Изобретение относится к весоизмерительной технике, в частности к большегрузным автоматическим весам с использованием упругих элементов,
Цель изобретения - повышение точности измерений, быстродействия и снижение
- энергоемкости весов.
Указанная цель достигается тем, что в устройстве для измерения веса, содержащем грузоприемную платформу, установленную на массоизмерительном преобразователе с упругим элементом и индуктивным датчиком, связанным с источником возбуждения и измерительной схемой, мзссоизме- рительный преобразователь выполнен в виде полого цилиндра из немагнитного металла, внутри которого размещен индуктивный датчик, содержащий две обмотки возбуждения, расположенные на немагнит.ном неэлектропроводящем каркасе, укрепленном на дне цилиндра, и сигнальную обмотку, расположенную на немагнитном неэлектропроводящем штоке, укрепленном в крышке цилиндра, а также введены анало- ro-цифровой преобразователь, связанный с выходом измерительной схемы, цифровой индикатор, цифровой компаратор, блок коррекции мультипликативной погрешности и блок коррекции аддитивной погрешности, схема формирования сигналов управления, ключи, источники опорного напряжения и сигнала логической единицы, причем выход аналого-цифрового преобразователя подключен ко входу цифрового индикатора и цифрового компаратора, первый выход которого соединен со вторым управляющим входом схемы формирования сигналов управления и через двухпозиционный ключ - С управляющими входами блока коррекции аддитивной погрешности, причем первая
00
о
ю
оо ю
позиция ключа соединена с выходом источника логической 1, второй выход цифрового компаратора подключен к управляющему входу блока коррекции мультипликативной погрешности, вторые управляющие входы которого соединены со вторым выходом схемы формирования сигналов управления, первый выход которой через электронный ключ соединен регулятором величины тока в одной из обмоток возбуждения, выходы блоков коррекции мультипликативной и аддитивной погрешности подключены к источнику опорного напряжения +UV-U, выход блока коррекции мультипликативной погрешности соединен с опорным выходом +Uon аналого-цифрового преобразователя, а выход блока коррекции аддитивной погрешности соединен со входами -Don и -Unp аналого-цифрового преобразователя, второй управляющий вход блока коррекции погрешности соединен со знаковым выходом аналого-цифрового преобразователя.
Блок коррекции мультипликативной погрешности содержит аналоговый коммутатор, интегрирующую R-C-цепь и схему выборки-хранения, причем первый управляющий вход аналогового коммутатора соединен со вторым выходом цифрового компаратора, вторые управляющие выходы аналогового коммутатора и управляющий вход схемы выборки-хранения соединены со вторым выходом .схемы формирования сигналов управления, источник опорного напряжения +U, -U подключен к аналоговым входам коммутатора, а выходом блока является выход схемы выборки- хранения.
Блок коррекции аддитивной погрешности содержит подключенный к источнику +U, -1Г аналоговый коммутатор, интегрирующую R-C-цепь и схему выборки-хранения, причем параллельно сопротивлению R включен одногтозиционный ключ; ауправля- ющие входы аналогового коммутатора и схемы выборки-хранения через двухпози- ционный ключ соединены с первым выходом цифрового компаратора, причем второй управляющий выход аналогового коммутатора соединен со знаковым выходом аналого-цифрового преобразователя.
Блок возбуждения содержит генератор синусоидального напряжения, два операционных усилителя с обратной связью по току возбуждения и два регулятора величины тока возбуждения обмоток, причем выход генератора синусоидального напряжения через соответствующий операционный усилитель соединен с обмотками возбуждения, включенными встречно, регуляторы тока
возбуждения включены между входом обратной связи операционного усилителя и обмоткой возбуждения, а измерительная схема содержит конденсатор, включенный
параллельно сигнальной обмотке, усилитель переменного тока и амплитудный детектор.
Выход генератора синусоидального напряжения подключен также к первому входу
схемы формирования сигналов управления.
