Изобретение относится к электрическим машинам, в частности,.к исполнительным электродвигателям систем автоматики.
Целью изобретения является расширение функциональных возможностей путем обеспечения вращения ротора относительно трех осей.
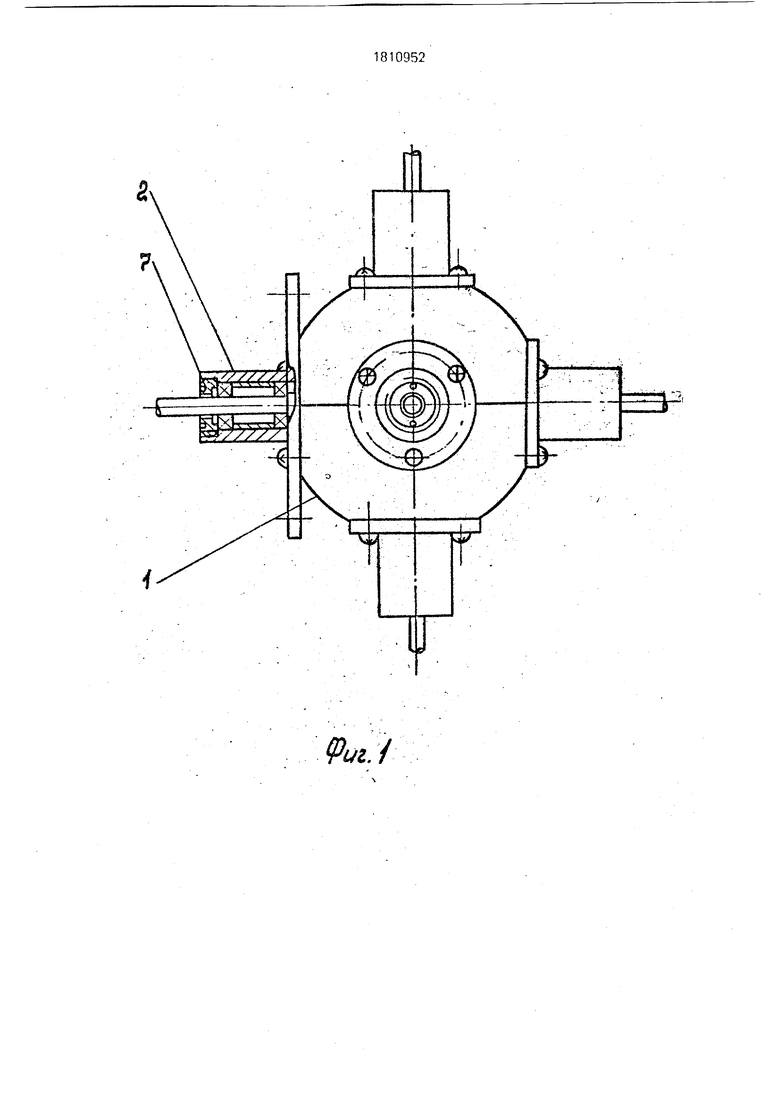
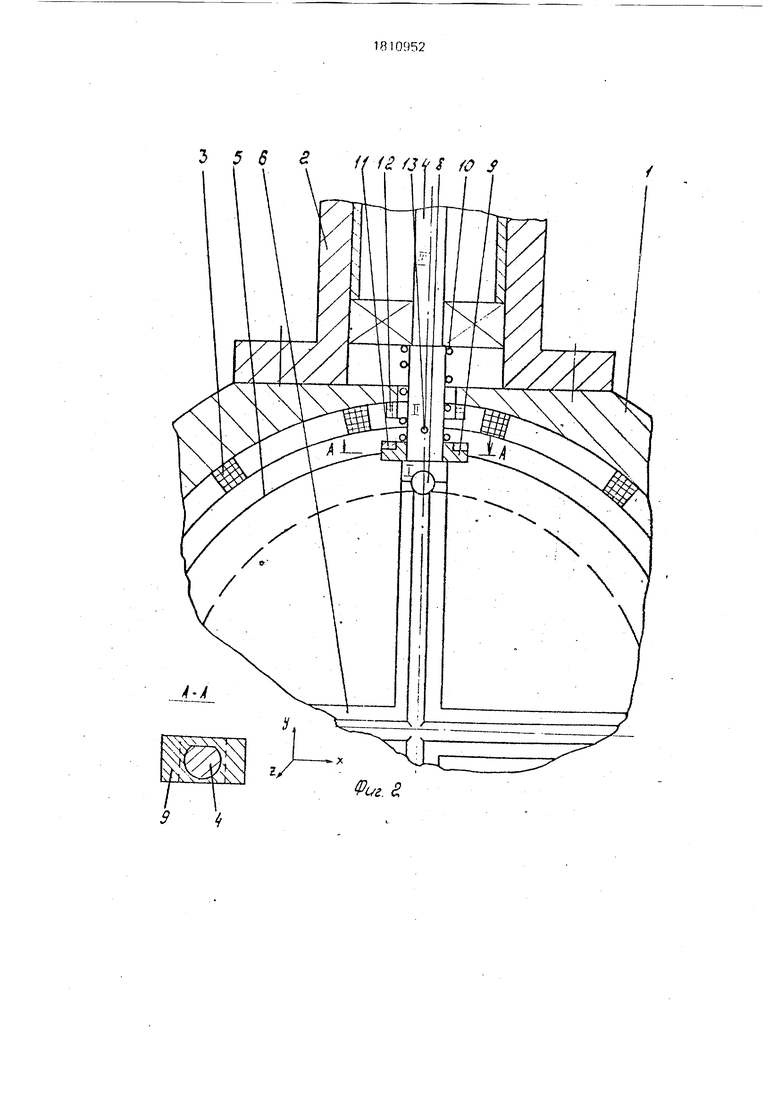
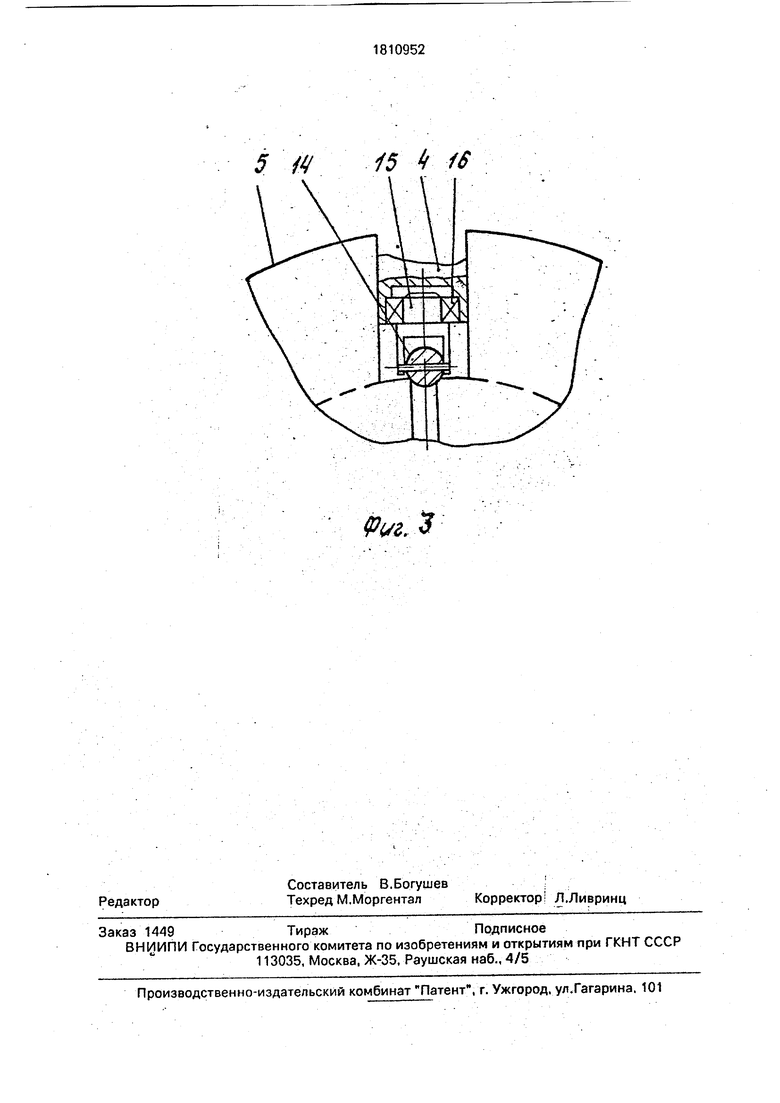
На фиг.1 изображен предлагаемый микроэлектродвигатель; на фиг.2 - конструкция опоры электродвигателя; на фиг.З - вариант опоры электродвигателя.
