Изобретение относится к измеритель- . ной технике и может быть использовано для контроля размеров, шероховатости, отклонений расположения и формы поверхностей деталей в автоматическом режиме.
Известно устройство, содержащее основание, средства для базирования и перемещения контролируемой детали, датчик, средство перемещения датчика, блоки регистрации сигналов датчика и величины перемещения датчика и контролируемой детали, а также блок управления, обеспечивающий перемещение датчика по поверхности детали со скоростью, определяемой крутизной профиля изделия.
Однако данное устройство не обеспечивает высокой точности контроля вследствие неоптимального положения измерительного наконечника относительно поверхности детали и не позволяет осуществлять комплексный контроль в автоматическом режиме.
Наиболее близким по технической сущности к предлагаемому является контрольно-измерительное устройство, содержащее основание, размещенную на нем с возможностью вращения вокруг своей оси опору для детали, привод для вращения опоры, датчик с наконечником для измерения поверхности детали, установленную на основании колонну, размещенную на колонне с возможностью продольного перемещения и фиксации каретку, установленную на каретке с возможностью продольного перемещения и фиксации штангу, .несущую датчик, приводы для перемещения соответственно
00 XI 00 (Я
GJ
каретки и штанги, связанный с датчиком измерительно-вычислительный блок и средство управления приводами.
Данное устройство имеет широкие метрологические возможности, является авто- матизированным. Однако его точность измерения недостаточно высока, невозможно контролировать абсолютные размеры. Датчик устройства имеет малую универсальность. .
Целью изобретения является повышение точности и информативности измерений.
Цель достигается тем, что в контрольно- измерительном устройстве, содержащем основание, размещенную на нем с возмож- нортью вращения вокруг своей оси опору для детали, привод для вращения опоры, датчик с наконечником для измерения поверхности детали, установленную на осно- вании колонну, размещенную на колонне с возможностью продольного перемещения и фиксации каретку, установленную на каретке с возможностью продольного перемещения и фиксации штангу, несущую датчик. приводы для перемещения соответственно каретки и штанги, связанный с датчиком измерительно-вычислительный блок и средство управления приводами, дополнительно содержатся средства контроля положения каретки, штанги и опоры, связанные с измерительно-вычислительным блоком, который соединен со средством управления приводами. При этом измеритель- но-вычислител ьный блок и средство управления приводами предназначены для обеспечения постоянной скорости пересечения наконечником датчика поверхности детали. Кроме того, датчик с наконечником может быть установлен с возможностью вращения вокруг своей продольной оси и фиксации.
