10, регулирующим приводом, а через него с НУ, Второй выход Д 2 связан последовательно с измерителем 7 и вторым входом схемы сравнения 9. Выходное звено ИУ всме- сте с вытеснителем 3 совершает возвратно- поступательное движение между двумя крайними положениями. При этом мембрана. 5, касаясь вытеснителя 3, воздействует на Д 2. Сигнал с Д 2 реализуются в измерителях б и 7 в отрезки времени, характеризующие период движения выходного звена ИУ (Тизм) и время заполнения протеза кровью в период диастолы, зависящее от величины предсердного давления (Тизм), в ФП 8 заложен временной аналог физиологической зависимости расхода от величины предсердного давления, получаемый при тарировке протеза. При поступлении в ФП
значение т.Изм преобразуется в сигнал Т (о соответствии с аналогом). Сигналы Т и Тизм сравниваются в схеме сравнения 9, и при появлении сигнала рассогласования через блок управления 10 и регулирующий привод в ИУ вносится корректировка режима работы протеза. Регулирование будет продолжаться до тех пор, пока в схеме сравнения 9 не наступит нулевое рассогласование, что будет соответствовать физиологическому режиму работы протеза. Для исключения ложных сигналов о касании вытеснителя 3 и мембраны 5 в устройство может быть введен датчик крайнего диастолического положения вытеснителя, выход которого подключен к второму входу измерителя 7. 1 з.п. ф-лы, 4 ил..
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА И СПОСОБ ЕГО РАБОТЫ | 2007 |
|
RU2360704C1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА (ВАРИАНТЫ) | 2013 |
|
RU2550047C2 |
| Устройство для управления искусственным сердцем | 1986 |
|
SU1477418A1 |
| Протез сердца | 1982 |
|
SU1077094A1 |
| Способ прямого интраоперационного измерения градиента давления между левым желудочком сердца и аортой | 2020 |
|
RU2762165C1 |
| Протез сердца с гидравлическим приводом | 1983 |
