Изобретение относится к области регулировання турбии для повышения устойчивости энергосистем.
Известный способ регулирования по абсолютному углу и его первой и второй производным имеет ряд существенных недостатков: необходимость телепередач или радиопередач для передачи к агрегатам эталонного вектора напряжения, единого для всей системы; возможность неправильного регулирования в случае, если в системе имеется часть с дефицитом генерирующей мощности, получающая от остальной части системы энергию по линии со слабой связью; при пабросе нагрузки в дефицитпой части системы он будет покрываться генераторами остальной части системы, имеющими резерв, что может привести к перегрузке линии со слабой связью и нарущению ее устойчивости.
Предлагаемый сиособ не требует теленередачн эталонного вектора, так как параметр регулирования выявляется иеносредствепио па станции. Полностью или частично исключена возможность неправильного регулирования благодаря специальной настройке измерительного органа системы регулнрования. В остальном предлагаемый способ аналогичен методу регулирования по абсолютному углу и обладает его достоинствами в части обеснечеиия УСТОЙЧИВОСТИ.,
Предлагаемый способ регулирования паровых турбин предусматривает управление сервомоторами, определяющими положение клапанов турбины, не только регулятором скорости, по и дополнительным регулятором, воздействие от которого подается на сервомоторы через электрогидравлический преобразователь.
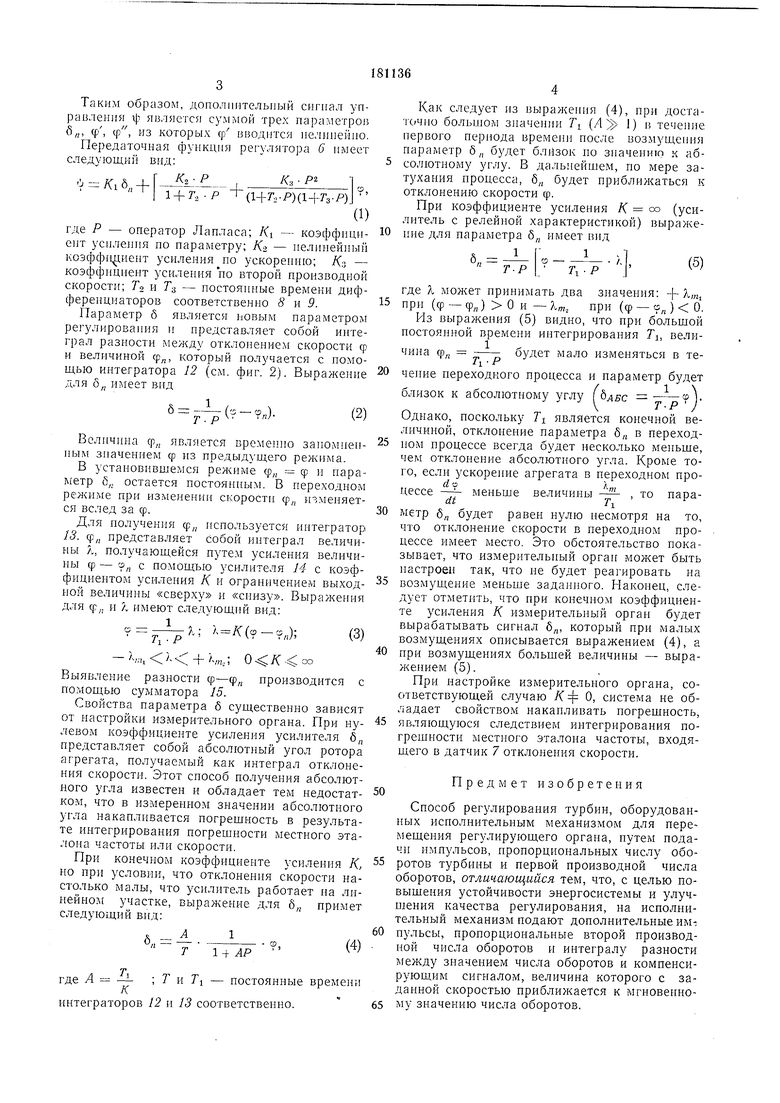
На фиг. 1 представлена структурная схема системы регулирования турбины в соответствии с предлагаемым способом; на фиг. 2 - структурная схема измерительного органа.
Сервомотор /, перемещающий регулирующие клапаны 2 турбины 5, управляется двумя сигналами: первый сигнал ф, представляющий отклонение скорости от заданной, поступает от регулятора 4 скорости обычного исполнения, второй сигнал г|) поступает через электрогидравлический преобразователь 5 от дополнительного регулятора 6.
