112971662
Изобретение относится к электро-ватель 25 канапа обратной переходной
энергетике и может быть использова-функции соответствующей электростанно для автоматического регулгфованиядни, дат.чик 26 сигналов неисправности
параметров Энергосистемы, напримеррегулятора мощности и тракТа управле-
перетоков мощности, частоты и напря- соответствующей электростанции и
жения.управляемую схему 27 задержки соотЦелью изобретения является повыше-йетствующей электростанции. ние надежности и экономичности, а Схема 10 запуска при наличии на
также точности.входе отличного от нуля по модулю
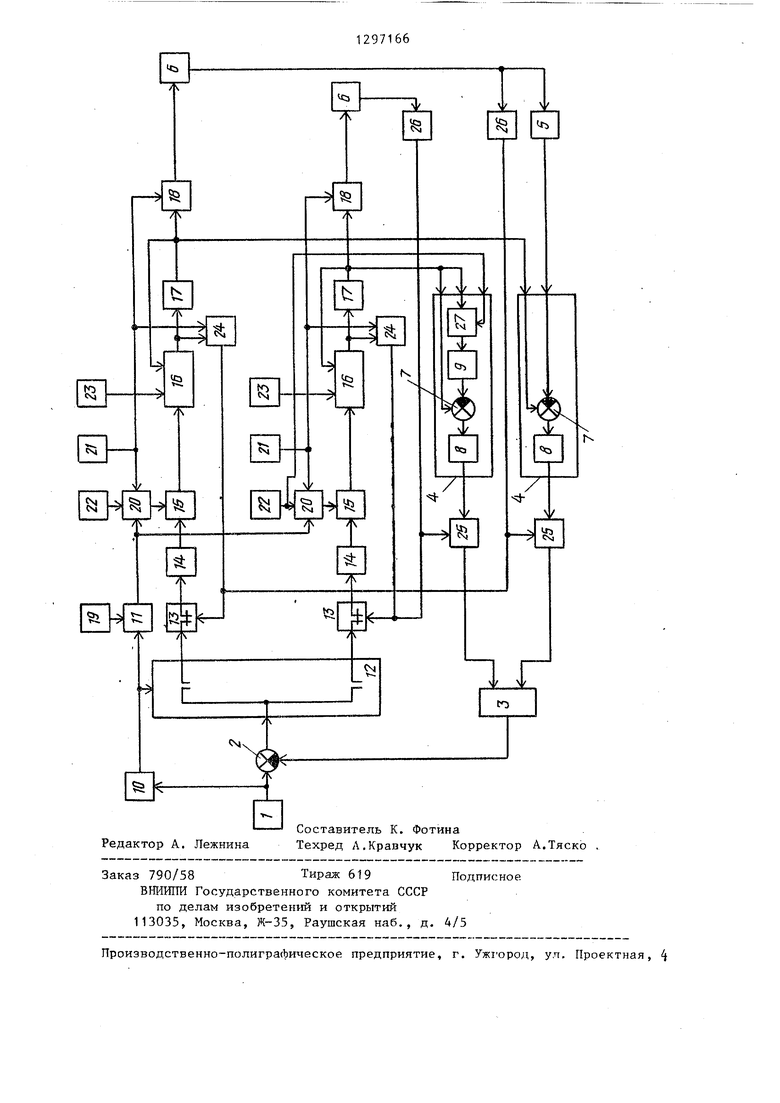
На чертеже представлена блок-схе- 0сигнала ), равного дР(С), формима устройства, реализующего предла-рует на своем выходе сигнал пострян-
гаемый способ.ной амплитуды, которьй снимает при
Устройство содержит орган 1 изме-обнулении сигнала (t) на ее входе: рения фактического отклонения регулируемого параметра, элемент 2 форми- 5 8(t)0 при &P(t) О
рования упрежденного отклонения регу- ,. „ т, п (П
при (,) и
лируемого параметра СРП), сумматор 3, °
блок 4 формирования обратной переход- Счетчик 11 при наличии на первом ной функции соответствующей электро- отличного от нуля сигнала станции, датчик 5 фактической мощное- 20 . заданньп интервалом времени, ти соответствующей электростанции,например 1 с, производит пошаговое регулятор 6 мощности соответствующейступенчатое уменьшение сигнала (t) электростанции, элемент 7 вычитанияпоступающего на второй вход счетчика, соответствующей электростанции, усили-„ величину, пропорциональную 1 с. тель 8 с коэффициентом, равным коэффи-формируемый указанным образом сигнал циенту влияния изменения мощности со-„вляется выходным сигналом счетчика ответствующей эле1 тростанции на регу- .. g (). При достижении амплитудой лируемый параметр, блок 9 с передаточ- игнала (t) наперед заданного мини- ной функцией, моделирующей переходной„ального начения счетчик сохраняет процесс автоматического изменения минимальной амплиту- ности соответствующей электростанции, р существования отлич- при изменении ей задания, схему 10„ сигнала (t) „ при сиг- запуска, счетчик 11 оставшегося време- (), равном нушо, производит ни регулирования, коммутатор 12 кана-„гновеиньш возврат амплитуды выходно- лов электростанций, прерьтатель 13 ка-35 к значению, равному сигна- нала соответствующей электростанции,), т.е. сигналу, пропорцио- усилитель 14 с коэффициентом усиления, i9 , J-V, о D 1-т V. лис.ч и, у tнальному заданному времени регулирообратнр пропорциональным коэффициенту
