Изобретение относится к транспортному машиностроению, г части тети ч трасмиссиям транспортных спеде в с хо- аоуменыимтелями, и являггся усовершенствованием м о с г а п: основному авт.св. № 1586928,
Цель изобретения - повышение экономичности работы ведущего моста в режиме ходоуменьшения путем уменьшения потир1- мощности на дросселирование рабочей жидкости в гидротормозе.
Указанная цель достигается тем, ч го ведущий мост снабжен дополнительной гидромашиной, кинематически связанной , второй полуосью и напорная магистраль которой через регулгруемый дроссель подключена к чапорчоп магистрали гидротормоза,
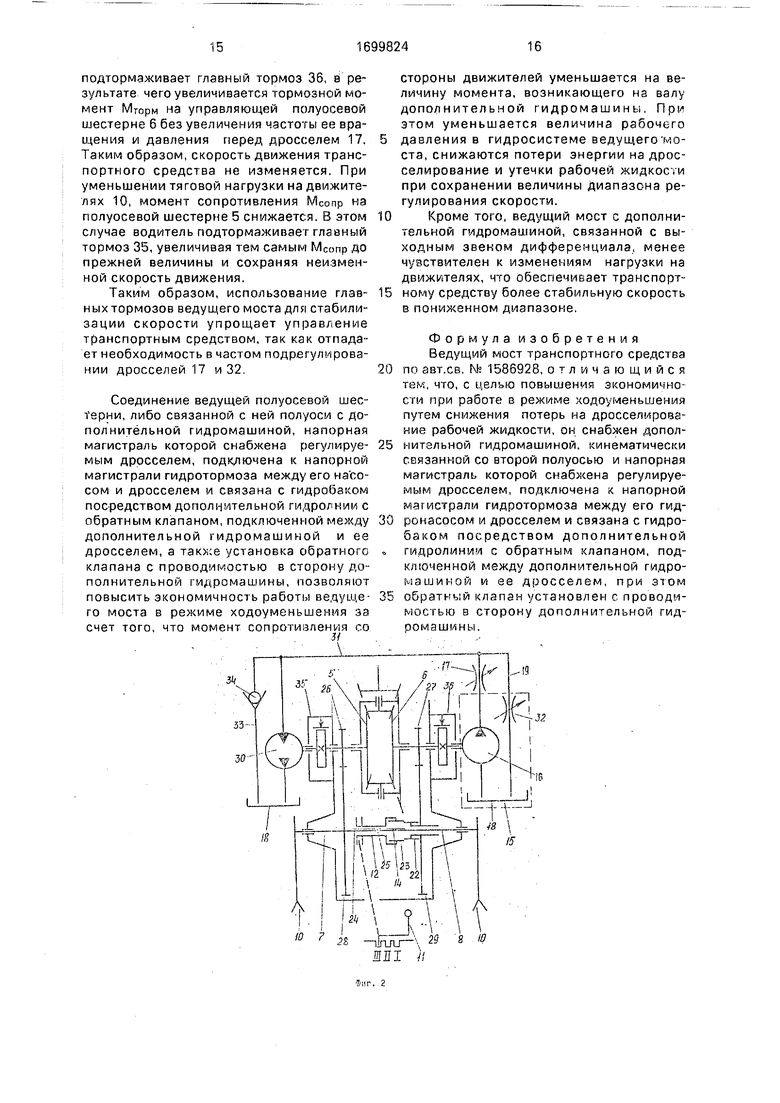
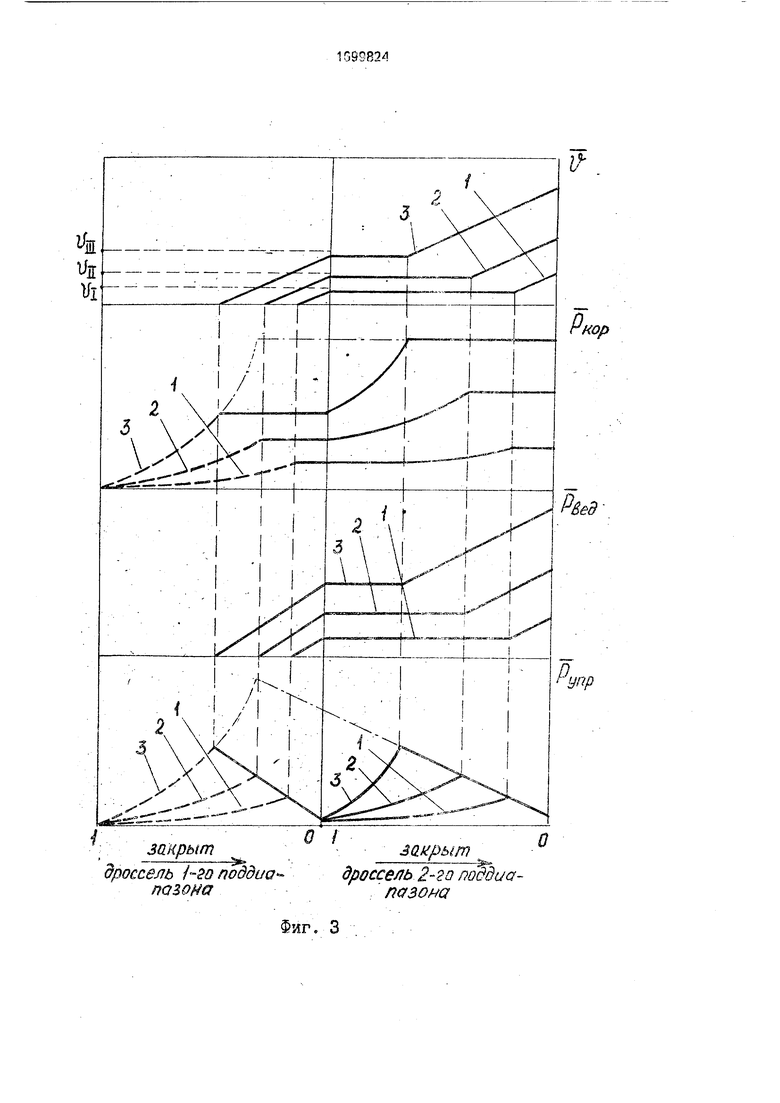
На фмг.1 изображена принципиальная схема устройства применительно и вецун е fiv мосту самоходного шасси Т - Х6М на биг 2 - схема устройства, реализованная в ведущее мосту ipaaopa Беларусь1, ма 3 - зависимости относительной мошно- сти, подводимой к различным звеньям дифференциала и скорости транспортного средства от безразмерных парапет рев ге- гулировги ля дросселей 1-io i-. 2-го пазонов, иа фыг 4 - графики бзла- Сй мощности на дибференциале ведущего моста Б фу. ojHOCMTe -iHO сгореть двихения транспортного средства
Ведущий мост транспиргно средства (фи( 1) содержит уС|аноаленно 1 1 в кар тере межколесный дифферен1 мзл 1, корпус 2 которого кинема инеск связан с двигателем 3. Сателлиты 4 зацеплткмср с полуосезыми шестерчями 5 и 6, полуоси -7 и 8 