|
SU1438599A3 |
| ПРОТЕЗ КАМЕРЫ СЕРДЦА И СООТВЕТСТВУЮЩАЯ КАРДИОЛОГИЧЕСКАЯ ВСПОМОГАТЕЛЬНАЯ СИСТЕМА | 2020 |
|
RU2812171C2 |
| Пневматическая перфузионная установка | 1981 |
|
SU957913A1 |
| Стенд для испытания искусственного сердца | 1986 |
|
SU1386204A1 |
| ПЕРСОНИФИЦИРОВАННАЯ 3D МОДЕЛЬ КАРДИО-АОРТАЛЬНОГО КОМПЛЕКСА, СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ И ПРОВЕДЕНИЯ ОПЕРАЦИЙ ПРИ СТРУКТУРНЫХ ПОРАЖЕНИЯХ СЕРДЦА НА ОСНОВЕ МОДЕЛИ И СПОСОБ ИЗГОТОВЛЕНИЯ ТАКОЙ СИСТЕМЫ | 2023 |
|
RU2825771C1 |
Использование: в медицинской технике, может быть применено при создании устройств для полного замещения естественного сердца искусственным и позволяет повысить точность и надежность этих устройств. Сущность изобретения: устройство состоит из протеза сердца с мембраной 5, исполнительного устройства (ИУ) с линиями подвода и отвода приводной среды, датчика (Д) 2 положения мембраны, закрепленного на вытеснителе 