Изобретение относится к устройствам для приведения в действие транспортных средств мускульной энергией человека, в том числе, к велосипедам для людей с ограниченными физическими возможностям
Известен педальный привод [описание изобретения к патенту РФ №2068364, МПК-6: В62М 1/02; дата публикации: 27.10.1996], содержащий ведущую звездочку, жестко закрепленную на валу каретки, связанную при помощи цепного привода с ведомой звездочкой, сопрягаемой с ведущим колесом, первую ступень привода, выполненную из двух планетарных механизмов, имеющих водила и жестко соединенных с валом каретки, со свободно установленными на выступающих концах сателлитами, зацепленными с передаточным отношением, равным единице, с солнечными зубчатыми звеньями, установленными концентрично валу каретки с двух боковых сторон и неподвижно относительно корпуса транспортного средства, и педали, установленные на задних концах горизонтальных рычагов, жестко опирающихся передними концами на оси сателлитов.
Известно устройство для педального привода [патент Канады № СА 2389076 (А1), МПК-7: В62М 1/02; дата публикации: 03.05.2001], содержащее цепную передачу, в которой ведомая шестерня выполнена круговой и установлена с возможностью вращения вокруг оси каретки, при этом ось вращения ведомой шестерни и ось каретки совпадают, а ведущая шестерня выполнена отличной от круговой с осью вращения, проходящей вне ее геометрического центра.
Известно устройство для педального привода [патент Германии № DE 29918657 (U1), МПК-7: В62М 3/06; В62М 1/02; В62М 9/06; дата публикации: 06.07.2000], содержащее первый рычаг, соединенный первым концом с вращающимся валом, второй рычаг, первым концом шарнирно соединенный со вторым концом первого рычага, на втором конце которого установлена педаль.
Известен также велосипедный привод [патент Франции № FR 2782546(A1); МПК-7: F16H 35/00; В62М 3/06; дата публикации: 25.02.2000], содержащий первичный рычаг, соединенный с валом, которому придана возможность вращения, сателлит, включающий шестерню и вторичный рычаг на валу. Сателлиту придана возможность свободного вращения на конце первичного рычага. Концентрично с валом неподвижно установлена шестерня с передаточным числом 2:1 по отношению к шестерне сателлита. Шестерня связана с неподвижной шестерней посредством цепи, обеспечивающей сателлиту вращательное движение. Шатуны привода выполнены в виде цепных или зубчатых планетарных механизмов. Недостатком данного привода является одновременное достижение обеими педалями симметрично расположенных мертвых точек, в которых оси педалей, рычагов и каретки расположены соосно.
Недостатком всех известных педальных приводов является необходимость приложения значительных усилий, необходимых для вращения педалей.
Целью изобретения является снижение усилий, необходимых для вращения педалей, за счет несовпадения моментов прохождения педалями привода его верхней и нижней "мертвых" точек, в которых направление вектора мышечного усилия пересекает ось каретки, а вращающий момент равен нулю.
Поставленная цель достигается несколькими вариантами выполнения педального привода.
В первом варианте в педальном приводе, выполненном в виде планетарного механизма и содержащем водило, первым концом соединенное с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, стационарное колесо с передаточным числом 2:1 по отношению к колесу-сателлиту, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом посредством цепной или ременной передачи, второй конец водила шарнирно соединен с колесом-сателлитом в точке, смещенной от центра последнего, а стационарной шестерне придана форма, отличная от круговой.
Длина W водила и длина R рычага выбраны из соотношение W≥R в зависимости от конструктивно заданной траектории движения педалей для конкретного пользователя.
Связь стационарного колеса с колесом-сателлитом также может быть осуществлена с использованием различных вариантов шестеренчатых передач.
