Изобретение относится к устройствам для приведения в действие транспортных средств мускульной энергией человека, в том числе к велосипедам, для людей с проблемами в коленных суставах и опорно-двигательном аппарате.
Для первого варианта известен аналог - педальный привод в описании изобретения к патенту РФ №2068364, 6 МПК В62М 1/02, от 19.05.1992, опубл. 27.10.1996, содержащий ведущую звездочку, жестко закрепленную на валу каретки, связанную при помощи цепного привода с ведомой звездочкой, сопрягаемой с ведущим колесом, первую ступень привода, выполненную из двух планетарных механизмов, имеющих водила и жестко соединенных с валом каретки, со свободно установленными на выступающих концах сателлитами, зацепленными с передаточным отношением, равным единице, с солнечными зубчатыми звеньями, установленными концентрично валу каретки с двух боковых сторон и неподвижно относительно корпуса транспортного средства, и педали, установленные на задних концах горизонтальных рычагов, жестко опирающихся передними концами на оси сателлитов. На передних концах горизонтальных рычагов над точкой соединения их с сателлитами установлены тормозные подушки. Каждая планетарная передача состоит из конической солнечной шестерни и конического сателлита, которые соединены между собой при помощи промежуточного валика с жестко насаженными коническими шестернями на концах, свободно опирающихся на водило.
Недостатки: недостаточно высокая тяговая способность педального привода из-за ограниченного сектора совпадения направления движения педали и вектора мышечных усилий ноги, большой угол сгибания коленей, что препятствует цикличности вращения педалей, приводит к увеличению мышечных усилий и повышению физической нагрузки на коленные суставы.
Размещение педалей на задних концах горизонтальных рычагов, жестко опирающихся передними концами на оси сателлитов, приведет к тому, что горизонтально смещенная назад, на длину указанных рычагов траектория движения педалей потребует увеличенного сгибания коленей в заднем и верхнем участке траектории, что не позволит в верхнем участке приложить мышечные усилия по касательной к траектории педалей и вызовет, в свою очередь, естественное появление радиальной составляющей мышечных усилий, которая, в данной конструкции, создаст крутящий момент, противоположный направлению вращения вала каретки, то есть явление «мертвых» точек увеличится до участка «мертвой» зоны. Все это препятствует цикличности вращения педалей, снижает тяговую способность педального привода и приводит к повышенным физическим нагрузкам на коленные суставы.
Для второго варианта известен аналог - устройство для педального привода в описании изобретения к патенту Германии № DE 29918657 (U1) МПК-7: В62М 3/06; В62М 1/02; В62М 9/06; дата публикации 06.07.2000, содержащее первый рычаг, соединенный первым концом с вращающимся валом каретки, второй рычаг, первым концом шарнирно соединенный со вторым концом первого рычага, на втором конце которого установлена педаль.
Недостатки: недостаточно высокая тяговая способность педального привода из за уменьшения длины траектории движения педалей и отсутствия цикличности вращения педалей, а также увеличение мышечных усилий и повышение физической нагрузки на коленные суставы.
Угол между вторым рычагом с педалью и первым рычагом, который жестко соединен с валом каретки, определяется цепной передачей, натяжение в которой осуществляется пружиной, это естественно не может обеспечить жесткую механическую связь между положением педали и валом каретки, что приведет к нарушению траектории движения педалей. Кроме этого, эллипсная траектория движения педалей формируется за счет наклона вторых рычагов во внутрь, относительно круговой траектории оси соединения первого рычага со вторым, то есть ее длина меньше длины окружности стандартного педального привода, а это потребует увеличения мышечных усилий, при этом в нижней половине траектории педаль должна занять положение выше шарнирного соединения первого рычага со вторым, за счет натяжения цепи пружинной, то есть вектор движения педали направлен навстречу мышечным усилиям, что конструктивно не может обеспечить строго закономерное и стабильное положение второго рычага с педалью и делает невозможным прохождение «мертвых» точек.
В результате нарушается цикличность вращения педалей, возникает необходимость приложения дополнительных мышечных усилий, снижается тяговая способность педального привода и создается повышенная физическая нагрузка на коленные суставы.
Для первого и второго вариантов известен наиболее близкий аналог - педальный привод в описании изобретения к патенту РФ №2421366 C1 МПК В62М 3/04, В62М 3/06, от 16.03.2010, опубл. 20.06.2011, который выполнен в виде планетарного механизма и содержит водило, первым концом соединенное с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, стационарное колесо с передаточным числом 2:1 по отношению к колесу-сателлиту, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом посредством цепной или ременной передачи, при этом второй конец водила шарнирно соединен с колесом-сателлитом. Шарнирное соединение водила с колесом-сателлитом выполнено в точке, смещенной от центра последнего, а стационарной шестерне придана форма, отличная от круговой.
Педальный привод, выполненный в виде планетарного механизма и содержащий водило, соединенное первым концом с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, которое шарнирно соединено со вторым концом водила, и стационарное колесо, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом посредством зубчатой передачи с нечетным числом промежуточных ведущих зубчатых колес, например одним. В него введены промежуточное ведущее зубчатое колесо и дополнительное ведомое зубчатое колесо, жестко связанные между собой, колесо-сателлит и промежуточное ведущее зубчатое колесо выполнены с возможностью вращения концентрично осям, перпендикулярным продольной оси водила, промежуточная ведомая шестерня установлена эксцентрично относительно оси вращения ведущей промежуточной шестерни с возможностью взаимодействия со стационарным колесом, установленным эксцентрично относительно вала каретки. Передаточные числа колеса-сателлита и промежуточного ведущего колеса, а также стационарного колеса и промежуточной ведомой шестерни выбраны из расчета 1:2 и 1:1 соответственно, а эксцентриситеты промежуточной ведомой шестерни и стационарного колеса выполнены равными. Длины водила W и рычага R выбраны из соотношения W≥R.