Отличительными признаками являются
указанное выполнение массоизмерительного преобразователя, индуктивного датчика,
введение блоков коррекции аддитивной и
5 мультипликативной погрешностей и их вы- .полнениё, введение аналого-цифрового преобразователя и цифрового компаратора при указанных взаимосвязях с упомянутыми блоками, а также введение схемы форми0 рования сигнала управления и ключей, выполнение блока возбуждения.
Сущность изобретения заключается в том, что упругим элементом является металлический цилиндр, деформации длины кото5 рого под воздействием веса измеряемого груза изменяют расположение обмотв возбуждения и сигнальной обмотки относительно друг друга, и сигнал, пропорциональный усилию взвешивания, поступает на
0 первый вход аналого-цифрового преобразователя Unp, на который также поступает опорное напряжение с выхода блока коррекции аддитивной погрешности, а на второй вход аналого-цифрового преобразо5 вателя поступает указанное опорное напряжение и опорное напряжение с блока коррекции мультипликативной погрешности, уровень которого определяет коэффициент аналого-цифрового преобразователя, и оп0 ределяется в процессе корректировки погрешности непосредственно по показаниям цифрового индикатора, а также напряжения .с выхода блока коррекции. В процессе поиска не выявлено выпол5 нение упругого элемента в виде цилиндра , из немагнитного металла и расположение указанным образом трех обмоток индуктивного датчика.
Отсутствие пружинных соединений спо0 собствует повышению точности измерения, отсутствует колебательный процесс, вносящий погрешности в результат измерения и снижающий быстродействие устройства. Большая жесткость упругого элемента5 цилиндра позволяет принципиально не учй- тывать колебательные процессы при взвешивании, что способствует повышению быстродействия и точности взвешивания, отсутствие образцового груза способствует малому энергопотреблению весов в процесе коррекции мультипликативной погрешности.
Также не выявлены устройства со схемами коррекции указанных погрешностей при указанных взаимосвязях с цифровым компаратором и с аналого-цифровым преобразователем, обеспечивающие повышение точности измерения, высокое быстродействие и малую энергоемкость.
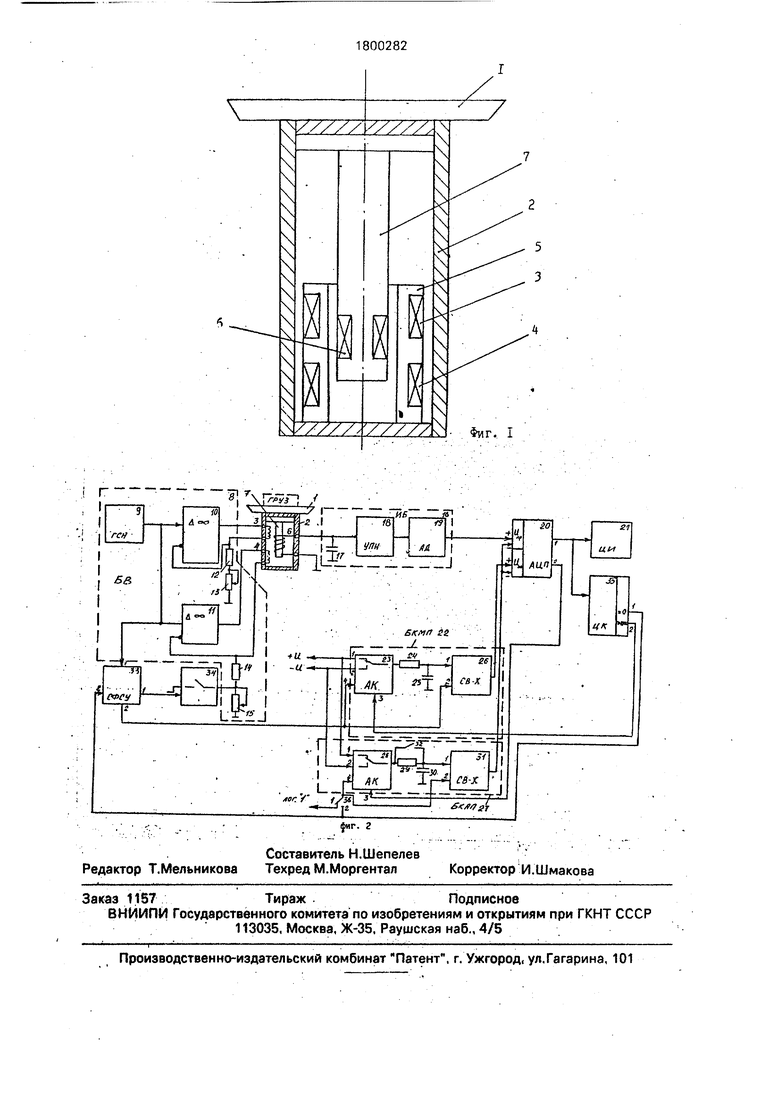
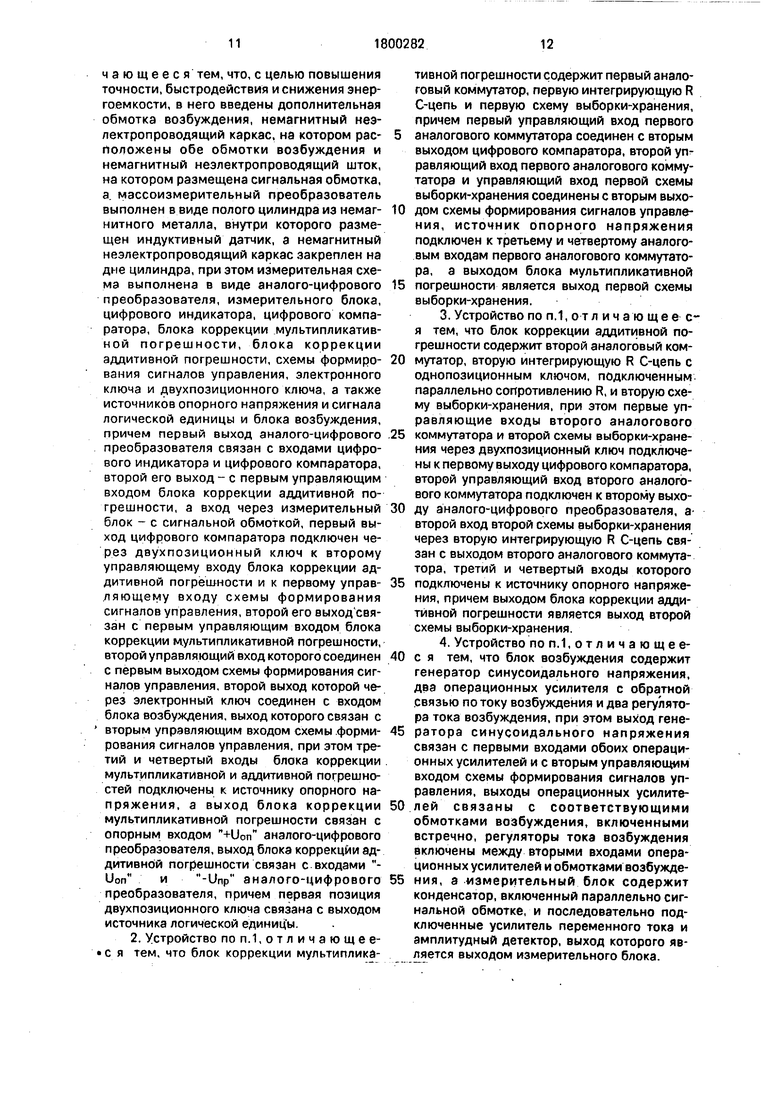
Сущность изобретения поясняется чертежам, где на фиг.1 изображен массоизме- рительный преобразовтель; на фиг.2 - схема устройства для измерения веса.