посредством бортовых передач 9 связаны с движителями 10 Ведущий гчосг снабжен управляющим механизме li кинематически связанным г подзиялым элемен10м 12 Последней рч мгщен на пс- луоси 8 и снабжен соедини тельными ментами (шлицами) 13 для связ i
соединитетьным э/ .ьнаптз /и шлицами) 14 .юлуоси 8. Ведуи;ий мост снабжен гидро топмозом 15, состоящим из i б поото- яы-iOro , реи/липуэ.оги дгисгеля 17
и гидробакз i8, Fer .и. уемь й n,f оссель 17 установлен в напорной магистра/ / 19 насоса 16. Попуосеваг шестерня 6 устгнорпоЧа с возмохностью свободного вращения от носительно соответствующе/ ей пслуос.1/ 8
и снабжена с, венцом 20, заиегля- ЮЩИМСР с зубчатым сениом 21, закрепленным .а валу насоси 1G. роме ю о полуп:епсл шестерия 6 снЈР.энэ соединительными спемечтами зyбaяr iч-1ьли4u,У
5 эНитре жего зацепления) 22 для свтзи с соедини ельными элементами (зубьчмч ьа- зацепления) 3 подвижно1 с эломеит 12 Пол/ось 7 снабхакс соео г тетишм), злементами-иилицсг л (
0 нярухного зацепление) 24 с о- ар нктельпыми с лемен i SMI o/b ii-i .ми знугренного Зз бплени) 25 аыполнсмнь М ч на лсдэи спо л 7-ic, , -е 1. Управляющий механмз 1 i Bvr.ci ics
Ь Тр8ХПОЗИЦИОННЬ,М В ПЭрЬЧЙ ПОЗг
|фиг 1} зубы, 22 полуоссвой б за цепляются с зубьями 23 подвижного элэ- ментс; 12 Последний ьосреа вом и пицчз 1C, - ацепля ощи,ся со ШЛУ.П.Е VA M GU, сгг
O с полуосью 8.
Трким образом, э первой пози,., уп- раьляющего exaнизмd И пор осеогр шестерня G хестко связана с по п/т.сыо 8.