в ания.
влияния изменения мощности соответствующей электростанции на регулируемый 40 с с,- .- п
остаб Р J
параметр, управляемый ограничитель асю-о.
15 соответствующей электростанции, - ч t Т
блок 16 ограничения соответствующей ге тав при &Р(С); О (2)
электростанции, запоминающий сумматор и t - t : т
17 соответствующей электростанции, 45
ограничитель 18 TeMiia задания соот- ц ри bP(t)0
ветствующей электростанции, задатчик
19времени регулирования, умножитель Коммутатор 12 при отличном от нуля
20соответствующей электростанции,сигнале е,о() на втором входе с за- задатчик 21 допустимой скорости изме- 50 данным циклом повторения, например нения задания соответствующей электро-1 с, производит последовательное (по- станции, задатчик 22 времени запаз-очередное) замыкание-размыкание п дьшания регулятора и времени транс-своих контактов, где п - общее коли- портного запаздывания канала связичество РЭС. В исходном состоянии
и соответствующей электростанции, за- 55 (сигнал 8(t) равен нулю или произош- датчик 23 максимально и минимальноло его обнуление) все контакты комму- допустимой мощности соответствуклцейтатора находятся в разомкнутом сое- электростанции, схему 24 управлениятоянии и коммутатор подг отовлен к за- соответствующей электростанции, преры-мыканию начиная с первого и кончая
3124
последним контактом, В любой текущрш момент времени в замкнутом состоянии может находится только один контакт. Это означает, что перед замыканием очередного контакта предварительно размыкается контакт, замкнутьш ранее. Полное время последовательного замыкания-размыкания всех п контактов с учетом возврата ..коммутатора в исходное состояние должно укладываться внутри заданного цикла повторения, например 1 с. Коммутатор осуществляет замьшание-размыкание своих контактов в строгой последовательности: первьй.
второй, третий и т.д., п-й. Изменение f5 дания соответствующей РЭС в момент,
очередности замыкания каналов электростанций осуществляется путем физического переприсоединения канала соответствующей РЭС к соответствующему контакту коммутатора нения программируемого Коммутатора последовательность замыкания-размыкания контактов коммутатора может задаваться программным путем, при этом физическое присоединение кана лов РЭС 25 сохраняется неизменным.
Прерыватель 13 размыкает цепь прохождения сигнала ) пропорционального (t), на вход усилителя 14
предшествующий замыканию канала этой электростанции (Z. (t)).
