ел С
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-измерительное устройство | 1987 |
|
SU1718735A3 |
| Комбинированный подшипниковый узел с вертикальной осью вращения | 1986 |
|
SU1771523A3 |
| Устройство для центрирования и нивелирования объекта | 1987 |
|
SU1672934A3 |
| Устройство для выполнения метрологических операций на объекте | 1987 |
|
SU1623573A3 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНЫХ ХАРАКТЕРИСТИК | 1992 |
|
RU2124701C1 |
| Устройство для определения коэффициента средней длины волны | 1976 |
|
SU657769A3 |
| Устройство для определения спектра зависимой переменной | 1971 |
|
SU591160A3 |
| СИСТЕМА ЗАПИСИ СЕРВОДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАКОПИТЕЛЯХ НА ДИСКАХ | 1995 |
|
RU2141691C1 |
| Устройство для измерения перемещения объекта | 1990 |
|
SU1779923A1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
Изобретение относится к измерению скоростей, в частности к измерению скорости подвижного элемента (датчика) в сервосистемах. Цель изобретения - повышение точности измерений. Устройство для измерения скорости подвижного элемента сервосистемы содержит 1 блок (1) переключения, 2 дифференцирующих элемента (2), 1 блок (3) деления, 1 выходную шину (4). 1 компаратор (5), 1 блок (6) формирования двух квадратных сигналов. 6-1-2-3-4. 6-5- 1-3, 1 з.п. ф-лы, 4 ил.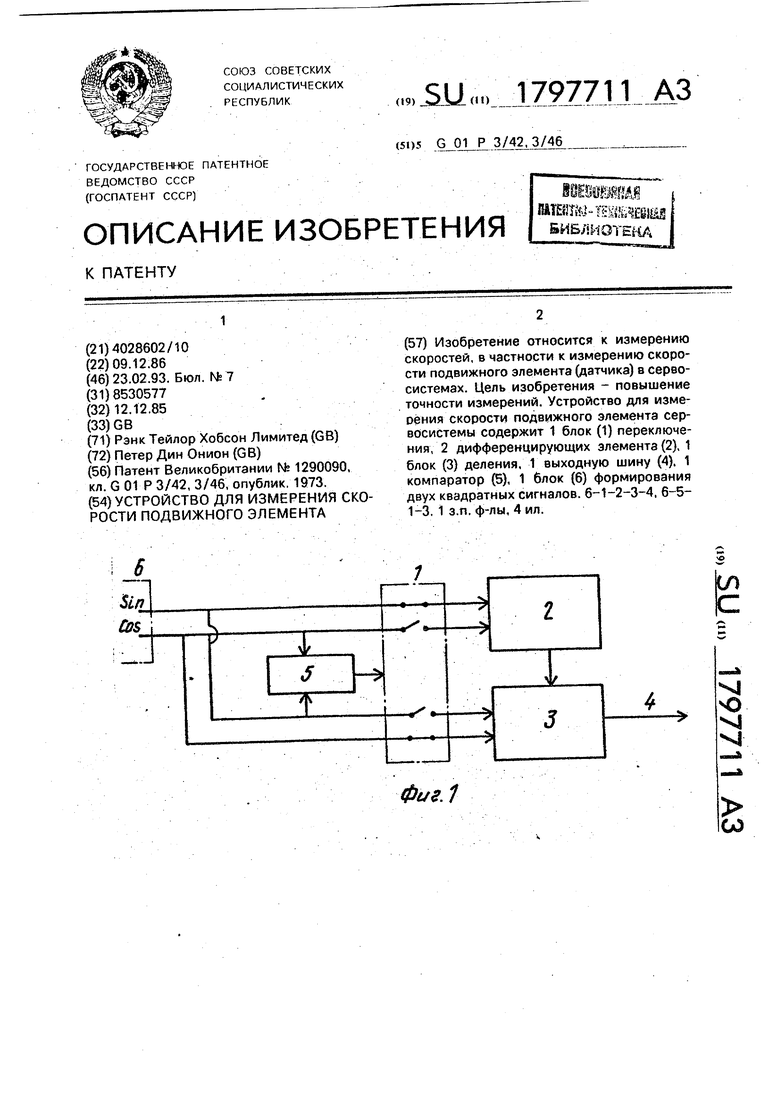
xi
ю
4 х|Фиг.1
ы
Изобретение относится к измерению скоростей, в частности к измерению скорости подвижного элемента (датчика) в сервосистемах.
