Изобретение относится к измерительной технике и может быть использовано для определения взаимного углового положения двух объектов, например, в робототехнике в целях стыковки космических аппаратов.
Целью изобретения является увеличение диапазона измерения взаимного углового положения двух объектов и обеспечение возможности осуществления визуального контроля взаимного углового положения двух объектов.
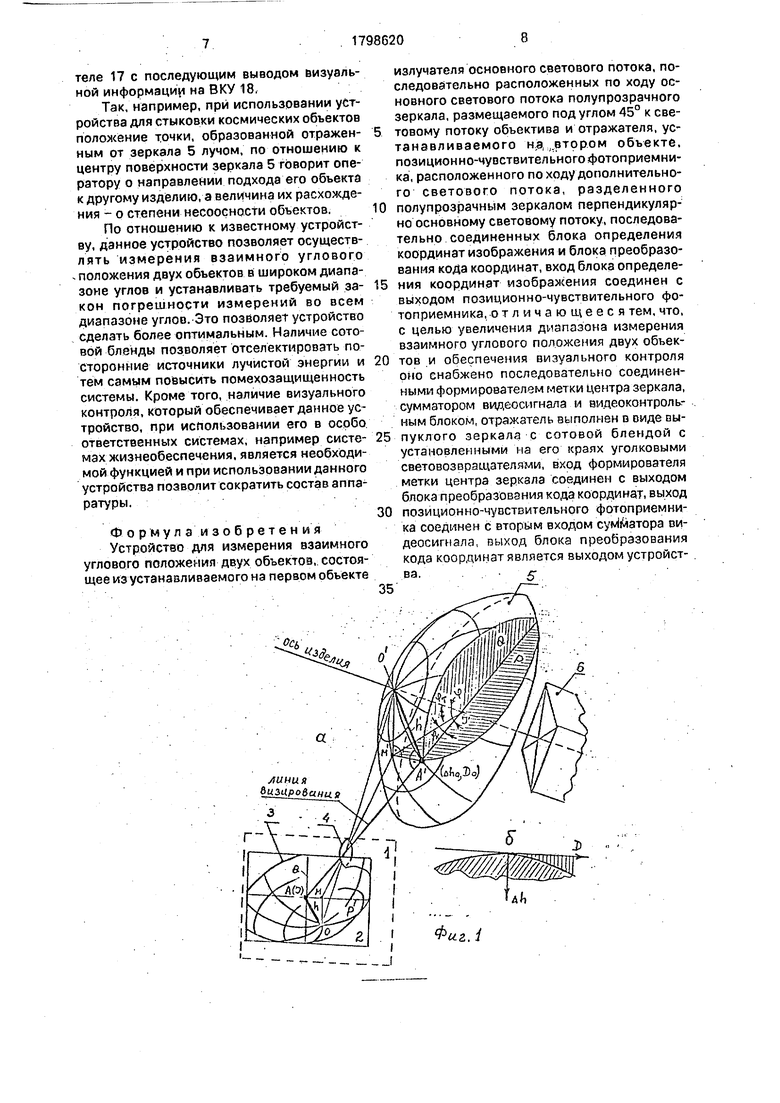
Фиг. 1, а поясняется метод измерения взаимного положения двух объектов, здесь
1 - первый объект,
2 - фоточувствительная поверхность,
3 - изображение выпуклого зеркала на фоточувствительной поверхности,
4 -объектив,
5 - выпуклое зеркало,
6 - второй объект.
На фиг. 1, б показано сечение выпуклого зеркала.
