Изобретение относится к электроэнергетике и может быть использовано для автоматического регулирования перетоков мощности в межсистемных электропередачах (МЭП).
Цель изобретения - повышение быстродействия регулирования перетока мощности.
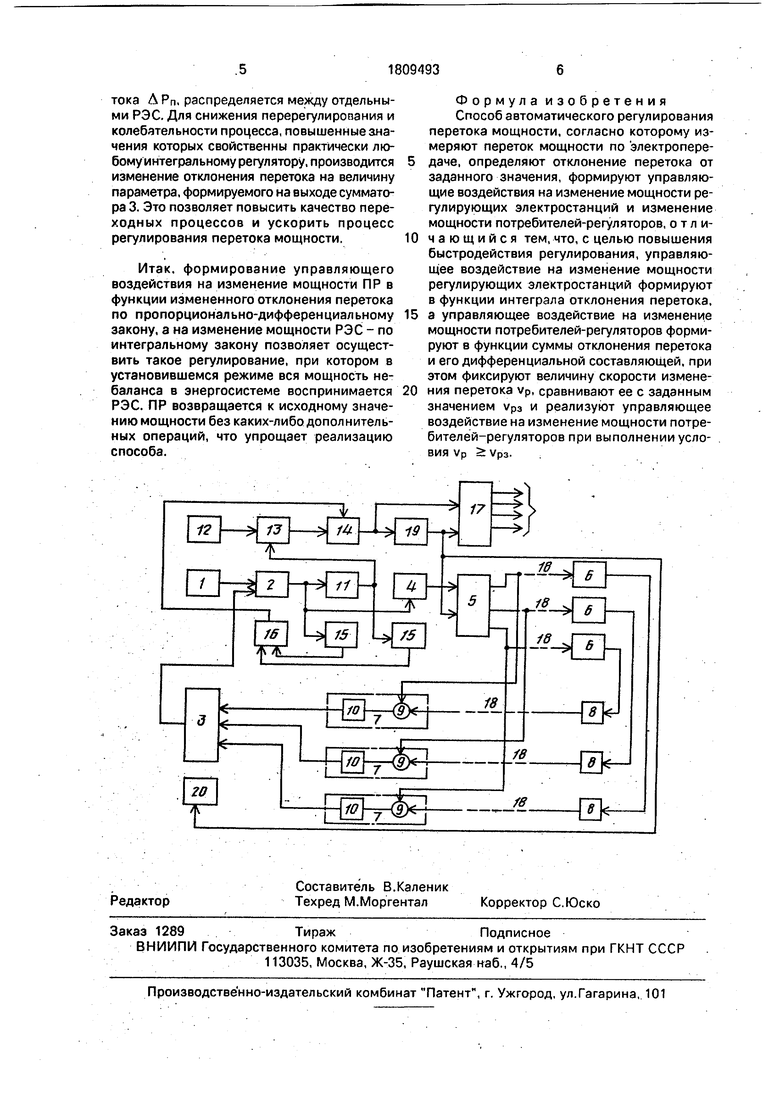
На чертеже показана схема осуществления способа автоматического регулирования перетока мощности.
Система содержит орган 1 измерения отклонения перетока мощности, элемент 2 формирования измененного отклонения перетока, связанный по второму входу с сумматором 3, интегратор 4 канала формирования управляющего воздействия на изменение мощности РЭС, распределитель 5 задания мощности РЭС, регулятор 6 мощности соответствующей РЭС, блок 7 формирования обратной переходной функции соответствующей РЭС, датчик 8 фактической мощности соответствующей РЭС, элемент 9 вычитания, усилитель 10 с коэффициентом усиления, равным коэффициенту влияния изменения мощности соответствующей РЭС на пере- ток мощности, блок 11 дифференцирования, блок 12 задания пороговой величины производной перетока, блок 13 сравнения, клапан 14, блок 15 умножения на коэффициент, сумматор 16, блок 17 распределения задания на изменение мощности ПР, канал 18 передачи информации, блок 19 формирования управляющего воздействия, направленного на компенсацию недоотпуска энергии ПР, инвертор 20.
Система автоматического регулирования работает следующим образом.
Орган 1 производит измерение фактического отклонения перетока Рп от заданного значения (уставки). Элемент 2 по величине отклонения перетока формирует на своем выходе измененное отклонение перетока А Рп путем вычитания из величины
Ё
00
о о
-N Ю СО
отклонения перетока Рп значения параметра на выходе сумматора 3 Рп. Для формиро- вания этого параметра производят измерения мощностей РЭС, фиксируемых датчиками 8. По каналам 18 значения мощностей РЭС передаются на входы соответствующих элементов 9 вычитания. На вторые входы этих элементов от распределителя 5 поступают величины задаваемых мощностей ПЭС. Выходной параметр элемента 9, равный разности задаваемой и фактической мощности РЭС, умножается в усилителе 10 на величину, равную коэффициенту влияния изменения мощности соответствующей РЭС на переток мощности. Выходные параметры всех усилителей 10 суммируются в сумматоре 3 и с обратным знаком подаются на вход элемента 2. Изме- .ненное отклонение перетока А Рп Рп-Рп поступает на интегратор 4, который формирует управляющее воздействие Ррэс.з по
интегральному закону Ррэс.з -Ки Д Pndt,
где Ки - коэффициент пропорциональности, величина которого должна быть согласована с допустимым быстродействием изменения мощности РЭС. Воздействие Ррэс.з в соответствии с коэффициентами долевого участия распределяется между отдельными РЭС. От распределителя 5 задания на изменение мощности передаются по каналам 18 в регуляторы 6 соответствующих РЭС.