Известно устройство для измерения от- носительной скорости перемещения двух элементов в сервосистеме, содержащее блок формирования двух квадратных сигналов скорости и схему обработки с использованием дифференцирующих элементов, комму- татора, компаратора.сумматора для выделения сигнала ошибки, используемого для управления двигателем, две обмотки на статоре и роторе которого используются в качестве датчика (блока формирования квадратур- ных сигналов)
Данное устройство наиболее близко к предлагаемому, однако данное устройство обладает дополнительной погрешностью, связанной с наличием пульсирующей со- ставляющей в дифференцированном сигнале управления скоростью, которую можно скомпенсировать лишь при условии нулевой погрешности скорости, В реальных устройствах это условие не соблюдается, что приводит к возникновению пульсаций управляющего сигнала и, следовательно, снижению точности измерений.
Целью изобретения является повышение точности измерения.
Поставленная цель достигается тем, что в устройство для измерения скорости подвижного элемента сервосистемы, содёр- жащее блок формирования двух квадратурных сигналов скорости, двумя вы- ходами связанный с соответствующими входами блоков формирования первого и второго сигналов, компаратор, выходом соединенный с управляющим входом блока переключения, дифференцирующий эле- мент и выходную шину, введен блок деле- ния, а блок формирования двух квадратурных сигналов скорости выполнен в виде оптической решетки и первого и второго преобразователей, установленных с возможностью приема света от оптической решетки, блок формирования первого сигнала выполнен в виде первой группы блока переключения, выходами подключенной к входам дифференцирующего элемента, блок формирования второго сигнала выполнен в виде второй группы блока переключения и компаратора, при этом выходы первого и второго преобразователей блока формирования двух квадратурных сигналов скорости подключены соответственно к первым и вторым входам блока переключения, соединены соответственно с первым и вторым входами компаратора блока форми- рования второго сигнала, а выход дифференцирующего элемента и выходы второй группы блока переключения соединены через блок деления с выходной шиной.
Кроме того, решетка установлена на поворотном элементе или выполнена в виде линейной решетки.
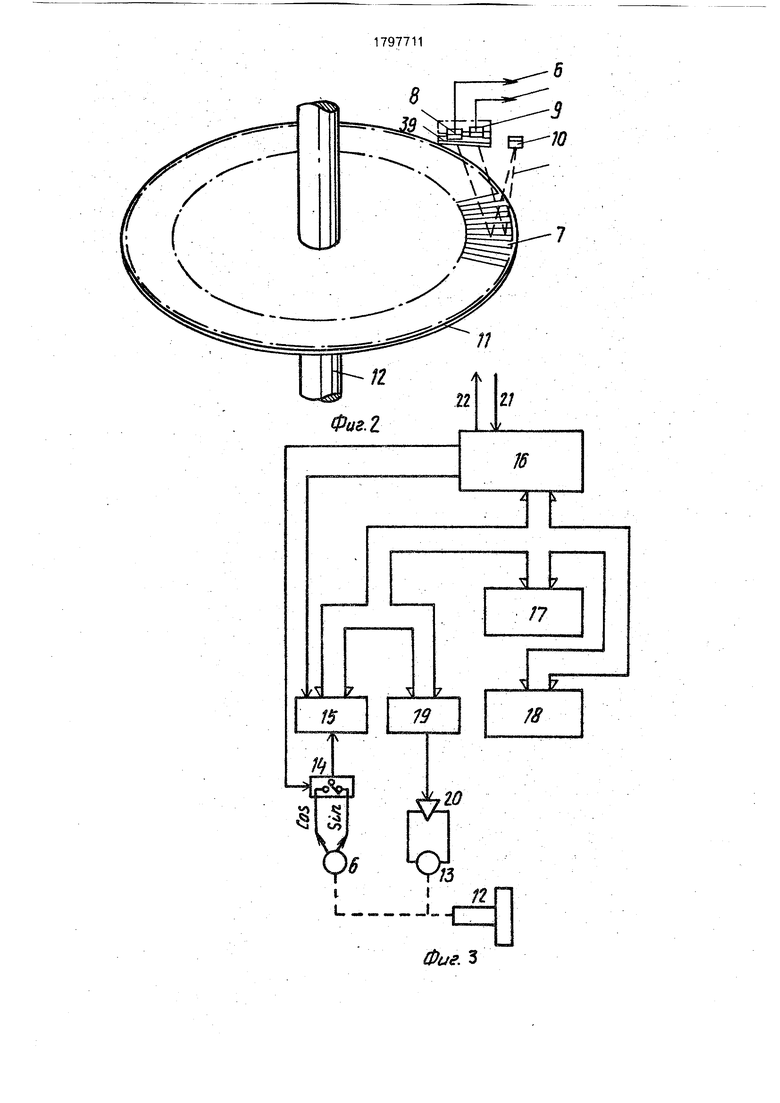
На фиг.1 показана общая структурная схема устройства для измерения скорости; на фиг.2 - пример выполнения блока формирования двух квадратурных сигналов скорости; на фиг.З - пример выполнения устройства с использованием микропроцессора; на фиг.4 - альтернативный вариант выполнения с использованием средств аналоговой техники.