Во втором варианте в педальный привод, выполненный в виде планетарного механизма и содержащий водило, соединенное первым концом с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, которое шарнирно соединено со вторым концом водила, стационарное колесо, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом посредством шестеренчатой передачи с нечетным числом промежуточных ведущих зубчатых колес, введены промежуточное ведущее зубчатое колесо и дополнительное ведомое зубчатое колесо, жестко связанные между собой, причем второй конец водила шарнирно соединен с колесом-сателлитом, колесо-сателлит и промежуточное ведущее зубчатое колесо выполнены с возможностью вращения концентрично осям, перпендикулярным продольной оси водила, промежуточная ведомая шестерня установлена эксцентрично относительно оси вращения ведущей промежуточной шестерни с возможностью взаимодействия со стационарным колесом, установленным эксцентрично относительно вала каретки, при этом передаточные числа колеса-сателлита и промежуточного ведущего колеса, а также стационарного колеса и промежуточной ведомой шестерни выбраны из расчета 1:2 и 1:1 соответственно.
Ось рычага 3, прикрепленного к колесу-сателлиту 5, либо пересекает центр последнего, либо нет.
Длины водила W и рычага R выбраны из соотношение W≥R.
На фиг.1 схематично показан цепной педальный привод.
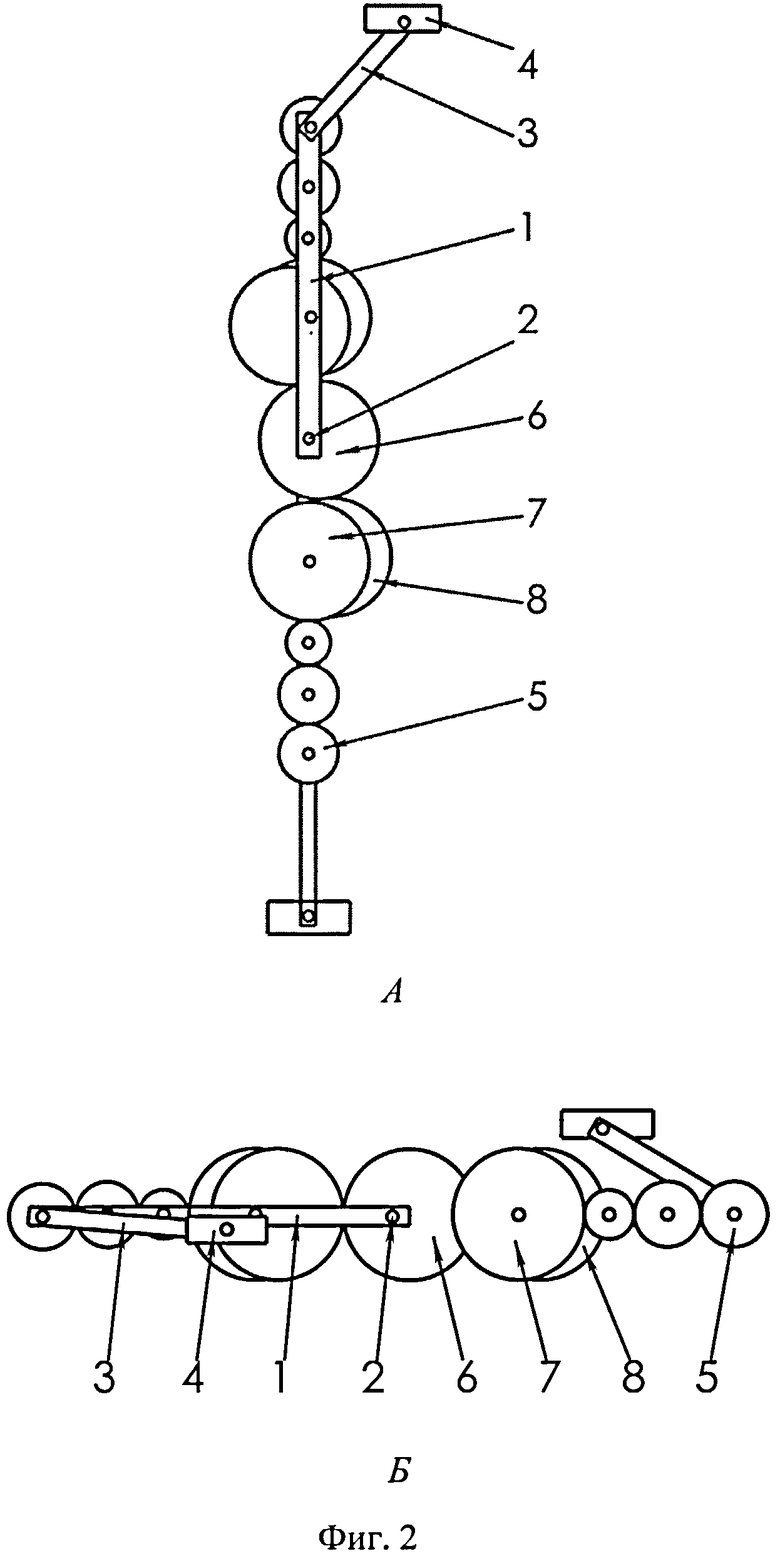
На фиг.2 схематично показан шестеренчатый педальный привод.
