Изобретение относится к транспортному машиностроению, предназначено для использования, преимущественно, в гусеничных машинах, и может найти применение и в других отраслях машиностроения в качестве гидромеханической передачи,
обе двуз
спечивающей регулируемый привод .потребителей от одного источника механической энергии (приводного вала).
. Цель изобретения состоит в повышении ресурса и расширении функциональных
возможностей дифференциального механизма поворота гусеничных машинах.
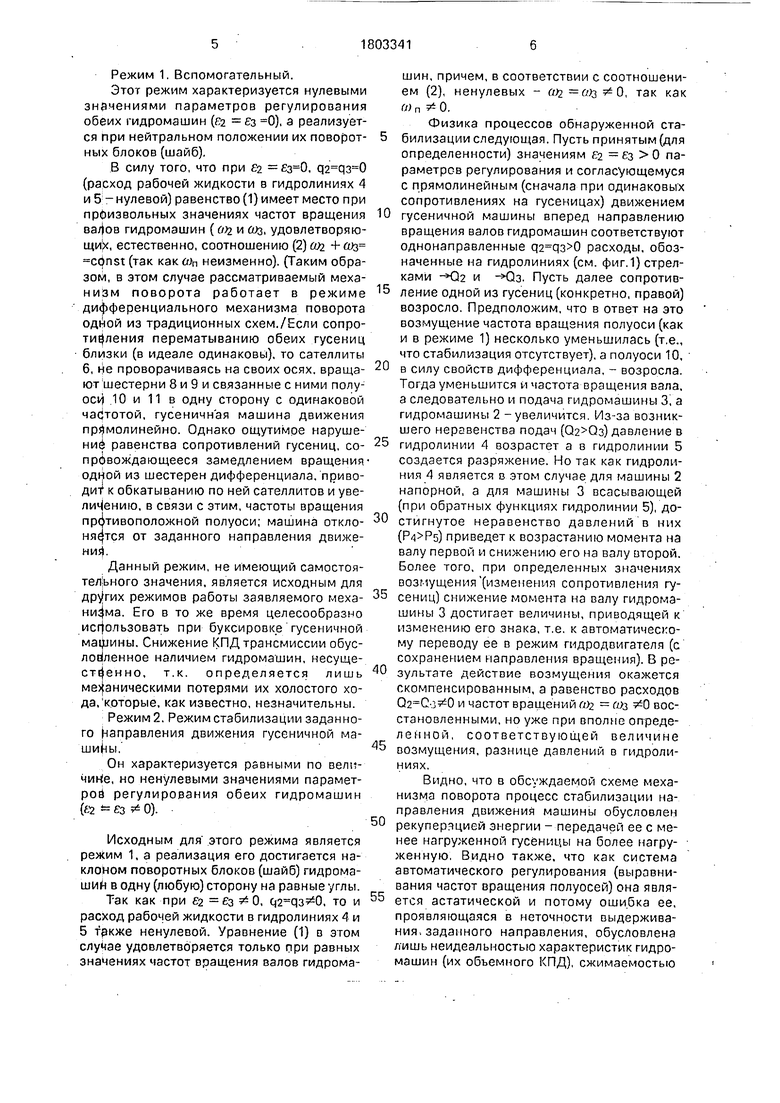
На фиг.1 представлена гидрокинематическая принципиальная схема механизма с простым дифференциалом; на фиг.2 - с двойным; на фиг.З - пояснение включения в схему гидрораспределителя и дросселей.
Схема управления механизмом, реализующая согласованные воздействия на управляющие звенья гидромашин, гидрораспределителя и дросселей не конкретизируется.
OD О
W СО
Заявляемый механизм поворота гусеничной машины содержит дифференциал 1 (простой, как на фиг.1, или двойной -фиг.2) и две объемные регулируемые гидромашины 2 и 3, соединенные между собой гидролиниями 4 и 5. (Неизбежно присутствующие в гйдросистем.ах элементы обеспечения их работоспособности - клапаны, фильтры, элементы подпитки и пр. - опущены).
Ведущими звеньями дифференциала являются сателлиты 6 и 7, соединенные (в данном случае через корпус дифференциала) с приводным валом. Ведомые звенья - шестерни 8 и 9 - непосредственно закреплены на полуосях 10 и 11 приводом движителей (гусениц). Управляющими звеньями двойного (см. фиг.З) дифференциала являются шестерни 12 и 13; в случае простого дифференциала (см.фиг, 1) их функции совмещают ведомые шестерни 8 и 9. Управляющие звенья дифференциалов кинематически - редукторами 14 и 15 - постоянно связаны с валами соответствующих гидромашин.
