(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксировочный динамометр | 1978 |
|
SU787914A1 |
| Датчик | 1978 |
|
SU794403A1 |
| Измерительный преобразовательСилы B элЕКТРичЕСКий СигНАл | 1979 |
|
SU815526A2 |
| Устройство для измерения средних значений изменяющихся во времени величин | 1977 |
|
SU746319A1 |
| Цифровой стробоскопический импедансметр | 1978 |
|
SU788035A1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1991 |
|
RU2023978C1 |
| СПОСОБ ВИХРЕТОКОВОЙ ДЕФЕКТОСКОПИИ | 1991 |
|
RU2025724C1 |
| Измеритель толщины покрытия двухслойных диэлектрических материалов | 1981 |
|
SU977935A1 |
| ПУТЕВОЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОСИ КОЛЕСА И СЧЕТА ОСЕЙ | 2000 |
|
RU2206469C2 |
Изобретение относится к измерительной технике и может найтн применение при точном непрерывном измерении в широком диапазоне линейных перемещений.
Известно устройство, использующее дифференциальный индуктивный частотный преобразователь перемещения и содержащее магнитопровод, возбуждающую и измерительную обмотки (11
Недостатками известного устройства являются невысокая точность измерения и малый диапазон измеряемых перемещений.
Наиболее блнзким к изобретению по тех.нической сущности является устройство для измерения перемещений, содержащее несколько каналов измерения, каждый из которь1х . содержит дифференциальный частотный преобразователь перемещения, состоящий из дифференциального индуктивного датчика, двух управляемых генераторов, управляюаще входы которых подключены к выходам датчика, и блока вычитания частот, первый и второй входы которого подключены соответственно к выходу первого н второго генераторов 2.
Недостатками этого устройства являются малая т6 шость измере шя из-за нелинейности характеристики преобразователя и невозможность расширения диапазона измерения за счет увеличения тела каналов измерения.
Цель изобретения - повьиыение точности и расишрение диапазона измерения.
Указаний цель достигается тем, что каждый канал устройства, за исключением канала с наименьщвм пределом измерения, снабжен дополнительным блоком вычитания частот, первый вход которого подключен к выходу дифференциального частотиого преобразователя данного канала, и делителем частоты, вход которого подключен к выходу дифференциального, частотного преобразователя канала с предществу1рщим пределом измерения, а выход - К второму входу дополнительного блока вышташш Частот.
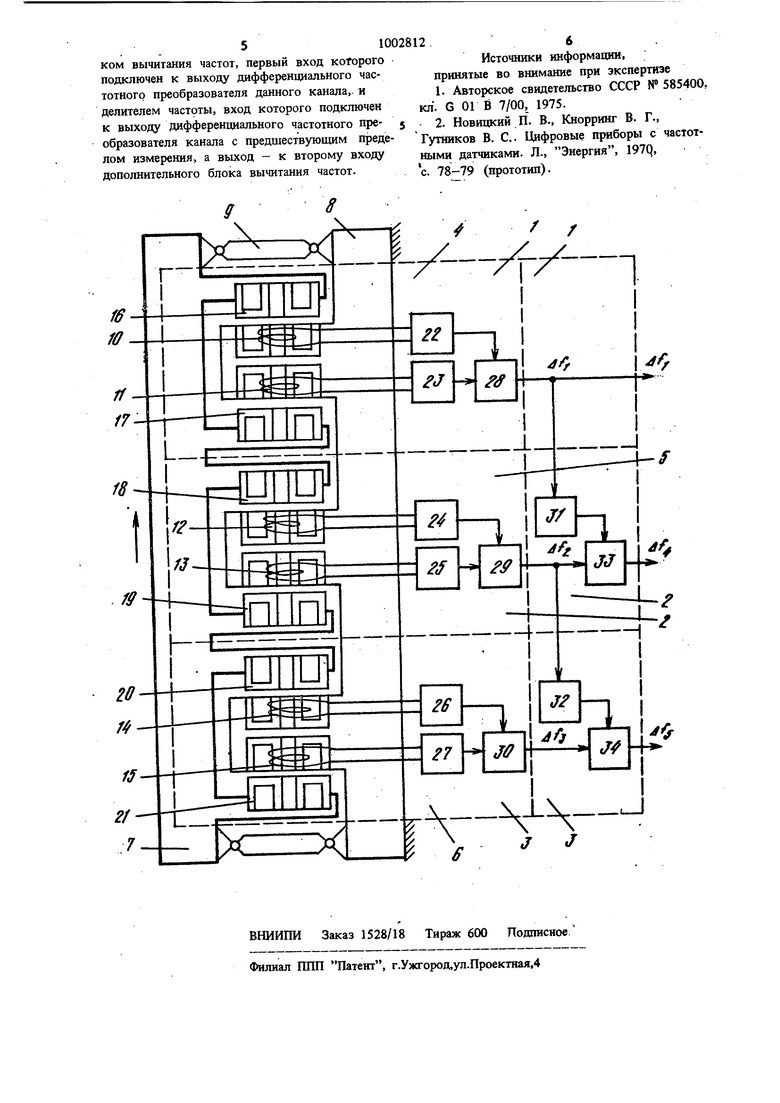
На чертеже приведена блок-схема устройства.