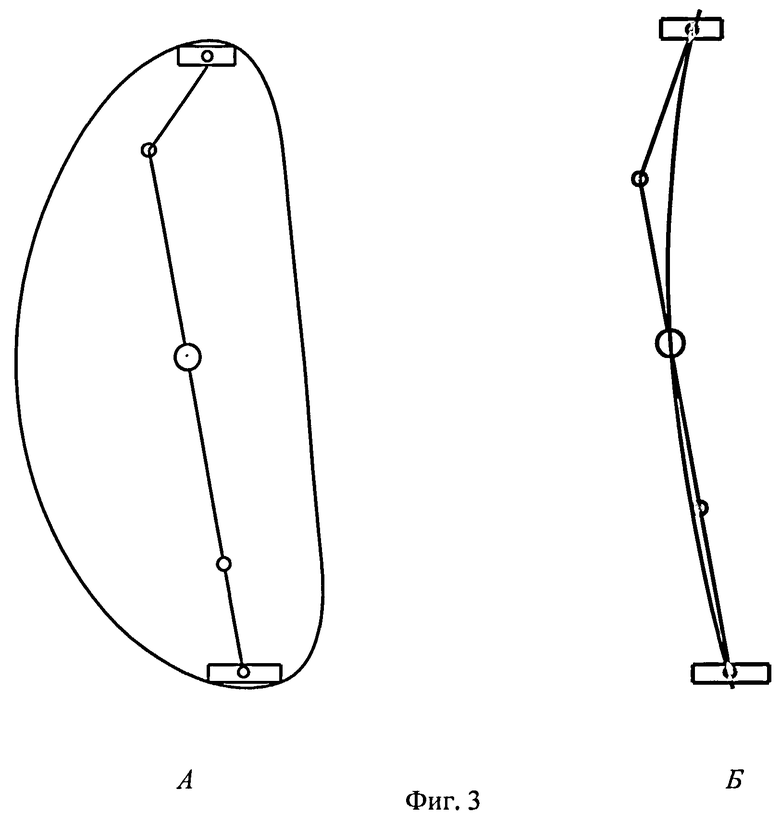
На фиг.3 схематично показаны траектории движения осей вращения педалей в цепном приводе относительно вала каретки.