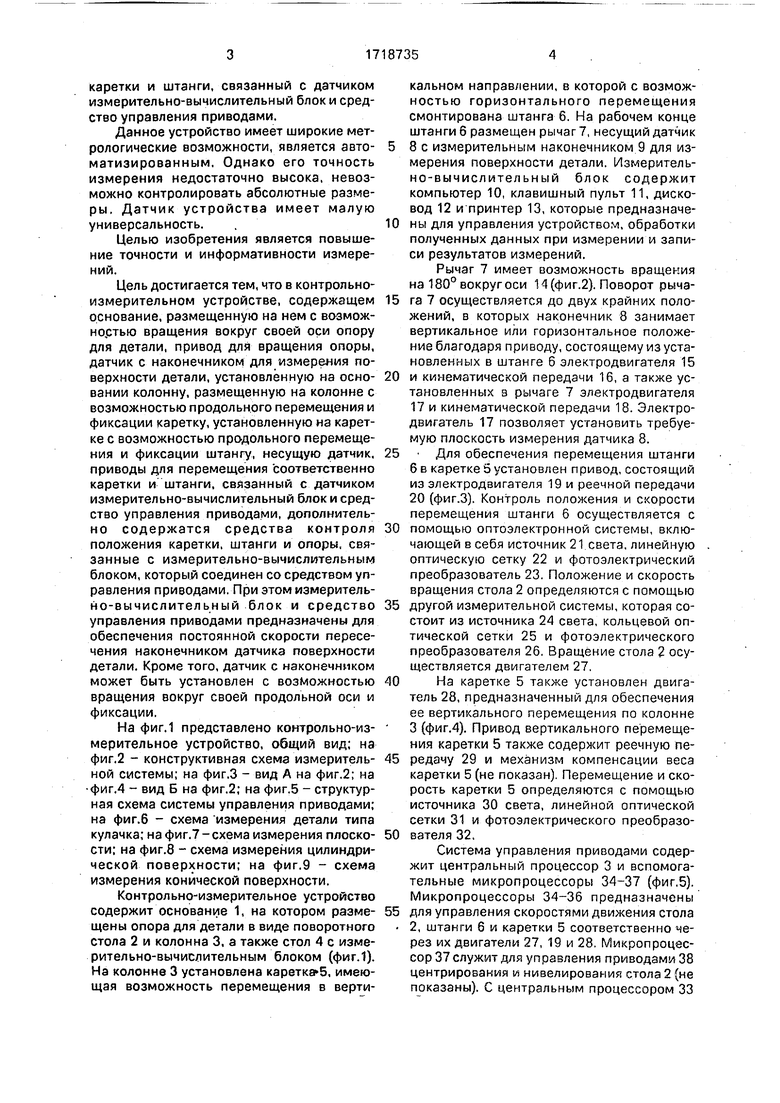
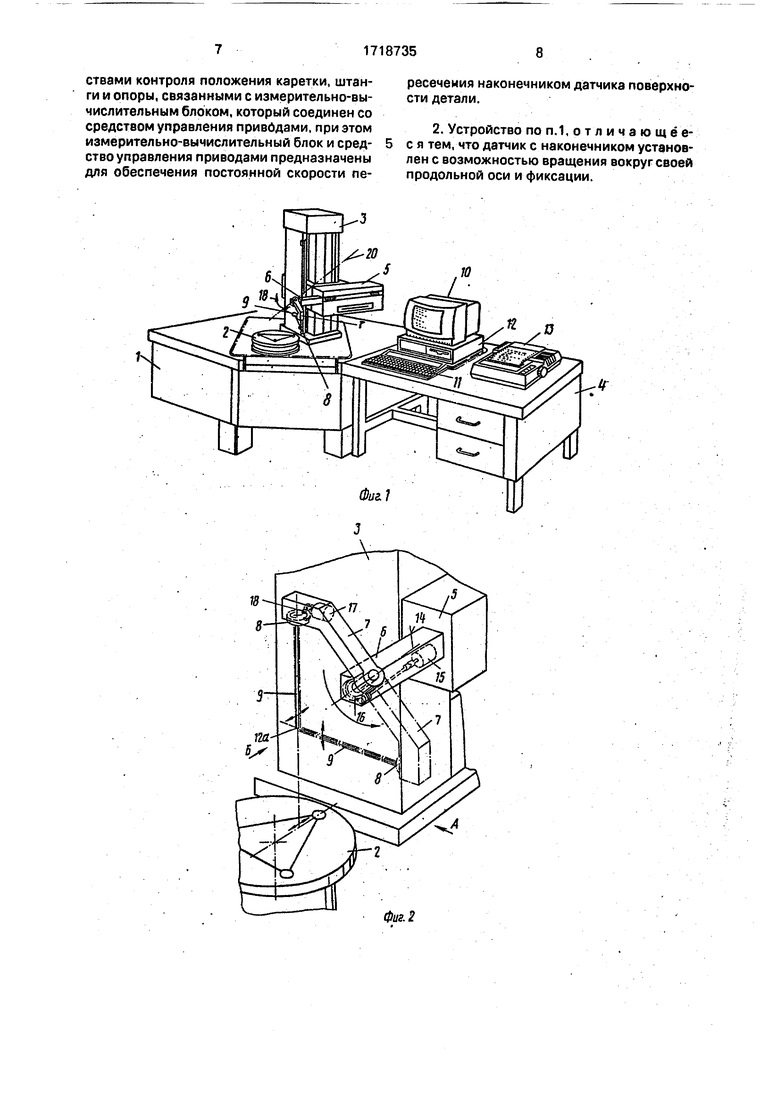
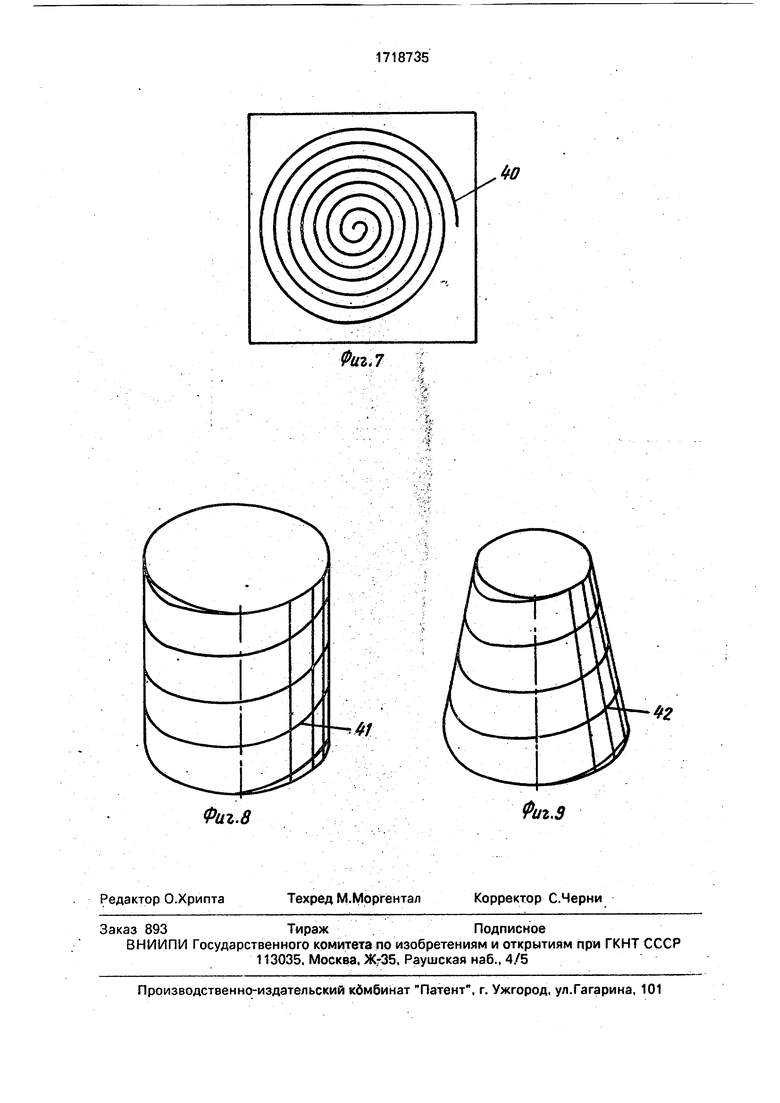
На фиг.1 представлено контрольно-из- мерительное устройство, общий вид; на фиг.2 - конструктивная схема измеритель- ной системы; на фиг.З - вид А на фиг.2; на фиг.4 - вид Б на фиг.2; на фиг.5 - структурная схема системы управления приводами; на фиг.б - схема измерения детали типа кулачка; на фиг.7 - схема измерения плоско- сти; на фиг.8 - схема измерения цилиндрической поверхности; на фиг.9 - схема измерения конической поверхности.
Контрольно-измерительное устройство содержит основание 1, на котором разме- щены опора для детали в виде поворотного стола 2 и колонна 3, а также стол 4 с измерительно-вычислительным блоком (фиг.1). На колонне 3 установлена каретка 5, имеющая возможность перемещения в вертикальном направлении, в которой с возможностью горизонтального перемещения смонтирована штанга 6. На рабочем конце штанги б размещен рычаг 7, несущий датчик 8 с измерительным наконечником 9 для измерения поверхности детали. Измерительно-вычислительный блок содержит компьютер 10, клавишный пульт 11, дисковод 12 и принтер 13, которые предназначены для управления устройством, обработки полученных данных при измерении и записи результатов измерений.