Запоминающий сумматор 17 осуществляет одноразовое суммирование к теВ случае приме-20 кущему значению сигнала ,,.(t), пропорционального Z.(t), сигнала С (t) пропорционального &Z. ft.t, ), поступившего на его вход при замыканий канала соответствующей электростанции, и запоминает новое значение сигнала „. (t), пропорционального Z.(t+At) ifa все время до поступления на его
e,,.(t)
невход нового значения сигнала
. « i отличного от нуля, u,t- - время.
на все время существования на втором 30 обходимое для формирования прираще- входе прерывателя 13 отличного от ну- ния задания (лЬ) i-й электростан- ля сигнала „, (t) или ойД)- При
,. (t) или . нулевом значении указанных сигналов прерыватель 13 обеспечивает коммутацию (замыкание) указанной цепи.
ции на выходе сумматора 17.
Ограничитель 18 осуществляет формирование (разворот во времени) при- 35 ращения сигнала , .(t) со скоростью, задаваемой задатчиком 21. Таким образом, сигнал на выходе запоминающего сумматора 17 изменяется скачком на
Усилитель 14 производит усиление входного сигнала ,,.(:), пропорционального дР (t), обратно пропорционально козЛфициенту влияния изменения мощности соответствующей РЭС на ре- гулируемьй параметр:
F ЛР1)
It V
i45
Управляемый ограничитель 15 осуществляет ограничение амплитуды входного сигнала (ее абсолютного значения) ,. (-) ДО величины сигнала .()
М,2Л, ,„
поступающего на второй вход управляе-- мого ограничителя 15 с выхода умножителя 20:
35
55
(t)
лР
.1 при
i
IS (t)Ue,.,(t)
м
,s.(t) ao(t) SIGNCe, (t) (4) 11 i
при
I.Xt)|.
(t)
Блок 16 осуществляет ограничение амплитуды входного сигнала f.Ct) в соответствии с условием:
НИНтлакс
5 Ч )п ( -,.,.
. мин
(t),f,,, (t)
где t,,. (.c;,-33i () сигналы, посту- пакяцие с выхода задатчика 23, пропорциональные максимально и минимально допустимой мощности соответствующей РЗС.
(-„. (t) - сигнал, поступающий с выхода запоминающего сумматора 17, про- порциональньй текущему значению заe,,.
вход нового значения сигнала
. « i отличного от нуля, u,t- - время.
обходимое для формирования прираще- ния задания (лЬ) i-й электростан-
ции на выходе сумматора 17.
Ограничитель 18 осуществляет форирование (разворот во времени) при- ращения сигнала , .(t) со скоростью, задаваемой задатчиком 21. Таким образом, сигнал на выходе запоминающего сумматора 17 изменяется скачком на
величину сигнала ,. (t), пропорционального .Z . (&t ), а на выходе ограничителя 18 сигнал .,8.() изменяется на величину сигнала дг(лЦ ), линейного во времени со скоростью, мой задатчиком 21.
задавае
,„
С помощью задатчика 19 устанавливается сигнал f.,g (t) пропорциональный заданному времени регутшрования
Т Per.
Умножитель 20 осуществляет суммирование сигнала С) пропорционального времени запаздьшания регулятора мощности соответствующей электростанции, с сигналом - () 5 пропорциональнът времени транспортного запаздывания канала связи этой электростанции, полученную сумму вычитает из сигнала е ,( -) пропорционального оставшемуся времени регуливышает или равен наперед заданному минимальному положительномл значению, то полученную разность умножает на сигнал (t), пропорциональньй допустимой скорости изменения задания соответствующей РЭС, в противном случае умножает сигнал i, (t) на указанное минимальное значение:
t)v, t,, -(Tf.r;) при t, -() Cts,.
- (t)v,-tri,, пpиt,-(7;.t;)
:t
остлв. 1
вход блока 9 на время, пропорциональное сигндлу С,. (t), поступающему от задатчика 22.
с Устройство работает следующим образом.