Устройство содержит несколько каналов 1, 2 и 3 измерения, причем канал 1 имеет на3100281именьший, а канал 3 наибольший пределы измерения, каждый из которых содержит дифферендиальный частотный преобразователь 4, 5 и б перемещения, )расположенные на иодвижном 7 и неподвижном 8 основаниях, соединен- j ных упругим- элементом 9. Каждый преобразователь содержит дифференциальный индуктивный датчик, состоящий из катушек 10-15, индуктивности и замыкающих сердечников 16-21 магнитной системы катушек, to 1 Каналы измерения содержат также управляемые генераторы 22-27, блоки 28, 29 и 30 вычитания частот, делители 31 и 32 частоты, дополнительные блоки 33 и 34 вычитания чаКатушки 10-15 выполнены, например, на основе броневых ферритовых сердечников и жестко укреплены на неподвижном основании 8, их замыкающие сердечники 16-21 жестко связаны с подвижным основанием 7 так, что 20 в исходном состоянии начальные зазоры магнитных систем катушек индуктивности, стоящих в разных каналах, оказываются различными, причем поддиапазону с большим пределом соответствует и больший начальный зазор. Устройство работает следующим образом. В каждом канале под действием измеряемо го перемещения на такую .же величину перемещаются замыкающие магнитопроводы сердечники катушек, например замыкающие сердечники 16 и 17 катушек 10 и И в канале 1, что приводит к изменению зазоров магнито проводов, причем в одной катушке (10) зазо увелигшвается, а в другой (11) - уменьшает ся, это, в свою очередь, приводит к изменению частот управляемых генераторов 22 и 23. Выходные напряжения управляемых гене{Яторов, например 22 и 23, поступают на входы блока 28 вычитания частот, на выходах этих блоков вьщеляется сигнал разностной частоты Afj, являющейся выходным сигналом дифференциального частотного датчика i-ro ка нала. Разностная частота Af j с выхода дифферен; циального индуктивного частотного преобразов теля 4 перемещения канала 1 с наименьшим пределом измерения перемещения используется как выходной информативньш параметр младщего поддиапазона и по линиям связи передается к цифровому частотомеру. Кроме того, разностная частота Af.i канала I после деления на коэффициент ni дискретным дели телем 31 частоты поступает на вход дополнительной Цепи блока 33 вычитания частот в канале 2 и используется для повышения лине ности характеристики канала 2 путем смешивания частот.Дi |h и Afj и вьщеления на выходе блока 33 разности частот Af4, прини154 маемой за выходной информативный параметр канала 2. За счет выбора соответствующего коэффициента деления nj дискретного делителя 31 частоты а и варьирования, например, начальной частоты f о i не будет содержаться членов разложения в степенной ряд характеристики преобразования канала 2, пропорциональных относительному перемещению X вплоть до пятой степени (квадратичного, кубичного и члена четвертой степени), т.е. частота Af4 оказывается пропорциональной измеряемому перемещению с высокой степенью точности, а значит использование ее в качестве выходного информативного параметра канала 2 позволяет при заданной погрешности линейности значительно расширить рабочий поддиапазон данного канала. Аналогично, разностная частота Afs дифференциального индуктивного частотного преобразователя 5 перемещения канала 2 после деления на коэффициент nj дискретным делителем 32 частоты подается на вход дополнительной цепи вычитания частот в кан.але 3 и используется для повышения линейности характеристики и расширения рабочего поддиапа зона канала 3. Таким образом, в описанном устройстведля измерения перемещений в каждом канале. за исключением канала с меньшим пределом измерения, путем смещивания выходной частоты дифференциального частотного преобразователя данного канала и поделенной частоты дифференциального частотного преобразователя предшествующего канала с меньшим пределом измерения осуществляется значительное расширение рабочего диапазона измерения перемещений, а также повышается точность измерения за счет расширения линейного участка характеристики преобразования. Формула изобретения Устройство для измерения перемещений, содержащее несколько каналов измерения, каждый из которых содержит дифференциальный частотный преобразователь перемещения, состоящий из дифференциального индуктивного датчика, двух управляемых генераторов, управляющие входы которых подключены к выходам датчика, и блока вычитания частот, первый и второй входы которого подключены соответственно к выходу первого и второго генераторов, отличающееся тем. q-jo, с целью повьпыения точности и расширения даапазона измерения, каждый его канал, за исключением канала с наименьшим пределом измерения, снабжен дополнительным блоком вычитания частот, первый вход которого подключен к выходу дифференциального частотного преобразователя данного канала, и делителем частрты, вход которого подключен к выходу дифференциального частотного преобразователя канала с предшествующим пределом измерения, а выход - к второму входу дополнительного блока вычитания частот.
Источники информации, принятые во внимание при экспертизе
с. 78-79 (прототип).