Устройство для измерения скорости подвижного элемента применительно к микропроцессорному и аналоговому вариантам может быть выполнено в виде блока 1 переключения, подключенного выходами первой и второй групп соответственно к дифференцирующему элементу 2 и блоку 3 деления, соединенному выходам с выходной шиной 4. Компаратор 5 включен между соответствующими выходами блока 6 формирования двух квадратных сигналов скорости и управляющим входом блока 1 переключения.
Блок 6 может быть выполнен в виде оптической решетки 7 (фиг.2) и двух преобразователей 8, 9 установленных с возможностью приема света от решетки 7, падающего на нее от источника 10 света. При этом решетка 7 может быть выполнена на диске 11, установленном на валу 12. На диске 11, используемом в качестве стола, могут быть установлены обрабатываемые детали (на чертеже не показаны). Решетка 7 может быть выполнена в виде отражающих и неотражающих штрихов, равномерно распределенных по периферии диска 11.
Вал 12 приводится в действие при помощи электродвигателя 13 (фиг.З). Сигналы на выходах блока 6 передаются через переключатель 14 к аналого-цифровому преобразователю 15. Микропроцессор (МП) 16, управляющий посредством программы, хранимой в ЗУПВ 17, приводит в действие переключатель 14, передает сигналы от преобразователей в параллельной форме к постоянному запоминающему устройству (ПЗУ) 18 и параллельно цифровые сигналы регулирования скорости к цифровому преобразователю 19 (ЦАП), выход которого связан через усилитель 20 мощности с электродвигателем 13, МП 16 принимает последовательные цифровые командные сигналы задания скорости и вычисляет управляющий сигнал (шина 21). Выход 22 МП 1.6 предусмотрен для вывода цифровых
данных, показывающих, например, что вал 12 вращается с заданной скоростью.