При возникновении в момент времени t отличного от нуля отклонения РП, &P(t)/0, схема 10 вырабатьтает сиг- 10 нал f,(,(t), который снимается только при достижении сигналом iiP(t) нулевого значения. При поступлении управляющего сигнала вход коммутатора 12 последний с заданным цик- (6) f5 лом повторения (например, 1 с) произС помощью задатчика 21 устанавли- вается сигнал аД), пропорциональный допустимой скорости изменения задания соответствующей РЭС.
водит поочередное замыкание-размыкание своих контактов. В течение одного цикла работы (1 с) коммутатор обеспечивает поочередное замыкание-размыкаС помощью задатчика 22 устанавли- 20 ие всех своих контактов:от первого ваются сигнал „.() пропорцио- до п-го, где п общее количество РЭС,
нальныи времени . запаздывания регуля- Полное время замыкания-размыкания, тора мощности соответствуютцей электро- всех и контактов с учетом времени станции ( L ), и сигнал Е. (t), на возврат,, коммутатора в исходное пропорциональньй времени транспортно-25ц
го запаздывания .канала связи этой состояние. ,11,д1 -1. Такая работа
. 1 1
электростанции с регулятором параметра энергосистемы (t ),
С помощью задатчика 23 устанавливаются сигналы
2Jl
(t)
и гГГ (t)
I
коммутатора 12 продолжается в течение
всего времени, пока на его входе су- 30 шествует отличный от нуля управляющий сигнал ,o(t). При исчезновении сигнала о (t:) коммутатор 12 прерывает свою работу и возвращается в исходное состояние, т.е. готов к замыпропорциональные максимально и минимально, допустимой мощности соответствующей РЭС.
Схема 24 при появлении на втором
входе сигнала e,5.(t), отличного от кан кю первого контакта. нуля, устанавливает на своем вьпсоде При поступлении на второй вход сигнал постоянной амплитуды на время, счетчика 11 сигнала ,о отличного определяемое как частное от деления от -нуля, последний с заданным интерва- абсолютного значения сигнала ,, . (t) лом времени, равным циклу коммутатора
f 1
на сигнал f,, (t), поступающий на /JO 12, например 1 с осуществляет ступен- первый вход схемы с выхода задатчи- чатое уменьшение амплитуды сигнала ка 21.,По истечении указанного време- ,ни сигнал на выходе схемы управления снимается.
Прерыватель 25 при отличном от нуля сигнале е . (-) размыкает цепь между выходом соответствующего блока 4 и соответствующим входом сумматора 3, при отсутствии сигнала от датчика 26 обеспечивает постоянную коммутацию указанной цепи.
Датчик 26 формирует на своем выходе сигналы постоянной амплитуды при неисправности регулятора мощнос,з(Ь), поступающего на его второй вход. Это означает, что один раз в секунду амплитуда сигнала е, (t)
45 уменьшается ступенчато на величину, пропорциональную одной секунде..При достижении амплитудой сигнала наперед заданного минимального значения счетчик 11 сохраняет сигнал
50 .,.,(t) минимальной амплитуды на в.есь период времени, пока не будет снят сигнал .,g(t). При отсутствии или снятии сигнала ) счетчик 11 возвращается в исходное состояние и
ти и тракта управления с соответст- 55 на его выходе существует сигнал ,Дь) вующей РЭС. В противном случае сиг- равный по амплитуде сигналу .,j (t),
которьй, в свою очередь, пропорционален заданному времени регулирования Т.„, .
нал на выходе датчика отсутствует.
