Способ повышения точности синтеза топологии элементов при их формировании с помощью лазерного генератора изображений (ЛГИ) с круговым сканированием относится к технологиям оптоэлектроники и может быть использован для улучшения технических характеристик синтезируемых оптических дифракционных элементов (ДОЭ) или высокоточных углоизмерительных структур (УИС).
Термины и сокращения, используемые в описании:
ЛГИ - лазерный генератор изображений;
ФЧМ - фоточувствительный материал;
УКС - узел кругового сканирования;
КОД - комбинированный оптический датчик.
Известен способ повышения точности синтеза топологии элементов при их формировании с помощью ЛГИ с круговым сканированием (Корольков В.П. / «Измерение и коррекция траектории движения лазерного пучка в круговых записывающих системах» // «Автометрия», 2003, том 39, №6, с. 13 - 25.), согласно которому по результатам измерений в выделенных угловых направлениях следа взаимодействия лазерного излучения с фоточувствительным материалом, нанесенным на поверхность носителя будущего элемента, полученного в результате записи тестовой окружности, определяют величину линейных искажений координат тестовой окружности, вносимых ЛГИ, например, из-за остаточного дисбаланса ротора шпинделя. По результатам измерений вычисляют величины поправок, которые потребуется внести в значения текущих радиальных координат. Эти значения заносят в блок памяти процессора. Затем для выбранных угловых направлений с помощью дефлектора, установленного в оптическом тракте ЛГИ, в ходе последующей записи топологии формируемых структур производят коррекцию радиальных координат точки взаимодействия (т.е. производят смещение в радиальном направлении на заданную величину текущих координат записывающего лазерного пятна). В указанном первоисточнике приводится, что экспериментально получено уменьшение амплитуды искажений с 220 нм до 42 нм, т.е в пять раз.
Недостатком известного способа является необходимость поворота пластины с тестовой записью на 180° и повторной тщательной юстировки пластины после ее поворота на предметном столике установки (план-шайбе). К недостаткам способа следует отнести так же то, что корректирующее воздействие рассчитано только для радиусов, лежащих в выбранных угловых направлениях, а в угловых промежутках между ними потребуются те или иные методы интерполяции.
Необходимость в повороте пластины с тестовой записью на план-шайбе установки обусловлена тем, что тестовый элемент записывается и считывается с помощью одних и тех же средств: а именно, с помощью той же записывающей головки, того же лазерного излучения лазера и того же узла вращения. В результате этого, при контрольном сканировании, не все дефекты записи выявляются. Поэтому, чтобы процессы записи и считывания сделать статистически независимыми в известном способе повышения точности записи топологии элементов при обмерах записанного тестового объекта производится изменение на 180° положения записанного тестового образца по сравнению с его положением при записи.
Кроме того, если пластина с фоточувствительным слоем имеет клин (т.е. имеется непараллелность рабочей и нерабочей поверхностей), то после поворота пластины на 180° изменятся параметры балансировки ротора, даже после идеальной центровки пластины, что внесет дополнительные искажения.
Но главным недостатком известного способа является то, что по следу взаимодействия в фоточувствительном материале (ФЧМ) весьма трудно точно определить параметры дестабилизирующего фактора, т.к. на разных радиусах поверхности фоточувствительного слоя один и тот же дестабилизирующий фактор проявляет себя по-разному.
Известен способ улучшения метрологических характеристик лазерных генераторов изображений с круговым сканированием, представленный в работе (Кирьянов А.В., Кирьянов В.П. / Улучшение метрологических характеристик лазерных генераторов изображений с круговым сканированием // Автометрия, 2010, Т. 46, №5, с. 77 - 93), где показано, что дисбаланс ротора приводит к появлению сложных паразитных движений оси ротора. Так, если центр масс ротора не совпадает с центром симметрии аэростатического подшипника, то при вращении ротора возникают угловые качания его оси, которые порождают т.н. регулярную прецессию оси. Возникающие при этом гироскопические ускорения порождают еще один вид вынужденных движений оси ротора - нутацию. Совместное действие трех составляющих: вращения ротора вокруг оси, прецессии и нутации самой оси - приводит к тому, что каждая точка на поверхности пластины с фоточувствительным материалом, установленной на предметном столике ротора, совершает движение по сложным траекториям. Причем из-за того, что на каждом радиусе поверхности материала линейная скорость вращения поверхности разная, то и результирующая траектория движения каждой точки поверхности относительно неподвижной головки записи разная.