Устройство для измерения веса содержит грузоприемную платформу 1, установленную на массоизмерительном преобразователе, содержащем полый цилиндр 2 из немагнитного металла, например титана, бронзы или алюминия, предназначенный для преобразования усилий сжатия (растяжения) в промежуточную величину - осевую деформацию. Внутри цилиндра 2 расположен индуктивный датчик для преобразования линейных деформаций цилиндра 2 в электрический сигнал. Датчик содержит неподвижные относительно друг друга обмотки возбуждения 3 и 4, укрепленные в дне цилиндра 2 и намотанные встречно на немагнитном неэлектропроводящем каркасе 5, а также сигнальную обмотку б, размещен- ную на неэлектропроводящем немагнитном штоке 7, укрепленном в крышке цилиндра 2 и входящем в центральный зазор каркаса 5 с обмотками возбуждения 3 и 4. Каркас 5 и шток 7 могут быть выполнены, например, из эбонита. Толщина стенок и высота цилиндра 2 выбираются из условия его упругой деформации при максимальных прикладываемых к нему усилия. Необходимо учитывать, что величина минимальных регулируемых деформаций цилиндра 2 индуктивным преобразователем, состоящим из элементов 3-7, не более 0,0001 мкм. Платформа 1 и дно цилиндра 2 могут быть выпол- нены в виде пробок, ввинчиваемых в цилиндр 2.
К обмоткам 3 и 4 индуктивного датчика подключен блок возбуждения 8, содержащий генератор синусоидального напряжения 9, операционные усилители 10 и 11 с обратной связью по току возбуждения и регуляторы тока в обмотках возбуждения 3 и 4, выполненные в виде постоянного сопротивления 12 и подстроечного 13 для обмотки 3 и в виде постоянного сопротивления 14 и подстроечного 15 для обмотки 4,
Регуляторы тока включены между входом обратной связи соответствующего опе- рационного усилителя и выводом сортветствующей обмотки возбуждения.
Измерительный блок 16 содержит конденсатор 17, образующий с сигнальной обмоткой 6 колебательный контур, настроенный на частоту генератора синусо- 5 идального напряжения 18 и амплитудный детектор 19. Выход амплитудного детектора 19 через аналого-цифровой преобразователь (АЦП) 20 соединен с цифровым индикатором 21.
0 Блок коррекции мультипликативной погрешности БКМП 22 содержит аналоговый коммутатор 23, интегрирующую R-C-цепь на элементах 24, 25, схему выборки-хранения 26. Блок коррекции аддитивной погрешно5 сти БКАП 27 содержит аналоговый коммутатор 28, интегрирующую R-C-цепь на элементах 29-30, схему выборки-хранения 31, ключ 32. Сопротивление 29 шунтировано ключом 32 для изменения постоянной вре0 мени интегрирования R-C-цепи. Весы также содержат схему формирования сигналов управления 33, электронный ключ 34 для шунтирования переменного сопротивления 15 и изменения тока в катушке 4 и цифровой
5 компаратор 35, вход которого подключен к выходу АЦП 20, а выходы связаны с входами блоков 22, 27 коррекции аддитивной погрешности и мультипликативной погрешности и схемы 33 формирования сигналов
0 управления.