Управляемая схема 27 осуществляет задержку во времени прохождения сигводит поочередное замыкание-размыкание своих контактов. В течение одного цикла работы (1 с) коммутатор обеспечивает поочередное замыкание-размыкаI
коммутатора 12 продолжается в течение
всего времени, пока на его входе су- 30 шествует отличный от нуля управляющий сигнал ,o(t). При исчезновении сигнала о (t:) коммутатор 12 прерывает свою работу и возвращается в исходное состояние, т.е. готов к замы/JO 12, например 1 с осуществляет ступен- чатое уменьшение амплитуды сигнала
,з(Ь), поступающего на его второй вход. Это означает, что один раз в секунду амплитуда сигнала е, (t)
45 уменьшается ступенчато на величину, пропорциональную одной секунде..При достижении амплитудой сигнала наперед заданного минимального значения счетчик 11 сохраняет сигнал
50 .,.,(t) минимальной амплитуды на в.есь период времени, пока не будет снят сигнал .,g(t). При отсутствии или снятии сигнала ) счетчик 11 возвращается в исходное состояние и
Рассмотрим случай возникновения ступенчатого отклонения РП, йР( -, ) О в момент времени t. Предположим, что последовательность замыкания-разыкания каналов РЗС соответствует их физическим номерам. На первом цикле работы коммутатор 12 замыкает сна- чала канал первой РЭС, в результате чего на входе усилителя 14 первой РЭС появляется сигнал дР (t, ), кото- рьй в этот момент времени равен AP(t ), Усилитель 14 производит увеличение амплитуды входного сигнала в 1/К раз. Таким образом, на выходе усилителя 14 возникает сигнал:
f (t ) .
«, - 1 к
(7)
т.е. сигнал, соответствующий требуемому приращению мощности первой РЭС для полного подавления сигнала лР (t ). Сигнал . С .) поступает на
т-1П J .
вход управляемого ограничителя 15 первой РЭС. На второй вход этого ограничителя поступает сигнал (t ), который сформирован умножителем 20 первой РЭС:
.0,
(t. ) Л t,.,-( r) (8)
Управляемый ограничитель 15 производит ограничение амплитуды входного сигнала f (t ) до значения, задаваемого умножителем 20 с сохранением знака сигнала 8.. (t, ), т.е. до значеЧ ния допустимого приращения задания
первой РЭС. Сигнал с выхода управляемого ограничителя 15 поступает на первый вход блока 16 первой РЭС, ко-, торый при необходимости ограничивает
амплитуду входного сигнала в соответствии с условием:
.(«ЙН
(Ч)
40
;i:ct.).E,(t,He,,(t,)-(o-(9)
СигналыС„, (Ц ) ) постуОписанная процедура в течение ного цикла работы коммутатора 12 должается до тех пор, пока сигнал e,(t, +at), равньй ip(t,+&t), не достигнет нулевого значения .при и
-23, -1 - -гз, .. v-ijr пают в блок 16 с выхода задатчика 23, HeHnii задания, например, К-й РЭС. (t,) а сигнал ( i,) - с выхода запоминающего суг атора 17 первой РЭС. Таким образом, на выходе блока 16 возникает сигнал; 6 (Ч;) удовлетворяю / п
щий условию (8) и дополнительным ограничениям, предусмотренным условием (9).
Запоминающий сумматор 17 первой РЭС производит суммирование сигнала
(t), возникщего на его входе, к текущему значению сигнала ., (t, ) пропорциональному текущему значению задания первой РЭС в момент времени
50
Для остальных п-К РЭС при продолж щейся работе коммутатора 12 прира ния задания не произойдет в силу
дР (t, +ut;) 0.
при появлении на выходе запоми щих сумматоров 17 соответствующих РЭС приращений заданий ограничите 18 этих РЭС начинают изменять сиг „ лы на своих выходах со скоростью, определяемой задатчиками соответс вующих РЭС. Изменение сигналов на ходах ограничителей 18 происходит с заданной скоростью до вьфавнина
O
t, . Сигнал f () с выхода запоминающего сумматора 17 поступает на один из входов элемента 7 первой РЭС, который формирует на своем выходе сигнал
е () Z, (t,) +лг, () - К (t, )(10)
Для электростанций, у которых отсутствует датчик фактической мощности, сигнал ., () поступит на
вход блока 9 с задержкой во времени, задаваег ой задатчиком 22, в результате чего сигнал на выходе блока 9 начнет изменяться с задержкой, соот- 5 ветствующей запаздыванию канала связи этой РЭС. Сигнал
0
(tj + it) через усилитель 8, прерьгаатель 25 и сумматор 3 поступает на вход элемента 2, в результате чего на выходе последнего сформируется сигнал
ea(C)..( t -N; ti r
Z;(t)-N,(t,)K,
(4i;
Одновременно схема 24 управления первой РЭС сформирует управляющий сигнал fj (t + ut), по которому пре- рьгеатель 1з разомкнет канал первой РЭС.