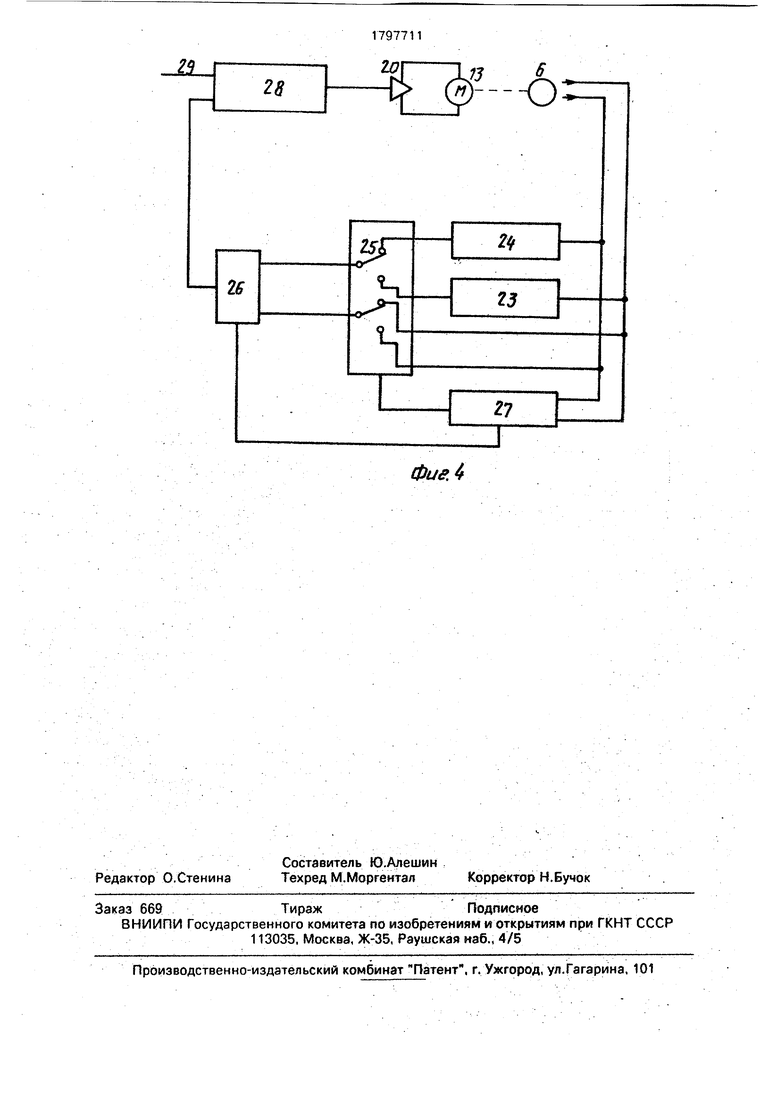
На фиг.4 показан альтернативный вариант выполнения схемы с использованием аналоговых средств. Выходы блока 6 связаны через неинвертирующий и инвертирующий дифференцирующие элементы 23, 24 и переключатель 25 (его первую группу) с входом числителя блока 16 деления, вход знаменателя которого соединен через вторую группу переключателя 25 с соответствующими выходами блока б. Коммутатор 27 управляет переключателем 25 и блоком 26 деления. Положение переключателя 25 позволяет исключить появление нулевых значений на выходах этого переключателя в моменты, когда один из выходных сигналов
Формула изобретения 1. Устройство для измерения скорости подвижного элемента сервосистемы, содержащее блок формирования двух квадратурных сигналов скорости, двумя выходами связанный с соответствующими входами блоков формирования первого и второго сигналов, компаратор, выходом соединенный с управляющим входом блока переключения, дифференцирующий элемент и выходную шину, отличающееся тем, что, с целью повышения точности измерения, в него введен блок деления, а блок формирования двух квадратурных сигналов скорости выполнен в виде оптической ре- щетки и первого и второго преобразователей, установленных с возможностью приема света от оптической решетки, блок формирования первого сигнала выполнен в виде первой группы блока переключения,
блока 6 имеет максимальную величину, а другой - нулевую.
Выходной сигнал блока 26 деления поступает через усилитель 28 и усилитель 20
мощности к электродвигателю 13. Усилитель 28 также принимает сигнал запроса по шине 29.
В показанных вариантах вырабатывают непрерывные синусоидальные и косинусоидальние сигналы, однако достаточно сформировать требуемую часть сигнала из квадратных сигналов в момент, когда требуется вычисление скорости.
Изобретение может быть использовано
и для случая формирования квадратурных сигналов из неквадратурных, если известна погрешность фазировки.
выходами подключенный к входам дифференцирующего элемента, блок формирования второго сигнала выполнен в виде второй группы блока переключения и компаратора, при этом выходы первого и второго преобразователей блока формирования двух квадратурных сигналов скорости подключены соответственно к первым и вторым входам двух групп блока переключения, соединены соответственно с первым и вторым входами компаратора блока формиро- ван ия второго сигнала, а выход дифференцирующего элемента и выходы второй группы блока переключения соединены через блок деления с выходной шиной.
/«. 3
Ј2
2
is
w
o
$ .ffi-Q
#
25
/
| Устройство для измерения двулучепреломления отражательных оптических носителей информации | 1985 |
|
SU1290090A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