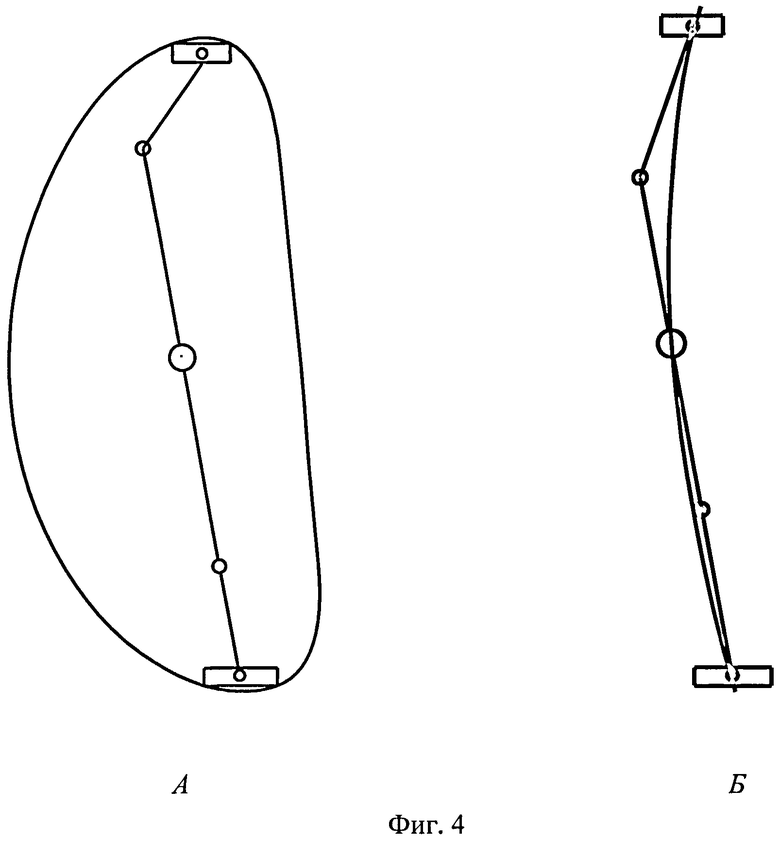
На фиг.4 схематично показаны траектории движения осей вращения педалей в шестеренчатом приводе относительно вала каретки.
В первом варианте педальный привод включает водило 1, первый конец которого соединен с валом каретки 2, рычаг 3 с педалью 4, неподвижно связанный с колесом-сателлитом 5, стационарное колесо 6 с передаточным числом 2:1 по отношению к колесу-сателлиту 5. Стационарное колесо 6 установлено неподвижно относительно транспортного средства и связано с колесом-сателлитом 5 посредством цепной или ременной передачи. Второй конец водила 2 шарнирно соединен с колесом-сателлитом 5, в точке, смещенной от его центра, а стационарной шестерне 6 придана форма, отличная от круговой. На фиг.1-А, 1-Б и 1-В показаны положения цепного педального привода с максимальным, промежуточным и минимальным расстояниями между осями педалей соответственно. На фиг.3-А и 3-Б показаны траектории движения осей педалей при различных соотношениях длин W водила (1) и R рычага (3): W>R и W=R.
В втором варианте, при использовании шестеренчатой передачи, педальный привод содержит водило 1, соединенное первым концом с валом каретки 2, рычаг 3 с педалью 4, неподвижно связанный с колесом-сателлитом 5, которое шарнирно соединено со вторым концом водила 2, и стационарное колесо 6, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом 5 посредством шестеренчатой передачи с нечетным числом промежуточных ведущих зубчатых колес. Кроме того, в привод введены промежуточное ведущее зубчатое колесо 7 и дополнительное ведомое зубчатое колесо 8, жестко связанные между собой, при этом колесо-сателлит 5 и промежуточное ведущее зубчатое колесо 7 выполнены с возможностью вращения концентрично осям, перпендикулярным продольной оси водила, а промежуточная ведомая шестерня 8 установлена эксцентрично относительно оси вращения ведущей промежуточной шестерни 7 с возможностью взаимодействия со стационарным колесом 6, установленным эксцентрично относительно вала каретки 2. Эксцентриситеты шестерней 6 и 8 выполнены равными. Передаточные числа колеса-сателлита 5 и промежуточного ведущего колеса 7, а также стационарного колеса 6 и промежуточной ведомой шестерни 8 выбраны из расчета 1:2 и 1:1 соответственно.