Недостатки: недостаточно высокая тяговая способность педального привода из-за отсутствия цикличности вращения педалей и очень большого угла сгибания коленей, приводящих к увеличению мышечных усилий и повышению физической нагрузки на коленные суставы.
Использование в приводе аналога передаточного числа 2 приводит к тому, что за один оборот водила с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, совершает два оборота относительно водила, при этом ось педали два раза меняет свое положение по вертикали относительно оси вращения колеса-сателлита, которое шарнирно установлено на водиле, то есть в районе «мертвых» точек овальная траектория движения оси педали два раза выходит за круговую траекторию, которую описывает ось колеса-сателлита с водилом, при этом происходит смена направления вектора движения педали на противоположное относительно направления вращения вала каретки, что нарушает координацию мышечных усилий и делает невозможным цикличное вращение педалей, а горизонтально ориентированный эксцентриситет стационарного колеса создает вертикальный размер овальной траектории движения педалей, равный 500-600 мм, который вызывает чрезмерный подъем коленей и создает изолированную нагрузку передних четырехглавых мышц бедра. В результате возникает необходимость увеличения мышечных усилий, необходимых для вращения педалей, при отсутствии цикличности вращения педалей, снижение тяговой способности педального привода и повышение физической нагрузки на коленные суставы.
Единый технический результат изобретения: повышение тяговой способности педального привода, получение стабильной цикличности вращения педалей, исключение явления «мертвых» точек, снижение физической нагрузки на коленные суставы.
Единый технический результат в педальном приводе (варианты), выполненном из двух планетарных механизмов, оппозитно размещенных на валу каретки, каждый из которых содержит водило, первым концом жестко соединенное с валом каретки, шатун с педалью, неподвижно связанный с зубчатым колесом-сателлитом, которое шарнирно соединено со вторым концом водила, и зубчатое стационарное колесо, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом механическими передачами, достигается за счет того, что в первом варианте в приводе используются некруглые зубчатые колесо-сателлит и стационарное колесо, установленные с эксцентриситетом, связанные двухступенчатой зубчатой передачей, с передаточным числом U=1, через промежуточное, некруглое, эксцентричное зубчатое колесо, шарнирно помещенное на водиле, причем в каждой ступени передачи зубчатые колеса имеют одинаковую форму, например эллиптическую, и одинаковый эксцентриситет, благодаря чему в каждой ступени передачи создается переменное передаточное отношение, которое за один оборот вала каретки принимает значения от I мин=D-e/D+e до I макс=D+e/D-е, где D - большой диаметр колес, а е - эксцентриситет, при этом изменение угла наклона шатуна к вертикали строго связано с углом поворота вала каретки, кроме того, эксцентричное промежуточное зубчатое колесо может быть блоком из двух эксцентричных зубчатых колес, а оси колеса-сателлита, промежуточного колеса и вала каретки лежат или не лежат на одной прямой.
Единый технический результат достигается за счет того, что во втором варианте установленные с эксцентриситетом зубчатые колесо-сателлит и стационарное колесо с передаточным числом U=1 связаны посредством цепной или ременной передачи и имеют одинаковую форму и одинаковый эксцентриситет, создающие переменное передаточное отношение в передаче, которое за один оборот вала каретки принимает значения от I мин=D-e/D+e до I макс=D+e/D-e, где D - большой диаметр колес и е - эксцентриситет, кроме этого, внутри или снаружи ветвей гибкой передачи добавлены регулирующие натяжные элементы, положение которых находится в строгой зависимости от угла поворота вала каретки, размещенные в фиксированных точках водила или на кронштейне, шарнирно установленном на водиле, причем поворот кронштейна осуществляется жесткой тягой под действием дополнительного рычага, неподвижно связанного с колесом-сателлитом, благодаря этому при вращении эксцентричного колеса-сателлита и вала каретки, вследствие определенного перемещения регулирующих натяжных элементов, закономерно изменяется длина обеих ветвей гибкой передачи, при этом в них поддерживается постоянное натяжение и происходит изменение угла наклона шатуна к вертикали в строгой зависимости от угла поворота вала каретки.
По первому варианту технический результат достигается за счет новых признаков благодаря тому, что в приводе используются некруглые, зубчатые колесо-сателлит и стационарное колесо, установленные с эксцентриситетом, связанные двухступенчатой зубчатой передачей, с передаточным числом U=1, через промежуточное, некруглое, эксцентричное зубчатое колесо, шарнирно помещенное на водиле, причем в каждой ступени передачи зубчатые колеса имеют одинаковую форму, например эллиптическую, и одинаковый эксцентриситет, благодаря чему в каждой ступени передачи создается переменное передаточное отношение, которое за один оборот вала каретки принимает значения от I мин=D-e/D+e до I макс=D+e/D-e, где D - большой диаметр колес, а е - эксцентриситет, при этом изменение угла наклона шатуна к вертикали строго связано с углом поворота вала каретки, кроме того, эксцентричное промежуточное, зубчатое колесо может быть блоком из двух эксцентричных зубчатых колес, а оси колеса-сателлита, промежуточного колеса и вала каретки лежат или не лежат на одной прямой.