Недостатком известного способа является неучет того обстоятельства, что дисбаланс ротора приводит к появлению сложных паразитных движений.
Перед авторами ставилась задача разработать способ, позволяющий повысить точность синтеза топологии элементов при их формировании с помощью лазерного генератора изображений с круговым сканированием при наличии сложных паразитных движений поверхности ФЧМ.
Поставленная задача решается тем, что в предлагаемом способе повышения точности синтеза топологии элементов, включающем использование лазерного генератора изображений с круговым сканированием, содержащего оптический тракт для обеспечения доставки лазерного излучения к головке записи; оптическую заготовку с нанесенным ФЧМ; фокусировку пучка лазерного излучения на поверхности оптической заготовки с нанесенным ФЧМ; перемещение сфокусированного пучка лазерного излучения по поверхности ФЧМ с помощью узла кругового сканирования и узла радиальных перемещений головки записи, при этом узел кругового сканирования оснащают дополнительно первым комбинированным оптическим датчиком, вторым комбинированным оптическим датчиком, при этом, первый комбинированный оптический датчик содержит первый измерительный диск с угловым и кольцевым растрами, первый датчик угловых перемещений измерительного растра и два идентичных датчика линейных перемещений, второй комбинированный оптический датчик содержит второй измерительный диск с угловым и кольцевым растрами, второй датчик угловых перемещений измерительного растра и два идентичных датчика линейных перемещений, которые отслеживают смещения оси вращения растра в двух ортогонально ориентированных радиальных направлениях, при этом первый комбинированный оптический датчик и второй комбинированный оптический датчик устанавливают по обе стороны относительно шпинделя узла кругового сканирования и соосно с ротором шпинделя узла кругового сканирования, причем датчики линейных перемещений первого комбинированного оптического датчика и второго комбинированного оптического датчика устанавливают в двух общих плоскостях, имеющих взаимный пространственный сдвиг на 90°, по выходным сигналам датчиков линейных перемещений первого комбинированного оптического датчика и второго комбинированного оптического датчика выявляют характер паразитных качаний оси ротора шпинделя узла кругового сканирования, определяют величины поправок для радиальной и угловой координат текущей точки взаимодействия пучка лазерного излучения с ФЧМ, нанесенным на поверхность оптической заготовки, и формируют управляющие сигналы для двухкоординатного оптического дефлектора, который устанавливают дополнительно в оптическом тракте таким образом, чтобы направления управляемых координат двухкоординатного оптического дефлектора совпадали с направлениями радиальных и угловых перемещений сфокусированного пучка лазерного излучения, при этом в узле радиальных перемещений головки записи лазерного генератора изображений кругового сканирования выделяют текущее отклонение от заданной координаты позиционирования, определяют величину поправки для радиальной координаты задаваемой точки взаимодействия пучка лазерного излучения с ФЧМ, нанесенным на оптическую заготовку, и формируют дополнительный управляющий сигнал для координаты двухкоординатного оптического дефлектора, совпадающей с радиальной координатой перемещений сфокусированного пучка лазерного излучения.
Техническим эффектом заявляемого способа повышения точности синтеза топологии элементов является снижение значения погрешности формирования топологии элементов менее чем 10 нм., уменьшение величины паразитной модуляции экспозиции ФЧМ, нанесенного на оптическую заготовку.