Регулятор 6 содержит следующие элементы: датчик 7 скорости, датчик 8 ускореиия ф, представляющий собой дифференциатор, второй дифференциатор 9, обеспечивающий получение второй производной скорости ф (третьей производной абсолютного утла), нелинейное звено 10, обеспечивающее нелинейное воздействие по ускорению агрегата, и измерительный орган 11, позволяющий получить параметр регулирования б„. Таким образом, дополнительный сигнал управлеии5г я|л Я1зляется суммой трех параметров б„, ф, ф, из которых ф вводится нелипейпо. Передаточная функция регулятора 6 имеет следующий вид: -- Ki б„ -f I ,1 + Т,-Р Г(1-|-7-,,.р)(1+7з.Р) 1 I1 f тП где Р - оператор Лапласа; /d - коэффициент усиления по параметру; /Со - иелипейиый коэффициент усиления по ускореиию; К-л - коэффициент усиления по второй производной скорости; Го и Т- - постоянные времени дифференциаторов соответственио 8 и 9. Параметр б является новым параметром регулироваиия и представляет собой интеграл разности между отклонением скорости ф и величиной ф,,, который получается с помош,ью интегратора 12 (см. фиг. 2). Выражение для б„ HAieeT вид :;-77 () Величина ф„ является временно заномиепиым значением ф из предыдущего режима. В устаиовившемся режиме ф„ ф и параметр б,, остается постояиным. В переходном режиме при изменении скорости ф„ и/меняется вслед за ф. Для получения ф„ используется иитегратор /. ф„ представляет собой интеграл величины Я, получающейся путем усиления величины ф - 9/1 с помощью усилителя J4 с коэффициентом усиления К и ограничением выходной величины «сверху и «сиизу. Выражения для ф,, и /V имеют следующий вид: .; (-9„); - п, + v«,; О /С 00 Выявление разиости ф-ф„ производится с помощью сумматора 15. Свойства параметра б существенно зависят от настройки измерительиого органа. При нулевом коэффициенте усиления усилителя б„ представляет собой абсолютный угол ротора агрегата, получаемый как интеграл отклонения скорости. Этот сиособ получения абсолютного угла известен и обладает тем недостатком, что в измеренном значении абсолютного угла накапливается погрешность в результате иитегрирования погрешности местиого эталона частоты или скорости. При конечном коэффициенте усиления К, но при условии, что отклонения скорости настолько малы, что усилитель работает на лииейном участке, выражение для б„ примет следующий вид: б Л.. ,(4) Как следует из выражеиия (4), при достаточно большом значещп Т (Д 1) в тече1П1е первого периода временн после возмущення параметр 5„ будет близок по значению к абсолютному углу. В дальнейшем, по мере затухания процесса, б„ будет приближаться к отклонению скорости ф. При коэффициенте усиления /( оо (усилитель с релейной характеристикой) выражеиие для параметра б„ имеет вид где К может принимать два значення; -|-Лш, при (ф - ф„) О и - .от, при (ф - „ ) 0. Из выражения (5) видно, что при большой постоянной времени интегрирования Т, велн1чина ф„ оудет мало изменяться в течение переходного процесса и параметр будет близок к абсолютному углу ( бляс - Однако, поскольку Т является конечной величиной, отклонение параметра б„ в переходном процессе всегда будет несколько меньше, чем отклонение абсолютного угла. Кроме того, если ускорение агрегата в переходном проd , цессе - меньше величины -- , то нараМTIметр б„ будет равен нулю несмотря на то, что отклонение скорости в переходном процессе имеет место. Это обстоятельство показывает, что измерительный орган может быть настроен так, что не будет реагировать на возмуш,ение меньше заданного. Наконец, следует отметить, что при конечном коэффициенте усиления /С измерительный орган будет вырабатывать сигнал бл, который при малых возмущениях описывается выражением (4), а при возмущениях большей величины - выражением (5). При настройке измерительиого органа, соответствующей случаю Аф О, система не обладает свойством накапливать погрешность, являющуюся следствием иитегрирования погрешиости местиого эталона частоты, сходящего в датчик 7 отклонения скорости. Предмет изобретения Способ регулирования турбин, оборудованных исполнительным механизмом для перемещения регулирующего органа, путем подачи импульсов, пропорциональных числу оборогов турбины и первой производной числа оборотов, отличающийся тем, что, с целью повыщения устойчивости энергосистемы и улучщения качества регулирования, иа исполнительный механизм подают дополнительные импульсы, пропорциоиальные второй производной числа оборотов и интегралу разности между значением числа оборотов и компенсирующим сигиалом, величина которого с заданной скоростью приближается к мгновенно
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство для ограничения перетока активной мощности по межсистемной связи | 1978 |
|
SU744839A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПО ИНТЕГРАЛУ КОМПЕНСИРУЮЩЕГО ВОЗДЕЙСТВИЯ | 2003 |
|
RU2285281C2 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ВЫХОДНОГО ПАРАМЕТРА | 2005 |
|
RU2292575C2 |
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |
| Способ противоаварийного управления мощностью турбин | 1980 |
|
SU868918A1 |
| Система регулирования мощности энергоблока | 1981 |
|
SU979659A1 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА УСТОЙЧИВОЙ РАБОТЫ АСР | 2008 |
|
RU2388037C1 |
| Система регулирования энергоблока | 1980 |
|
SU931920A1 |