Выход генератора 9 связан с прямыми входами операционных усилителей 10, 11, к выходам которых подключены обмотки возбуждения 3, 4 соответственно. Инверсные
5 входы, усилителей 10, 11 подключены к сопротивлениям 12, 13 и 14, 15 а также ко вторым выводам обмоток 3,4 соответствен- но. Сигнальная обмотка 6 подключена к конденсатору 17 и входу усилителя 18, выход
0. которого подключен к входу амплитудного детектора 19. Сигнал с выхода детектора 19 подается на вход, предназначенный для подачи преобразуемого напряжения Unp аналого-цифрового преобразователя 20,
5 первый выход которого подключен к индикатору 21 и цифровому компаратору 35, второй выход - к аналоговому коммутатору 28 блока коррекции аддитивной погрешности 27. Первый выход компаратора 35 подклю0 чен ко второму входу схемы формирования сигналов управления 33, через двухпозици- онный ключ 36 к коммутатору 28 и схеме выборки-хранения 31, а второй выход - к аналоговому коммутатору 23. Выход комму5 татора 23 через интегрирующую цепочку 24, 25 подключен к первому выходу схемы выборки-хранения 26. Выход схемы выборки- хранения 26 подключен к входу, который предназначен для подачи опорного напря жения -HJon аналого-цифрового преобразователя 20. Выход схемы выборки-хранения 31 подключен к входам -Unp. -U0n преобразователя 20. Первый выход схемы формирования сигналов управления 33 подключен к входу управления ключа 34, выход которого подключен к сопротивлениям 14, 15, второй выход схемы 33 подключен ко входу коммутатора 23 и второму входу схемы вы- б.орки-хранения 26. .
Весы работают следующим образом.
Осевые усилия сжатия (растяжения), прикладываемые к платформе 1, передаются на упругий элемент - цилиндр 2 массоиз-. мерительного преобразователя, вызывая тем самым деформацию цилиндра в осевом направлении. Так как каркас 5 с обмотками
3. 4 прикреплен к нижней части цилиндра 2, а шток 7 с обмоткой 6 - к верхней, то осевые деформации цилиндра приводят к пропорциональному смещению сигнальной обмотки 5 относительно обмоток возбуждения 3,
4. Так как обмотки 3, 4 намотаны встречно, то созданные ими переменные, магнитные потоки взаимно вычитаются и электродвижущая сила, наведенная на обмотке 6 является функцией разности потокосцеплений обмоток 3, 4 с обмоткой б, Авторами установлено, что однозначность зависимости между осевыми усилиями и уровнем напряжения на сигнальной обмотке 6 определяется стабильностью разности потокосцеплений обмоток 3, 4 с обмоткой 6 при одном и том же уровне осевого усилия.
Синусоидальное напряжение с выхода генератора 9 подается на операционные
усилители 10, 11 и первый вход схемы формирования сигналов управления 33. Обмотки возбуждения 3, 4 подключены к усилителям 10, 11 соответственно так, что мгновенное значение сунусоидального тока, протекающего в них, определяется отношением мгновенного значения напряжения на выходе генератора 9 к суммарному значению сопротивлений 12, 11 для обмотки 3
и сопротивлений 14, 15 для обмотки 4.
Электродвижущая сила, наведенная на обмотке 6, подается на. вход усилителя 18.
. Обмотка б и конденсатор 17 образуют колебательный контур, собственная частота колебаний которого совпадает с частотой напряжения на выходе генератора 9. С выхода усилителя 18 усиленное по амплитуде напряжение подается на вход амплитудного детектора 19, с выхода которого постоянное напряжение, по величине равное амплитуде переменного напряжения на его входе, по- да ется на вход +Unp аналого-цифрового преобразователя 20. Результат измерения отображается цифровым индикатором 21, который подключен к первому выходу АЦП
20. Второй выход преобразователя 20 является знаковым и находится в состоянии лог.1, если результат преобразования больше или равен +ОООГ, и в состоянии лог.
О, если результат меньше или равен -000.
Первый выход компаратора 35 находится в состоянии лог. Г, если показания индикатора 21 равны ±000, независимо
от состояния второго выхода АЦП 20, в противном случае, когда на выходе АЦП число - в состоянии лог. О. Второй выход компаратора 35 находится в состоянии лог.1, если показания индикатора 21 больше или равны 1000, в противном случае - в состоянии лог. О. Логическая 1 с первого выхода компаратора 35 разрешает работу элементу 33, через ключ 36 переводит выход коммутатора 28 из высокоимпедднсного состояния в состояние его первого входа, если на третьем входе коммутатора 28 лог. 1, или в состояние его второго входа, если на третьем входе лог. О, а также переводит схему выборки-хранения 31 из режима хранения в режим выборки, Логическая 1 на первом выходе схемы формирования сигналов управления 33 переводит ключ 34 в замкнутое состоя ниё, тем самым шунтируя резистор 15 и изменяя уровень тока возбуждения обмотки 4. Логическая 1 со второго выхода схемы 33 переводит выход коммутатора 23 из высоко- импедансного в состояние его первого входа, если на втором выходе компаратора 35
лог. 1, или в состояние его второго входа, если на втором выходе компаратора 35 лог. О, а также переводит схему выборки-хранения 26 из режима хранения в режим выборки.