Коммутатор 12 произведет размыкание канала первой РЭС и замыкание канала второй РЭС. В результате аналогично описанному будет сформировано приращение задания второй РЭС, а сигнал на выходе элемента 2 а
,(i,)uP(t,)-Oi.ujtu7;(utp-N.(ViKiI-
(t,)-N.(t,)K.
(12)
40
Описанная процедура в течение одного цикла работы коммутатора 12 продолжается до тех пор, пока сигнал e,(t, +at), равньй ip(t,+&t), не достигнет нулевого значения .при изме-
HeHnii задания, например, К-й РЭС.
HeHnii задания, например, К-й РЭС.
Для остальных п-К РЭС при продолжающейся работе коммутатора 12 приращения задания не произойдет в силу
дР (t, +ut;) 0.
при появлении на выходе запоминающих сумматоров 17 соответствующих РЭС приращений заданий ограничители 18 этих РЭС начинают изменять сигна- лы на своих выходах со скоростью, определяемой задатчиками соответствующих РЭС. Изменение сигналов на выходах ограничителей 18 происходит с заданной скоростью до вьфавнинания
сигнала на выходе ограничителя с сигналом ,j.(tg+ t)j поступающим на его вход.
Таким образом, уже на первом цикле работы коммутатора 12 будут сформированы приращения заданий такому количеству РЭС и на такую сумг.1арную величину, которая необходима для подавления возникшего отклонения РП за заданное время регулирования Т pg . На следующем цикле работы (через 1 с) коммутатор 12 снова начинает осуществлять последовательное замыкание каналов РЭС начиная с первой электро12
станции. Для РЭС которым было сфор- J5 этом случае произойдет как для РЭС,
мировано приращение задания на предшествующем цикле, из-за прерьшателей 13, получающих сигнал от соответствующих схем 24, каналы останутся разомкнутыми. Для РЭС, которым не сфор- д ватзли 13 восстановили каналы этих мировано приращение заданий на пред- РЭС). В результате процесс подавления шествующем цикле, будет производиться замыкание их каналов, однако в силу равенства нулю лР (t течение всего процесса регулирования этим 25 РЭС также не будет сформировано приращение заданий.
Из-за различия величин сформированных приращений заданий и допустимых скоростей изменения мощности РЭС,30 ходной функции этой электростанции, время восстановления каналов электро- сигнал e(t) станет отличным от ну- станций схемами 24 управления через прерыватели 13 будет различно, однако в силу равенства нулю сигнала ДР (t)
отклонения РП с учетом дополнительного возмзпдения также будет завершен за заданное время регулирования.
Ес11и в процессе отработки приращения задания регулятор мощности какой-либо РЭС вышел из работы, то по сигналу от датчика 26 прерыватель 25 разорвет цепь сигнала обратной переля и через коммутатор 12 будет изменено задание необходимому количеству РЭС, которые обеспечат подавление
в течение процесса регулирования этим возникшего внутреннего возмущения электростанциям также не сфор- в системе регулирования за оставшееся мировано дополнительных приращений время регулирования. При этом с помо- заданий. Фактическое изменение мощности , получивших приращение защью прерывателя 13 этой РЭС исключается возможность формирования придания, приведет к нулю возникшее отклонение РП. Схема 10 снимет управляющий сигнал и коммутатор 12 вернется в исходное состояние - процесс подавления отклонения РП завершится.
При возникновении в течение задан-45 ния соответствующей РЭС прерьгоатель кого времени регулирования дополни- 13 разрывает цепь прохождения сигна- тельных возмущений в энергосистеме, ла с выхода коммутатора 12 на вход в результате которых лР « станет усилителя 14 зтой электростанции на отличным от нуля, например, в момент
все время неисправности тракта управвремени t на выходе счетчика 11 будет су1чествовать сигнал, пропорцио- нальньй оставшемуся времени регулирования: e,,(t,) Тр - ( t, ) .