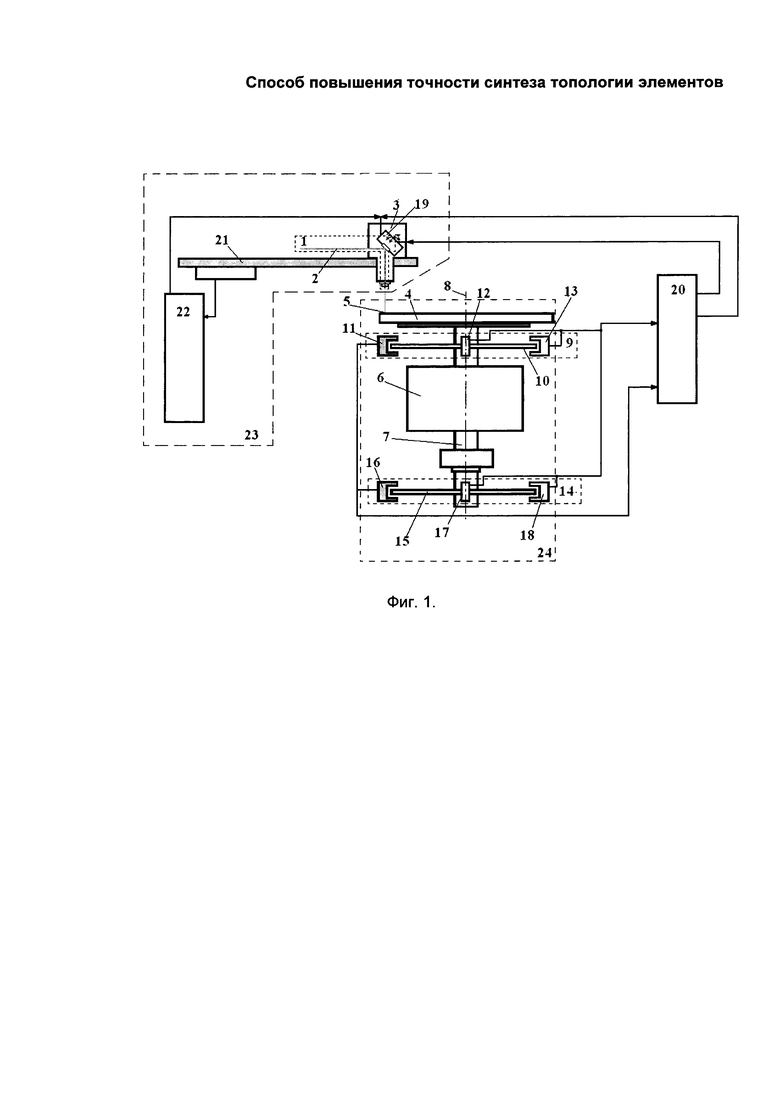
На фиг. 1 представлена техническая реализация заявляемого способа повышения точности синтеза топологии элементов, где 1 - оптический тракт, 2 -пучок лазерного излучения, 3 - головка записи, 4 - оптическая заготовка с фоточувствительным материалом, 5 - точка взаимодействия, 6 - шпиндель, 7 -ротор шпинделя, 8 - ось вращения ротора, 9 - первый комбинированный оптический датчик (КОД), 10 - первый измерительный диск с угловым и кольцевым растрами, 11 - первый датчик угловых перемещений измерительного растра, 12 -первый датчик линейных перемещений, 13 - второй датчик линейных перемещений, 14 - второй комбинированный оптический датчик (КОД), 15 - второй измерительный диск с угловым и кольцевым растрами, 16 - второй датчик угловых перемещений измерительного растра, 17 - третий датчик линейных перемещений, 18 - четвертый датчик линейных перемещений, 19 -двухкоординатный оптический дефлектор, 20 - процессор УКС, 21 - каретка узла радиальных перемещений головки записи, 22 - блок управления перемещениями каретки, 23 - узел радиальных перемещений, 24 - узел кругового сканирования.
Заявляемый способ повышения точности синтеза топологии элементов с использованием лазерного генератора изображений с круговым сканированием и содержащего оптический тракт 1 для обеспечения доставки лазерного излучения к головке записи 3; оптическую заготовку с нанесенным фоточувствительным материалом 4; фокусировку пучка лазерного излучения 2 на поверхности оптической заготовки с нанесенным фоточувствительным материалом 4; перемещение сфокусированного пучка лазерного излучения 2 по поверхности фоточувствительного материала с помощью узла кругового сканирования 24 и узла радиальных перемещений 23 головки записи 3, реализуется следующим образом. На фиг. 1 представлен заявляемый вариант, когда в составе узла кругового сканирования (УКС) 24 дополнительно используются первый комбинированный оптический датчик 9 и второй комбинированный оптический датчик 14, при этом первый комбинированный оптический датчик 9 содержит первый измерительный диск 10 с угловым и кольцевым растрами, а второй комбинированный оптический датчик 14 содержит второй измерительный диск 15 с угловым и кольцевым растрами, соответственно. В составе первого КОД 9 сформированы: первый датчик 11 угловых перемещений измерительного растра, первый измерительный диск 10 с угловым и кольцевым растрами первого КОД и два идентичных датчика линейных перемещений, которые для корректности описания, обозначаются как первый датчик линейных перемещений 12 и второй датчик линейных перемещений 13, а в составе второго КОД сформированы аналогичные датчики: второй датчик 16 угловых перемещений измерительного растра, второй измерительный диск с угловым и кольцевым растрами 15 и два идентичных датчика линейных перемещений, которые для корректности описания, обозначаются как третий датчик линейных перемещений 17 и четвертый датчик линейных перемещений 18, соответственно.