Во второй посиции зубья 23 поавилчэ
Ь го элемента 12 зацепляются с зубьями 22 полуосевой шестерни Ь а зубья 25 - с зубьями 24 полуоси . Подвижней элемент 12 посредством шл цевого соединения 13- К жестко связан с полуосью 8. В результате обеспечивается жесткая связ между обей
0 ми полуосями 7 и 8, а также Р.ажду nonvoce- 5мии шестернями 5 и б
В третьей позиции оубьп 25 подоиж огс 12 зацепляются с з бьрм . 24 по- ,и 7, 22 и 23 разомчнуы ный элемент 12 связан с полуосью а шлице- вым соединением 13-14. При этом обе полуоси 7 и 8 жестко связаны с полуосевой шестерней 5, а полуосевая шестерня 6 получает возможность свободного вращения относительно полуоси 8.
В устройстве по фиг.2 полуосёвые шес- трени 5 и 6 Дифференциала 1 связаны с полуосями 7 и 8 движителей 10 посредством конечных передач. Последние включают в себя два вала-шестерни 26 и 27, зацепляющихся с полуосевыми шестернями 28 и 29. Полуоси 7 и 8 снабжены шлицами 24 и 14 соответственно. Подвижный элемент 12 представляет собой зубчатую полумуфту с внутренними шлицами 25 для связи с наружными шлицами 14 и 24 соответственно полуосей 8 и 7. Полуосевая шестерня 29, расположенная со стороны гидротормоза 15, установлена на полуоси 8 свободно и снабжена зубьями 22 для связи с зубьями 23 подвижного элемента 12. В ведущем мосту по фиг.1 полуось 7 жестко связана с дополнительной гидромашиной 30. В устройстве по фиг.2 дополнительная гидромашина 30 связана с полуосевой шестерней 5 дифференциала 1 посредством вала-шестерни 26. В напорной магистрали 31 гидромашины 30 установлен регулируемый дроссель 32. Напорная магистраль 31 дополнительной гидромашины ЗО подключена к напорной магистрали 19 гидротормоза 15 между насосом 16 и дросселем 17. Напорная магистраль 31 связана с гидробаком 18 посредством гидролинии 33 с обратным клапаном 34. Гидролиния 33 подключена к напорной магистрали 31 между гидромашиной 30 и дросселем 32, а обратный клапан
34установлен с проводимостью в сторону гидромашины 30.
В ведущем мосту самоходного шасси Т - 16М (фиг.1) насос 16 гидротормоза 15 установлен на задней стенке корпуса трансмиссии, а дополнительная гидромашина 30 - на корпусе бортовой передачи 9 и может быть связана с полуосью 7 либо с хвостовиком бокового ВОМ, который выполнен за одно целое с осью движителя 10.
В ведущем мосту трактора Беларусь (фиг:2) насос 16 и гидромашина 30 установлены на корпусах главного тормоза левого
35и правого 36 движителей 10 соответственно.
Валы гидромашин 16 и 30 установлены в отверстия валов-шестерен 27 и 26 соответственно, что делает их легкодоступными и легкосъемными,
Мост работает следующим образом.
Крутящий момент от двигателя 3 подается к корпусу 2 межколесного дифференциала 1, Вращение от корпуса 2 через сателлиты 4 передается на полуосевые о,е- 5 стерни 5 и 6 дифференциала 1. Частота вра- щен.1я движителей 10 определяется режимом работы устройства.
1. Режим дифференциального привода движителей.
0 Управляющий механизм 11 установлен в позицию I. В устройстве по фиг.1 вращение от полуосевой шестерни 5 передается .на жестко связанную с ней полуось 7 и через левую бортовую передачу 9 на движи- 5 тель 10.
Вращение от полуосевой шестерни 6 через зубья 22 и 23 передается на подвижный элемент 12, от него через шлицы 13 и 14 на полуось 8 и через правую бортовую переда- 0 чу 9 на движитель 10 правого борта. Зубчатый венец 20 полуосевой шестерни 6 приводит во вращение шестерню 21 и вал насоез 16 гидротормоза 15. Насос 16 всасы- вает рабочую жидкость из бака 18 и подает 5 в напорную магистраль 19.
Вращение от полуоси 7 передается на вал г дромашины 30. Рабочая жидкость к последней поступает частично из бака 18 через плдролинию 33, обратный клапан 34 и 0 напорную магистраль 31 (которая в первом режиме движения выполняет функцию всасывающей магистрали), и частично через полностью открытый дроссель 32 от насоса 16. Дроссель 17 также полностью открыт, 5 Давление в напорных магистралях 19 и 31 отсутствует и гидромашины 16 и 30 не препятствуют вращению полуосевых шестерен 5 и 6.