При этом благодаря тому, что в предлагаемом приводе шатун ориентирован педалью вниз и передаточному числу, равному U=1, в обеих ступенях зубчатой передачи, ось педали всегда ниже оси вращения шатуна с колесом-сателлитом на водиле, а вектор движения педали постоянно имеет одинаковое направление с направлением вращения вала каретки, создаются условия для стабильного, цикличного вращения педалей. Кроме этого, за счет вертикальной ориентации эксцентриситета стационарного колеса и совпадения с ней ориентации эксцентриситета колеса-сателлита и промежуточного колеса в верхней зоне траектории педалей переменное передаточное отношение доходит до I=2:1 между колесом-сателлитом и стационарным колесом, это позволяет почти в два раза уменьшить мышечные усилия, необходимые для прохождения верхнего участка траектории, а также увеличить угловую скорость вращения шатуна с колесом-сателлитом относительно угловой скорости вращения вала каретки с водилом, за счет чего в передней зоне нажима, автоматически, происходит выдвижение шатуна с педалью вперед, что увеличивает плечо приложения мышечных усилий до суммарной длины шатуна и водила в нижней зоне траектории движения педалей. Причем ориентация шатуна педалью вниз позволяет уменьшить вертикальный размер траектории движения педалей до значений 220-280 мм, то есть сделать равным двойной длине водила, при значениях 340-350 мм в стандартных велосипедах. В результате этого заявляемое изобретение позволит значительно уменьшить мышечные усилия, затрачиваемые на вращение педалей и снизить физические нагрузки на коленные суставы.
По второму варианту технический результат достигается за счет новых признаков за счет того, что установленные с эксцентриситетом зубчатые колесо-сателлит и стационарное колесо с передаточным числом U=1 связаны посредством цепной или ременной передачи и имеют одинаковую форму и одинаковый эксцентриситет, создающие переменное передаточное отношение в передаче, которое за один оборот вала каретки принимает значения от I мин=D-e/D+e до I макс=D+e/D-e, где D - большой диаметр колес и е - эксцентриситет, кроме этого, внутри или снаружи ветвей гибкой передачи добавлены регулирующие натяжные элементы, положение которых находится в строгой зависимости от угла поворота вала каретки, размещенные в фиксированных точках водила, или на кронштейне, шарнирно установленном на водиле, причем поворот кронштейна осуществляется жесткой тягой под действием дополнительного рычага, неподвижно связанного с колесом-сателлитом, благодаря этому при вращении эксцентричного колеса-сателлита и вала каретки вследствие определенного перемещения регулирующих натяжных элементов закономерно изменяется длина обеих ветвей гибкой передачи, при этом в них поддерживается постоянное натяжение и происходит изменение угла наклона шатуна к вертикали в строгой зависимости от угла поворота вала каретки.
Причем в верхней зоне траектории движения педалей за счет эксцентриситета зубчатых колес и благодаря работе регулирующих натяжных элементов происходит такое перераспределение длин ветвей гибкой передачи, которое приводит к увеличению угловой скорости вращения колеса-сателлита относительно угловой скорости вращения вала каретки с водилом. В результате переменное передаточное отношение колеса-сателлита и стационарного колеса доходит до I=2:1 в верхней зоне траектории педалей, что позволяет почти в два раза уменьшить мышечные усилия, необходимые для прохождения верхнего участка траектории педалей. Кроме этого, при повороте шатуна с эксцентричным колесом-сателлитом и вала каретки регулирующими натяжными элементами поддерживается постоянное натяжение в обеих ветвях гибкой передачи и происходит закономерное изменение угла наклона шатуна к вертикали в строгой зависимости от угла поворота вала каретки. Вследствие чего в передней зоне нажима, за счет определенного изменения длин обеих ветвей гибкой передачи, автоматически происходит выдвижение шатуна с педалью вперед, что увеличивает плечо приложения мышечных усилий до суммарной длины шатуна и водила в нижней зоне траектории. При этом благодаря тому, что в предлагаемом приводе шатун ориентирован педалью вниз и передаточному числу в гибкой передаче, равному U=1, ось педали всегда ниже оси вращения шатуна с колесом-сателлитом на водиле, а вектор движения педали имеет постоянное направление относительно направления вращения вала каретки. Тем самым создаются условия для стабильного, цикличного вращения педалей и уменьшается вертикальный размер траектории движения педалей до двойной длины водила. Таким образом, заявляемое изобретение позволяет значительно уменьшить мышечные усилия, затрачиваемые на вращение педалей и снизить физические нагрузки на коленные суставы.
Введение в конструкцию предлагаемого привода отличительных от прототипа существенных признаков позволяет повысить тяговую способность педального привода, получить траекторию движения педалей в виде асимметричного овала, ориентированного близко к горизонту и имеющего размер в продольном, относительно велосипеда, направлении - большая ось 500-600 мм, а поперечный размер в половину меньше - малая ось 220-280 мм. Что является более физиологичным и позволяет совместить вектор мышечных усилий ног с направлением движения педалей на большей части траектории движения педалей, в рабочих образцах около  длины траектории педалей, без применения фиксирующих устройств обуви с педалью, то есть исключить явление «мертвых» точек, а также получить стабильную цикличность вращения педалей, значительное уменьшение мышечных усилий, необходимых для вращения педалей, и снижение физических нагрузок на коленные суставы. Причем длина замкнутого пути, проходимого педалями, приблизительно равна длине окружности, описываемой педалями традиционного велосипеда с шатунами 175 мм.
длины траектории педалей, без применения фиксирующих устройств обуви с педалью, то есть исключить явление «мертвых» точек, а также получить стабильную цикличность вращения педалей, значительное уменьшение мышечных усилий, необходимых для вращения педалей, и снижение физических нагрузок на коленные суставы. Причем длина замкнутого пути, проходимого педалями, приблизительно равна длине окружности, описываемой педалями традиционного велосипеда с шатунами 175 мм.