Начальная установка весов производится путем замыкания ключа 32 и перевода ключа 36 в первое положение (соединение с источником логической 1, в качестве которого используют уровень напряжения, в соответствии с принятой положительной или отрицательной логикой) до момента установления показаний индикатора 21, равных 000, что приводит к появлению лог. Т на первом выходе компаратора 35, которая
разрешает проведение автоматической коррекции аддитивной и мультипликативной погрешности. Для коррекции мультипликативной погрешности не требуется применение образцовых грузов. Корректировка
погрешности производится при отсутствии груза на платформе 1. При нагружении платформы 1 показания индикатора 21 становятся отличными от 000, что приводит к появлению уровня лог О на первом выходе компаратора 35 и прекращению коррекции погрешностей на время взвешивания.
Корректировка аддитивной погрешности проводится следующим образом. Уровень лог, 1 | на 4 входе коммутатора 28 разрешает по сигналу со знакокового выхода АЦП 20 передачу на его выход уровня напряжения с его первого входа, если U пр. положительно, или со второго входа, если Unp, отрицательно, что соответственно приводит к увеличению или уменьшению уровня напряжения на конденсаторе 30 и на выходе схемы выборки-хранения 31. Увеличение напряжения на выходе элемента 31 приводит к тому, что показания индикатора 21 начнут уменьшаться и даже приведут к смене полярности Unp. на входе преобразователя 20 и появлению на его втором выходе уровня лог, О, который переключит коммутатор 28 и уровень напряжения на конденсаторе 30 начнет постепенно снижаться, пока снова не произойдет смена полярности преобразуемого напряжения Unp. Благодаря этому показания индикатора 21 равны 000 при отсутствии взвешиваемого груза.
Коррекция мультипликативной погрешности происходит следующим образом.
При наличии на втором входе элемента 33 лог. 1 на его первом выходе с интервалом в несколько минут периодически появляется уровень лог, 1, длительностью немного большей, чем необходимо для установки показаний индикатора 21 при изменении уровня +Unp на выходе преобразователя 20, вызванное замыканием ключа 34 и изменением тока возбуждения обмотки 4,
На втором выходе схемы 33 с задержкой, необходимой для установления показаний индикатора 31, появится уровень, лог. 1, который разрешит работу коммутатору 23 и схеме 20 (по входам 4 и 2 соответственно).
Увеличение тока возбуждения в обмотке 4 приводит к изменению показаний индикатора 21. Если показания больше или равны 1000, то на втором выходе компаратора 35 появляется уровень лог. 1, в противном случае - уровень лог. О, Логическая 1 на 3 входе коммутатора 23 приводит к постепенному увеличению уровня напряжения на конденсаторе 25, которое и является опорным напряжением +Uon. для преобразователя 20, что приводит к уменьшению показаний индикатора 21, пока они не станут равны 999, после чего произойдет смена логического состояния выхода 2компаратора 35. переключение коммутатора 23 и уменьшение напряжения
на конденсаторе 25 до тех пор, пока показания индикатора 21 не станут равны 1000. Существенным является то, что для полной корректировки мультипликативной погреш- ности достаточно, чтобы изменение показания индикатора 21 происходило всегда на одну и ту же величину, уровень которой зависит от отношения величин сопротивлений 14,15, Таким образом, исключается влияние
0 многих дестабилизирующих факторов, в том числе колебаний температуры и уровня напряжения питания электронной схемы весов. За один цикл корректировки погрешностей изменение уровня напряже5 ния на выходе элементов 26, 31 происходит на величину меньшую, чем напряжение, соответствующее единице младшего разряда индикатора 21..
