10, соответствующий ступени наименьшей скорости - шина 15, соединены с соответствующим входом блока 17 через логический элемент ИЛИ 28.
Автоматизированный слешер работает следующим образом.
Рассмотрим работу станка с двухскоростным двигателем 2 механизма 1 подачи лесоматериала (фиг. 2) Включают в работу пильный аппарат 3 и подающий транспортер 1 (замыканием аппарата 26). При этом срабатывает аппарат 18 включения верхней ступени скорости двигателя 2 , которая соответствует основной технологической скорости подающего транспортера 1. Последнее связано с тем, чтомелкий и средний лес обычно составляет примерно 75-85 /о разделываемой древесины и может распиливаться на повыщенной скорости подачи. Далее при помощи подвижного контакта 12 блока 10, например, вручную устанавливают диапазоны поперечных размеров подаваемых на раскряжевку хлыстов в наибольшем сечении их распиловки. Границы диапазона измерения устанавливают в зависимости от условий пиления, которые определяются затуплением зубьев пилы, температурой дре весины, ее породой и некоторыми другими факторами.
В процессе раскряжевки хлыстов на автоматизированном слещере диапазоны возможных значений поперечных размеров периодически изменяют в зависимости от изменения с течением времени условий пиления.
При данном варианте выполнения автоматизированного слещера с двухскоростным двигателем 2 подающего транспортера 1 устанавливают два диапазона измерения поперечных размеров распиливаемых хлыстов в наибольшем сечении их распиловки. На фиг. 2 показан один из возможных вариантов установки диапазонов измерения, т. е. одно из возможных положений подвижного контакта (контактного сектора) 12 блока 10. Нижний диапазон включает границы, определяемые ступенями I и 1У измерения поперечных размеров, которые, например равны 40 и 55 см. Верхний диапазон (при равномерном шаге ступеней измерения 5 см) включает границы определяемые ступенями V и VII, которые равны, например, 60 и 70 см.
При поступлении на раскряжевку очередной хлыст подающим транспортером 1 подается на пилу 4. Перед распиловкой хлыст проходит через датчик 7, установленный перед пилой 4.
При своем перемещении хлыст вначале воздействует на первый по ходу измерительный рычаг 8 датчика 7 и утапливает его. При дальнейщем его перемещении подающим транспортером 1 хлыст начинает воздействовать на второй по ходу измерительный рычаг 8, поворачивая его
вокруг оси вала 9, а первый по ходу измерительный рычаг под действием возвратной пружины, стремясь вернуться в исходное положение, прижимается своей рабочей
частью профиля к поверхности хлыста. Когда хлыст оказывается в таком положении, что он симметрично взаимодействует с обоими измерительными рычагами 8 датчика 7, на том выходе этого датчика, который соответствует размеру подаваемого хлыста в наибольшем сечении его распиловки, появляется сигнал. Последний подается на соответствующий вход блока 10. Если, например, сигнал поступает на один из входов I-IV нижнего диапазона измерений,
то при данной конструкции блока 10 он не передается в блок 17, и скорость подающего транспортера 1 не снижается. Следовательно, очередной хлыст распиливается на основной технологической (верхней ступени) скорости подачн. Если из меренный поперечный размер соответствует верхнему диапазону измерений, то при его прохождении через датчик 7 появляется кратковременный сигнал на одном из выходов V-VII датчика, которые соответствуют этому диапазону. Поступив в блок 10 на один из неподвижных контактов V-VII, этот сигнал через подвижный контактный сектор 12 и шину 15, которая служит выходом блока 10, передается на вход блока 17, в качестве которого служит вход
0 усилителя 21. С выхода усилителя 21 параллельно на входы элемента 22 включения пониженных скоростей подачи и элемента 23 выдержки времени поступает управляющий сигнал. Элемент 22 (электромагнитное реле) срабатывает и производит переключение скорости подачи с ее верхней на нижнюю ступень путем отключения аппарата 18 и включения аппарата 19. После срабатывания в результате поступления кратковременного сигнала на его вход
0 элемент 22 (электромагнитное реле) самоблокируется своим замыкающим контактом. Благодаря этому элементы 22 и 23 получают питание до тех пор, пока остается включенным элемент 22. Катушка элемента 22 соединена последовательно м размыкающим контактом элемента 23, имеющим выдержку времени на размыкание. После подачи питания на катущку элемента 23 через интервал времени, равннй уставке этого элемента, ,его контакт размыкается,
0 и элемент 22 отключается. При этом блок 17 автоматически переключает скорость подающего транспортера 1 с нижней на верхнюю ступень, т. е. основную технологическую скорость подачи, путем отключения аппарата 19 и включения аппарата 18.
