/Изобретение относится к области оптического приборостроения и может быть использовано в информационно-измерительной технике.
Целью изобретения является повышение точности.
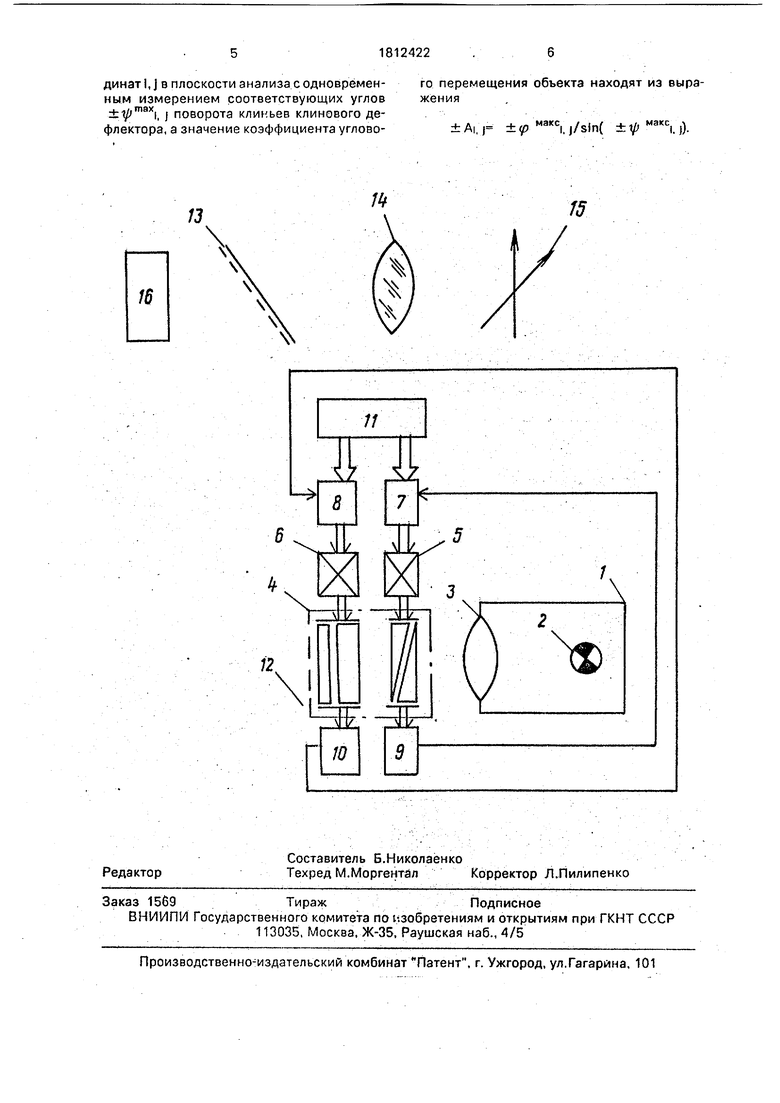
На чертеже представлена схема устройства для определения углового расположения осей в двух взаимно перпендикулярных плоскостях..
На схеме обозначены: 1 - формирователь светового луча, включающий излучатель 2 и линзу 3; 4 - двухкоординатный клиновой дефлектор; 5, 6 - редуктора дефлектора; 7, 8 - электроприводы дефлектора; 9, 10 - датчики углов поворота клиньев дефлектора; 11 - задатчик сигналов управления; 12 - зеркало; 13 - светоделительная .пластина; 14 -объектив; 15-плоскость анализа; 16 - оптический измеритель углов отклонения луча. Источник 2 установлен в фокальной поверхности линзы 3, в результате чего формирователь 1 посылает на двухкоординатный клиновой дефлектор 4 параллельный пучок лучей. В согласованных положениях каждой пары отклоняющих клиньев дефлектора 4 его действие на пучок лучей эквивалентно действию плоскопараллельной пластины. Зеркало 12 отклоняет этот пучок лучей на пластину 13, установленную вдоль линии визирования объектива 14, фокальная поверхность которого является плоскостью анализа. Задатчик 11 имеет два выхода, которые подключены к задающим входам электроприводов 7, 8, входы обратных связей которых подключены к выходам датчиком 9, 10 поворота клиньев дефлектора 4. Электроприводы 7 и 8 через соответствующие редукторы 5 и 6 подключены к парам отклоняющих клиньев дефлектора 4
оо
N)
N
кэ ю
и датчикам 9, 10 угловых положений клиньев.
Способ реализуется следующим образом.