Авторами было изготовлено устройство
0 для измерения веса с массоизмерительным преобразователем, имеющим цилиндр из титана марки В 8 длиной 200 мм, наружным диаметром 50 мм, внутренним - 20. Катушки возбуждения имели по 350 витков, сигналь5 ная обмотка - 400 витков.
Произведенные испытания показали, что весоизмерительное устройство с таким преобразователем обеспечивает минимально регистрируемый вес - 9 г, что соответст0 вует абсолютной деформации цилиндра 10 10м.
Максимально регистрируемый вес (в пределах упругих деформаций цилиндра) составляет 50-100 т, Неупругие деформации
5 начинаются при усилиях более 100.т.
Таким образом, за счет указанного выполнения массоизмерительного преобразователя, введения блоков коррекции аддитивной и мультипликативной погреш0 ности, их выполнения и взаимосвязи с АЦП, аналоговым компаратором и схемой формирования сигналов управления, наличия регуляторов тока возбуждения в обмотках обеспечивается большая точность измере5 ния, большее быстродействие уменьшается энергоемкость. Отсутствие пружинных элементов приводит к устранению колебательного процесса, За счет отсутствия образцового груза и необходимости его
0 примагничивания уменьшается энергоемкость устройства по сравнению с прототи- - пом. -
Формула изобретения
1. Устройство для измерения веса, со5 держащее грузоприемную платформу, уста- но&ленную на массоизмерительном преобразователе с упругим элементом и ин- . дуктивный датчик с основной обмоткой воз- буждения и сигнальной .обмоткой, связанной с измерительной схемой, о т л ичающееся тем, что, с целью повышения точности, быстродействия и снижения энергоемкости, в него введены дополнительная обмотка возбуждения, немагнитный неэлектропроводящий каркас, на котором расположены обе обмотки возбуждения и немагнитный неэлектропроводящий шток, на котором размещена сигнальная обмотка, а. массоизмерительный преобразователь выполнен в виде полого цилиндра из немагнитного металла, внутри которого размещен индуктивный датчик, а немагнитный неэлектропроводящий каркас закреплен на дне цилиндра, при этом измерительная схема выполнена в виде аналого-цифрового преобразователя, измерительного блока, цифрового индикатора, цифрового компаратора, блока коррекции мультипликативной погрешности, блока коррекции аддитивной погрешности, схемы формирования сигналов управления, электронного ключа и двухпозиционного ключа, а также источников опорного напряжения и сигнала логической единицы и блока возбуждения, причем первый выход аналого-цифрового преобразователя связан с входами цифрового индикатора и цифрового компаратора, второй его выход - с первым управляющим входом блока коррекции аддитивной погрешности, а вход через измерительный блок - с сигнальной обмоткой, первый выход цифрового компаратора подключен через двухпозиционный ключ к второму управляющему входу блока коррекции аддитивной погрешности и к первому управляющему входу схемы формирования сигналов управления, второй его выход связан с первым управляющим входом блока коррекции мультипликативной погрешности, второй управляющий вход которого соединен с первым выходом схемы формирования сигналов управления, второй выход которой через электронный ключ соединен с входом блока возбуждения, выход которого связан с вторым управляющим входом схемы формирования сигналов управления, при этом третий и четвертый входы блока коррекции мультипликативной и аддитивной погрешностей подключены к источнику опорного напряжения, а выход блока коррекции мультипликативной погрешности связан с опорным входом +Uon аналого-цифрового преобразователя, выход блока коррекции аддитивной погрешности связан с входами - Поп и -Unp аналого-цифрового преобразователя, причем первая позиция двухпоэиционного ключа связана с выходом источника логической единицы.