В результате умножители 20 соответствующих РЭС сформируют на своих выходах сигналы, пропорциональные величинам допустимого приращения заданий соответствующим РЭС в момент вре10
мани t
Управляемые ограничители 1 Ь соответствующих РЭС произведут ограничение амплитуды входного сигнала (2 Д° значения, задаваемого сигналом (tj).Таким образом,через коммутатор 12,который продолжает работать в силу отличного от нуля сигнала PCt),будет произведено изменение заданий некоторому дополнительному количеству РЭС,в результате чего сигнал (t2+ t ) опять станет равным нулю, а вновь сформированные приращения заданий будут удовлетворять условиям (8) и (9). Изменение заданий в
не получавших ранее приращений заданий, так и для РЭС, ограничители темпа задания которых произвели обработку предшествующих приращений (прерыватзли 13 восстановили каналы этих РЭС). В результате процесс подавления
ходной функции этой электростанции, сигнал e(t) станет отличным от ну-
отклонения РП с учетом дополнительного возмзпдения также будет завершен за заданное время регулирования.
Ес11и в процессе отработки приращения задания регулятор мощности какой-либо РЭС вышел из работы, то по сигналу от датчика 26 прерыватель 25 разорвет цепь сигнала обратной переходной функции этой электростанции, сигнал e(t) станет отличным от ну-
ля и через коммутатор 12 будет изменено задание необходимому количеству РЭС, которые обеспечат подавление
возникшего внутреннего возмущения в системе регулирования за оставшееся время регулирования. При этом с помо-
щью прерывателя 13 этой РЭС исключается возможность формирования приращения задания на все время существования сигнала неисправности регулятора мощности этой РЭС.
При поступлении от датчика 26 сигнала о неисправности тракта управления соответствующей РЭС прерьгоатель 13 разрывает цепь прохождения сигна- ла с выхода коммутатора 12 на вход усилителя 14 зтой электростанции на
все время неисправности тракта управления.
При регулировании параметров энергосистемы с периодом колебаний 10- 15 мин и более, значение допустимой скорости изменения задания тепловым
электростанциям выбирают с целью минимизации расхода топлива в переходных режимах работы энергоблоков при условии отработки этой скорости без ув§1112
личивающегося во времени запаздывания. При регулировании колебаний с периодом меньшим 10 мин, значение допустимой скорости задают максимально возможньпуг по условиям текущих о г- раничений по температурным напряжениям в металле ротора турбины.
Ф. ормула -изобретения
1. Способ автоматического регули- рования параметров энергосистемы, заключающийся в формировании упр&в- ляющего воздействия на задание мощности или относительного прироста регулирующих электростанций в функции упрежденного отклонения регулируемого параметра, причем для формирования упрежденного отклонения регулируемого параметра определяют значение мощности каждой электростанции, для каж- дои электростанции определяют разность между текущей величиной ее управляющего воздействия и определенной мощностью, полученную разность умножают на коэффициент влияния из- менения мощности соответствующей электростанции на регулируемый параметр, су 1мируют полученные произведения .и изменяют текущее отклонение регулируемого параметра на величину
суммы полученных произведении, взятой с отрицательным знаком, и полученный сигнал используют в качестве отклонения регулируемого параметра, отличающийся тем, что, с це- лью повыщения надежности и экономичности, задают время регулирования отклонения параметра, для каждой электростанции задают или определяют текущее значение допустимой скорости изменения задания, при которой электростанция обеспечивает изменение своей мощности без запаздывания или с постоянным запаздыванием, не увеличивающимся во времени, и величину за- паздывания отработки, определяемую суммированием запаздывания регулятора мощности электростанции и запаздывания приемо-передающей аппаратуры канала связи этой электростанции с регулятором параметра энергосистемы, задают последовательность формирова
5 0
0
5 0 5 0
6612
ния текущих приращентЧ управляющих воздействий регулирующим электростанциям, для каждого текущего момента регулирования определяют оставшееся время регулирования, как разность между заданным временем регулирования и временем, прошедшим с момента начала регулирования, и в соответствии с заданной последовательностью в случае отличного от нуля упрежденного от - отклонения регулируемого параметра, для каждой электростанции определяют требуемое приращение задания как отношение упрежденного отклонения регулируемого параметра к коэффициенту влияния изменения мощности электростанции на регулируемый пар.аметр, определяют допустимое приращение задания, как произведение допустимой скорости изменения задания электростанции на разность между оставшимся временем регулирования и величиной за- - паздывания отработки этой электростанции, и изменяют управляющее воздействие этой электростанции на величину, равную меньшему по абсолютной величине из этих приращений, взятую со знаком требуемого приращения задания, причем, следующее приращение управляю- . щего воздействия электростанции производят через время, определяемое как. отношение абсолютного значения последнего сформированного приращения к величине допустимой скорости изменения задания этой электростанции.