Наличие отличительных от прототипа существенных признаков позволяет признать заявляемое техническое решение новым.
Из уровня техники не выявлены технические решения, содержащие признаки, совпадающие с отличительными признаками заявляемого устройства, поэтому заявляемое устройство отвечает критерию изобретательского уровня.
Возможность осуществления заявляемого технического решения в промышленности позволяет признать его соответствующим критерию промышленной применимости.
По первому варианту заявляемое устройство показано на чертежах, где
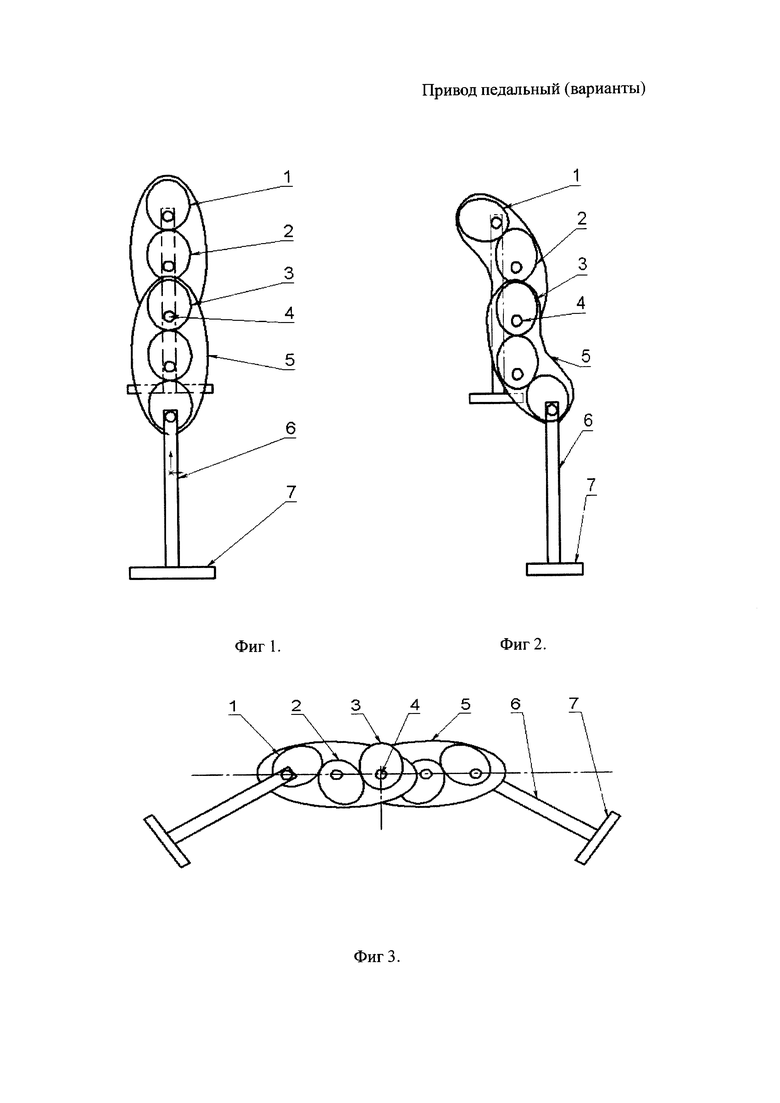
На фиг. 1 схематично показан первый вариант привода с зубчатыми колесами, когда оси колеса-сателлита 1, промежуточного колеса 2 и вала каретки 4 лежат на одной линии.
На фиг. 2 схематично показан вариант привода с зубчатыми колесами, когда оси колеса-сателлита 1, промежуточного колеса 2 и вала каретки 4 не лежат на одной линии.
На фиг. 1 и 3 показан зубчатый педальный привод в положениях с минимальным и максимальным расстояниями между осями педалей соответственно.
На фиг. 8 показаны траектории движения осей педалей при различных значениях эксцентриситета, длин водила 5 и шатуна 6.
Заявляемое устройство в первом варианте состоит из двух планетарных механизмов, каждый из которых содержит водило 5, жестко соединенное первым концом с валом каретки 4, шатун 6 с педалью 7, неподвижно связанный с зубчатым колесом-сателлитом 1, которое шарнирно соединено со вторым концом водила 5, и стационарное зубчатое колесо 3, неподвижно установленное относительно велосипеда и связанное с колесом-сателлитом 1 посредством зубчатой передачи через промежуточное одиночное зубчатое колесо 2 либо блок из спаренных зубчатых колес. При этом колесо-сателлит 1 и промежуточное зубчатое колесо 2 выполнены с возможностью вращения эксцентрично осям, перпендикулярным продольной оси водила, а стационарное колесо 3 установлено неподвижно, с эксцентриситетом относительно вала каретки 4. Эксцентриситет зубчатых колес 1 и 2, а также 2 и 3 выполнен равным. Передаточное отношение колеса-сателлита 1 к промежуточному колесу 2, а также промежуточного колеса 2 к стационарному колесу 3 является переменным и изменяется от I мин=D-e/D+e до I макс=D+e/D-e, где D - большой диаметр колес, е - эксцентриситет соответствующей пары колес за один оборот вала каретки, благодаря равному количеству зубьев колес в каждой ступени передачи, в строгой закономерности от угла поворота водила.