Ось рычага 3, прикрепленного к колесу-сателлиту 5, либо пересекает центр последнего, либо нет.
На фиг.2-А и 2-Б показан шестеренчатый педальный привод в положениях с максимальным и минимальным расстояниями между осями педалей соответственно. На фиг.4-А и 4-Б показаны траектории движения осей педалей при различных соотношениях длин W водила (1) и R рычага (3): W>R и W=R. Траектории аналогичны показанным на фиг.3-А и 3-Б
Педальный привод работает следующим образом.
В варианте выполнения механизма с цепной или ременной передачей усилие, прилагаемое к педали 4, установленной на одном конце рычага 3, другим концом неподвижно связанного с колесом-сателлитом (5), передается к колесу-сателлиту 5, шарнирно и эксцентрично установленному на втором выступающем конце водила 1 с возможностью свободного вращения, при этом первый конец водила 1 соединен с валом каретки 2.
Так как колесо-сателлит 5 связано при помощи цепной или ременной передачи со стационарным колесом 6, то возникающий от прилагаемого к педали 4 усилия крутящий момент осуществляет поворот водила 1 совместно с валом каретки 2.
При нажатии на педаль 4 вниз ось вращения колеса-сателлита 5 перемещается по круговой траектории радиуса водила 1, в то же время благодаря передаточному числу (соотношению зубьев) стационарного колеса 6 и колеса-сателлита 5, равному 2:1, колесо-сателлит 5 совершает два оборота вокруг своей оси вращения за один поворот водила 1.
Ввиду эксцентричного положения оси вращения колеса-сателлита 5, для сохранения допустимых пределов натяжения цепи или ремня, стационарное колеса 6 выполнено в форме эллипса, при этом его оси не совпадают с вертикалью или горизонталью. За счет некоторого разворота эллиптического стационарного колеса 6 в момент прохождения центра колеса-сателлита 5 в нижней части траектории точки своего максимального удаления от оси каретки, когда ось каретки 2, ось вращения колеса-сателлита 5 и геометрический центр сателлита оказываются на одной линии, рычаг 3 педали 4 находится под углом к оси водила 1, меньшим 180 градусов, что обеспечивает свободное прохождение противоположной педалью 4 своей верхней мертвой точки, а благодаря эксцентричности установки оси вращения колеса-сателлита 5 возникает дополнительный положительный вращающий момент. В результате, за счет эллиптической формы стационарного колеса 6 и периодического изменения расстояния между осями каретки 2 педали 4, последняя движется по асимметричной эллиптической траектории.
В педальном приводе, выполненном с использованием шестеренчатых передач, мускульное усилие, прилагаемое к педали 4, передается к рычагу к шестерней-сателлитом 5, при этом, вращаясь, сателлит 5 приводит во вращение находящееся в зацеплении с ним промежуточное зубчатое колесо 7, жестко соединенное с установленным эксцентрично относительно оси колеса 7 зубчатым колесом 8.
В результате обегания шестерни 8 вокруг стационарной шестерни 6 происходит поворот водила 1 и соединенного с ним вала каретки 2.
Так как передаточные числа колеса-сателлита (5) и промежуточной ведущей шестерни (7), а также стационарного колеса (6) и промежуточной ведомой шестерни (8) выбраны из расчета 1:2 и 1:1 соответственно, то за два оборота сателлита 5 происходит один оборот водила 1.
Ввиду того что эксцентриситеты шестерней 6 и 8 выполнены равными и ориентированы вперед по ходу вращения педалей, момент совмещения точек минимального радиуса колеса 8 и максимального радиуса колеса 6 совпадает с серединой фазы нажатия на педаль 4. Вследствие этого дуга обегания солнечным механизмом неподвижного колеса 6 в фазе нажатия заметно длиннее, чем в фазе подъема. В результате, при движении педали 4 вниз от верней мертвой точки до нижней водило 1 выполняет поворот значительно больше 180 градусов, при этом, когда первая педаль 4 проходит верхнюю мертвую точку, нижний противоположный рычаг 3 со второй педалью 4 еще находится под углом к водилу 1, что позволяет, при дальнейшем нажатии на вторую педаль до полного распрямления нижнего рычага 3 в нижней мертвой точке, первой педали 4 пройти верхнюю мертвую точку и поставить верхний рычаг 3 под углом к водилу 1 для беспрепятственного последующего нажатия и перемещения первой педали 4 вниз. В предельном случае равенства длины W водила (1) и длины R рычага (3) траектория движения педалей превращается в отрезок дуги, пересекающей ось вала каретки (2).