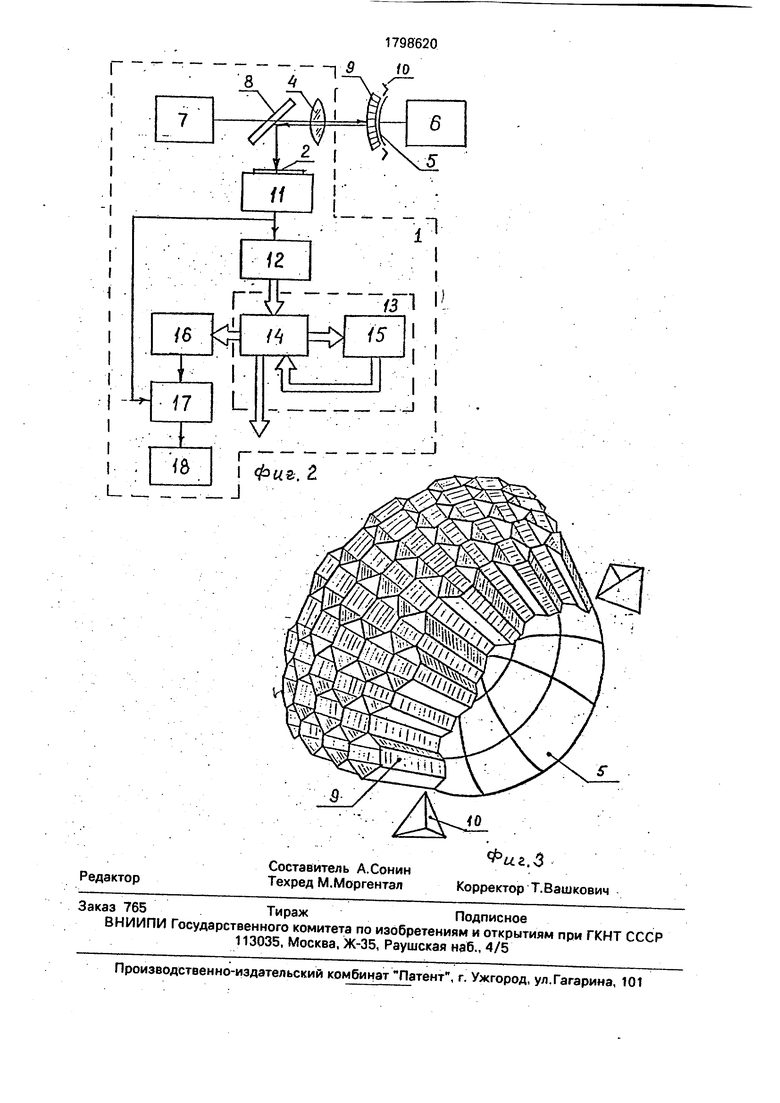
На фиг. 2 изображена блок-схема устройства для измерения взаимного положения двух объектов, содержащая
7 - излучатель,
8 - полупрозрачное зеркало,
9 - сотовая бленда, Ю - возвращателй лучистой энергии, 11- позиционно-чувствительный фото- приемник.
VI
0 00
(X N О
12 - блок определения координат изображения,
13-микроЭВМ,
14 - вычислительное устройство,
15 - постоянное запоминающее устройство (ПЗУ),
16 - формирователь метки центра зеркала,
17 - сумматор видеосигнала,
1.8 - видеоконтрольное устройство
(ВКУ).
На фиг. 3 изображена конструкция выпуклого зеркала с сотовой блендой.
Измерение взаимного углового положения двух объектов связано с использованием в качестве отражателя выпуклого зеркала. Отражение лучистой энергии на фотоприемник будет осуществляться при условии перпендикулярности участка поверхности зеркала в точке А1 линии визирования АА1 (фиг. 1, а)..
Тогда величина угла наклона оси объекта 01У к линии визирования АА1
y arctg AhL(Pa) .
а связь между измеряемой величиной и формой образующей зеркала будет определяться следующим выражением:
. , ( Df) Д hi. (Da ) + Pa V 1 + Aha(Da)2
где )-fy2
Углы тангажа и курса объекта в системе координат наблюдателя соответственно равны:
Апа(Ра)
Vx2+y2
Условию постоянства погрешности измерений в измеряемом диапазоне углов удовлетворяет зеркало, форма поверхности которого близка к сферической. Рассмотрим этот конкретный случай.
Величина угла наклона оси объекта 6 . 01У к линии визирования АА1
(5)
х + V
сферической поверхности
Углы тангажа и курса объекта 6 в системе координат наблюдателя соответственно равны
т arctg(6)
10
р к arc tg VRZ-xZ-y2
(7)
При использовании сферического зеркала с малой кривизной поверхности расчет можно производить по упрощенным формулам
15
- х
(8)
(9)
При этом относительная погрешность 20 вычисления углов тангажа и крена будет составлять
25
(
3(R2-x2-y2)-x2
3 V. y2
а т
Л
6R2
. (Ю)
(11)
30 Устройство (см. фиг. 2) состоит из двух частей, одна из которых в виде выпуклого зеркала 5 устанавливается на объекте, угловое положение которого в системе координат наблюдателя определяется Зеркало
35 является телом вращения и ось его симметрии должна совпадать с выбранной осью объекта 1. Зеркало может быть изготовлено из двух тонких упругих листов, скрепленных друг с другом. На поверхности зеркала уста
40 новлена сотовая бленда 9, а на его краях два угловых возвращателя (см. на фиг. 3). Уголковые световозвращатели состоят из трех плоских отражающих поверхностей, перпендикулярных друг другу,.