В изображенной на рис.3 позиции гидрораспределителя каналы его секции 17 соединяют левые с правыми участки . гидролиний 4 и 5 напрямую, т.е. в полном соответствии со схемами на фиг.1 и 2. Каналы секции 16 соединяют эти же участки через регулируемые дроссели 19, которые нормально (в исходном состоянии) полностью открыты. В позиции гидрораспределителя, когда задействована секция 18, те же участки, каждой из гидролиний через свой нормально закрытый регулируемый дроссель 20, соединены со сливом. Таким образом, переключения гидрораспределител,я, не сопровождаемые воздействиями на дроссели, по сути, ничего не меняют. Более того, наличие секции 17 оказывается не обязательным, так как ее функии способны выполнять (совмещать) как секция 18, так, в общем то, и секция 16. Поэтому секция 17, сохраняемая для удобства пояснений, изображена пунктиром. Пунктиром изображе- на и секция 21, наличие которой также может оказаться полезным в эксплуатации. Гидрораспределитель может содержать и другие дополнительные секции, в соответствии с потребностями каждого конкретного применения заявляемого механизма.
В случае же трехсекционного гидрораспределителя, конструкцию его целесообразно выполнять поворотной. В этом случае, в силу закольцованное™ золотника, повышается мобильность перехода с одного режима работы механизма на другой переключением гидрораспределителя из каждой его позиции непосредственно в любую другую(в.частности, из позиции 16 в 18. минуя позицию 17)./
В дальнейшем, с целью конкретизации изложения, полагается, что обсуждаемый механизм поворота укомплектован идентичными гидромашинами аксиально-порш- невого типа и, что частота вращения приводного вала если это не оговаривается дополнительно, неизменна. (Оба эти усло
вия не принципиальны и не отражаются на
существе предложения).
Основные особенности заявляемого механизма состоят: в последовательном гидравлическом соединении гидромашин 2 и 3,
а также в жёсткой кинематической связи валов гидромашин с полуосями привода движителей, что справедливо и для схемы с двойным дифференциалом (фиг.2).
Первая из этих особенностей обусловливает равенство расходов гидромашин (0.) во всех режимах работы), которое с учетом очевидного соотношения ), где ш - частота вращения вала, a q - удельный (за один оборот) расход ее - выражается так
(1)
Объемным гидромашинам свойственна монотонная (конкретно, прямая) зависимость величины их удельного расхода (Ј) - от значения параметра регулирования. При этом изменение знака Ј, т.е. направления наклона поворотного блока (шайбы) гидромашины, влечет за собой изменение и знака q (изменение направления расхода), а при нулевом значении к. т.е. нейтральном положении наклонно.го блока (шайбы), удельный расход также равен нулю - q I .
Вторая особенность предполагает пропорциональность частот вращения валов гидромашйн 2 и 3 частотам вращения связанных с ними полуосей 10 и 11, соответственно, с коэффициентом пропорциональности 1Р, равным передаточному отношению редукторов 14 и 15. В силу известного свойства дифференциалов частоты вращения валов гидромашин связаны между собой соотношением
0)2 + («3
ip ig (n .
(2).
где (t)n - частота приводного вала (приведенная к сателлитом дифференциа- ла); Ig - передаточное отношение дифференциала: - ДЛЯ ПРОСТОГО (фИГ.1). - ДЛЯ
двойного (фиг.2).
Заявляемому механизму поворота свойственны следующие режимы работы.
Режим 1. Вспомогательный.
Этот режим характеризуется нулевыми значениями параметров регулирования обеих гидромашин (fy Ј3 0), а реализуется при нейтральном положении их поворотных блоков (шайб).
В силу того, что при ег , (расход рабочей жидкости в гидролиниях 4 и 5 -нулевой) равенство (1) имеет место при произвольных значениях частот вращения ва/|ов гидромашин (ОУг и соз, удовлетворяющих, естественно, соотношению (2) +Шз cbnst (так неизменно). (Таким образом, в этом случае рассматриваемый механизм поворота работает в режиме дифференциального механизма поворота одной из традиционных схем./Если сопро- ти4ления перематыванию обеих гусениц близки (в идеале одинаковы), то сателлиты 6, не проворачиваясь на своих осях, вращают шестерни 8 и 9 и связанные с ними полуоси .10 и 11 в одну сторону с одинаковой частотой, гусеничная машина движения прямолинейно. Однако ощутимое нарушение равенства сопротивлений гусениц, сопровождающееся замедлением вращения- одной из шестерен дифференциала, приводит к обкатыванию по ней сателлитов и уве- , в связи с этим, частоты вращения противоположной полуоси; машина откло- няе/гся от заданного направления движе- ни4.
