Изобретение относится к медицинской .технике, а именно к устройствам для обеспечения дозированной нагрузки на конечно-. сти; при реабилитационных либо профилактических тренировках.
Целью изобретения является обеспечение еозможности индивидуального дозиро- вания нагрузки на различные группы мышц конечностей путем изменения формы и ориентации траектории их движения при тренировках.
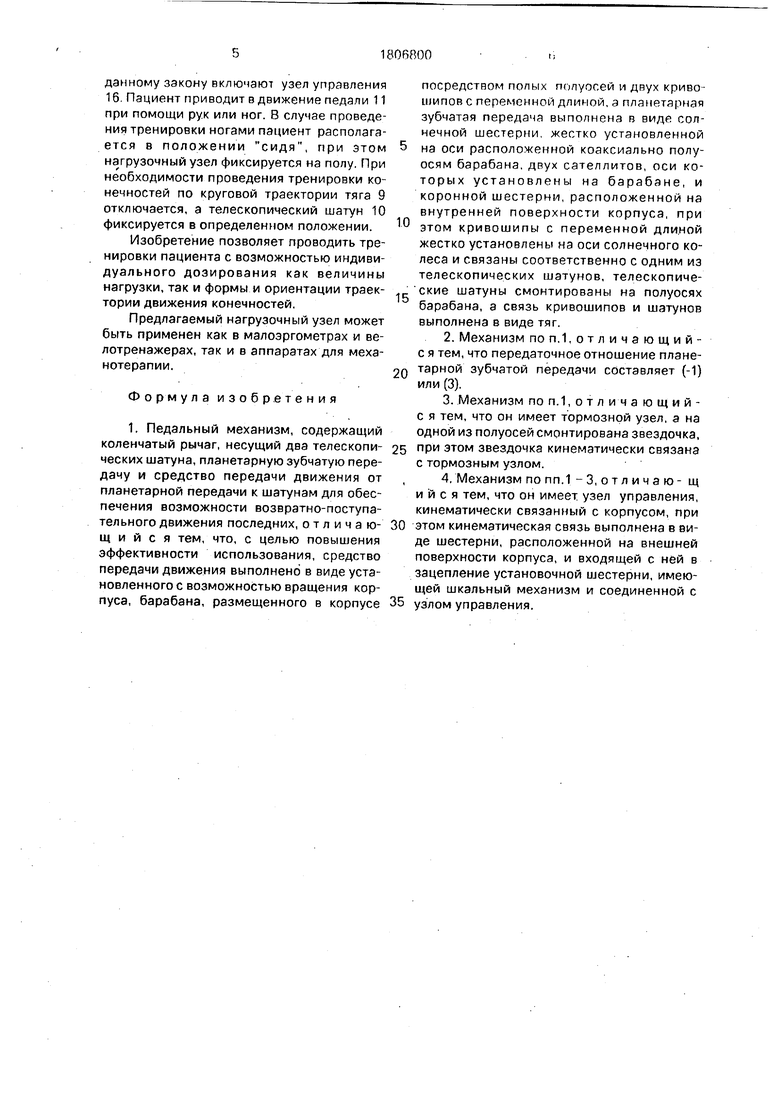
На-фиг. 1 предоставлена схема педального механизма; на фиг,2 -схема для расчета траектории; на фиг.З - варианты ориентации и формы траектории движения педалей.
Педальный механизм содержит подвижный корпус 1, установленный на полой оси 2 барабана 3, в котором закреплены оси 4 сателлитов 5, входящих в зацепление с солнечной шестерней 6, закрепленной на оси 7,
установленной коаксиально с полой осью 2. На оси 7 закреплены кривошипы 8 переменной длины, соединенные тягами 9 с телескопическими шатунами 10, снабженными педалями 11. Телескопические шатуны 10 закреплены на полой оси 12. Коронная шестерня 13, выполненная на внутренней поверхности корпуса 1, входит в зацепление с сателлитами 5, На наружной поверхности корпуса 1 выполнена шестерня 14, входящая в зацепление с установочной шестерней 15, кинематически соединенной с узлом управления 16 и снабженной рукояткой 17 со шкальным механизмом 18. На полой оси 2 закреплена ведущая звездочка 19, кинематически соединенная с тормозным узлом 20.
Педальный механизм работает следующим образом.
При вращейии педалей 11 ногами либо руками длина телескопического шатуна 1Р
00
о
сь
СО
о о
будет изменяться за счет вращения кривошипа 8 переменной длины с тягой 9. Планетарная зубчатая передача, состоящая из барабана 3 с сателлитами 4, солнечной 6 и коронарной 13 шестерен, выполнена таким образом, что ее передаточное отношение может принимать только два значения: -1 и +3. Только при указанных значениях передаточного отношения траектории движения педалей будут представлять собой замкнутые кривые - овалы.
Используя фиг.2 простыми тригонометрическими преобразованиями можно получить формулу, определяющую овальную траекторию движения педалей, следующим образом:.: .