Микроэлектродвигатель состоит из следующих основных элементов: ферромагнитного корпуса 1 из двух симметричных частей, скрепляемых посредством подшипниковых втулок 2. Одна из шести подшипниковых втулок имеет увеличенный фланец с дополнительными отверстиями для крепления электродвигателя в устройствах. На внутренних поверхностях корпуса 1 выполнены пазы для -размещения трех взаимно перпендикулярных обмоток 3 электродвигателя. Внутри корпуса 1 в шести опорах 4 установлен ротор 5 с тремя взаимно перпендикулярными и диаметрально расположенными кольцевыми канавками 6, На роторе 5 с обеих сторон кольцевых канавок 6 вклеены магниты, или при выполнении ротора из магнитного материала намагничены полюсы чередующейся полярности (на фиг.1 не показаны). Опоры 4 представляют собой ступенчатые валы, установленные в шести подшипниковых втулках 2. Положение опор 4, а следовательно., положение ротора регулируется с помощью крышек 7, имеющих резьбовые соединения со втулками 2. Опоры 4 состоят из трех частей (см.фиг.2):
00
Jt
о ю ел ю
I - входящая в канавку ротора и имеющая квадратное или круглое сечение, соответствующее ширине канавок;
II - круглого сечения с лыской;
III - круглого сечения, служит валом электродвигателя.
Каждая из опор 4 со стороны ротора оканчивается шариком 8, входящим в дорожку качения ротора. На части II каждой опоры 4 установлены направляющие 9, которые входят в соответствующие кольцевые канавки ротора и прижимаются пружинами 10. На направляющих 9 закреплены кольце вые магниты 11, которые под действием электромагнитов 12, установленных в корпусе 1, могут в зависимости от направления тока в электромагнитах 12 перемещать направляющие 9 вдоль опор до закрепления фиксатором 13 вне канавок 6 ротора или сниматься с фиксатора и возвращаться в исходное положение.
На фиг.З показан вариант- опоры, в которой для уменьшения момента сопротивления вращению ротора 5 установлен подшипник скольжения 1.4 сферической формы в вилке. 15, установленной в опоре 4 на подшипнике качения 16. Вместо подшипника скольжения 14 может быть установлен подшипник качения.
Принцип действия микроэлектродвигателя / см.фиг.2/ заключается в следующем. При подаче напряжения на одну из трех взаимно перпендикулярных обмоток 3 статора ротор 5 начинает вращаться в том же направлении, что и вращающееся магнитное поле. При этом происходит качения ротора по двум парам взаимно перпендикулярных опор 4. Направляющие третьей пары.опор 4, захватываются боковыми гранями кольцевой канавки 6 ротора 5, и эта пара опор приводится во вращение. Исходное положение ротора 5 при изменении оси вращения - опоры 4 находятся на пересечениях канавок 6. Исходное положение направляющих:
- направляющие опоры Х- параллельно оси Z:
- направляющие опоры Y - параллельно оси X;
- направляющие опоры 2 - параллельно оси Y.