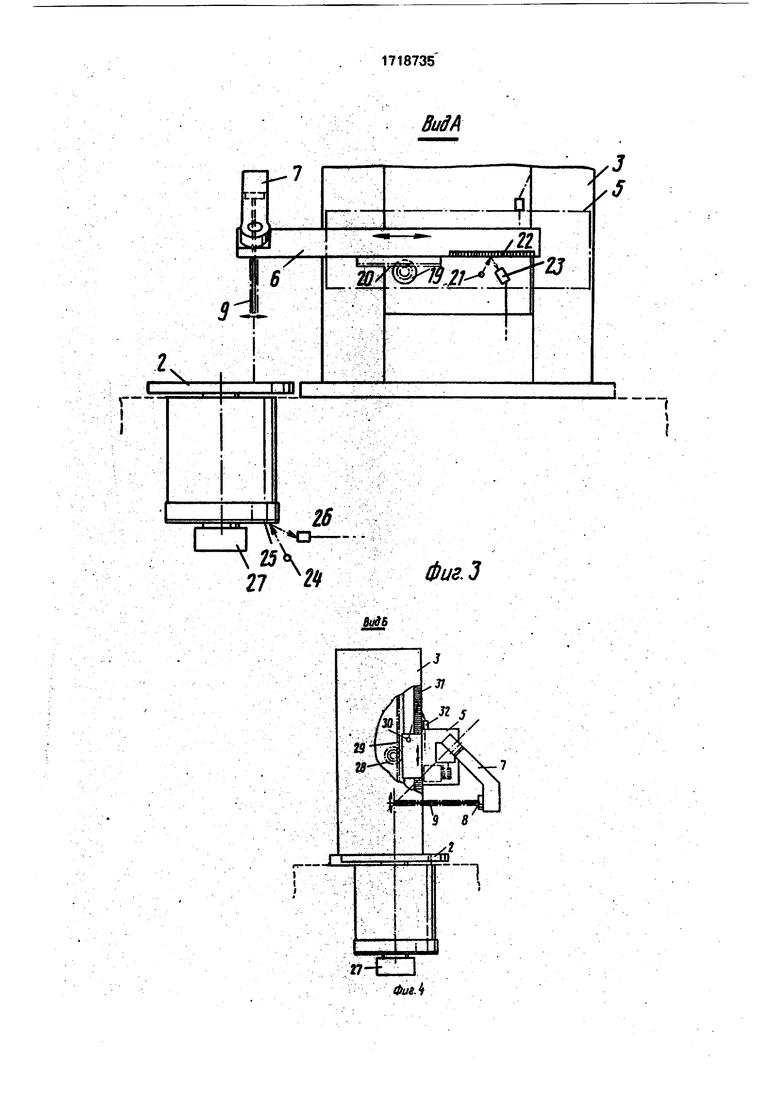
Рычаг 7 имеет возможность вращения на 180° вокруг оси 14 (фиг.2). Поворот рычага 7 осуществляется до двух крайних положений, в которых наконечник 8 занимает вертикальное или горизонтальное положение благодаря приводу, состоящему из установленных в штанге 6 электродвигателя 15 и кинематической передачи 16, а также установленных а рычаге 7 электродвигателя 17 и кинематической передачи 18. Электродвигатель 17 позволяет установить требуемую плоскость измерения датчика 8. Для обеспечения перемещения штанги 6 в каретке 5 установлен привод, состоящий из электродвигателя 19 и реечной передачи 20 (фиг.З). Контроль положения и скорости перемещения штанги 6 осуществляется с помощью оптоэлектронной системы, включающей в себя источник 21 света, линейную оптическую сетку 22 и фотоэлектрический преобразователь 23. Положение и скорость вращения стола 2 определяются с помощью другой измерительной системы, которая состоит из источника 24 света, кольцевой оптической сетки 25 и фотоэлектрического преобразователя 26. Вращение стола 2 осуществляется двигателем 27.
На кзретке 5 также установлен двигатель 28, предназначенный для обеспечения ее вертикального перемещения по колонне 3 (фиг.4). Привод вертикального перемещения каретки 5 также содержит реечную передачу 29 и механизм компенсации веса каретки 5 (не показан). Перемещение и скорость каретки 5 определяются с помощью источника 30 света, линейной оптической сетки 31 и фотоэлектрического преобразователя 32.