При малом А примерно равен
(7)
Cos/3«1 - (1 -Co$2 p . (8)
Тогда
10
Sn-r ( 1 -Cos ) 1
(9)
15
В полярных координатах S4 будет выражено в виде

| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ЛЕГКОВОЙ ВЕЛОМОБИЛЬ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ МУСКУЛЬНОЙ СИЛОЙ НОГ, СПИНЫ, РУК, ВЕСОМ ВОДИТЕЛЯ И ГРУЗА | 1996 |
|
RU2124450C1 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ПЕДАЛЬНЫЙ ПРИВОД (ВАРИАНТЫ) | 2010 |
|
RU2421366C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| УСТРОЙСТВО ТРАНСЛЯЦИИ МУСКУЛЬНЫХ УСИЛИЙ ЧЕЛОВЕКА НА ОБОД ВЕДУЩЕГО КОЛЕСА ДОРОЖНО-ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739642C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |

Использование изобретения: в устройствах для обеспечения дозированной нагрузки на конечности человека при реабилитационных или профилактических трЪж/фовках. Сущность изобретения: педальный механизм содержит полый корпус. Корпус установлен на полуосях барабана. В барабане закреплены оси сателлитов солнечной шестерни. Солнечная шестерня установлена по оси коаксиальной полуосям барабана. На оси солнечной шестерни закреплены кривошипы переменной длины, которые связаны посредством тяг с телескопическими шатунами с педалями. Телескопические шатуны закреплены на полуосях. На внутренней поверхности корпуса имеется коронная шестерня для сателлитов. 3 з.п. ф-яы,-3 ил.
)1 t; . t
CD (2)
где а - угловая скорость вращения кривошипа 8;
«г - угловая скорость вращения телескопического шатуна 10:
t - текущее время..
Обозначим передаточное отношение планетарной зубчатой передачи через
(3)
и соотношение длины кривошипа к длине тяги через
Л А-, (4)
Подставляя значение I 1 в (3), (2), можно преобразовать
-а t -а- (5) р - 2 а.(6)
Используя тригонометрические преобразования, длину телескопического шатуна 10 можно выразить в прямоугольных координатах
(1 + J) -rx X -Cosip+2 (1 -Cos/) 1 r rCosp+ Cos/ .. (7) 1
р г cos2 а - Sin2 а + j|l - 2 Я2 (cos2 а - Cos4 а) +
20
(10)
5
0
5
5
0
5
Формула (10) представляет.собой уравнение движения педалей 11 по овальной траектории. С Изменением параметров г, А и m можно задавать требуемую форму траектории движения педалей (фиг.З).
Аналогично можно получить уравнение движения педалей 11 для передаточного отношения планетарной передачи, равного -КЗ. ,. ; . . :
Таким образом, для изменения формы овальных траекторий движения конечностей, приводящих в движение педали 11, достаточно изменить длину кривошипа 8 либо расстояние от оси тяги 9 до педали 11. Для изменения положения осей овальной траектории движения педалей 11 достаточ- Q но изменить начальный угол «о (фиг.З), поворачивая корпус 1 при помощи рукоятки 17 по шкальному механизму 18 до фиксированного положения, либо по заданному закону при помощи узла управления 16. Узел управления может быть выполнен, например, в виде маломощного низкооборотного электродвигателя, управляемого программируемым таймером.
В зависимости от вида тренируемых групп мышц конечностей предварительно устанавливают длину кривошипа 8, положение корпуса 1 при помощи рукоятки 17 по шкальному механизму 18 и величину нагрузки тормозным узлом 19. Тормозной узел может быть выполнен в виде набора фрикционных дисков с нормированным значением тормозного момента и с возможностью его регулировки. При необходимости изменения конфигурации траектории по заданному закону включают узел управления 16. Пациент приводит в движение педали 11 при помощи рук или ног. В случае проведения тренировки ногами пациент располагается в положении сидя, при этом нагрузочный узел фиксируется на полу. При необходимости проведения тренировки конечностей по круговой траектории тяга 9 отключается, а телескопический шатун 10 фиксируется в определенном положении.
Изобретение позволяет проводить тренировки пациента с возможностью индивидуального дозирования как величины нагрузки, так и формы и ориентации траектории движения конечностей.
Предлагаемый нагрузочный узел может быть применен как в малоэргометрах и ве- лотренажерах, так и в аппаратах для механотерапии.
Формула изобретения
посредством полых полуосей и двух кривошипов с переменной длиной, а планетарная зубчатая передача выполнена в виде солнечной шестерни, жестко установленной
на оси расположенной коаксиально полуосям барабана, двух сателлитов, оси которых установлены на барабане, и коронной шестерни, расположенной на внутренней поверхности корпуса, при
этом кривошипы с переменной длиной жестко установлены на оси солнечного колеса и связаны соответственно с одним из телескопических шатунов, телескопические шатуны смонтированы на полуосях барабана, а связь кривошипов и шатунов выполнена в виде тяг.
одной из полуосей смонтирована звездочка,
при этом звездочка кинематически связана
с тормозным узлом.
этом кинематическая связь выполнена в виде шестерни, расположенной на внешней поверхности корпуса, и входящей с ней в зацепление установочной шестерни, имеющей шкэльный механизм и соединенной с
узлом управления.
Фиг-j
Фиг. 2.
| Патент США №4125235, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| : х. | |||
| ;---;-х; | |||
| -; | |||