Использование предлагаемого педального привода обеспечивает снижение усилий, необходимых для перемещения педалей, за счет выбора оптимальных траекторий их движения и исключения совпадения моментов прохождения педалями привода его верхней и нижней "мертвых" точек, что особенно важно для людей с ограниченными физическими возможностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| Кареточный узел педального привода | 1985 |
|
SU1320118A1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| Индивидуальное транспортное средство | 2016 |
|
RU2656802C2 |
Изобретение относится к велосипедам с кривошипными механизмами ножного действия, содержащими рычаги автоматически регулируемой длины с эллиптическим или с другим некруговым вращательным движением. Педальный привод с использованием цепной или ременной передачи включает водило (1), первый конец которого соединен с валом каретки (2), рычаг (3) с педалью (4), неподвижно связанный с колесом-сателлитом (5), стационарное колесо (6) с передаточным числом 2:1 по отношению к колесу-сателлиту (5). Стационарное колесо (6) установлено неподвижно относительно транспортного средства и связано с колесом-сателлитом (5) посредством цепной или ременной передачи. Второй конец водила (2) шарнирно соединен с колесом-сателлитом (5), в точке, смещенной от его центра, а стационарному колесу (6) придана форма, отличная от круговой. Решение направлено на снижение усилий, необходимых для вращения педалей, за счет обеспечения несовпадения моментов прохождения педалями верхней и нижней «мертвых» точек. 2 н. и 2 з.п. ф-лы, 4 ил.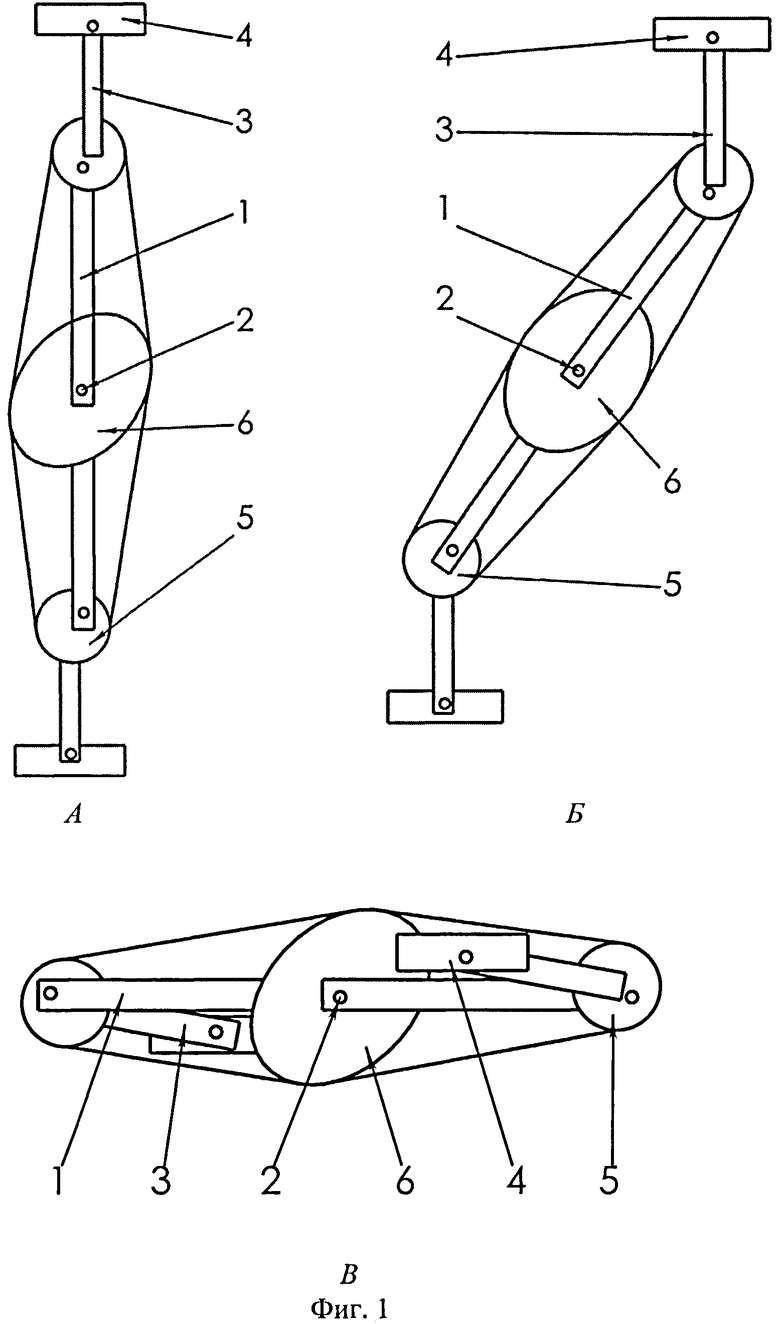
1. Педальный привод, выполненный в виде планетарного механизма и содержащий водило, первым концом соединенное с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, стационарное колесо с передаточным числом 2:1 по отношению к колесу-сателлиту, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом посредством цепной или ременной передачи, при этом второй конец водила шарнирно соединен с колесом-сателлитом, отличающийся тем, что шарнирное соединение водила с колесом-сателлитом выполнено в точке, смещенной от центра последнего, а стационарной шестерне придана форма, отличная от круговой.