8 ведущем мосту по фиг.2 вращение от Q полуосевой шестерни 5 передается на вал- шестерню 26. Последняя приводит во вращение полуосевую шестерню 28, жестко связанную с ней полось 7 и движитель 10 левого борта. Полуосевая шестерня 6 диф- 5 ференцпала 1 и жестко связанная с ней вал-шестерня 27 приводят во вращение по- луосезую шестерню 29, свободно установленную на полуоси 8. Зубья 22 шестерни 29, езаимодействуя с зубьями 23 подвижно- 0 го элемента 12, приводят его во вращение. Так как подвижный элемент 12 посредством шлицевого соединения 25-14 связан с полуосью 8 движитель 10 правого борта вращается синхронно с полуосевой шес- 5 терней 29. Дроссели 17 и 32 полностью открыты, тормозной момент на валах гидромашин 16 и 30 отсутствует. В первом режиме движения крутящий момент, подводимый к корпусу 2 дифференциала 1, делится между движителями 10 поровну, а
его величина определяется наименьшим моментом сопротивления качению одного из них.
2.Режим сблокированного привода движителей.
Управляющий механизм 11 переводится в позицию II. В ведущем мосту по фиг,1 вращение от полуосевой шестерни 5 через зубья 22 и 23 передается на подвижный элемент 12 и далее через шлицы 13 и 14 на полуось 8. Через зубья 22 и 24 вращение от полуосевой шестерни 6 передается одновременно на полуось 7, В результате движители 10 правого и левого бортов заблокированы,
В ведущем мосту по фиг.2 шлицы 25 подвижного элемента 12 зацепляются одновременно со шлицами 14 полуоси 8 и шлицами 24 полуоси 7, т.е. они заблокированы. Зубья 23 подвижного элемента 12 при этом зацепляются с зубьями 22 полуосевой шестерни 29. Дроссели 17 и 32 полностью открыты, и давление в напорных магистралях 19 и 31 отсутствует. Крутящий момент на корпусе 2 дифференциала 1 определяется суммой моментов на обеих движителях 10, которые в общем случае не равны.
3.Режим ходоуменьшения.
Для получения рассматриваемого режима водитель переключаетуправляющий механизм 11 в позицию ill.
Вращение от корпуса 2 дифференциала 1 передается на сателлиты 4. которые воздействуют на полуосевые шестерни 5 и б. Полуосевая шестерня 5 через полуось 7 связана с движителем 10 левого борта и одновременно посредством зубьев 24 и 25 связана с подвижным элементом 12, через шлицы 13 и 14 (фиг,1), либо шлицы 25 м 14 (фиг.2) с полуосью 8 v движителем 10 правого борта, В результате на полуосевой шестерне 5, которая является ведущей в устройстве, возникает момент сопротивления со стороны движителей 10:
М ТЖ 5Г-™
где Мсопр. - момент сопротивления на ведущей полуосевой шестерне 5 со стороны движителей 10;
FK - сила сопротивления качению движителей 10;
гк - радиус качения движителей 10;
УБП - передаточное отношение между полуосевой шестерней 5 дифференциала 1 и движителями 10 (в устройстве по фиг.1 - это передаточное отношение бортевой передачи 9, в устройстве по фиг.2 - конечных передач, состоящих из звеньев 26-28 и 27-28);
т/БП - КПД упомянутой передачи.
Полуосевая шестерня 6 отсоединена от полуоси 8 и кинематически связана г взлог насоса 16 гидротормоза 15. В результате нз нее действует тормозной момент со стороны насоса 16:
РНfr,
тормо . . , i------,(Ј)
Јп UPT J/rr Т/мех
где Мторм - тормозной момент на управляю- 0 щей полуосевой шестерне 6 со стороны гидротормоза 15;
VH - рабочий объем насоса 16; . Рн - давление в напорной магистрали 19;
5 игт - передаточное отношение редуктора гидротормоза 15 ( в устройстве по фиг.1 - это зубчатая передача 20-215 в устройстве по фиг.2 Un 1, так как насос 16 связан с полуосевой шестерней б без промежуточ- 0 ной передачи);.
- механический КПД насоса 16; т/гт - КПД редуктора гидротормоза 15. Движение транспортного средства аоз5
0
можно при условии, когда тормозной момент Мторм на управляющей полуосевой шестерне 6 будет равен моменту сопротивления Мсопр со стороны движителей 10 на аедущей полуосевой шестерне 5. В начальный момент регулирования пониженной скорости дроссель 17 гидротормоза 15 полностью открыт. При этом жидкость, поступающая в напорную магистраль 19 от насоса 16, беспрепятственно проходит через дрос- сель 17 в гидробчк 18 и давление Рн в магистрали 19 отсутствует. Тормозной момент Мторм на полуосевой шестерне 6 практически равен нулю:
Мторм 0.
0 Так как. в дифференциальном механизме моменты на полуосевых шестернях 5 и 6 всегда равны (за исключением случая, когда механизм заблокирован), то ведущий момент МВед на шестерке 5 со стороны
5 сателлитов 4 равен нулю. Управляющая полуосевая шестерня 6 при этом врзща- атся с максимальной частотой, равной удвоенной частоте вращения корпуса 7. дифференциала 1, а ведущая полуосевая
0 шестерни 5 неподвижна и скорость транспортного средства равна нулю.