45 Вторая часть устройства расположена на объекте, откуда ведется наблюдение, и состоит из излучателя 7, полупрозрачного зеркала 8, объектива 4, позиционно-чувст- вительного фотоприемника 11, блока опре50 деления координат изображения 12, микроЭВМ 13, состоящей из вычислительного устройства и ПЗУ 15. Во вторую часть устройства также входят формирователь 16 метки центра зеркала, сумматор видеосиг55 нала 17, ВКУ 18.
Излучатель 7, полупрозрачное зеркало 8, наклоненное под углом 45°, объектив 4 и выпуклое зеркало 5 расположены на одной оптической оси, а позиционно-чувствитель- ный фотоприемник 11 расположен параллельно оптической оси у полупрозрачного зеркала 8 со стороны объектива 4. Выход позиционно-чувствительного фотоприем- нйка 11 подключен к первому входу вычислительного устройства 14, первый выход 5 которого подключен к входу ШУ 15, выход которого подключен ко второму входу вычислительного устройства 14, второй выход которого является выходом устройства, третий, выход вычислительного устройства 14 10 подключен к входу формирователя метки центра зеркала 16, выход которого подключен к первому входу сумматора 17, второй вход которого подключен к выходу позиционно-чувствительного фотоприемника 11. Выход 15 сумматора 17 подключен к входу ВКУ 18.
Излучатель 7, который может быть выполнен на светодиоде, либо лазере, работающих в видимом либо инфракрасном диапазоне, формирует направленный пучок 20 лучистой энергии. Полупрозрачное зеркало 8 с одной стороны пропускает пучок лучистой энергии от излучателя, с другой -. направляет отраженный от выпуклого зеркала 5 пучок на позиционно-чувствительный фо- 25 топриемник 11.
Блок определения координат изображения 12 выполнен на микропроцессорном комплекте и реализует алгоритм взвешенного суммирования при определении центра тяже- 30 сти изображения точечного источника
Г 2$.
AIJ Xij
Ј § Ли
| l
.1 S A,.} -Y.j
Ё S AiJ
1 1 J 1 Л
) Г/
где X, Y - оценки координат центра тяжести изображения точечного источника излучения,
AIJ - амплитуда сигнала для отсчета с коэффициентом XIJ.YIJ,
h - число строк, m-число элементов, вдоль строки, МикроЭВМ 13 осуществляет преобразование кода координат в угловое положе- ние объекта. В качестве микроЭВМ может быть использована микроЭВМ Электрони- ка-81Б, в вычислительном устройстве 14 которой осуществляется расчет углов танга- жа и курса по формулам (3) и (4). Значения Ahi(Di), определяемые формой образую510 15
0 5
0
5
0
R
э
0 .
щей поверхности зеркала 11, защиты в ПЗУ 15 микроЭВМ 13. Координаты точечного сигнала от возвращателей лучистой энергии 10 и поверхности зеркала XiYi, X2Y2, ХзУз поступают на вход микроЭВМ.
Формирователь метки центра поверхности зеркала 14 содержит два преобразователя кода во временной интервал. Каждый представляет собой реверсивный счетчик, на входы параллельной загрузки которого поступает код координаты с микроЭВМ. Для преобразователя, формирующего координату Y, тактовыми импульсами являются строчные синхроимпульсы, а сброс загрузки осуществляется кадровым синхроимпульсом. Для преобразователя, формирующего координату X - импульсы опорной частоты устройства и строчные синхроимпульсы соответственно. Импульсы переноса с обоих счетчиков поступают на схему 2И, на выходе которой и формируется импульс видеосигнала метки,
Предлагаемое устройство работает следующим образом. Пучок лучистой энергии из излучателя 7, пройдя через полупрозрачное зеркало 8 и объектив 4, отражается от поверхности выпуклого зеркала 5 и возвращателей лучистой энергии 10, причем в площадь входного зрачка объектива 4 возвращаются лучи от возвращателей 10 и участка поверхности выпуклого зеркала 5, который перпендикулярен к падающему лучу. Возвращенные лучи отражаются от поверхности полупрозрачного зеркала на фоточувствитёльную поверхность фотоприемника 11 в виде трех ярких точек, координаты которых вычисляются в блоке определения координат изображения 12.