Данный режим, не имеющий самостоя- тел ьного значения, является исходным для других режимов работы заявляемого меха- . Его в то же время целесообразно использовать при буксировке гусеничной машины. Снижение КПД трансмиссии обусловленное наличием гидромашин, несуще- , т.к. определяется лишь механическими потерями их холостого хода, которые, как известно, незначительны.
Режим 2. Режим стабилизации заданного Направления движения гусеничной ма- шийы,
Он характеризуется равными по вели- чине, но ненулевыми значениями параметров регулирования обеих гидромашин
(Ј2 Ј3 # 0).
Исходным для этого режима является режим 1, а реализация его достигается наклоном поворотных блоков (шайб) гидрома- ший в одну (любую) сторону на равные углы.
Так как при Ј2 Ј3 0, С(, то и расход рабочей жидкости в гидролиниях 4 и 5 также ненулевой. Уравнение (1) в этом случае удовлетворяется только при равных значениях частот вращения валов гидромашин, причем, в соответствии с соотношением (2), ненулевых - ( (1)3 0, так как м п & О,
Физика процессов обнаруженной ста- билизации следующая. Пусть принятым (для определенности) значениям &i - Јз 0 параметров регулирования и согласующемуся с прямолинейным (сначала при одинаковых сопротивлениях на гусеницах) движением
гусеничной машины вперед направлению вращения валов гидромашин соответствуют однонаправленные расходы, обозначенные на гидролиниях (см. фиг.1) стрелками .2 и -Юз. Пусть далее сопротивление одной из гусениц (конкретно, правой) возросло. Предположим, что в ответ на это возмущение частота вращения полуоси (как и в режиме 1) несколько уменьшилась (т.е., что стабилизация отсутствует), а полуоси 10,
в силу свойств дифференциала, - возросла. Тогда уменьшится и частота вращения вала, а следовательно и подача гидромашины 3i a гидромашины 2 -увеличится. Из-за возникшего неравенства подач () давление в
гидролинии 4 возрастет а в гидролинии 5 создается разряжение. Но так как гидролиния 4 является в этом случае для машины 2 напорной, а для машины 3 всасывающей (при обратных функциях гидролинми 5), достигнутое неравенство давлений в них () приведет к возрастанию момента на валу первой и снижению его на валу второй. Более того, при определенных значениях возмущения (изменения сопротивления гусениц) снижение момента на валу гидромашины 3 достигает величины, приводящей к изменению его знака, т.е. к автоматическому переводу ее в режим гидродвигателя (с сохранением направления вращения). В результате действие возмущения окажется скомпенсированным, а равенство расходов 0. и частот вращений 0 восстановленными, но уже при вполне огтреде- лениой, соответствующей величине
возмущения, разнице давлений в гидролиниях.
Видно, что в обсуждаемой схеме механизма поворота процесс стабилизации направления движения машины обусловлен
рекуперацией энергии - передачей ее с менее нагруженной гусеницы на более нагруженную, Видно также, что как система автоматического регулирования (выравнивания частот вращения полуосей) она является астатической и потому ошибка ее, проявляющаяся в неточности выдерживания, заданного направления, обусловлена лишь неидеальностью характеристик гидромашин (их объемного КПД), сжимаемостью
рабочих жидкостей (содержащих пузырьки) и податливостью стенок трубопроводов гидролиний. Степень стабилизации, выражающаяся в точности выдерживания направления, зависит от типоразмера используемых гидромашин, а для каждого конкретного типоразмера определяется величиной задаваемого значения параметров регулирования. С ростом его ( i Б I ) степень стабилизации также возрастает. При этом, однако, увеличиваются и гидравлические потери, снижающие энергетический КПД заявляемого механизма поворота, а, следовательно, и всей трансмиссии в целом. Эти потери ощутимо большие, чем в режиме 1. Но.в современном транспортном машиностроении с такими потерями мирятся и не только в случае гусеничных машин с их существенно более высокими затратами энергии на перемотку гусениц, чем у колесных. Оптимизация рабочего режима заявляемого механизма поворота достигается правильным выбором величины параметров регулирования гидромашин; исходящего из уровня уводящих моментов и нагрузок, различных для различных условий эксплуатации. С этой точки зрения режим 1 следует рассматривать, как частный случай режима 2t когда Ј2 . Ему соответствует нулевое значение степени стабилизации и минимальный уровень (в идеале нуль) потерь. Решающим же является то обстоятельство, что гидромашины не находятся в основной цепи передачи энергии от двигателя к движителю; преобразованию с их невысоким КПД подлежит лишь часть, притом существенно меньшая, общего количества энергии, тратящейся в передвижении машины.