Работа заявляемого устройства по первому варианту
Приложение усилия ноги на педаль 7, установленную на выступающем конце шатуна 6, в направлении вращения вала каретки 4 вызывает поворот колеса-сателлита 1 на водиле 5. Поворачиваясь, колесо-сателлит 1 приводит во вращение промежуточное зубчатое колесо 2, шарнирно установленное на водиле 5. За счет зубчатого зацепления с неподвижным стационарным колесом 3 колесо 2 поворачивает водило 5 и соединенный с ним вал каретки 4. Зубчатое зацепление выставлено так, что когда водило 5 проходит верхнее вертикальное положение, шатун 6 также принимает вертикальное положение с направленной вниз педалью 7. В этот момент ориентация эксцентриситета колеса-сателлита 1 и промежуточного колеса 2 совпадает с вертикальной ориентацией эксцентриситета стационарного колеса 3, при этом минимальный радиус колеса-сателлита 1 совмещается с максимальным радиусом колеса 2, в свою очередь, минимальный радиус колеса 2 совмещается с максимальным радиусом стационарного колеса 3. В результате в верхней зоне траектории движения педали 7 переменное передаточное отношение между колесом-сателлитом 1 и стационарным колесом 3 принимает максимальное значение. Что приводит к большей угловой скорости вращения колеса-сателлита 1 с шатуном 6 относительно водила 5, чем угловая скорость поворота водила 5 с валом каретки 4, благодаря чему происходят сокращение и спрямление верхнего участка траектории движения педали 7. Кроме этого, когда водило 5 приближается к горизонтальному положению, за счет эксцентриситета зубчатых колес, шатун 6 поворачивается на значительный угол от вертикали, а педаль 7 выдвигается вперед относительно оси колеса-сателлита 1. В результате происходит увеличение плеча рычага педали 7 относительно вала каретки 4, до достижения максимального значения в нижнем положении водила 5, когда угол между ним и шатуном 6 равен 180 градусов. Причем в нижней зоне траектории движения педали 7, за счет эксцентриситета зубчатых колес, переменное передаточное отношение между колесом-сателлитом 1 и стационарным колесом 3 принимает минимальное значение. Благодаря этому, в нижней половине траектории движения педали 7 угловая скорость шатуна 6 относительно водила 5 становится меньше угловой скорости поворота вала каретки 4 и изменяется намного медленней, чем в верхней половине, за счет чего траектория движения педали 7, практически, проходит по дуге с радиусом, равным сумме длин шатуна 6 и водила 5. После значительного поворота водила 5 от нижнего вертикального положения назад, за счет эксцентриситета зубчатых колес, угловая скорость колеса-сателлита 1 с шатуном 6 начинает постепенно увеличиваться, то есть угол между шатуном 6 и водилом 5 начинает уменьшаться, при этом педаль 7 приближается к валу каретки 4, а ось колеса-сателлита 1 перемещается вверх. Благодаря чему, дальнейшее нажатие ноги на педаль 7, направленное назад, вызывает движение водила 5 вверх относительно педали 7 и приводит водило 5 в заднее горизонтальное положение.
Таким образом, заявляемое изобретение позволяет провернуть одной ногой вал каретки 4 около от полного оборота, без фиксирующих устройств обуви с педалью.
В результате формируется траектория движения педалей в виде горизонтального, асимметричного овала, со спрямленным верхним участком.
По второму варианту заявляемое устройство показано на чертежах, где
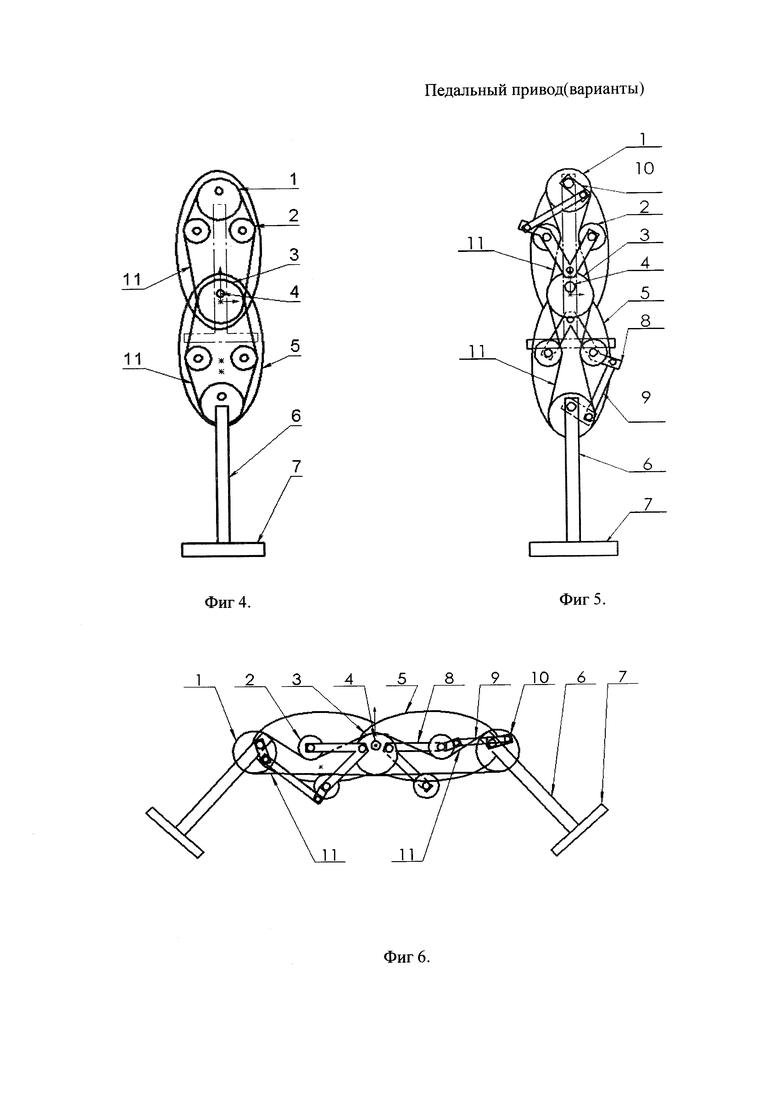
На фиг. 4 схематично показан вариант цепного педального привода с натяжными элементами 2, установленными внутри ветвей цепи 11.