Их положение относительно канавок 6:
- при вращении относительно оси X на- правляющиеопорХи2-в канавках, Y- вне канавки;
- при вращении относительно оси Y направляющие опор X и Y.- в канавках, Z-вне канавки;
- при вращении относительно оси Z направляющие опор Y и Z - в канавках, X - вне канавки.
Так как для изменения оси вращения микроэлектродвигателя необходимо приводить ротор в исходное положение, микроэлектродвигатель может найти преимущественное применение в устройствах, которые имеют фиксированное конечное положение приводимых в движение
механизмов, соответствующее исходному положению ротора. Иначе неизбежно усложнение системы управления электродвигателем, связанное с уста.новкой датчиков положения ротора.
Формула изобретения
Микроэлектродвигатель, содержащий статор с двумя взаимно перпендикулярными обмотками, ротор, установленный в опорах внутри корпуса, жестко связанных с
валами, размещенными в корпусе посредством подшипников и входящими в две взаимно перпендикулярные и диаметрально расположенные кольцевые канавки ротора, отличающийся тем, что, с целью
расширения функциональных возможностей путем обеспечения вращения относительно трех осей ротора, на статоре размещена третья обмотка, перпендикулярная двум имеющимся, на роторе выполнена
третья диаметрально расположенная и перпендикулярная первым двум кольцевая канавка и установлены две дополнительные опоры, входящие в третью кольцевую канавку, а по меньшей мере три опоры, расположенныенатрех взаимно перпендикулярных осях, снабжены направляющими, установленными с возможностью осевого перемещения до выхода из упомянутых кольцевых канавок.
Риг./
5 М 15 4 1S
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроэлектродвигатель | 1988 |
|
SU1628138A1 |
| ОДНОПОТОЧНЫЙ ЧЕТЫРЕХСТУПЕНЧАТЫЙ ТУРБОМОЛЕКУЛЯРНЫЙ НАСОС | 2014 |
|
RU2560133C1 |
| ТУРБОМОЛЕКУЛЯРНЫЙ НАСОС С ОДНОПОТОЧНОЙ ТУРБОМОЛЕКУЛЯРНОЙ ПРОТОЧНОЙ ЧАСТЬЮ | 2012 |
|
RU2490519C1 |
| АКСИАЛЬНЫЙ ЦЕНТРОБЕЖНЫЙ ДВИГАТЕЛЬ-НАСОС | 2007 |
|
RU2343318C1 |
| ОСЕВОЙ ГЕРМЕТИЧНЫЙ ТОПЛИВОПЕРЕКАЧИВАЮЩИЙ АГРЕГАТ | 2022 |
|
RU2791799C1 |
| ЦЕНТРОБЕЖНЫЙ ХЛАДОНОВЫЙ КОМПРЕССОР | 2021 |
|
RU2783056C1 |
| Мотор-колесо транспортного средства | 2023 |
|
RU2813165C1 |
| ПОГРУЖНОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2007 |
|
RU2343619C1 |
| УПЛОТНЕНИЕ ВАЛА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2314623C1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 2005 |
|
RU2365488C2 |
Использование: исполнительные двигатели систем автоматики. Сущность изобретения: на статоре микроэл ктродвигателя размещены две взаимно перпендикулярные обмотки. Ротор установлен внутри корпуса в жестко связанных с валами опорах. Валы входят в две вза имно перпендикулярные и диаметрально расположенные кольцевые канавки ротора. На статоре размещена перпендикулярно двум имеющимся третья обмотка. На роторе установлены две дополнительные опоры и выполнена третья кольцевая канавка. Дополнительные опоры входят в кольцевую канавку. По меньшей мере на трех взаимно перпендикулярных опорах установлены направляющие с возможностью осевого перемещения до выхода из кольцевых канавок. 3 ил.
РМ,3
| Брускин Т.Э | |||
| и др | |||
| Электрические машины и микромашины | |||
| - М.: Высшая школа, 1986 | |||
| Микроэлектродвигатель | 1988 |
|
SU1628138A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
