Изобретение относится к системам и устройствам, обеспечивающим сброс груза с самолета, в частности к устройствам для контроля и регистрации положения и скорости движения груза в грузовом отсеке, а также для коррекции работы системы управления самолетом в зависимости от изменения его центра тяжести при изменении положения груза.
Цель изобретения повышение достоверности контроля состояния груза в процессе его перемещения в грузовом отсеке летательного аппарата.
Указанная цель достигается тем, что в устройство для контроля сброса груза с летательного аппарата, содержащее приемный блок, имеющий бесконтактный датчик положения груза в грузовом отсеке и одновибратор, счетчик импульсов, цифроаналоговый преобразователь, усилитель мощности, пульт управления, блок управления рулями высоты и блок световой сигнализации положения груза, причем выход усилителя мощности соединен с первым входом блока управления рулями высоты, введены блок контроля каналов световой сигнализации, временной распределитель, задатчик режима работы, регистратор состояния груза и n диодов, при этом приемный блок выполнен в виде n каналов передачи сигналов, каждый канал которого содержит последовательно соединенные бесконтактный датчик положения груза в грузовом отсеке, усилитель, компаратор, причем первый выход пульта управления соединен с первым входом блока световой сигнализации положения груза, вторые n входов которого соединены с выходами n компараторов, второй выход пульта управления соединен с входом блока контроля каналов световой сигнализации, выход которого соединен с анодами n диодов, катоды которых соединены с входами n усилителей, вход пульта управления соединен с выходом задатчика режима работы, третий выход пульта управления соединен с вторым входом регистратора состояния груза, первый вход которого соединен с выходом цифроаналогового преобразователя, который соединен с входом усилителя мощности, первый вход счетчика импульсов и вход временного распределителя соединены с выходами n одновибраторов, выход временного распределителя соединен с вторым управляющим входом счетчика импульсов, выход которого соединен с входом цифроаналогового преобразователя, а четвертый выход пульта управления соединен с вторым входом блока управления рулями высоты.
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит приемный блок 1, имеющий n каналов передачи сигналов, каждый канал которого содержит последовательно соединенные бесконтактный датчик 2 положения груза в грузовом отсеке, усилитель 3, компаратор 4, блок 5 дифференцирования и одновибратор 6. Выходы с одновибраторов 6 подключены к первому входу счетчика 7 импульсов и входу временного распределителя 8, выход которого соединен с вторым управляющим входом счетчика 7 импульсов. Выход счетчика 7 импульсов соединен с входом цифроаналогового преобразователя 9, выход которого подключен к первому входу регистратора 10 состояния груза, а также через усилитель 11 мощности к первому входу блока 12 управления рулями высоты подключен к четвертому выходу пульта 13 управления, первый выход которого соединен с первым входом блока 14 световой сигнализации положения груза, вторые n входов которого соединены с соответствующими n выходами компараторов 4. Второй выход пульта 13 управления соединен с входом блока 15 контроля каналов световой сигнализации, выход которого соединен с анодами n диодов 16, катоды которых соединены с входами n усилителей 3. Третий выход пульта 13 управления соединен с вторым входом регистратора 10 состояния груза. Вход же пульта 13 управления соединен с выходом задатчика 17 режима работы устройства.
Устройство работает следующим образом.
Бесконтактные датчики 2 положения груза в грузовом отсеке трансформаторного типа, выполненные на Ш-образном магнитопроводе с разомкнутой магнитной системой и установленные на роликовых дорожках между роликами, запитываются источником переменного тока. Изменение воздушного зазора магнитной системы датчика из-за наличия или отсутствия над ним стальной лыжи грузовой платформы, которая может стоять или передвигаться по роликовым дорожкам, приводит соответственно к наличию или отсутствию на его вторичной обмотке сигнала, который после выпрямления поступает на выход датчика 2 положения груза в грузовом отсеке. Так как лыжи грузовой платформы перекрывают одновременно несколько датчиков, то чем длиннее платформа, тем с большего количества датчиков идет рабочий сигнал.