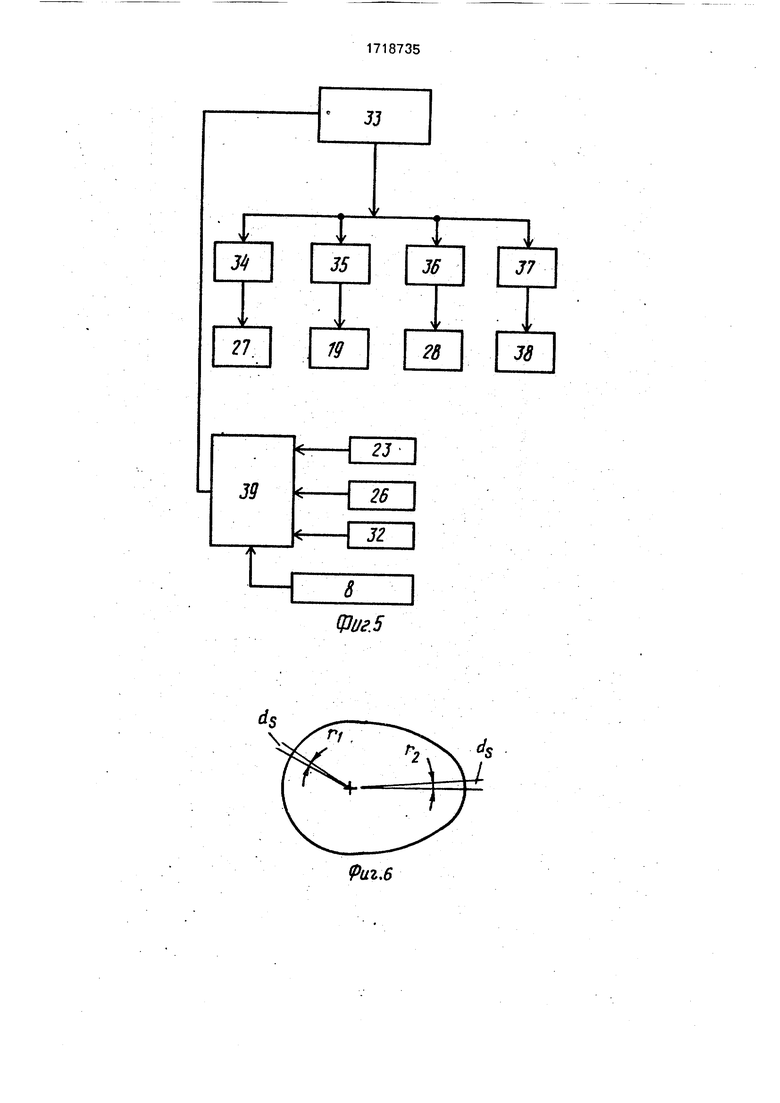
Система управления приводами содержит центральный процессор 3 и вспомогательные микропроцессоры 34-37 (фиг.5). Микропроцессоры 34-36 предназначены для управления скоростями движения стола 2, штанги 6 и каретки 5 соответственно через их двигатели 27, 19 и 28. Микропроцессор 37 служит для управления приводами 38 центрирования и нивелирования стола 2 (не показаны). С центральным процессором 33
связан интерполятор 39, соединенный с датчиком 8 и фотоэлектрическими преобра зователями 23, 26 и 32. Интерполятор 39 предназначен для образования данных о точном положении стола 2, штанги 6 и ка- ретки 5 относительно разрешающей способности небольшой части шага оптических секторов 22,25 и 31. При этом интерполятор 39 обеспечивает разрешающую способность положения штанги 6 около 500 нм и поворота стола 2 около 3 секунд. Датчик 8 имеет разрешающую способность 12 нм.
Контрольно-измерительное устройство работает следующим образом.
На стол 2 устройства устанавливается контролируемая деталь. Рычаг 7 и датчик 8 приводятся в требуемое положение. Нако нечник 9 подводится к поверхности детали. Включив привод вращения стола 2, с помощью измерительно-вычислительного блока выполняют центрирование и нивелирование рабочей поверхности стола 2, ..
, Повышение точности измерений достигается следующим образом. При превыше нии диапазона измерения датчика 8 сигнал с него поступает в основной процессор 33, который подает команду вспомогательному микропроцессору 35 для включения двигателя 19 перемещения штанги 6. Датчик 8 будет перемещаться в радиальном относи- тельно стола 2 направлении до тех пор, пока выходной сигнал с него не вернется на заданную величину. Аналогичным образом строится работа устройства при необходимости измерений, когда наконечник 8 имеет вертикальную плоскость измерений. Управление двигателем 27 осуществляется под управлением сигналов от датчика 8 таким образом, чтобы его сигнал не превышал заданный порог. В этом случае наконечник 9 следует по поверхности детали при ее вращении, при этом поверхность детали может быть достаточно сложной.