При этом первый датчик линейных перемещений 12, второй датчик линейных перемещений 13, третий датчик линейных перемещений 17 и четвертый датчик линейных перемещений 18, входящие в состав первого комбинированного оптического датчика 9 и второго комбинированного оптического датчика 14, отслеживают пространственные смещения оси вращения растра в двух ортогонально ориентированных радиальных направлениях. Причем первый датчик линейных перемещений 12 и третий датчик линейных перемещений 17 устанавливают в общей плоскости по обе стороны относительно ротора 7 шпинделя узла кругового сканирования 24. Аналогично второй датчик линейных перемещений 13 и четвертый датчик линейных перемещений 18 устанавливают в другой общей плоскости, имеющей пространственный сдвиг на 90° относительно первой общей плоскости. Регистрируя выходные сигналы первого датчика линейных перемещений 12, второго датчика линейных перемещений 13, третьего датчика линейных перемещений 17 и четвертого датчика линейных перемещений 18, выявляют характер паразитных биений ротора 7 шпинделя, входящего в состав шпинделя 6 узла кругового сканирования 24 лазерного генератора изображений (ЛГИ). Делается это следующим образом.
Пусть датчики линейных перемещений, а именно первый датчик линейных перемещений 12, второй датчик линейных перемещений 13, третий датчик линейных перемещений 17 и четвертый датчик линейных перемещений 18, соответственно, регистрируют смещение оси в соответствующих им направлениях со знаком «+», если расстояние между датчиками и осью вращения ротора 8 увеличивается, и - со знаком «-», если расстояние между ними сокращается.
Использование одновременно первого комбинированного оптического датчика 9 и второго комбинированного оптического датчика 14, обусловлено тем, что конструкция УКС не обеспечивает при синтезе топологии элементов соблюдения принципа компарирования Аббе, суть которого состоит в том, что измерительный прибор должен находиться в одной плоскости с контролируемым объектом. В ЛГИ синтез топологии элементов ведется с помощью головки записи 3 ЛГИ по фоточувствительному слою, нанесенному на поверхность оптической заготовки 4 с фоточувствительным материалом, используя для этого информацию, снимаемую с выхода первого датчика 11 угловых перемещений, входящего в состав первого комбинированного оптического датчика 9, а точнее с углового растра первого измерительного диска 10 с угловым и кольцевым растрами первого комбинированного оптического датчика 9. В этом случае плоскость синтеза топологии элементов отстоит от плоскости измерений на расстояние, которое далее будет рассматриваться как некоторый геометрический фактор Н. При этом Н = Н0 + d, где Н0 - расстояние от рабочей поверхности растра первого измерительного диска 10 с угловым и кольцевым растрами первого комбинированного оптического датчика 9 до нижней поверхности оптической заготовки с фоточувствительным материалом 4, d - текущая толщина оптической заготовки с фоточувствительным материалом 4.
Важно иметь в виду, что паразитное смещение оси вращения ротора 8 ротора шпинделя 7 узла кругового сканирования 24, зарегистрированное первым комбинированным оптическим датчиком 9, может не соответствовать реальному паразитному смещению луча лазера на поверхности оптической заготовки с фоточувствительным материалом 4, если в данный момент ось вращения ротора 8 совершает паразитное движение, включающее изменение наклона оси. Характерно, что при параллельном смещении оси вращения ротора 8 в пространстве, паразитное движение оси вращения ротора 8, зарегистрированное первым комбинированным оптическим датчиком 9, будет точно совпадать с паразитным смещением оптической заготовки с фоточувствительным материалом 4. Чтобы различать эти особенности, необходимо использовать два датчика, разнесенные в пространстве на базовое расстояние НБ. В рассматриваемом случае их роль выполняют первый комбинированный оптический датчик 9 и второй комбинированный оптический датчик 14, соответственно. Тогда, оценивая зарегистрированные одновременно двумя датчиками смещения оси вращения ротора 8, можно вычислить ΔХ - реальное смещение поверхности оптической заготовки с фоточувствительным материалом 4 относительно записывающей головки записи ЛГИ 3 следующим образом:
 ,
,
где  - тангенс текущего угла наклона оси вращения ротора 8 ротора шпинделя 7 УКС. Индекс 1 принадлежит смещениям оси вращения ротора 8, зарегистрированным первым комбинированным оптическим датчиком 9, а индекс 2 - вторым комбинированным оптическим датчиком 14.