Для начала движения водитель плавно перекрывает дроссель 17. Давление Рн в напорной магистрали 19 гидротормоза 15
5 возрастает и на управляющей полуосевой шестерне 6 появляется тормозной момент Мторм, а на ведущей полуосевой шестерне 5 возникает момент МВед Мторм. Одновременно возрастает давление в напорной
магистрали 31 гидромашины 30 , ьа ее выходном валу возникает ведущий момент Мвед., направленный в ту же сторону, что и ведущий момент Мвед на полуосевой шестерне 5 со стороны сателлитов 4 и равный:
.. VfM РН/о
Мве - 2 П 7/мех W
где Vrn - рабочий объем гидромшины 30.
Дроссель 32 на первом этапе регулирования скорости полностью открыт, а обрат- ный клапан 34 препяствует перетеканию рабочей жидкости из напорных магистралей 19 и 31 в гидробак 18.
Таким образом, на ведущей полуосевой шестерне 5 дифференциала 1 в режиме хо- доуменыиения возникают три крутящих момента: момент сопротивления МСопр со стороны движителей 10, ведущий момент Мвед со стороны сателлитов 4 (равный тормозному моменту Мторм на шестерне б) и дополнительный ведущий момент Мвед со стороны гидромашины 30. До тех пор, пока выполняется неравенство
Мсопр Мвед + Мвед ,(4)
уменьшение проходного отверстия дроссе- ля 17 сопровождается увеличением давления РН в напорных магистралях 19 и 31, а скорость движения транспортного средства равна нулю. Движение начинается при условии
М
сопр
Мвед + М
вед
или, с учетом (1) - (3):
FK ГкРН
УБП /БП 2 П Т/мех
(5)
( Угт
VH
Пп
+ vr
(6)
При дальнейшем перекрытии дросселя 17 давление Рн остается постоянным, при этом расход рабочей жидкости через дроссель 17 уменьшается, что сопровождается плавным уменьшением частоты вращения управляющей полуосевой шестерни 6 и пропорциональным увеличением частоты вращения ведущей полуосевой шестерни 5 и скорости v транспортного средства,
Выражение баланса мощности на дифференциале следующее:
Ркорп Рупр. + Рвед j(7)
где Ркорп - мощность, подводимая к корпусу 2 дифференциала 1;
Рупр - мощность, подводимая к управляющей полуосевой шестерне 6;
Рвед-мощность, подводимая к ведущей полуосевой шестерне 5.
VH Рм ПН-
(о)
Рупр J/мех /гт 6 104
где пн - частота вращения вала насоса 16;
р FK ГК Пгм 2 П
вед ибп б ю4
VfM РН Пгм
О)
Т/мех 6 10Ч
где Пгм - частота вращения полуосевой шестерни 5 и вала гидромашины 30.
Второй член в выражении (9) предстае- ляет собой мощность РВед. подводимую дополнительно к полуосевой шестерне 5 со стороны гидромашины 30. При полностью закрытом дросселе 17 частота вращения управляющей полуосевой шестерни 6 и вала насоса 16 минимальны для первого поддиапазона регулирования и определяются дву- мя факторами - соотношением рабочих объемов Уч и /гм гидромашин 16 и 30 соответственно и передаточным числом редуктора гицротопмоза 15;
15 0
5 0
5
0 5
0
5
Луш
Пвштт
Ун
т/обн. ;0б.гм , (Ю)
VrM Urr
где Пвш Пгм - частота вращения шестерни 5;
г,;ш пиигт - частота вращения шестерни 6;
-/об.н, об.гм - объемные КПД насоса 16 и гидромашины 30 соответственно.
Учитывая,что
Пвш Ь Пуш Пкор -2
выражение (10) запишется в виде
2пКор
Пвш 1 +
Vr
Ur
(11)
/н ЩоЬ н Т/об.гм
где Пкор - частота вращения корпуса 2 дифференциала 1.
Комбинируя разтичныезначения VH, Угм и Urr, можно получить различную скорость движения транспортного средства в конце первого поддиапазона регулирования и соответственно различную величину потерь мощности в ведущем мосту.
Так, например, если в устройстве по фиг.1 рабочие объемы VH и VrM равны, а передаточное от ношение Un зубчатой передачи 20-21 равно 1/3, то частота вращения Пуш управляющей полуосевой шестерни 6 в конце первого поддиапазона регулирования скорости будет составлять величину
Пуш Пвш/3 /обн /об.гм- ПРИ ЭТОМ ЧЭСТОТЗ
вращения шестерни 5 пвш 1,5 Пкор. Скорость движения транспортного средства в конце первого поддиапазона будет в 1,5 раза больше скорости, которую имело бы транспортное средство при движении в позициях и I управляющего механизма 11 на соответствующей передаче в коробке передач. При этом максимальные потери мощности (з момент начала движения) будут меньше приблизительно на 30% по сравнению с ведущим мостом по основному изобретению.