Режим 3: Режим стабилизации радиуса поворота.
Режим характеризуется разновеликими одинакового знака значениями параметров регулирования гидромашин (Ј2 5 Бз , Ј2/Јз 5:0).
Исходными для этого режима являются режимы 1 и 2, а реализуется он наклоном поворотных блоков (шайб) гидромашин в од- ну от нейтрального их положения сторону на разные углы.
Так как при Ј2 ЕЗ, , то из уравнения (1) следует, что и ад ад, причем различным отношениям удельных расходов гидромашин соответствуют обратные отношения частот вращения их валов, жесткая же кинематическая связь валов гидромашин с полуосями движителей обеспечивает различные скорости перематывания гусениц; гусеничная машина совершает плавный поворот.
0
5
0
5
0
5
0
5
0
5
Процессы стабилизации, аналогичные подробно изложенным при описании предыдущего режима работы, в данном случае обеспечивают стабильность радиуса поворота (при сохранении неизменными значений ). Направление поворота определяется потрошением абсолютных значений параметров регулирования: при I Ј2 I I Јз I - поворот направо; при - прямолинейное движение; при I Ј2 I I Јз I - поворот налево. При этом большим отклонениям значений отношения I Јa I/I Јз I (или обратного ему) от единицы соответствуют меньшие радиусы поворота, Изменение же радиуса поворота осуществляется (в том числе и в ходе самого поворота) изменением углов наклона поворотных блоков (ш айб) гидромашин.
В режиме поворота увеличение частоты вращения вала одной гидромашины сопровождается, в силу свойств дифференциала, снижением частоты вращения другой. Такое снижение в рамках данного режима доходит до полной остановки (и заторможенности) последней и достигается приведением поворотного блока (шайбы) противоположной гидромашины в нейтральное положение.
В варианте заявляемого механизма поворота с простым дифференциалом (см.фиг.1) при этом оказывается заторможенной соответствующая полуось и гусеница, вокруг которой и осуществляется развороте радиусом, равным половине расстояния между гусеницами. Действительно, пусть поворотный блок одной гидромашин (конкретно левой)установлен в нейтральное положение .. В этом случае величина ее удельного расхода , при любой частоте вращения вала. Для правой гидромашины, параметр регулирования которой отличен от нуля (Јз ) имеем; согласно уравнению (1), одз & 0.Это и понятно, т.к. при нейтральном положении своего поворотного блока (шайбы) гидромашина 2 полностью (в идеале) разъединяет гидролинии 4 и 5 независимо от того вращается она или неподвижна. Вызванное этим неизбежное возрастание (в идеале неограниченное) давления в напорной лини гидромашины 3 препятствует ее вращению, а значит правая полуось оказывается заторможенной. Левая же полуось при этом в силу свойств дифференциала, вращается с удвоенной частотой, не испытывая со стороны работающей на холостом ходу гидромашины 2 никаких (опять же в идеале) воздействий.
В варианте механизма поворота с двойным дифференциалом (см. фиг.2) заторможенность одной из управляющих шестерен
12 или 13 не приводит, как известно, к останову соответствующей полуосевой шестерни 8 или 9. Поэтому полуось отстающей гусеницы продолжает вращаться с вполне определенной частотой, обеспечивающей минимальные значения радиуса поворота, который, как следует из теории этого механизма, в ig раз больше, чем для случая с простым дифференциалом (,, где $ - расстояние между гусеницами. В то же ёремя. применение двойного дифференци- , обеспечивающего, как известно, реку- перацию энергии (с отстающей на обгоняющую гусеницу), увеличивает момент, осуществляющий разворот гусеничной машины.