- тангенс текущего угла наклона оси вращения ротора 8 ротора шпинделя 7 УКС. Индекс 1 принадлежит смещениям оси вращения ротора 8, зарегистрированным первым комбинированным оптическим датчиком 9, а индекс 2 - вторым комбинированным оптическим датчиком 14.
Используя данное соотношение, можно раздельно вычислить паразитные смещения точки взаимодействия 5 пучка лазерного излучения 2 с фоточувствительным слоем, обусловленные паразитными смещениями оси вращения 8 ротора узла кругового сканирования 24, как в радиальном, так и угловом (тангенциальном) направлениях. При этом принято, что ротор 7 шпинделя узла кругового сканирования, оптическая заготовка 4 с фоточувствительным материалом и растры первого измерительного диска 10 и второго измерительного диска 15 с угловым и кольцевым растрами первого и второго КОД, рассматриваются как абсолютно жесткие. Тогда для каждого из выбранных направлений смещения всех точек поверхности растров измерительного диска 10 с угловым и кольцевым растрами первого КОД, вызванные паразитными смещениями оси вращения, будут равны между собой по абсолютному значению.
Соответственно, искажения радиальной координаты ΔXR точки взаимодействия 5 сфокусированного пучка лазерного излучения 2, выходящего из головки записи ЛГИ 3, с фоточувствительным материалом определяются следующим образом:

Здесь ΔХ13 - приращение фазы выходных сигналов второго датчика линейный перемещений первого КОД 13 в данный момент времени, ΔХ17 - приращение фазы выходных сигналов третьего датчика линейных перемещений второго КОД 17 в тот же момент времени.
Значения фаз сигналов вычисляются в процессоре УКС 20 узла кругового сканирования ЛГИ, используя, например, арктангенсный алгоритм. Тогда ϕ=arc tg (sin ϕ / cos ϕ), где sin ϕ и cos ϕ - выходные сигналы считывающих головок второго датчика линейный перемещений первого КОД 13 и третьего датчика линейных перемещений второго КОД 17.
Аналогично, искажения в тангенциальном направлении ΔХθ координаты точки взаимодействия 5 сфокусированного пучка лазерного излучения 2, выходящего из головки записи ЛГИ 3, с фоточувствительным материалом определяются следующим образом:
где ΔХ12 - приращение фазы выходных сигналов головки первого датчика линейный перемещений первого КОД 12 в данный момент времени, ΔX16 - приращение фазы выходных сигналов головки второго датчика угловых перемещений измерительного растра второго КОД 16 в тот же момент времени. Значения фаз выходных сигналов для тангенциального направления вычисляются в процессоре УКС 20 как ϕ = arc tg (sin ϕ / cos ϕ), где sin ϕ и cos ϕ - выходные сигналы считывающих головок первого датчика линейный перемещений первого КОД 12 и второго датчика угловых перемещений измерительного растра второго КОД 16.
Затем на основании выделенных искажений ΔXR и ΔXθ в процессоре УКС 20 с учетом характеристик двухкоординатного оптического дефлектора 19, установленного в оптическом тракте 1 ЛГИ (лазерного генератора изображений), вычисляют величины поправок для обеих координат текущей точки взаимодействия 5 сфокусированного пучка лазерного излучения 2 с фоточувствительным материалом. На основе рассчитанных поправок формируют в реальном времени управляющие воздействия на двухкоординатный оптический дефлектор 19. Двухкоординатный оптический дефлектор 19 устанавливают дополнительно в оптическом тракте таким образом, чтобы направления управляемых координат двухкоординатного оптического дефлектора 19 совпадали с направлениями радиальных и угловых перемещений сфокусированного пучка лазерного излучения 2.