Сигналы с датчиков 2 положения груза в грузовом отсеке, над которыми находится грузовая платформа, поступают на соответствующие своим каналам усилители 3, выходы которых соединены с входами компараторов 4, пороги срабатывания которых установлены с помощью делителей, запитанных от источника питания. С выхода компараторов 4 сигналы поступают на блок 14, где загорается светодиод соответствующего канала, и на блоки 5 дифференцирования, сигналы на выходе которых появляются только в момент схода лыжи платформы с датчиков 2 положения груза в грузовом отсеке. Сигналами с блоков 5 дифференцирования запускаются одновибраторы 6, которые формируют короткие импульсы, поступающие на общий вход счетчика 7 импульсов, а также на вход временного распределителя 8, который после прихода последнего импульса через заданное время обнуляет счетчик 7 импульсов, подготавливая, тем самым, устройство к регистрации сброса следующего груза. Сигнал со счетчика 7 импульсов в двоичном коде поступает на вход цифроаналогового преобразователя 9. Аналоговый сигнал, пропорциональный количеству импульсов, т. е. количеству задействованных датчиков 2 положения груза в грузовом отсеке в процессе движения грузов с цифроаналогового преобразователя 9 поступает на регистратор 10 состояния груза, а также через усилитель 11 мощности на блок 12 управления рулями высоты, включение в работу которого, так же как регистратора 10 состояния груза, блока 14 световой сигнализации положения груза и блока 15 контроля каналов световой сигнализации происходит с пульта 13 управления. Блок 15 контроля каналов световой сигнализации при его включении выдает сигнал, который через диоды 16 поступает на входы всех усилителей 3, тем самым проверяется работа всех каналов. Включение того или другого блока с пульта 13 управления осуществляется оператором или автоматически, по заданной на пульте 13 программе, задатчиком 17 режима работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРИТИЧЕСКОЙ ЧАСТОТЫ СЛИЯНИЯ СВЕТОВЫХ МЕЛЬКАНИЙ | 2001 |
|
RU2205596C2 |
| Устройство для оценки профессиональной пригодности операторов | 1989 |
|
SU1714647A1 |
| Устройство для формирования телеграфных сообщений | 1984 |
|
SU1220134A1 |
| Устройство для контроля работы сельскохозяйственных агрегатов | 1983 |
|
SU1138062A1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ПО ПРОВОДНЫМ ЛИНИЯМ СВЯЗИ | 1967 |
|
SU215063A1 |
| СИСТЕМА УПРАВЛЕНИЯ СОРТИРОВКОЙ НАРЕЗАННОГО КАРТОФЕЛЯ | 1990 |
|
RU2016670C1 |
| МНОГОКАНАЛЬНОЕ АКУСТИКО-ЭМИССИОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ | 1995 |
|
RU2105301C1 |
| ВИБРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2319210C1 |
| Импульсный спектрометр ядерного магнитного резонанса | 1985 |
|
SU1318875A1 |
| Устройство для контроля работы широкозахватных сельскохозяйственных агрегатов | 1980 |
|
SU917744A1 |
Изобретение относится к системам и устройствам, обеспечивающим сброс груза с самолета, в частности к устройствам для контроля и регистрации положения и скорости движения груза в грузовом отсеке самолета. Цель изобретения повышение достоверности контроля состояния груза в процессе его перемещения в грузовом отсеке летательного аппарата. Для этого в устройство вводят блок контроля каналов световой сигнализации 15, временной распределитель 8, задатчик режима работы 17, регистратор состояния груза 10 и N диодов 16, при этом приемный блок 1 выполнен в виде n каналов передачи сигналов, каждый канал которого содержит последовательно соединенные бесконтактный датчик положения груза 2 в грузовом отсеке, усилитель 3, компаратор 4, блок дифференцирования 5 и одновибратор 6. 1 ил.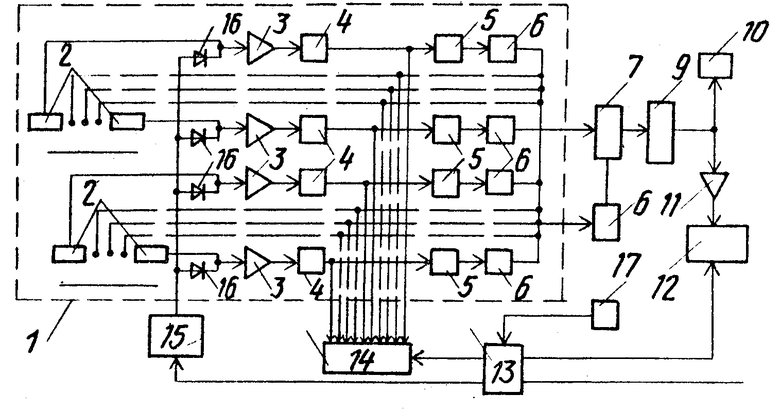
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СБРОСА ГРУЗА С ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее приемный блок, содержащий бесконтактный датчик положения груза в грузовом отсеке и одновибратор, счетчик импульсов, цифроаналоговый преобразователь, усилитель мощности, пульт управления, блок управления рулями высоты и блок световой сигнализации положения груза, причем выход усилителя мощности соединен с первым входом блока управления рулями высоты, отличающееся тем, что, с целью повышения достоверности контроля состояния груза в процессе его перемещения в грузовом отсеке летательного аппарата, в него введен блок контроля каналов световой сигнализации, временной распределитель, задатчик режима работы, регистратор состояния груза и n диодов, при этом приемный блок выполнен в виде n каналов передачи сигналов, каждый канал которого содержит последовательно соединенные бесконтактный датчик положения груза в грузовом отсеке, усилитель, компаратор, блок дифференцирования и одновибратор, причем первый выход пульта управления соединен с первым входом блока световой сигнализации положения груза, вторые n входов которого соединены с выходами n компараторов, второй выход пульта управления соединен с входом блока контроля каналов световой сигнализации, выход которого соединен с анодами n диодов, катоды которых соединены с входами n усилителей, вход пульта управления соединен с выходом задатчика режима работы, третий выход пульта управления соединен с вторым входом регистратора состояния груза, первый вход которого соединен с выходом цифроаналогового преобразователя, который соединен с входом усилителя мощности, первый вход счетчика импульсов и вход временного распределителя соединены с выходами n одновибраторов, выход временного распределителя соединен с вторым управляющим входом счетчика импульсов, выход которого соединен с входом цифроаналогового преобразователя, а четвертый выход пульта управления соединен с вторым входом блока управления рулями высоты.
| Авторское свидетельство СССР N 478494, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