5 Блок 17 после этого приходит в исходное
состояние и готов по очередной команде,
поступивщей с блока 10, автоматически
. произвести снижение скорости подающего
транспортера 1 на заданный интервал времени.
Сниженне скорости подачи блоком 17 производится на время, которое необходимо для пиления самого крупного хлыста в наибольшем сечении его распиловки, или на время, которое необходимо для пиления такого хлыста и его прохождения через всю зону возможного взаимодействия с пилой наибольшего сечеиня распиловки уже после окончания пиления хлыстов. Интервал времени, в течение которого снижается скорость подаюшего транспортера 1, определяется уставкой элемента 23 выдержки времени, выбираемой в соответствии с конструктивно технологическими требованиями к работе слешера.
С течением времени после установки вновь заточенной пилы 4 в процессе раскряжевки хлыстов в летнее время работы происходит постепенное возрастание затупления ее зубьев, что приводит к ухудшению условий пиления. В зимнее время условия пиления с течением времени ухудшаются еще в большей степени в связи с колебаниями температуры древесины в зависимости от погодных условий и необходимостью вести раз делку мерзлой древесины. Таким образом, периодически происходит ухудшение условий пиления настолько, что при раскряжевке хлыстов, поперечные размеры которых в наибольшем сечении их распиловки равны верхней границе нижнего диапазона измерений (в рассматриваемом случае - lV-й ступени, равной, например, 55 см), это вызывает перегрузку двигателя 5 пилы 4. На выходе датчика 6 максимальной перегрузки двигателя 5 появляется сигнал, который поступает на соответствующий данной пиле вход управления отключением подачи блока 17, в качестве которого служит один из входов логического элемента ИЛИ 24. Последний имеет столько входов, сколько пил содержит слешер. С выхода элемента 24 сигнал поступает на вход элемента 25 отключения подачи, который срабатывает и своим размыкающим контактом отключает питание, всех аппаратов и элементов управления блока 17. В результате любой из аппаратов 18 или 19, который в данный момент включен, отключается сам и отключает двигатель 2 подающего транспортера 1. Этим осуществляется защита пилы 4 от недопустимых максимальных перегрузок. Двигатель 2 остается отключенным до тех пор, пока с датчика 6 максимальной перегрузки двигателя 5 поступает сигнал, что свидетельствует о наличии максимальной перегрузки на двигателе 5 пилы 4. После остановки подающего транспортера 1 пила 4 разгоняется и восстанавливает свою частоту вращения. Нагрузка на двигателе 5 падает и сигнал, поступающий с выхода датчика 6, исчезает. Это приводит к тому, что на выходе элемента ИЛИ 24 также исчезает сигнал и элемент 25 отключается, замыкая свой контакт в цепях питания аппарас тов и элементов управления блока 17. В результате этого срабатывает аппарат 18 и автоматически включает двигатель 2 подающего транспортера 1, после чего происходит допиливание хлыста. Аналогичным путем происходит срабатывание элемента 25
при максимальной перегрузке любой пилы слешера.
Возникновение в процессе пиления пилой наибольшего сечения распиловки хлыста нескольких автоматических остановок по5 дающего транспортера 1 с автоматическим повторным его включением свидетельствует об очередиом ухудшении условий пиления. После этого производят, например, вручную, переключение подвижного контакта (контактного сектора) 12 на одну ступень
0 в сторону уменьшения ступеней измерения, т. е. на одну ступень против часовой стрелки. При этом ступень IV измерения поперечных размеров, которая перекрывается подвижным контактом Г2, уже относится
5 к верхнему диапазону измерений, являясь его нижней границей, а верхней границей верхнего диапазона измерений становится ступень III измерений, равная 50 см. Следовательно, при дальнейшей раскряжевке хлысты с поперечными размерами наиболь0 шего сечения их распиловки, равными 55 см которые соответствуют ступени IV измерений распиливаются на пониженной скоростн подачи. На основной технологической скорости подачи распиливаются только хлысты, поперечные размеры наибольшего сечения
распиловки которых меньше 55 см.