Вторая причина возможных искажений траекторий движения пучка лазерного излучения 2 по поверхности фоточувствительного материала - это наличие паразитных движений в радиальном направлении каретки узла радиальных перемещений головки записи ЛГИ 21 вместе с головкой записи ЛГИ 3, как следствие возмущающих воздействий со стороны шпинделя 6 узла кругового сканирования 24. Здесь под возмущающими воздействиями имеются ввиду, прежде всего, биения ротора 7 шпинделя 6 УКС из-за остаточного дисбаланса, т.к. для подавления внешних вибраций в ЛГИ, как правило, имеется штатная система виброизоляции оптико-механического блока ЛГИ. Т.е. остаточный дисбаланс ротора 7 шпинделя 6 возмущает не только пространственное положение оси вращения 8 ротора 7 шпинделя 6 узла кругового сканирования 24, но и положение каретки 21 узла радиальных перемещений головки записи 3 ЛГИ. Исследования спектрального состава гармоник выходных сигналов блока управления перемещениями каретки 22 в моменты, когда головка записи ЛГИ 3 удерживалась на заданном радиусе записи, действительно позволили выявить наличие в сигнале рассогласования блока управления 22 перемещениями каретки существенного вклада гармоники, частота которой равна частоте вращения ротора 7 шпинделя 6. Причем фаза этой гармоники, как правило, не совпадает с фазой сигнала возмущения, детектируемого с помощью датчиков 12 или 13 в узле кругового сканирования. По мнению авторов, это запаздывание связано со значительной массой гранитной плиты, на которой установлены и каретка 21 узла радиальных перемещений 23 головки записи 3 ЛГИ, и шпиндель 6 узла кругового сканирования 24, и через которую передаются вибрации шпинделя 6 узла кругового сканирования 24 на каретку 21 узла радиальных перемещений 23 головки записи 3 ЛГИ.
Поэтому для повышения точности синтеза топологии элементов при их формировании с помощью лазерного генератора изображений с круговым сканированием авторы предлагают в блоке управления 22 перемещениями каретки 21 выделить величину рассогласования в моменты, когда каретка 21 узла радиальных перемещений 23 головки записи 3 ЛГИ устойчиво находится в окрестностях задаваемой точки позиционирования. На ее основе рассчитать дополнительную поправку для радиальной координаты точки взаимодействия 5 лазерного луча 2 с фоточувствительным материалом оптической заготовки 4 и направить соответствующее воздействие на вход радиальной координаты упомянутого выше двухкоординатного оптического дефлектора 19. Данное управляющее воздействие позволит скомпенсировать в реальном времени смещения каретки 21 узла радиальных перемещений 23 головки записи 3 ЛГИ из-за дестабилизирующего воздействия остаточного дисбаланса ротора 7 шпинделя 6 УКС в узле кругового сканирования 24 ЛГИ с круговым сканированием.
Оценки положительного эффекта от использования в лазерных генераторах изображений с круговым сканированием предлагаемого способа повышения точности синтеза топологии элементов показывают возможность снижения значения погрешности формирования топологии элементов до 10 нм и менее.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 1998 |
|
RU2195694C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С УВЕЛИЧЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ДАЛЬНОСТЕЙ | 1995 |
|
RU2093848C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
Изобретение относится к области оптоэлектроники. Способ повышения точности синтеза топологии элементов заключается в использовании лазерного генератора изображений с круговым сканированием, содержащего оптический тракт для обеспечения доставки лазерного излучения к головке записи, оптическую заготовку с нанесенным фоточувствительным материалом; фокусировке пучка лазерного излучения на поверхности оптической заготовки с нанесенным фоточувствительным материалом; применении дополнительных двух комбинированных оптических датчиков, каждый из которых содержит измерительный диск с угловым и кольцевым растрами, датчик угловых перемещений измерительного растра и два датчика линейных перемещений, а также применении двухкоординатного оптического дефлектора, который устанавливают дополнительно в оптическом тракте таким образом, чтобы направления управляемых координат двухкоординатного оптического дефлектора совпадали с направлениями радиальных и угловых перемещений сфокусированного пучка лазерного излучения. Технический результат заключается в снижении значения погрешности формирования топологии элементов до 10 нм и менее, уменьшении величины паразитной модуляции экспозиции фоточувствительного материала, нанесенного на оптическую заготовку. 1 з.п. ф-лы, 1 ил.