Режим 4. Режим крутого разворота.
Режим характеризуется разновеликими разных знаков значениями параметров регулирования гидромашни ( I Ј2 I 5 I Јз I,
О Ј2/Ј3 -1).
Исходными для этого режима являются режимы 1 или 2, а реализуется он наклоном Поворотных блоков (шайб) гидромашин в разные стороны на разные по абсолютной величине углы.
Разным по знаку значениям парамет- ррв регулирования соответствуют разно- направленные удельные расходы гйдромашин. При этом нетравиальное (при- врдной вал вращается) решение уравнения расходов (1) достигается лишь при обратных знаках частот вращения их валов
Физически это объясняется следую-. и|им. В случае разнонаправленных накло- нрв поворотных блоков (шайб) гидромашин и-одинаковых направлениях вращения их вЬпов расходы рабочего тела оказались бы встречными (стрелки и -КЗз на фиг. 1), nio для замкнутой системы ..циркуляции нереально. В то же время, в силу различия. абсолютных значений углов наклона блоков (щайб), а значит и соответствующих им величин удельных производительностей, а тйкже того, что в этом случае напорной для офеих гидрома.шин является одна и та же гффолиния (пусть гидролиния 5) на валах их создаются неодинаковые по величине мо- . (В теории гидропривода величина момента на валу гидромашины определяет- csj выражением Ар, где а - коэффици- BI-IT; Ар - напор, одинаковый в данном случае для обеих гидромашин). При этом мфньшее по модулю значение момента при- гидромашине с меньшей удельной производительностью, т.е. той, поворотный б/1ок (шайба) которой отклонен на меньший
от нейтрального положения угол. Пусть (для конкретности) I Ј2 I I Јз I. тогда Iq2 I 1рз1. а значит и Мз1 . В связи с этим, вращение от приводного вала через
дифференциал 1 и редуктор 15 будет передаваться именно гидромашине 3 (так как момент сопротивления ее вала меньше, чем у гидромашины 2), которая, осуществляя подачу рабочей жидкости в гидролинию 5,
повысит давление в ней до уровня, достаточного для перевода гидромашины 2 в режиме гидродвигателя с обратным направлением вращения вада. Последняя, работая в таком режиме, вращает через редуктор 14 полуось 10 и перематывает в обратном же направлении левую гусеницу, обеспечивая дальнейшее (в сравнении с режимом 3) уменьшение радиуса поворота гусеничной машины.
Следует отметить существование ограниченности такого уменьшения, связанную с тем, что встречное вращение шестерен дифференциала, в силу его свойств (см. формулу (2), увеличивает разность частот их вращения, определяющую скорость разворота машины. Последняя, однако, ограничена как мощностными возможностями привода, так и соображениями целесообразности ее увеличения.
Режим 5. Режим стояночной заторможенности.
Режим, характеризуется ненулевыми равновеликими значениями параметров регулирования разных знаков Ј2 - Јз .
Реализуется данный режим наклоном поворотных блоков (шайб) гидромашин в разные стороны на равные углы (при отключенном приводе).
Так как при Ј2 Јз 0, , то, в
соответствии с (1) ал - од. Из выражения (2), однако, в этом случае получаем: . Реально это означает, что система уравнений (1) и (2) имеет лишь тривиальное решение зд .
Невозможность встречной направленности расходов приводит к заторможенности обеих гидромашин, блокировке дифференциала, а следовательно и заторможенности полуосей и приводного вала,
который поэтому должен быть отсоединен от двигателя муфтой сцепления, либо переводом коробки передач в нейтральное положение.
Гусеничная машина неподвижна и заторможена. Вследствие неидеальности объемного КПД гидромашин целесообразно в этом режиме использовать близкие к 1 абсолютные значения параметров регулирования.
Дальнейшее расширение функционал н ых возможностей заявляемого механизма поворота достигается введением в его схемы (см.фиг. 1 и 2) представленного на фиг.З гидрораспределителя. Всему сказанному выше целиком и полностью отвечает его исходная, изображенная на этом рисунке позиция, либо его позиции в положении секций 16 или 18, при исходных состояниях регулируемых дросселей 19 и 20, соответственно,
Режим б. Режим торможения при прямолинейном движении машины.
Исходным для него является режим 2. Реализуется же он переводом гидрораспределителя в позицию секции 16 с последующим частичным перекрытием обеих дросселей 19.