На фиг. 5 схематично показан вариант цепного педального привода с натяжными элементами 2, установленными снаружи ветвей цепи 11, на подвижном кронштейне 8.
На фиг. 4 и 5 показаны положения цепного педального привода с минимальным расстоянием между осями педалей 7.
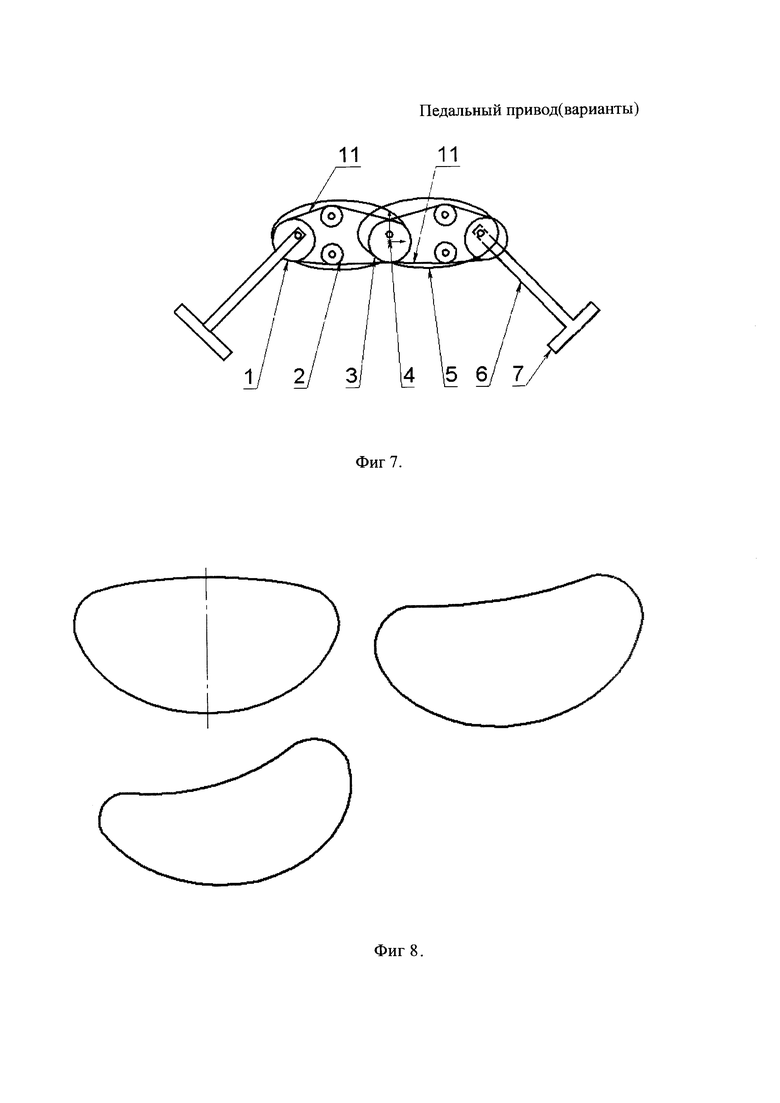
На фиг. 6 и 7 показаны положения с максимальным расстоянием между осями педалей 7.
Заявляемое устройство по второму варианту состоит из водила 5, первым концом жестко соединенного с валом каретки 4, шатуна 6 с педалью 7, неподвижно связанного с колесом-сателлитом 1, шарнирно соединенного со вторым концом водила 5, стационарного колеса 3, неподвижно установленного относительно велосипеда и связанного с колесом-сателлитом 1 посредством гибкой передачи 11. При этом колесо-сателлит 1 и стационарное колесо 3 имеют равный эксцентриситет, кроме того, в момент вертикального положения водила 5 эксцентриситет колеса-сателлита 1 принимает одинаковую ориентацию с эксцентриситетом стационарного колеса 3. Причем колесо-сателлит 1 и стационарное колесо 3, имеющие передаточное число U=1, могут быть как круглой, так и некруглой, одинаковой формы.
Кроме этого, в конструкцию привода введены регулирующие натяжные элементы гибкой передачи 2, установленные в строго определенных точках водила 5 или на кронштейне 8, шарнирно установленном на водиле 5, при этом поворот кронштейна 8 осуществляется через жесткую тягу 9, дополнительным рычагом 10, неподвижно связанным с колеса-сателлитом 1. Причем регулирующие натяжные элементы 2 установлены таким образом, что поддерживают постоянное натяжение обеих ветвей гибкой передачи 11 при поворотах эксцентричного колеса-сателлита 1 и вала каретки 4. Благодаря этому угол поворота шатуна 6 с колесом-сателлитом 1 на своей оси относительно водила 5, находится в строгой закономерности от угла поворота вала каретки 4 относительно транспортного средства.