3, измерителей 6 и 7. функционального преобразователя (ФП) 8. схемы сравнения 9, блока управления 10, регулирующего привода. Д 2 связан одним выходом последовательно с измерителем 6, ФП схемой сравнения 9, блоком управления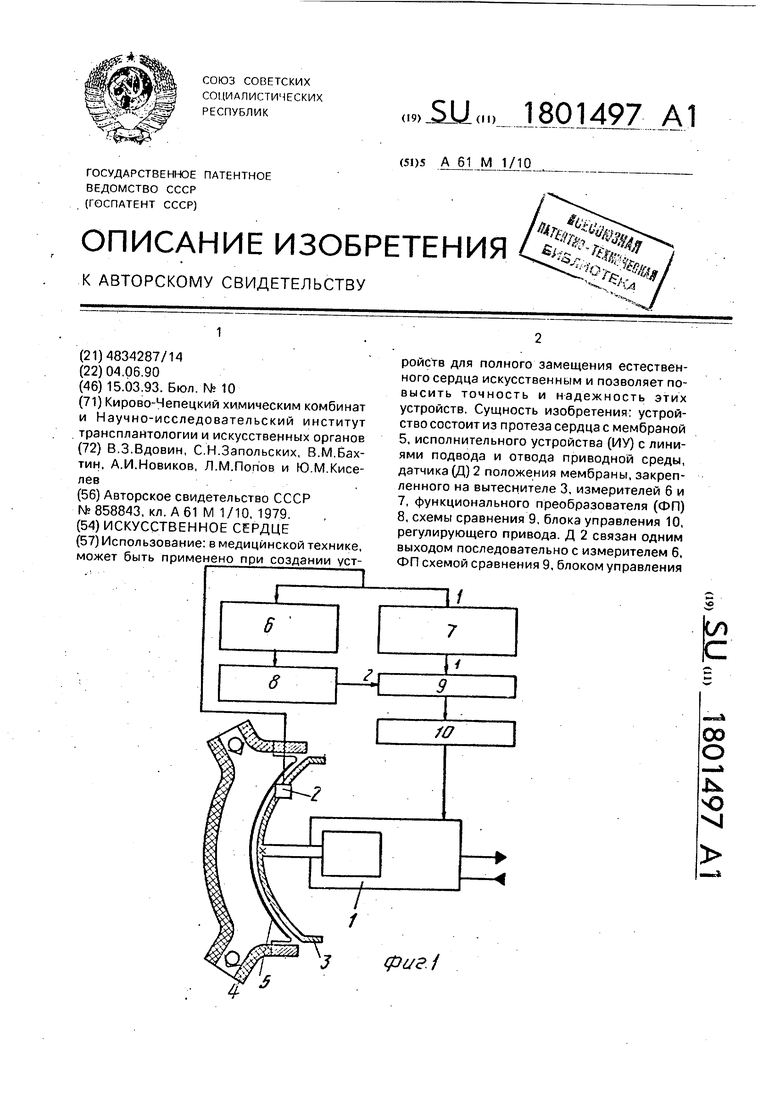
Изобретение относится к медицинской технике и может быть использовано при полном замещении естественного сердца искусственным.
Цель изобретения - повышение надежности и физиологичности работы искусственного сердца.
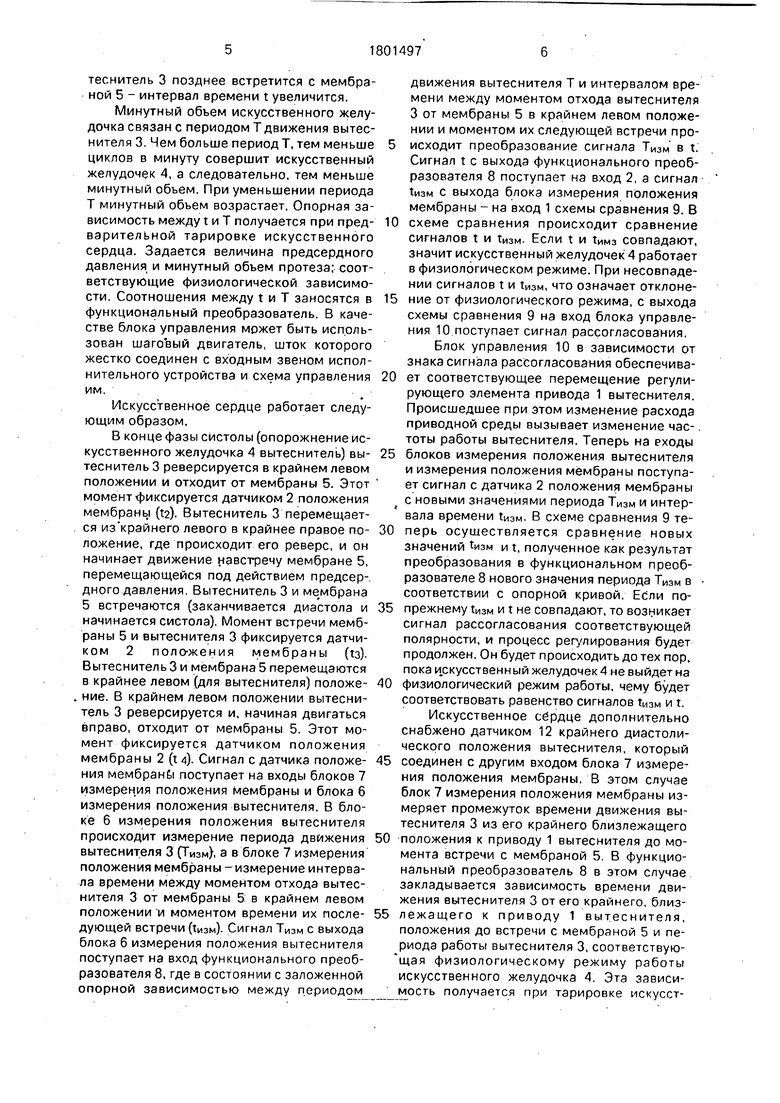
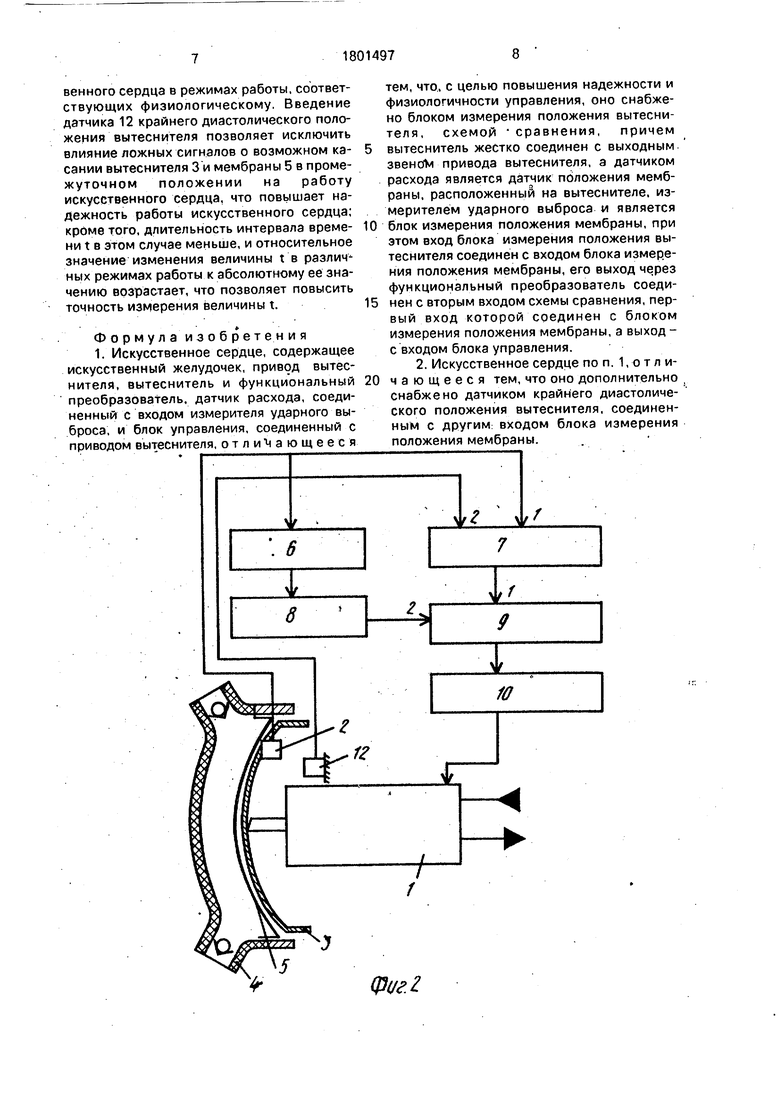
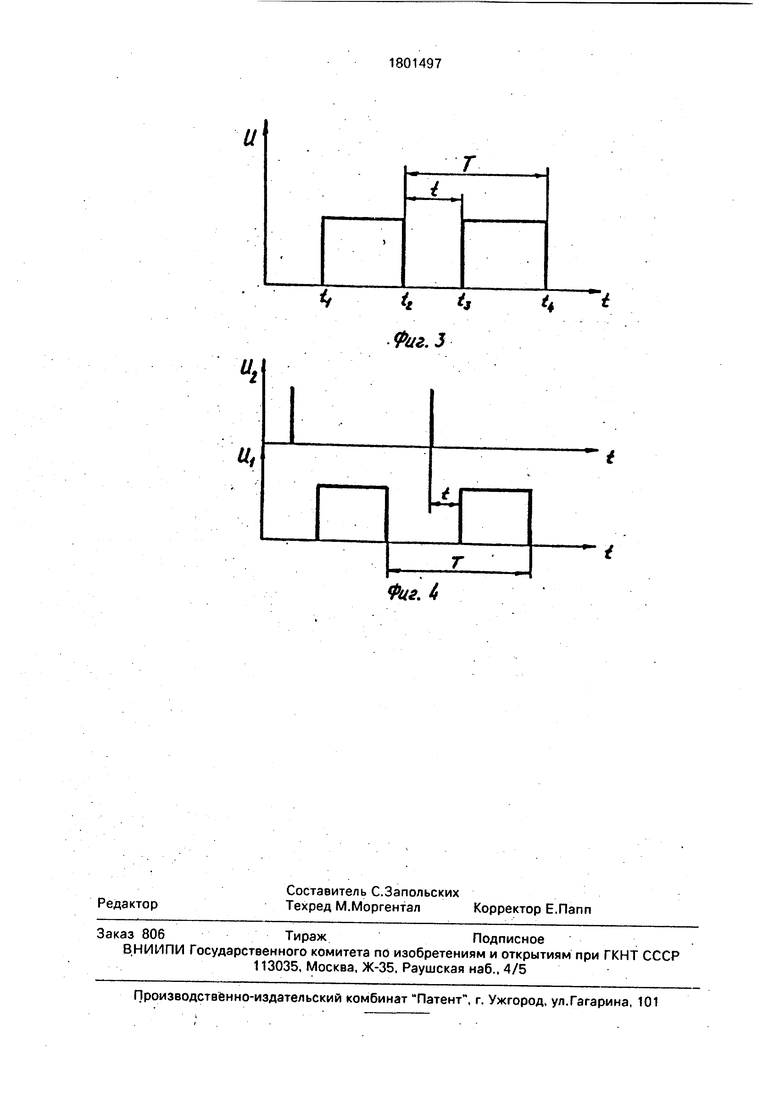
На фиг, 1 изображена структурная схема одного из вариантов искусственного сердца; на фиг, 2 - структурная схема другого усовершенствованного варианта; на фиг. 3 - форма сигнала с контактного датчика положения мембраны для первого варианта устройства; на фиг. 4 - форма сигналов с двух контактных датчиков для второго варианта.