В результате дросселирования рабочей жидкости давление в напорных для каждой из гидромашин участках гидролиний, расположенных перед дросселями, возрастает. Вызванное этим возрастание моментов на валах гидромашйн и связанных с ними полуосях. 10 и 11 обеспечивает торможение гусеничной машины. Переход на этот режим должен сопровождаться синхронным воздействием на двигатель или муфту сцепления, обеспечивающим (как и обычно) необходимое снижение мощности на приводном валу, Полное перекрытие дроссе- лей, блокирующее дифференциал, обеспечивает стояночное торможение.
Режим 7. Режим торможения при поворотах гусеничной машины.
Исходным для этого режима является режим 3, а реализация и процессы, обеспечивающие торможение, полностью соответствуют таковым в режиме 6.
Режим 8. Режим замедленного разворота машины.
Исходным для него является режим 4. Реализация этого режима достигается переводом гидрораспределителя в позицию секции.18 и частичным открытием того из дросселей 20, который расположен на на- порной (в данном случае) гидролинии.
Перепуск части рабочей жидкости на слив снижает частоту вращения вала гидромашины, работающей в режиме гидродвигателя, связанной с нею полуоси и. как следствие (в силу свойств дифференциала) второй полуоси. Это и приводит к уменьшению скорости разворота гусеничной машины. Устранение дефицита рабочей жидкости в гйдросистеме осуществляется элемента- . ми ее подпитки.
Режим 9. Режим торможения.
Он может оказаться полезным, например, при буксировке машины. Исходным
для него является режим 5, а реализуется он переводом гидрораспределителя в позицию секции 18 и частичным или полным открытием дросселей 20.
При полностью открытых дросселях 20 сопротивление вращению полуосей 10 и 11, вносимое гидромашинами, определяется их механическими потерями и гидравлически0 ми, зависящими от значений установленных параметров регулирования. По мере перекрытия дросселей 20 гидравлические потери резко возрастают, обеспечивая торможение полуосей. При полностью пере5 крытых дросселях, в соответствии с режимом 5, осуществляется стояночное торможение гусеничной машины,
Стояночное торможение может быть . обеспечено и переводом гидрораспредели0 теля в позицию секции 21 при любых ненулевых (лучше близких k+1) значениях параметров регулирования.
Таким образом применение заявляемого механизма поворота, существенно упро5 щая конструктивно схемы трансмиссий гусеничных машин, устраняет необходимость использования в них фрикционных узлов (в том числе и тормозов), повышая тем самым их ресурс и надежность.
0 Формула изобретения
1. Механизм поворота преимущественно гусеничной машины, содержащий механический дифференциал с ведущим и управляющими звеньями, а также ведомы5 ми, взаимодействующими с полуосями привода движителей, две регулируемые, гидравлически сообщенные одна с другой объемные гидромашины, валы которых постоянно связаны суправляющими звеньями
0 дифференциала, и систему управления гидромашинами, отличающийся тем, что, с целью расширения функциональных возможностей и повышения эффективности, связь ведомых звеньев дифференциала с
5 полуосями движителей выполнена жесткой, а постоянная связь валов гидромашин суправляющими звеньями дифференциала выполнена в виде ряда постоянного зацепления с размещением шестерни мень0 шего диаметра на валу соответствующей гидромашины.