Работа заявляемого устройства по второму варианту
По второму варианту педальный привод работает следующим образом. Усилие ноги прикладывается к педали 7, в направлении вращения вала каретки 4, и передается шатуну 6 с колесом-сателлитом 1. При этом возникает крутящий момент на колесе-сателлите 1, связанном гибкой передачей 11 со стационарным колесом 3, который осуществляет поворот водила 5 вместе с валом каретки 4. Причем в верхней части траектории движения педалей, когда водило 5 и шатун 6 с педалью 7, направленной вниз, проходят вертикальное положение, эксцентриситет колеса-сателлита 1 принимает одинаковую ориентацию с вертикальной ориентацией эксцентриситета стационарного колеса 3. В этот момент прямая, проходящая через геометрические центры колес 1 и 3, совпадает с продольной плоскостью симметрии водила 5, проходящей через оси вращения колеса-сателлита 1 и вала каретки 4, а гибкая передача 11 охватывает сектор с минимальным радиусом колеса-сателлита 1 и сектор с максимальным радиусом стационарного колеса 3. При этом регулирующие натяжные элементы 2 принимают симметричное положение относительно продольной оси водила, а обе ветви гибкой передачи 11 имеют одинаковую длину. Далее, когда водило 5 поворачивается вперед от вертикального положения, за счет эксцентриситета зубчатых колес, происходит смещение прямой геометрических центров колес 1 и 3 с продольной плоскости симметрии водила 5, проходящей через оси вращения колеса-сателлита 1 и вала каретки 4. При этом регулирующие натяжные элементы 2 в случае размещения в фиксированных точках водила 5 перемещаются вместе с продольной плоскостью симметрии водила 5 относительно прямой, проходящей через геометрические центры колес 1 и 3, таким образом, что уменьшают длину передней, относительно велосипеда, ветви гибкой передачи 11 и увеличивают длину задней ветви. Так как стационарное колесо 3 установлено неподвижно, то регулирующие натяжные элементы 2 перераспределяют участок гибкой передачи 11 с передней ветви на заднюю за счет дополнительного поворота колеса-сателлита 1 с шатуном 6.
В случае размещения регулирующих натяжных элементов 2 на кронштейне 8, при нажатии на педаль 7 происходит вращение колеса-сателлита 1 вместе с дополнительным рычагом 10. При этом после прохождения водилом 5 верхнего вертикального положения, поворот колеса-сателлита 1 вместе с дополнительным рычагом 10, через жесткую тягу 9, отклоняет кронштейн 8 от симметричного положения, относительно продольной оси водила 5, таким образом, что регулирующие натяжные элементы 2 уменьшают длину передней, относительно велосипеда, ветви гибкой передачи 11 и увеличивают длину задней ветви. Так как стационарное колесо 3 установлено неподвижно, регулирующие натяжные элементы 2 перераспределяют участок гибкой передачи 11 с передней ветви на заднюю путем ускоренного поворота колеса-сателлита 1.
Таким образом в верхнем участке траектории движения педали 7 эксцентриситет стационарного колеса 3 и колеса-сателлита 1 и перемещение регулирующих натяжных элементов 2, в обоих случаях их размещения, повышают угловую скорость вращения колеса-сателлита 1 относительно угловой скорости вала каретки 4, тем самым создают максимальное переменное передаточное отношение колеса-сателлита 1 к стационарному колесу 3, а также сокращают и спрямляют верхнюю половину траектории движения педали 7. Кроме того, за счет перемещения регулирующих натяжных элементов 2 около горизонтального положения водила 5 происходят значительное отклонение шатуна 6 от вертикали и выдвижение педали 7 вперед за ось колеса-сателлита 1. Это увеличивает плечо рычага педали 7 относительно вала каретки 4, за счет сложения длин водила 5 и шатуна 6, до достижения максимального значения в нижнем положении водила 5, параллельном шатуну 6 с педалью 7, направленной вниз. В этот момент регулирующие натяжные элементы 2 снова принимают симметричное положение относительно продольной оси водила 5, а ветви гибкой передачи 11 равны. При этом гибкая передача 11 охватывает сектор с минимальным радиусом стационарного колеса 3 и сектор с максимальным радиусом колеса-сателлита 1, то есть переменное передаточное отношение между колесом 1 и 3 принимает минимальное значение. Благодаря этому, в нижней половине траектории движения педали 7 угловая скорость шатуна 6, относительно водила 5, становится меньше угловой скорости поворота вала каретки 4 и изменяется намного медленней, чем в верхней половине, за счет чего траектория движения педали 7, практически, проходит по дуге с радиусом, равным сумме длин шатуна 6 и водила 5. После значительного поворота водила 5 от нижнего вертикального положения назад регулирующие натяжные элементы 2 перемещаются в другую сторону от продольной оси водила 5 и начинают перераспределять участок гибкой передачи 11, за счет чего угловая скорость колеса-сателлита 1 с шатуном 6 постепенно увеличивается, то есть угол между шатуном 6 и водилом 5 начинает уменьшаться, при этом педаль 7 приближается к валу каретки 4, а ось колеса-сателлита 1 перемещается вверх. Благодаря чему, дальнейшее нажатие ноги на педаль 7, направленное назад, вызывает движение водила 5 вверх, относительно педали 7, и приводит водило 5 в заднее горизонтальное положение.
Таким образом, заявляемое изобретение позволяет провернуть одной ногой вал каретки 4 около от полного оборота, без фиксирующих устройств обуви с педалью. Благодаря тому, что колеса 1 и 3 имеют одинаковые - эксцентриситет, форму и размеры - шатун 6 с колесом-сателлитом 1 совершает один оборот вокруг водила 5 за один оборот вала каретки 4, при этом педаль 7 находится все время ниже оси вращения колеса-сателлита 1 и описывает траекторию в виде горизонтального асимметричного овала, со спрямленным верхним участком.