В согласованном положении каждой пары клиньев устройство и оптический измеритель 16 углов отклонения выставляются соосно друг с другом, при этом фиксируются углы р°i, j начальной установки по лимбам оптического измерителя. Одновременно фиксируются показания датчиков °i,j. Затем измеритель 16 разворачивается на угол (+ р тах|)- с допуском (0,8-1,0) и задатчиком 11 начинается формирование изменяющегося сигнала по координате i. Под воздействием этого сигнала электропривод 7 оращает через редуктор 5 пару клиньев дефлектора, отклоняющую луч в горизонтальной плоскости. Совместно с парой клиньев дефлектора вращается также датчик 9, который вырабатывает сигнал фактического положения клиньев дефлектора 4. Этот сигнал поступает на вход обратной связи элёктро.привода 7, который устраняет рассогласование между воздействием задатчика.и фактическим положением. В момент совмещения изображения источника 2 с центром сетки оптического измерителя на задатчике 11 формируется команда на остановку электропривода, при этом злектропривод 7 фиксирует состояние клиньев дефлектора в положении + 1/;тах|. При необходимости до- совмещения изображения и оптического измерителя 16 последний поворачивается в пределах угла допуска, После этого оптический Измеритель устанавливают в положение (- y maxO+ P°il c допуском (0,9-1.,0)(- .- На задатчике 11 формируют команды, под воздействием которых клинья дефлектора 4. вращаются в противоположном направлении, а в момент совмещения изображения источника-2 с . центром сетки оптического измерителя 11 фиксируется угол (- pmaxi). По точным значениям измеренных углов вычисляют коэффициенты:
f(+pFax)- n/sin(+yr)-Vv . , 0)
AI( ±)
r(-pr)()+Vf
(2)
После этого клинья по координате I возвращают в согласованное положение и выполняются аналогичные операции по определению коэффициентов:
)-уРЗ/5И())- (з) М±) {
(-уГЧ+рП/зИС- РЧ+ П (4)
При измерениях на место углоизмери- тельного прибора 16 устанавливается автоколлимационное зеркало, связанное с объектом, изменяющим свою ориентацию в
пространстве. В.этом случае отраженный автоколлимационным зеркалом параллельный поток проходит через пластину 13 и объектив 14, фокусируясь последним в плоскости 15 анализа, причем изменения ориентации контролируемого объекта в пространстве характеризуются рассогласо- ванным положением сфокусированного изображения относительно пересечения координатных осей в плоскости анализа. Уст
ранение рассогласования осуществляется путем воздействия вна электроприводы 7 и 8 сигналами задатчика 11, которые в канале индикации измерения преобразуются с использованием коэффициентов углового пер емещения объекта AI, j{ ±) по следующим формулам:
25
30
35
40
45
50
55
р ±Ai(±)sin Vi . (5)
-.p-j ± Aj(±)sin у} .V., (6)
-Выбор знаков в выражения (5) и (б) осуществляют в зависимости от знаков углов ф таким образом, что при лр i, берут знак плюс, а при ф , 0 - минус.
Применение предложенного способа определения взаимного расположения осей в двух взаимно перпендикулярных плоскостях обеспечивает учет неэквивалентности преобразований различных углов отклонения луча в зависимости от углов поворота клиньев дефлектора. В результате повышается точность определения.
Формула изобретения
Способ определения взаимного углового расположения осей в двух взаимно перпендикулярных плоскостях, при котором на вход двухкоординатного клинового дефлектора подают световой луч, формируют в плоскости анализа изображение светящейся марки, перемещают путем поворота клиньев дефлектора изображение светящейся марки в контрольную точку плоскости анализа с измерением величины поворота клинового дефлектора 1р , j и обрабатывают результаты измерений с учетом коэффициента углового перемещения объекта AI, j, о т- л и ч а ю щ и и с я тем, что, с целью повышения точности, перед перемещением изображения светящейся марки о контролируемую точку плоскости анализа, производят регистрацию максимальны углом j отклонения светового луча клиновым дефлектором по каждой из координат I, j в плоскости анализа с одноврёмен- го перемещения объекта находят из выра- ным измерением соответствующих углов жёния ± /IIiaxii j поворота клиньев клинового дефлектора, а значение коэффициента углово±А|,, макс|. j/sln( .j).
ремещения объекта находят из выра я
±А|,, макс|. j/sln( .j).

| название | год | авторы | номер документа |
|---|---|---|---|
| Клиновой оптический компенсатор | 1977 |
|
SU717694A1 |
| СПЕКТРОМЕТР С РЕГУЛИРУЕМЫМ ДЕФЛЕКТОРОМ ДЛЯ УПРАВЛЕНИЯ ВЫРАВНИВАНИЕМ РАССЕЯННОГО СВЕТА НА ДЕТЕКТОРЕ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2011 |
|
RU2589505C2 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ГЛАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2257136C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2103752C1 |
| Способ повышения точности синтеза топологии элементов | 2017 |
|
RU2675077C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА МНОГОРАКУРСНОГО ЦВЕТНОГО ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 1989 |
|
RU2011312C1 |
| СИСТЕМА ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА | 2011 |
|
RU2475966C1 |
| Устройство для определения многомерной плотности распределения случайных процессов | 1988 |
|
SU1605266A1 |
| ЦИФРОВОЙ ДВУХКООРДИНАТНЫЙ ДИНАМИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2008 |
|
RU2437058C2 |
Использование: в области оптического приборостроения. Сущность изобретения: с целью достижения цели предварительно осуществляют регистрацию оптическим из мёрителем максимальных углов ±ip |макс; отклонения светового луча дефлектором по каждой из координат и фиксируют при этом соответствующие углы ±i/ MaKCi,j поворота клиньев дефлектора, по измеренным значениям углов ± макс|, j и ± макс|, i вычисляют величины: Ai.j(±) f+prrVsK+V fr0) -/rtrV : pffVslnC-V fr) а затем в соответствии с формулой pi, - ,± arcsln (М, j)f±) формируют сигналы управления, перемещающие изображение светящейся марки в заданную точку плоскости анализа и судят о величинах измеряемых углов по преобразованным показаниям датчиков углов поворота. 1 ил. 00 с
| Способ измерения угловых перемещений объекта в двух взаимно перпендикулярных плоскостях и устройство для его осуществления | 1981 |
|
SU1049735A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