2. Механизм по п.1, о т л и ч а ю щ и и - с я тем. что система управления гидромашинами включает в себя установленный в 5 гидролинии связи гидромашин гидрораспределитель, секция одной из позиций которого выполнена с каналами сообщения между собой через регулируемые дроссели, разделенные гидрораспределителем участки, каждой из гидролиний, а секция другой
- каналами соединения упомянутых участ-3. Механизм по п.2, о т л и ч а ю щ и и кор каждой гидролинии через регулируемыйс я тем, что гидрораспределитель выполнен
дроссель со сливом.трехпозиционным кранового типа.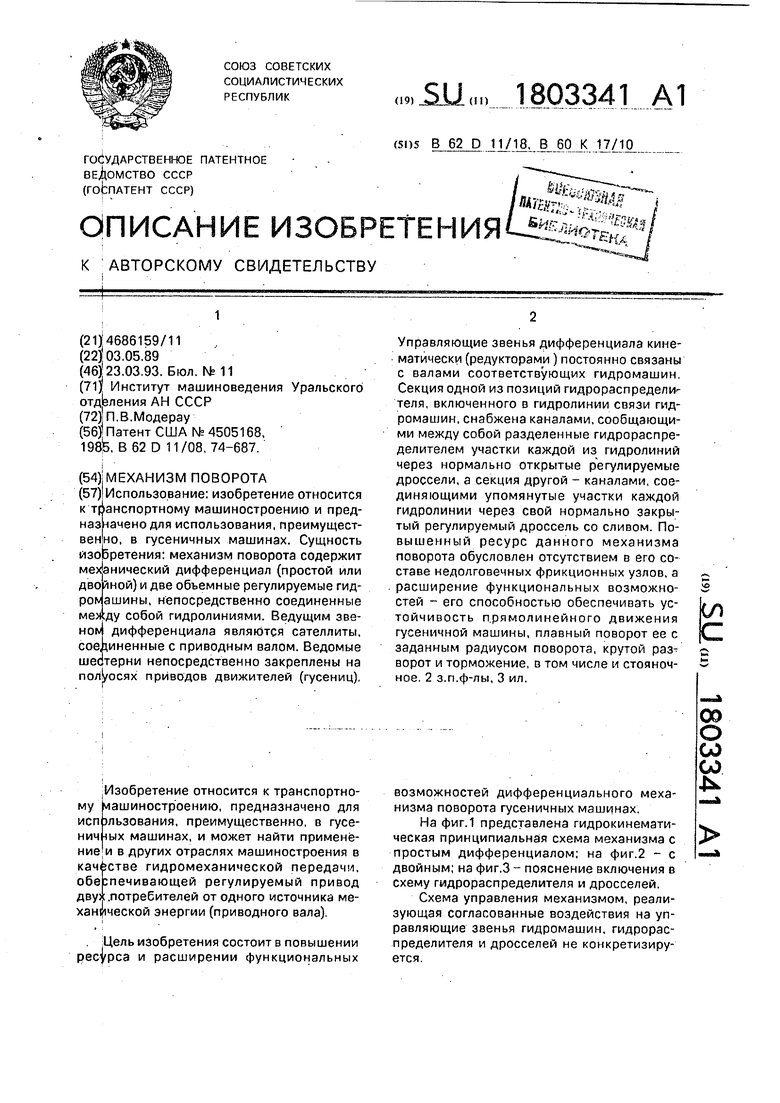




| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОЧЛЕНЕННОЙ ДВУХТЕЛЕЖЕЧНОЙ ГУСЕНИЧНОЙ МАШИНОЙ | 1993 |
|
RU2089431C1 |
| Ведущий мост транспортного средства | 1989 |
|
SU1699824A2 |
| Гидромеханический ходоуменьшительдля зЕМлЕРОйНОй МАшиНы | 1979 |
|
SU819285A1 |
| КОЛЕСНАЯ МОДИФИКАЦИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2010 |
|
RU2432293C1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |

|Использование: изобретение относится к транспортному машиностроению и пред- назйачено для использования, преимущественно, в гусеничных машинах. Сущность изобретения: механизм поворота содержит механический дифференциал (простой или двойной) и две объемные регулируемые гидромашины, непосредственно соединенные между собой гидролиниями. Ведущим звеном дифференциала являются сателлиты, соединенные с приводным валом. Ведомые шестерни непосредственно закреплены на полуосях приводов движителей (гусениц). Управляющие звенья дифференциала кинематически (редукторами) постоянно связаны с валами соответствующих гидромашин. Секция одной из позиций гидрораспределителя, включенного в гидролинии связи гидромашин, снабжена каналами, сообщающими между собой разделенные гидрораспределителем участки каждой из гидролиний через нормально открытые регулируемые дроссели, а секция другой - каналами, соединяющими упомянутые участки каждой гидролинии через свой нормально закрытый регулируемый дроссель со сливом. Повышенный ресурс данного механизма поворота обусловлен отсутствием в его составе недолговечных фрикционных узлов, а расширение функциональных возможностей - его способностью обеспечивать устойчивость прямолинейного движения гусеничной машины, плавный поворот ее с заданным радиусом поворота, крутой разворот и торможение, в том числе и стояночное, 2 з.п.ф-лы, 3 ил. ел с
&
1
j
/
f0..
d
#. 2
s/
-/5
/
.. ///
v
;ff
7 л
/3
л
I--
V
№ r1 i
и и
| Патент США № 4505168, 198Ь, В 62 D 11/08, 74-687. |