В устройстве no фиг.2 при равенстве рабочих объемов Vh и /Гм и при Un 1, при полностью закрытом дросселе 17 частота вращения пуш шестерни 6 будет несколько выше часто ы вращения п корпуса 2 дифференциала 1, а частота вращения пвш соответственно несколько ниже упомянутой частоты вращения.
Таким образом, в устройстве по фиг.2 скорость транспортного средства и конце первого поддиапазона регулирования будет несколько меньше скорости vi, VH, VIM и т.д., на которых двигалось бы транспортное средство на первой, второй, третьей и т.д. передачах в коробке передач в первой и втором режимах работы ведущего мое га. Максимальные потери мощности в этом случае будут снижены приблизительно на 50%.
Перераспределение мощности между звеньями механизма в перром подцнапазо- не регулирования происходит следующим образом (фиг.З): по мере закрытия дросселя 17 вначале нелинейно возрастают MOLI.HO- сти Ркорп и Рупр, а транспортное средство неподвижно (Рвед 0-ц V 0). Изменение Ркорп и Рупр при неподвижном транспо рт- ном средстве показано на фиг 3 ШТОИУСВЫ- мм линиями.
После начала движения по мере пнэз- крытия дросселя 17 мощность Рупрлимзйно уменьшается до вемичмны, определяемо объемными утечками ч гидрома инах i5 и 30 (7об н. и /об гм) по ; полное ь;о з дросселе 1/. Мощ.юсть Рвод линейно возрастает, а мощности остается пос о- чнной до полного закрытия дросселя 17. Скорость дви,кенш транспортного средства v такхе линейно возрастает до ьеличи ны, определяемой с использованием выражения (11)
Графики на сЬпг З построены веду щего ног га по Фиг I у которого v, /Гм и Urr 1. Кривые, помеченные мндзкьом построены для 1-й i ередачи в КП, индексом 2 -для 11-й передачи и индексом 3 - для i1.- передачи. Тонкой штрихпунктирной линией показаны графики изменения мощности и Рупр в зависимости от степе -ч закрытия дросселя гидротормоза в устройстве по основному изобретению.
В начале втооо о поддиапазона ре у- лирования сопротивление поток5 жидко сти, поступающей от несоса 15 к гидромашине 30, отсутствует (дроссель 32 полностью открыт) и давление Рн пэред дросселем 32 и за нип одинаково. Для уве- Л/-ЧЗНИР скорости лвижен /н v вст,/1тель пз- чикает плавне перекрывать дросселэ 3J
При этом возрастает сопротивление потоку жидкости на дросселе 32 и возникает перепад давления в гидромагистралях 19 нэсоса 16 и 31 гидромашины 30,
Тормозной момент Мторм на прав/ясщей полуосевой шестерне 6 увели /.вйб-ся, а ведущий момент Мвед со стороиь гидромашины 30 уменьшается. При этом сумма рассматриваемых моментов остается посто0 янной, т.е. остается справедливым соотношение (5). По мере перекрытия дросселя 32 давление в напорной магистрали 19 повышается до величины, которая имела бы месте в напорной магистрали гидротормогз по
5 основному изобретению, при равной тяговой нагрузке на движителях 10. Одновременно давление с напорной магистрали 3 I гидромашкны 30 снижается до атмосферного и составляющая баланса мощности
П Мвед в выражении (5) обращается в нуль Выражение (5) принимает вид
Мсопр - Мвед .(12)
Таким образом, гидромашина ЗС выключается из энергетического оаланса ус5 гаойстза -л оно становится идентичным устройству по основному изобретению, а именно: насос Q работает ч торгюзном режиме дроссель 32 выполняет функцию дросселя гидротормоза, ведущий момент
и нашесгэрнеб возникает только со стороны сателлитов 4
В рассмотренный промежуток регулирования дросселя 32 скорость v тра;.спорт- ноге средства постоянна и ревна скорости
5 е конце первого поддиапазона регулирования дросселя 17. Мощность Рупр нелинейно взрастает до величины, которач ноцводит- ;я к упрсчвляшщей полуосенсй шестерне едущего MOGIU по огки зном1 ньобрете0 нию при чой же тяговой нагрузке и сксоссти движения.