Устройство позволяет производить измерения при изменении скорости вращения детали или перемещения каретки или штанги. В ряде случаев требуется, чтобы данные контролировались в фиксированных точках на поверхности детали. Для этого основной процессор 33 считывает позиционные дан- ные интерполятора 39 и изменяет скорости соответствующих двигателей в соответствии с этими данными и программным обеспечением измерительно-вычислительного блока. Например, при измерении кулачка требуется обеспечить сбор информации че- рез равные промежутки dS (фиг.6). Для этого измерительно-вычислительный блок и средство управления приводами соответствующим образом меняют скорость вращения детали и перемещения штанги б, так как углы п и пг, охватывающие участки dS, не равны между собой. Скорость вращения поворотного стола может управляться в соответствии со следующим уравнением:
1
dt
R M/a-AdS
+
dR 2
dt
к ; TV
где V - требуемая постоянная скорость пересечения наконечником 9 поверхности детали; S - сигнал от линейного преобразователя датчика 8; R - сигнал, преобразованный интерполятором 39 из сигнала преобразователя 23 штанги 6.
Измерение плоскости целесообразно осуществлять по спиральной траектории 40 (фиг.7). Радиальное перемещение наконечника 9 может начинаться как изнутри спирали, так и снаружи и выполняется при вращении стола. Для обеспечения постоянной скорости пересечения датчиком 8 поверхности детали стол 2 вращается с переменной скоростью. Возможны другие режимы измерений, например, с постоянной скоростью вращения.
Цилиндрические и конические поверхности деталей можно измерять по спиральным траекториям 41 и 42 соответственно (фиг.8 и 9). В первом случае включаются приводы стола 2 и каретки 5, во втором случае одновременно работают приводы стола 2, штанги 6 и каретки 5.
Контрольно-измерительное устройство позволяет измерять шероховатость поверхности, круглость, прямолинейность, плоскостность, перпендикулярность, конусность, соосность и параллельность поверхностей, а также абсолютные размеры как правильных геометрических форм, так и фасонных поверхностей с высокой точностью. :
Формула изобретения
1. Контрольно-измерительное устройство, содержащее .основание, размещенную на нем с возможностью вращения вокруг своей оси опору для детали, привод для вращения опоры, датчик с наконечником для измерения поверхности детали, установленную на основании колонну, размещенную на колонне с возможностью продольного перемещения и фиксации каретку, установленную на каретке с возможностью продольного перемещения и фиксации штангу, несущую датчик, приводы для перемещения соответственно каретки и штанги, связанный с датчиком измерительно-вычислительный блок и средство управления приводами, отличающееся тем, что, с целью повышения точности и информативности измерений, оно снабжено средствами контроля положения каретки, штанги и опоры, связанными с измерительно-вычислительным блоком, который соединен со средством управления приводами, при этом измерительно-вычислительный блок и средство управления приводами предназначены для обеспечения постоянной скорости пересечения наконечником датчика поверхности детали.
2. Устройство по п. 1, о т л и ч а ю щ ё е- с я тем, что датчик с наконечником установлен с возможностью вращения вокруг своей продольной оси и фиксации.

Изобретение относится к измерительной технике и может быть использовано для контроля размеров, шероховатости, отклонений расположения и формы поверхностей деталей в автоматическом режиме. Цель изобретения - повышение точности и информативности измерений. Несущая система устройства содержит поворотный стол, колонну, каретку, штангу, перемещающуюся горизонтально в каретке, и рычаг с соответствующими приводами. Измерительная система включает в себя датчик с наконечником для контроля детали, системы измерения положения и скорости вращения стола и перемещения штанги и каретки и измерительно-вычислительный блок, который связан со средством управления приводами. Датчик может вращаться вокруг своей продольной оси, а устройство позволяет обеспечивать постоянную скорость пересечения наконечником поверхности детали. 1 з.п. ф-лы, 9 ил. сл
Ю
О
Фиг. 2
tt
27 Л
27
Фиг.З
-ЕГП
34
35
21
19
Фиг.5
36
В
Риг.6
Фи.г.7
Фиг.8
Редактор О.Хрипта
Техред М.Моргентал
Заказ 893ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Жг35. Раушская наб., 4/5
to
Корректор С.Черни
| Автоматическое измерительное устройство для контроля профилей изделий | 1974 |
|
SU528442A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект фирмы Perthen-Mahr | |||
| ФРГ, 1981, Formtester MFU 7, с.18-21 | |||