Искусственное сердце содержит привод Т вытеснения, датчик 2 положения мембраны, установленный на вытеснителе 3, жестко связанном с выходным звеном привода 1 вытеснителя, искусственный желудочек 4 с мембраной 5, не связанной с вытеснителем 3, блок б измерения положения вытеснителя, блок 7 измерения положе- ния мембраны, функциональный преобразователь 8. схему сравнения 9, блок управления 10, при этом датчик 2 положения мембраны соединен с входом блока 7 измерения положения мембраны, вход блока 6 измерения положения вытеснителя со- единен с входом блока 7 измерения положения мембраны, его выход через функциональный преобразователь 8 соединен с вторым входом схемы сравнения 9, первый вход которой соединен с блоком 7 измерения положения мембраны, а выход - с входом блока управления 10, выход которого соединен с входом привода 1 вытеснителя. В качестве исполнительного устройства может быть использовано известное устройство. Датчиком 2 положения мембраны может быть контактный датчик с нормально открытыми контактами, которые замыкаются при касании вытеснителя 3 с мембраной 5 и размыкаются при отходе вытеснителя от мембраны. Роль измерителей могут выполнять частотомеры - хронометры типа Ф-5080 или им подобные.
Функциональный преобразователь 8 представляет собой устройство, позволяющее задать опорную зависимость между интервалом времени движения вытеснителя 3 из крайнего левого положения до встречи с мембраной 5 после реверса вы- теснителя в его крайнем правом положении и периодом движения Т вытеснителя 3,- которая отражает физиологическую зависимость предсердного давления и минутного объема сердца. Предсердное давление связано с интервалом времени
между моментом отхода вытеснителя 3 от мембраны 5 и моментом встречи мембраны 5 с вытеснителем 3, после его реверса в крайнем правом положении. Например, если предсердное давление возросло, то
скорость наполнения искусственного желудочка 4 возрастает и вытеснитель 3 раньше встретится с мембраной 5. При этом интервал времени уменьшится и, наоборот, если предсердное давление
уменьшится, уменьшится и скорость наполнения искусственного желудочка; вытеснитель 3 позднее встретится с мембраной 5 - интервал времени t увеличится.
Минутный обьем искусственного желудочка связан с периодом Т движения вытес- нителя 3. Чем больше период Т, тем меньше циклов в минуту совершит искусственный желудочек 4, а следовательно, тем меньше минутный обьем. При уменьшении периода Т минутный объем возрастает. Опорная зависимость между t и Т получается при предварительной тарировке искусственного сердца. Задается величина предсердного давления и минутный обьем протеза; соответствующие физиологической зависимости. Соотношения между t и Т заносятся в функциональный преобразователь. В качестве блока управления может быть использован шаговый двигатель, шток которого жестко соединен с входным звеном исполнительного устройства и схема управления им. . „
Искусственное сердце работает следующим образом.
В конце фазы систолы (опорожнение искусственного желудочка 4 вытеснитель) вы- теснитель 3 реверсируется в крайнем левом положении и отходит от мембраны 5. Этот момент фиксируется датчиком 2 положения мембраны (t2). Вытеснитель 3 перемещается из крайнего левого в крайнее правое поожение, где происходит его реверс, и он начинает движение навстречу мембране 5, перемещающейся под действием предсер-. ного давления. Вытеснитель 3 и мембрана 5 встречаются (заканчивается диастола и начинается систола). Момент встречи мембраны 5 и вытеснителя 3 фиксируется датчиком 2 поло-жения мембраны (тз). Вытеснитель 3 и мембрана 5 перемещаются в крайнее левом (для вытеснителя) положе- ние. В крайнем левом положении вытеснитель 3 реверсируется и, начиная двигаться вправо, отходит от мембраны 5. Этот момент фиксируется датчиком положения мембраны 2 (t/t). Сигнал с датчика положения мембранЁ.1 поступает на входы блоков 7 измерения положения мембраны и блока б измерения положения вытеснителя. В блоке 6 измерения положения вытеснителя происходит измерение периода движения вытеснителя 3 (Тизм}, а в блоке 7 измерения положения мембраны - измерение интервала времени между моментом отхода вытеснителя 3 от мембраны 5: в крайнем левом положении и моментом времени их последующей встречи (Хизм). Сигнал ТИЗм с выхода блока 6 измерения положения вытеснителя поступает на вход функционального преобразователя 8, где в состоянии с заложенной опорной зависимостью между периодом
движения вытеснителя Т и интервалом времени между моментом отхода вытеснителя 3 от мембраны 5 в крайнем левом положении и моментом их следующей встречи про- 5 исходит преобразование сигнала Тизм в t. Сигнал t с выхода функционального преобразователя 8 поступает на вход 2, а сигнал т.изм с выхода блока измерения положения мембраны - на вход 1 схемы сравнения 9. В
0 схеме сравнения происходит сравнение сигналов t и Гизм. Если t и т.Имз совпадают, значит искусственный желудочек 4 работает в физиологическом режиме. При несовпадении сигналов t и t-изм, что означает отклоне5 ние от физиологического режима, с выхода схемы сравнения 9 на вход блока управления 10 поступает сигнал рассогласования.