Moui,HOCib Рвед, подводимая к ведущей мо,1уосеыой шестерне 5, остаемся постоям ной, а мощность Ркорп на корпусе 2 дифсре5 ренциала 1 нелинейно возрастает (фиг.З). После достижения давления в напорной магистрали 19 /помянутой величины, дальнейшее перекрытие дроссели 32 сопровождается снижением частоты враще0 имя вала насоса 15 и полуосевой шестерни 6 Частота вращения полуосевой шестерни 5, вала насоса 30 л скорость v движения транспортного средства возрастают Так как ори этом количество оабочей жидкости,
6 нагнетаемое насосом 16 через дроссель 32 к гидромашине 30 становится меньшим количества рабочей жидкости, всасыраемой последней из магистрали 31, открывается обратный клапан 34. Недостаток рабочей л едкости через магистраль 33 мз бака 18
поступает к входу гидромашины 30, и она вхолостую перекачивает рабочую жидкость в гидробак 18. Дальнейшее увеличение скорости v происходит при постоянном давлении Рн в напорной магистрали 19 насоса 16. По мере закрытия дросселя 32 мощность Рупр линейно уменьшается, мощность Рвед линейно возрастает, а мощность Ркорп остается постоянной.
При полностью закрытом дросселе 32 частота вращения пн вала насоса 16 минимальна и определяется только объемными утечками, а частота вращения пгм и пвш максимальна и приблизительно равна удвоенной частоте вращения пКор корпуса 2 дифференциала 1. Описанный порядок работы устройства справедлив для любой передачи в коробке передач, при этом количество диапазонов .регулирования скорости определяется количеством1 пере- дач в КП.
На графиках баланса мощности (фиг.4) площадь, ограниченная прямыми РУпр1 и Рупр 2 с одной стороны и осью v с другой, характеризует количество энергии, подво- димой к управляющей полуосевой шестерне 6 предлагаемого устройства в первом и втором поддиапазонах регулиоования скорости v, т.е. энергии, затрачиваемой на утечки и дросселирование рабочей жидко- сти. Указанная площадь заштрихована вертикальной чертой. Потери энергии в устройстве с дополнительной гидромашиной на выходе дифференциального механизма снижены по сравнению с устройством, содержащим один гидротормоз, на величину, которая характеризуется площадью, заштрихованной горизонтальной чертой.
Из графиков по фиг.4, построенных для ведущего моста по фиг.2 (VH V™ и 1)п - 1) следует, что мощность,под8одимая к корпусу 2 дифференциала 1 РКор1 в первом поддиапазоне снижена приблизительно в два раза, при этом величина мощности Рвед, подводимой к движителям 10, не изменилась в сравнении с ведущим мостом по основному изобретению.
Во втором .поддиапазоне регулирова- ния скорости v абсолютные значения и характер изменения мощностей РКор 2, Рвед и Рупр 2 в предлагаемом устройстве такие же, как и в известном.
При увеличении силы сопротивления надвижителях Ютранспортногосредства, движущегося с заданной пониженной ско- ростью, возрастает момент сопротивления Мсопр на ведущей полуосевой шестерне 5. Так как движение на пониженных скоростях возможно только при выполнении условия(5),увеличиваются веду щие моменты МВед и Мвед. Происходит это следующим образом.
Пр увеличении Мсопр частота вращения полуосевой шестерни 6 и вала насос 16 пропорционально увеличивается. При этом количество рабочей жидкости, нагнетаемое насосом 16 в гидролинии 19 и 31, увеличивается, а количество рабочей жидкости, потребляемое гидромашиной 30, уменьшается. При движении в первом под- .диапазоне регулирования расход на дросселе 17 и давление в гидролиниях 19 и 31 возрастают. На полуосевой шестерне 6 увеличивается тормозной момент Мторм, а на шестерне 5 - ведущий момент Мвед. Транспортное средство продолжает движение с меньшей скоростью, соответствующей позь шенной силе сопротивления на движителях 10. При движении во втором поддиапазоне возрастает расход на дросселе 32 и тормозной момент Мторм на шестерне 6. Скорость движения снижается в большей степени, чем в аналогичной ситуации при движении в первом поддиапазоне. Наиболее стабильную скорость движения в режиме ходоуменьшения можно получить в конце первого поддиапазона (дроссель 17 полностью закрыт), либо во втором поддиапазоне при той же скорости движения (гори- зонгальныэ у астки на графиках скорости по фиг.З).
В том случае гидролинии 19 и 31 отсоединены от баке 18, а между гидромашинами 16 и 30 установлена гидравлическая связь, допускающая лишь незначительное рассогласование частот вращения их валов, приче г указанное рассогласование возникает только из-за объемных утечек в гидро- машинах. Для увеличения скорости движения необходимо -закрывать дроссель 17 (первый поддиапазон), или дроссель 32 (второй поддиапазон).