Технико-экономический эффект
Использование заявляемого устройства по двум вариантам позволит: повысить тяговую способность педального привода; получить стабильную цикличность вращения педалей; исключить явление «мертвых» точек и на 25-30 процентов уменьшить вертикальный размер траектории, что значительно снизит физические нагрузки на коленные суставы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД (ВАРИАНТЫ) | 2010 |
|
RU2421366C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ВЕЛОСИПЕД С ЭЛЛИПТИЧЕСКИМ ПРИВОДОМ | 2013 |
|
RU2543134C2 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Механизм качания кристаллизатора | 1982 |
|
SU1026937A1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
Группа изобретений относится к области машиностроения, в частности к педальным приводам. Педальный привод выполнен из двух планетарных механизмов, оппозитно размещенных на валу каретки, каждый из которых содержит водило. шатун с педалью и зубчатое стационарное колесо. По первому варианту в приводе используются некруглые, зубчатые колесо-сателлит и стационарное колесо, установленные с эксцентриситетом, связанные двухступенчатой зубчатой передачей. Изменение угла наклона шатуна к вертикали строго связано с углом поворота вала каретки. По второму варианту зубчатые колесо-сателлит и стационарное колесо, установленные с эксцентриситетом, связаны посредством цепной или ременной передачи. Добавлены регулирующие натяжные элементы, положение которых находится в строгой зависимости от угла поворота вала каретки, размещенные в фиксированных точках водила или на кронштейне, шарнирно установленном на водиле, Поворот кронштейна осуществляется жесткой тягой под действием дополнительного рычага. Достигается повышение тяговой способности педального привода. 2 н.п. ф-лы, 8 ил.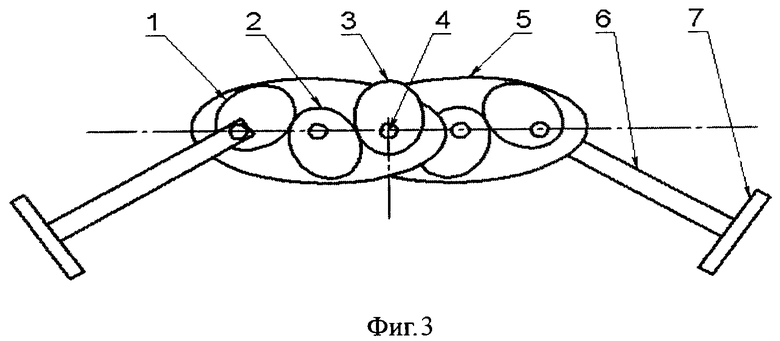
1. Педальный привод, выполненный из двух планетарных механизмов, оппозитно размещенных на валу каретки, каждый из которых содержит водило, первым концом жестко соединенное с валом каретки, шатун с педалью, неподвижно связанный с зубчатым колесом-сателлитом, которое шарнирно соединено со вторым концом водила, и зубчатое стационарное колесо, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом механическими передачами, отличающийся тем, что в приводе используются некруглые, зубчатые колесо-сателлит и стационарное колесо, установленные с эксцентриситетом, связанные двухступенчатой зубчатой передачей, с передаточным числом U=1, через промежуточное, некруглое, эксцентричное зубчатое колесо, шарнирно помещенное на водиле, причем в каждой ступени передачи зубчатые колеса имеют одинаковую форму, например эллиптическую, и одинаковый эксцентриситет, благодаря чему в каждой ступени передачи создается переменное передаточное отношение, принимающее значения от Iмин=D-e/D+e до Iмакс=D+e/D-e, где D - большой диаметр колес, а е - эксцентриситет, за один оборот вала каретки, при этом изменение угла наклона шатуна к вертикали строго связано с углом поворота вала каретки, кроме того, эксцентричное промежуточное, зубчатое колесо может быть блоком из двух эксцентричных зубчатых колес, а оси колеса-сателлита, промежуточного колеса и вала каретки лежат или не лежат на одной прямой.
2. Педальный привод, выполненный из двух планетарных механизмов, оппозитно размещенных на валу каретки, каждый из которых содержит водило, первым концом жестко соединенное с валом каретки, шатун с педалью, неподвижно связанный с зубчатым колесом-сателлитом, которое шарнирно соединено со вторым концом водила, и зубчатое стационарное колесо, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом механическими передачами, отличающийся тем, что зубчатые колесо-сателлит и стационарное колесо, установленные с эксцентриситетом, связаны посредством цепной или ременной передачи с передаточным числом U=1 и имеют одинаковую форму и одинаковый эксцентриситет, создающие переменное передаточное отношение в передаче, которое за один оборот вала каретки принимает значение от Iмин=D-e/D+e до Iмакс=D+e/D-е, где D - большой диаметр колес и е - эксцентриситет, кроме этого, внутри или снаружи ветвей гибкой передачи добавлены регулирующие натяжные элементы, положение которых находится в строгой зависимости от угла поворота вала каретки, размещенные в фиксированных точках водила или на кронштейне, шарнирно установленном на водиле, причем поворот кронштейна осуществляется жесткой тягой под действием дополнительного рычага, неподвижно связанного с колесом-сателлитом, благодаря этому при вращении эксцентричного колеса-сателлита и вала каретки, вследствие определенного перемещения регулирующих натяжных элементов, закономерно изменяется длина обеих ветвей гибкой передачи, при этом в них поддерживается постоянное натяжение и происходит изменение угла наклона шатуна к вертикали в строгой зависимости от угла поворота вала каретки.
| US 4782722 A, 08.11.1988 | |||
| УСТРОЙСТВО ПЛАНЕТАРНОЙ КОРОБКИ ПЕРЕДАЧ ВЕЛОСИПЕДА | 2011 |
|
RU2527579C2 |
| US 2016052600 A1, 25.02.2016 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