Блок управления 10 в зависимости от знака сигнала рассогласования обеспечива0 ет соответствующее перемещение регулирующего элемента привода 1 вытеснителя. Происшедшее при этом изменение расхода приводной среды вызывает изменение час-. тоты работы вытеснителя. Теперь на еходы
5 блоков измерения положения вытеснителя и измерения положения мембраны поступает сигнал с датчика 2 положения мембраны с новыми значениями периода Тизм и интервала времени 1изм. В схеме сравнения 9 те0 перь осуществляется сравнение новых значений изм и t, полученное как результат преобразования в функциональном преобразователе 8 нового значения периода ТМЗм в соответствии с опорной кривой. Если по5 прежнему т.Изм и t не совпадают, то возникает сигнал рассогласования соответствующей полярности, и процесс регулирования будет продолжен. Он будет происходить до тех пор. пока искусственный желудочек 4 не выйдет на
0 физиологический режим работы, чему будет
соответствовать равенство сигналов тизм и t.
Искусственное сердце дополнительно
снабжено датчиком 12 крайнего диастолическрго положения вытеснителя, который
5 соединен с другим входом блока 7 измерения положения мембраны. В этом случае блок 7 измерения положения мембраны измеряет промежуток времени движения вытеснителя 3 из его крайнего близлежащего
0 положения к приводу 1 вытеснителя до момента встречи с мембраной 5. В функциональный преобразователь 8 в этом случае закладывается зависимость времени движения вытеснителя 3 от его крайнего, близ5 лежащего к приводу 1 вытеснителя, положения до встречи с мембраной 5 и периода работы вытеснителя 3, соответствую- щая физиологическому режиму работы искусственного желудочка 4. Эта зависимость получается при тарировке искусственного сердца в режимах работы, соответствующих физиологическому. Введение датчика 12 крайнего диастолического положения вытеснителя позволяет исключить влияние ложных сигналов о возможном касании вытеснителя 3 и мембраны 5 в промежуточном положении на работу искусственного сердца, что повышает надежность работы искусственного сердца; кроме того, длительность интервала времени t в этом случае меньше, и относительное значение изменения величины t в различ ных режимах работы к абсолютному ее значению возрастает, что позволяет повысить точность измерения величины t.
Формул а изоб рете.н ия 1. Искусственное сердце, содержащее искусственный желудочек, привод вытеснителя, вытеснитель и функциональный преобразователь, датчик расхода, соединенный с входом измерителя ударного выброса, и блок управления, соединенный с приводом вытеснителя, отличающееся
тем, что, с целью повышения надежности и физиологичности управления, оно снабжено блоком измерения положения вытеснителя, схемой сравнения, причем
вытеснитель жестко соединен с выходным звенсЛи привода вытеснителя, а датчиком расхода является датчик положения мембраны, расположенный на вытеснителе, измерителем ударного выброса и является
блок измерения положения мембраны, при этом вход блока измерения положения вытеснителя соединен с входом блока измерения положения мембраны, его выход через функциональный преобразователь соединен с вторым входом схемы сравнения, первый вход которой соединен с блоком измерения положения мембраны, а выход - с входом блока управления.
4 г
Фиг,3Ьi
Фиг. 4
| Устройство управления протезом сердца | 1979 |
|
SU858843A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