В микроЭВМ производится идентификация сигналов. Две точки, находящиеся на наибольшем расстоянии, формируются воз- вращателями лучистой энергии, а третья точка - поверхностью выпуклого зеркала. По координатам точек от возвращателей лучистой энергии определяется центр поверхности зеркала. Далее осуществляется преобразование кода координат центра зеркала и точки, образованной лучом, возвращенным от поверхности зеркала 5, в угловое положение объекта 1.
Для осуществления визуального контроля углов взаимного положения объектов производится искусственное формирование метки центра поверхности зеркала 5, отличающееся по своему изображению от других точек, замешивание видеосигнала этой метки с видеосигналом от позиционно- чувствительного фотоприемника 11 в смесителе 17 с последующим выводом визуальной информации на ВКУ 18.
Так, например, при использовании устройства для стыковки космических объектов положение точки, образованной отраженным от зеркала 5 лучом, по отношению к центру поверхности зеркала 5 говорит оператору о направлении подхода его объекта к другому изделию, а величина их расхождения - о степени несоосности объектов.
По отношению к известному устройству, данное устройство позволяет осуществ- лять измерения взаимного углового - положения двух объектов в широком диапазоне углов и устанавливать требуемый закон погрешности измерений во всем диапазоне углов. Это позволяет устройство сделать более оптимальным. Наличие сотовой бленды позволяет отселёктировать посторонние источники лучистой энергии и тем самым повысить помехозащищенность системы. Кроме того, наличие визуального контроля, который обеспечивает данное устройство, при использовании его в особо ответственных системах, например системах жизнеобеспечения, является необходимой функцией и при использовании данного устройства позволит сократить состав аппаратуры.
Формул а изобретени я Устройство для измерения взаимного углового положения двух объектов, состоящее из устанавливаемого на первом объекте
излучателя основного светового потока, последовательно расположенных по ходу основного светового потока полупрозрачного зеркала, размещаемого под углом 45° к световому потоку объектива и отражателя, устанавливаемого на,втором объекте, позиционно-чувствительного фотоприемника, расположенного по ходу дополнительного светового потока, разделенного
полупрозрачным зеркалом перпендикулярно основному световому потоку, последовательно соединенных блока определения координат изображения и блока преобразования кода координат, вход блока определения координат изображения соединен с выходом позиционно-чувствительного фотоприемника, отличающееся тем, что, с целью увеличения диапазона измерения взаимного углового положения двух объектов и обеспечения визуального контроля оно снабжено последовательно соединенными формирователем метки центра зеркала, сумматором видеосигнала и вмцеоконтролы ным блоком, отражатель выполнен в виде пыпуклого зеркала с сотовой блендой с установленными на его краях уголковыми световозвращателями, вход формирователя метки центра зеркала соединен с выходом блока преобразования кода координат, выход
позиционно-чувствительного фотоприемника соединен с вторым входом сум матора видеосигнала, выход блока преобразования кода координат является выходом устройства.. . 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения взаимного углового перемещения двух объектов | 1984 |
|
SU1270564A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| ЛАЗЕРНЫЙ АВТОКОЛЛИМАЦИОННЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2002 |
|
RU2224243C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| Устройство для дешифрирования аэроизображений с определением координат объектов | 1974 |
|
SU505879A1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1988 |
|
SU1841031A1 |
Изобретение относится к измерительной технике и может быть использовано для определения взаимного углового положения двух объектов, например, в целях стыковки космических аппаратов. Целью изобретения является увеличение диапазона измерения взаимного углового положения двух объектов и обеспечение визуального контроля их взаимного углового положения. Для этого на выпуклое зеркало 5, установленное на объекте 6, излучателем 7, установленным на объекте 1, через полупрозрачное зеркало 8 и объектив 4 направляется лучистая энергия. Отраженный от зеркала 5 луч образует йа фоточувствительной поверхности 2 фотоприемника 11 изображение, координаты Которого измеряются в устройстве 12 и сравниваются с координатами изображения центра выпуклого зеркала 5 в вычис- лительном устройстве 14. Последнее вырабатывает коды углов тангажа и курса. Зеркало 5 снабжено сотовой блендой 9 и уголковыми отражателями 10. Контроль взаимного углового положения объектов осуществляется по видеоконтрольному устройству 18, на которой сигнал подается через формирователь изображения метки центра зеркала 16 и сумматор видеосигнала 17. Зил. . bfS Ё
| Устройство для измерения взаимного углового перемещения двух объектов | 1984 |
|
SU1270564A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