Воздействие на изменение мощности ПР Рпр.з образуется в функции измененного отклонения перетока ДРп по пропорционально-дифференциальному закону управления Рпр.з Кп А Рп + KAd A Pn/dt, где «ц и Кд - коэффициенты усиления пропорциональной и дифференциальной составляющих регулирования перетока. Первая составляющая формируется первым блоком умножения 15, вторая - блоком 11 дифференцирования и вторым блоком умножения на коэффициент 15. С выхода сумматора 16 величина воздействия Рпр.з поступает на клапан 14, который пропускает информацию на вход блока 17 распределения, если соблюдается условие: скорость изменения
перетока VP --т-- , определяемая блоком 11, превышает пороговое значение этой скорости Vpa, фиксируемой в блоке 12. При выполнении условия Vp Vp3 блок 13 сравнения открывает клапан 14. Таким образом, канал управления ПР. обладающих больших быстродействием изменения мощности, включается при интенсивности электромеханического процесса, превышающей заданный уровень. Воздействие Рпр.з распределяется между отдельными ПР блоком 17.
0
5
0
5
0
5
0
5
0
5
Рассмотрим динамику процесса. Отклонение перетока ЛРП при соблюдении условия Vp Vp3 вызывает образование управляющего воздействия по каналу регулирования РП Рпр.з. Высокое быстродействие изменения мощности ПР позволяет за несколько секунд осуществить (частично или полностью) подавление отклонения перетока. Степень подавления определяется значением текущего динамического диапазона регулирования мощности РП и величиной коэффициента Кп. За время формирования воздействия Рпр.з и его реализации не произойдет сколько-нибудь заметного изменения управляющего воздействия по каналу регулирования мощности РЭС, так как коэффициент пропорциональности (коэффициент усиления интегратора) выбирается с расчетом достаточно медленного изменения управляющего воздействия Ррэс.з. В квази- установившемся режиме составляющая
воздействия Кд --т-- снижается до нуля.
По мере набора мощности РЭС при реализации воздействия Ррэс.з снижается значение второй составляющей управляющего воздействия КдДРп ввиду уменьшения отклонения ДРп. Интегральный закон регулирования мощности РЭС позволяет в установившемся режиме свести отклонение перетока ДРП к нулю. Нулю будет равно и воздействие Рпр.з. При этом ПР возвращаются в заданный режим, определяемый их технологией, а небаланс мощности в энергосистеме ликвидируется за счет изменения мощности РЭС.
Для компенсации недоотпуска энергии ПР в блоке 19 производится учет этой энергии за период принудительного снижения мощности ПР. В режиме компенсации блок 19 вырабатывает управляющие воздействия на увеличение мощности ПР и РЭС. Воздействия воспринимаются распределителями 17 и 5 и передаются-на соответствующие ПР и РЭС. Для блокирования приращения задания мощности РЭС в период компенсации в схеме предусмотрен инвертор 20, образующий на своем выходе сигнал, который поступает на вход сумматора 3 и полностью компенсирует (подавляет) приращения сигналов усилителей 10, вызванные управляющим воздействием блока 19.
Если скорость изменения перетока Vp меньше порогового значения Vp3, то блок 13 вырабатывает запрещающее воздействие и клапан 14 будет закрыт. В этом случае в регулировании перето.ка будут участвовать только РЭС. Управляющее воздействие Ррэс.з, пропорциональное интегралу отклонения перетока Д Рп. распределяется между отдельными РЭС. Для снижения перерегулирования и колебательности процесса, повышенные значения которых свойственны практически любому интегральному регулятору, производится изменение отклонения перетока на величину параметра, формируемого на выходе сумматора 3. Это позволяет повысить качество переходных процессов и ускорить процесс регулирования перетока мощности.
Итак, формирование управляющего воздействия на изменение мощности ПР в функции измененного отклонения перетока по пропорционально-дифференциальному закону, а на изменение мощности РЭС - по интегральному закону позволяет осуществить такое регулирование, при котором в установившемся режиме вся мощность небаланса в энергосистеме воспринимается РЭС. ПР возвращается к исходному значению мощности без каких-либо дополнительных операций, что упрощает реализацию способа.
Формула изобретения Способ автоматического регулирования перетока мощности, согласно которому измеряют переток мощности по электропередаче, определяют отклонение перетока от заданного значения, формируют управляющие воздействия на изменение мощности регулирующих электростанций и изменение мощности потребителей-регуляторов, о т л ичающийся тем, что, с целью повышения быстродействия регулирования, управляющее воздействие на изменение мощности регулирующих электростанций формируют в функции интеграла отклонения перетока,
а управляющее воздействие на изменение мощности потребителей-регуляторов формируют в функции суммы отклонения перетока и его дифференциальной составляющей, при этом фиксируют величину скорости изменения перетока vp, сравнивают ее с заданным значением vp3 и реализуют управляющее воздействие на изменение мощности потребителей-регуляторов при выполнении условия vp vp3.
Сущность изобретения: для подавления отклонения перетока формируют управляющее воздействие на изменение мощности потребителей-регуляторов в функции суммы отклонения перетока и его дифференциальной составляющей и реализуют его при скорости изменения перетока, превышающей заданное значение. Одновременно с этим формируют управляющее воздействие на изменение мощности регулирующих электростанций в функции интеграла упреждающего отклонения пере тока. В установившемся режиме производят компенсацию энергии потребителей-регуляторов путем одновременного увеличения мощности регулирующих электростанций и потребителей-регуляторов. 1 ил.
| Способ автоматического регулирования перетока активной мощности по слабой линии межсистемной связи | 1969 |
|
SU505085A1 |
| Способ автоматического регулирования перетока мощности между двумя частями энергосистемы | 1971 |
|
SU450284A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического регулирования параметров энергосистемы "Юлика | 1984 |
|
SU1297166A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