2. Устройство поп.1,отличающее- с я тем, что блок коррекции мультипликативной погрешности содержит первый аналоговый коммутатор, первую интегрирующую R С-цепь и первую схему выборки-хранения, причем первый управляющий вход первого
аналогового коммутатора соединен с вторым выходом цифрового компаратора, второй управляющий вход первого аналогового коммутатора и управляющий вход первой схемы выборки-хранения соединены с вторым выхо0 дом схемы формирования сигналов управления, источник опорного напряжения подключен к третьему и четвертому аналоговым входам первого аналогового коммутатора, а выходом блока мультипликативной
5 погрешности является выход первой схемы выборки-хранения.
3. Устройство по п.1, от л ичающее с- я тем, что блок коррекции аддитивной погрешности содержит второй аналоговый ком0 мутатор, вторую интегрирующую R С-цепь с однопозиционным ключом, подключенным параллельно сопротивлению R, и вторую схему выборки-хранения, при этом первые управляющие входы второго аналогового
5 коммутатора и второй схемы выборки-хранения через двухпозиционный ключ подключены к первому выходу цифрового компаратора, второй управляющий вход второго аналогового коммутатора подключен к второму выхо0 ду аналого-цифрового преобразователя, а- второй вход второй схемы выборки-хранения через вторую интегрирующую R С-цепь связан с выходом второго аналогового коммутатора, третий и четвертый входы которого
5 подключены к источнику опорного напряжения, причем выходом блока коррекции аддитивной погрешности является выход второй схемы выборки-хранения.
4. Устройство поп.1,отличающее0 с я тем, что блок возбуждения содержит генератор синусоидального напряжения, два операционных усилителя с обратной связью по току возбуждения и два регулятора тока возбуждения, при этом выход гене5 ратора синусоидального напряжения связан с первыми входами обоих операционных усилителей и с вторым управляющим входом схемы формирования сигналов управления, выходы операционных усилите0 лей связаны с соответствующими обмотками возбуждения, включенными встречно, регуляторы тока возбуждения включены между вторыми входами операционных усилителей и обмотками возбужде5 ния, а измерительный блок содержит конденсатор, включенный параллельно сигнальной обмотке, и последовательно подключенные усилитель переменного тока и амплитудный детектор, выход которого является выходом измерительного блока.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 2005 |
|
RU2295706C2 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1495993A1 |
| Аналого-цифровой преобразователь с автоматической коррекцией функции преобразования | 1988 |
|
SU1667246A1 |
| Аналого-цифровой преобразователь интегральных характеристик электрических величин с мультипликативной автокоррекцией | 1984 |
|
SU1185604A1 |
| Цифровой измеритель температуры | 1988 |
|
SU1583757A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2334355C1 |
| ДАТЧИК ДАВЛЕНИЯ | 2013 |
|
RU2523754C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЭЛЕКТРОПРОВОДНЫХ ЖИДКОСТЕЙ | 2014 |
|
RU2584343C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЭЛЕКТРОПРОВОДНЫХ ЖИДКОСТЕЙ | 2014 |
|
RU2584384C2 |
| Устройство для измерения температуры | 1984 |
|
SU1268970A1 |
Использование: изобретение относится к весоизмерительной технике, в частности к большегрузным автоматическим весам и использованием упругих элементов Сущность изобретения: устройство для измерения содержит грузоприемную платформу, установленную на массоизмерительном преобразователе с упругим элементом, и индуктивный датчик с обмотками возбуждения и сигнальной обмоткой, связанной с измерительной схемой, состоящей из аналого-цифрового преобразователя, измерительного блока, цифрового индикатора, цифрового компаратора, блока коррекции мультипликативной погрешности, блока коррекции аддитивной погрешности, блока возбуждения, схемы формирования сигналов управления, электронного ключа, двух- позиционного ключа. 3 з.п,ф-лы, 2 ил.
| Электронные цифровые весы | 1981 |
|
SU966502A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения веса | 1987 |
|
SU1509606A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