2. Способ ПОП.1, отличающийся тем, что, с целью повьппе- ния точности и надежности процесса регулирования, контролируют исправность тракта управления и процесс автоматического изменения мощности электростанции под воздействием управления и в случае невыполнения задания, исключают разность между текущей .еличиной управляющего воздействия и определенной мощностью соответствующей электростанции из формирования упрежденного отклонения регулируемого параметра, а при неисправности тракта управления не формируют приращение управлякщего воздействия соответствующей электростанции.
Редактор А. Лежнина
Техред Л.Кравчук Корректор А.Тяско ,
Заказ 790/58Тираж 619 Подписное
ВНРПШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
- -- - ------. -™ . «в .|..Ш1««..«,..|.,.ш« ,,и -.«..«, -,в«™« -.-.в-.™,в.™. „.„, ,,
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования перетоков мощности | 1988 |
|
SU1697182A1 |
| Способ автоматического регулирования параметров энергосистемы | 1986 |
|
SU1467664A1 |
| Способ автоматического регулирования перетоков активной мощности | 1990 |
|
SU1793513A1 |
| Способ автоматического регулирования перетока мощности межсистемной электропередачи | 1989 |
|
SU1809490A1 |
| Способ автоматического ограничения перетока мощности электропередачи | 1990 |
|
SU1823069A1 |
| Способ автоматического регулирования активной мощности энергосистемы | 1989 |
|
SU1735965A1 |
| Способ автоматического ограничения перетоков мощности электропередач | 1990 |
|
SU1778861A1 |
| Устройство для автоматического регулирования частоты и перетока активной мощности энергообъединения | 1983 |
|
SU1136250A1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1774431A1 |
| Способ автоматического регулирования перетоков мощности между двумя энергосистемами | 1988 |
|
SU1647760A1 |
Изобретение относится к области электроэнергетики.Цель изобретения - повьше йие надежйости, экономичности и точности. Указанная цель достигнута в результате того, что приращение управляющих воздействий регулирующим электростанциям (Э) формируют в пределах, обеспечивающих отработку каждой Э, указанных приращений в течение заданного интервала времени, отсчитываемого с момента возникновения отклонения регулируемого параметра. Ограничение амплитуды приращения управляющего воздействия производят с учетом индивидуальных динамических характеристик Э: допустимой скорости изменения мощности Э, времени запаздывания приемо-передающей аппаратуры канала связи Э с регулятором параметра энергосистемы и времени запаздывания регулятора мощности электростанции. Формирование приращений управляющих воздействий Э осуществляют последовательно во времени в соответствии с выбранной очередностью, что позволяет достаточно просто применять широкое разнообразие критериев оптимального управления путем изменения очередности формирования указанных приращений. 1 з.п.ф-лы, 1 ил. с S (О
| Способ автоматического регулирования перетока активной мощности по слабой линии межсистемной связи | 1969 |
|
SU505085A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического регулирова-Ния пАРАМЕТРОВ эНЕРгОСиСТЕМы | 1979 |
|
SU843091A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