1. Способ повышения точности синтеза топологии элементов, включающий использование лазерного генератора изображений с круговым сканированием, содержащего оптический тракт для обеспечения доставки лазерного излучения к головке записи; оптическую заготовку с нанесенным фоточувствительным материалом; фокусировку пучка лазерного излучения на поверхности оптической заготовки с нанесенным фоточувствительным материалом; перемещение сфокусированного пучка лазерного излучения по поверхности фоточувствительного материала с помощью узла кругового сканирования и узла радиальных перемещений головки записи, отличающийся тем, что узел кругового сканирования дополнительно оснащают первым комбинированным оптическим датчиком, вторым комбинированным оптическим датчиком, при этом первый комбинированный оптический датчик содержит первый измерительный диск с угловым и кольцевым растрами, первый датчик угловых перемещений измерительного растра и два идентичных датчика линейных перемещений, второй комбинированный оптический датчик содержит второй измерительный диск с угловым и кольцевым растрами, второй датчик угловых перемещений измерительного растра и два идентичных датчика линейных перемещений, которые отслеживают смещения оси вращения растра в двух ортогонально ориентированных радиальных направлениях, при этом первый комбинированный оптический датчик и второй комбинированный оптический датчик устанавливают по обе стороны относительно шпинделя узла кругового сканирования и соосно с ротором шпинделя узла кругового сканирования, причем датчики линейных перемещений первого комбинированного оптического датчика и второго комбинированного оптического датчика устанавливают в двух общих плоскостях, имеющих взаимный пространственный сдвиг на 90°, по выходным сигналам датчиков линейных перемещений первого комбинированного оптического датчика и второго комбинированного оптического датчика выявляют характер паразитных качаний оси ротора шпинделя узла кругового сканирования, определяют величины поправок для радиальной и угловой координат текущей точки взаимодействия пучка лазерного излучения с фоточувствительным материалом, нанесенным на поверхность оптической заготовки, и формируют управляющие сигналы для двухкоординатного оптического дефлектора, который устанавливают дополнительно в оптическом тракте таким образом, чтобы направления управляемых координат двухкоординатного оптического дефлектора совпадали с направлениями радиальных и угловых перемещений сфокусированного пучка лазерного излучения.
2. Способ повышения точности синтеза топологии элементов по п. 1, отличающийся тем, что в узле радиальных перемещений головки записи лазерного генератора изображений с круговым сканированием выделяют текущее отклонение от заданной координаты позиционирования, определяют величину поправки для радиальной координаты задаваемой точки взаимодействия пучка лазерного излучения с фоточувствительным материалом, нанесенным на оптическую заготовку, и формируют дополнительный управляющий сигнал для координаты двухкоординатного оптического дефлектора, совпадающей с радиальной координатой перемещений сфокусированного пучка лазерного излучения.
| Кирьянов А.В., Кирьянов В.П | |||
| "УЛУЧШЕНИЕ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ЛАЗЕРНЫХ ГЕНЕРАТОРОВ ИЗОБРАЖЕНИЙ С КРУГОВЫМ СКАНИРОВАНИЕМ", Автометрия, 2010, Т | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Волохов И.В | |||
| и др | |||
| "ИСПОЛЬЗОВАНИЕ ЛАЗЕРНЫХ ГЕНЕРАТОРОВ ИЗОБРАЖЕНИЙ С КРУГОВЫМ СКАНИРОВАНИЕМ ДЛЯ ИЗГОТОВЛЕНИЯ ПРЕЦИЗИОННЫХ ФОТОШАБЛОНОВ ДАТЧИКОВ ДАВЛЕНИЯ", Автоматика и программная иженерия, Открытое акционерное общество "Новосибирский институт программных систем", 20.11.2013, N3(5), страницы 42-45 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ ПРИ ОТКРЫВАНИИ И ЗАКРЫВАНИИ КРЫШКИ КОЖУХА ТРАНСФОРМАТОРА | 1929 |
|
SU17473A1 |
| US 4240750 A1, 23.12.1980. | |||