2. Педальный привод по п.1, отличающийся тем, что длины водила W и рычага R выбраны из соотношения W≥R.
3. Педальный привод, выполненный в виде планетарного механизма и содержащий водило, соединенное первым концом с валом каретки, рычаг с педалью, неподвижно связанный с колесом-сателлитом, которое шарнирно соединено со вторым концом водила, и стационарное колесо, неподвижно установленное относительно транспортного средства и связанное с колесом-сателлитом посредством шестеренчатой передачи с нечетным числом промежуточных ведущих зубчатых колес, например одним, отличающийся тем, что в него введены промежуточное ведущее зубчатое колесо и дополнительное ведомое зубчатое колесо, жестко связанные между собой, колесо-сателлит и промежуточное ведущее зубчатое колесо выполнены с возможностью вращения концентрично осям, перпендикулярным продольной оси водила, промежуточная ведомая шестерня установлена эксцентрично относительно оси вращения ведущей промежуточной шестерни с возможностью взаимодействия со стационарным колесом, установленным эксцентрично относительно вала каретки, при этом передаточные числа колеса-сателлита и промежуточного ведущего колеса, а также стационарного колеса и промежуточной ведомой шестерни выбраны из расчета 1:2 и 1:1, соответственно, а эксцентриситеты промежуточной ведомой шестерни и стационарного колеса выполнены равными.
4. Педальный привод по п.3, отличающийся тем, что длины водила W и рычага R выбраны из соотношения W≥R.
| СПОСОБ И СИСТЕМА ЗАЩИТЫ УНИВЕРСАЛЬНОГО КЛЮЧА | 2004 |
|
RU2389076C2 |
| DE 29918657 U1, 10.08.2000 | |||
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| US 5419572 A, 30.05.1995 | |||
| КОРМОВОЙ ПРОДУКТ ДЛЯ ДОМАШНИХ ЖИВОТНЫХ | 2018 |
|
RU2782546C2 |