Так, периодически переключая подвижный контактный сектор 12, производят корректировку скорости подачи для раскряжевки хлыстов, поперечные размеры кото0 рых в наибольшем сечении их распиловки относятся к верхней границе нижнего диапазона измереиий. Когда .подвижный контакт 12 находится в крайнем левом положении и перекрывает все неподвижные контакты 11, то все хлысты, поперечные раз меры которых в наибольшем сеченин их распиловки иаходятся между ступенями I и VII измерений, распиливаются с пониженной скоростью подачи. Если при этом в процессе пиления возникают максималь0 ные перегрузки пилы наибольшего сечения распиловки хлыстов и срабатывание зашиты от перегрузок, это свидетельствует о том, что затупление пилы достигло своего максимального значения и ее необходимо заменить острозаточенной. После замены затупленной пилы острозаточенной вновь устанавливают подвижный контакт 12 блока 10 в свое первоначальное положение, когда он перекрывает только ступени V-VII
которыми определяется верхний диапазон измерений поперечных размеров.
Обычно на слешерах производят раскряжевку хлыстов хвойных пород, которые от личаются в своем большинстве однородной структурой. При раскряжевке на автоматизированном слешере также и хлыстов лиственных пород, которые отличаются повышенной кривизной, наличием увеличенной закомелистости, мутовок и наростов с повышенной твердостью, во время пиления хлыстов малых и средних размеров с повышенными скоростями подачи могут возникать кратковременные технологические перегрузки двигателя 5 пилы наибольшего сечения распиловки хлыстов. Это вызывается чаще всего возникновением неполных зажимов пилы во время распиловки ею хлыстов с повышенной кривизной. Такие перегрузки могут перерастать в максимальные, если не прекратить подачу древесины на пилу или по крайней мере не снизить существенно скорость ее подачи. Так как на слещере одновременно ведется пиление нескольких хлыстов различными пилами, то при остановке подачи пилы слещера, находящиеся в пропилах, вращаются в течение всего времени остановки подачи с трением о стенки пропила. Это приводит к их повышенному нагреву, в результате чего изменяются структура полотна пилы, приобретенная ею во время очередной проковки. Частые перегревы могут также приводить к короблению и прожогам полотна пилы. Поэтому технологический процесс раскряжевки хлыстов на слешере целесообразно вести без остановок подачи древесины.
Для обеспечения такого режима работы слешера при раскряжевке хлыстов смешанных пород он может быть снабжен датчиком 27 допустимой технологической перегрузки двигателя 5 пилы наибольшего сечения распиловки хлыста и логическим элементом ИЛИ 28. Уставку срабатывания датчика 27 выбирают равной примерно 0,6- 0,8 уставки срабатывания датчика 6 максимальной перегрузки двигателя 5. При возрастании технологической перегрузки двигателя ,5 до ее допустимого значения, соответствующего уставке датчика 27, последний срабатывает и с его выхода на соответствующий вход логического элемен5 та 28 поступает сигнал, вызывающий появление сигнала на выходе элемента 28, соединенном с входом блока 17, соответствующим включению наименьшей ступени скорости подачи, в качестве которого служит вход усилителя 21, управляющий включением аппарата 19. Наименьшая ступень скорости подачи остается включенной пока поступает сигнал с датчика 27 допустимой технологической перегрузки двигателя 5. После снижения технологической перегрузки двигателя 5 на выходе датчика 27 сигнал исчезает, и автоматически срабатывает аппарат 18 включения основной технологической ступени скорости подачи.
Использование предлагаемого автоматизированного слешера для раскряжевки
0 хлыстов на повышенных скоростях подачи, наряду с сохранением высокой производительности, позволяет повысить надежность работы пильных механизмов и время непрерывной работы при изменяющихся в широком диапазоне условиях пиления.
| I | |||
| Слешер | 1980 |
|
SU870133A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Полуавтоматический агрегат для поперечной распиловки круглого леса | 1959 |
|
SU129001A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