Соответственно при уменьшении силы сопротивления на движителях 10 скорость движения возрастает и для ее уменьшения необходимо открывать дроссель 17 или 32. Это создает неудобства в управлении транспортным средством и снижает качество некоторых технологических операций, требующих постоянной пониженной скорости.
Для кратковременной стабилизации пониженной скорости на транспортном средстве с ведущим мостом по фиг.2 можно использовать главные тормоза 35 и 36, закрепленные на. валах-шестернях 26 и 27, Осуществляется это следующим образом.
При кратковременном увеличении тяго- зой нагрузки на движителях Ю водитель
подтормаживает главный тормоз 36, в результате чего увеличивается тормозной момент Мторм на управляющей полуосевой шестерне 6 без увеличения частоты ее вращения и давления перед дросселем 17. Таким образом, скорость движения транспортного средства не изменяется. При уменьшении тяговой нагрузки на движителях 10, момент сопротивления Мсопр на полуосевой шестерне 5 снижается. В этом случае водитель подтормаживает главный тормоз 35, увеличивая тем самым Мсопр до прежней величины и сохраняя неизменной скорость движения.
Таким образом, использование главных тормозов ведущего моста для стабилизации скорости упрощает управление транспортным средством, так как отпадает необходимость в частом подрегулировании дросселей 17 и 32
Соединение ведущей полуосевой шестерни, либо связанной с ней полуоси с дополнительной гидромашиной, напорная магистраль которой снабжена регулируемым дросселем, подключена к напорной магистрали гидротормоза между его насосом и дросселем и связана с гидробаком посредством дополнительной гидролнии с обратным клапаном, подключенной между дополнительной гидромашиной и ее дросселем, а такх:е установка обратного клапана с проводимостью в сторону дополнительной гидромашины, позволяют повысить экономичность работы ведущего моста в режиме ходоуменьшения за счет того, что момент сопротивления со
стороны движителей уменьшается на величину момента, возникающего на валу дополнительной гидромашины, этом уменьшается величина рабочего
давления в гидросистеме ведущего моста, снижаются потери энергии на дросселирование и утечки рабочей жидкос .и при сохранении величины диапазона регулирования скорости.
Кроме того, ведущий мост с дополнительной гидромашиной, связанной с выходным звеном дифференциала, менее чувствителен к изменениям нагрузки на движителях, что обеспечивает транспортному средству более стабильную скорость в пониженном диапазоне.
Формула изобретения Ведущий мост транспортного средства
по авт.св. Ns 1586928, обличающийся тем, что, с целью повышения экономичности при работе в режиме ходоуменьшения путем снижения потерь на дросселирование рабочей жидкости, он снабжен дополнительной гидромашиной, кинематически связанной со второй полуосью и напорная магистраль которой снабжена регулируемым дросселем, подключена к напорной магистрали гидротормоза между его гидронасосом и дросселем и связана с гидробаком посредством дополнительной гидролинии с обратным клапаном, подключенной между дополнительной гидромашиной и ее дросселем, при этом
обратный клапан установлен г проводимостью в сторону дополнительной гид- ромашины.


| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Ведущий мост транспортного средства | 1990 |
|
SU1701578A2 |
| Ведущий мост транспортного средства | 1989 |
|
SU1703519A2 |
| Ходоуменьшитель для самоходной машины | 1972 |
|
SU482334A1 |
| Трансмиссия транспортного средства | 1988 |
|
SU1539116A1 |
| Ходоуменьшитель транспортного средства | 1980 |
|
SU925688A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЛОКИРОВКОЙ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2169871C2 |
| Самоблокирующийся дифференциал с гидравлическим сопротивлением | 1975 |
|
SU1096136A1 |
| Транспортное средство | 1982 |
|
SU1092061A1 |
| Привод ведущего моста прицепа | 1990 |
|
SU1736819A1 |

Изобретение относится к транспортному машиностроению, в частности к трансмиссиям транспортных средств с ходоуменьи ителями. Цель изобретения - повышение экономичности. Ведущий мост содержит межколесный дифференциал 1, в корпусе 2 которого размещены полуосевые шестерни 5 и 6, связанные с полуосями 7 и 8. На полуоси 3 установлен подвижный элемент 12, кинематически связанный с трех- позиционнь м управляющим механизмом 11. С шестерней 6 кинематически связан насос 18 гидротормоза 15. 8 напорной магистрали 19 насоса 16 установлен регулируемый дог.ссель 17, подключенный к гидробйку 18, Режим ходоуменьшения устанавливается при переключении управляющего механизма 11 в третью позицию. При
10 7 я ЧгШРл м ° 1Л1 )/
закрыт
дроссель 1-го поддио -дроссель поддиапазонапвзона
Фиг. 3
закрыт
$корЈ
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| ,(54) ВЕДУЩИЙ МОСТ ТРмНСПОРТНОГО СРЕДСТВА | |||
