Изобретение относится к областям физиологии высшей нервной деятельности, фармакологии, зоопсихологии и в частности к изучению сложных форм целенаправленного поведения.
Целью изобретения является детализация оценки процесса инструментального действия и постадийного целостного поведенческого акта, увеличение форм изучения целенаправленного поведения, а также расширение функциональных возможностей установки за счет максимального приближения условий изучения к естественной среде обитания животного.
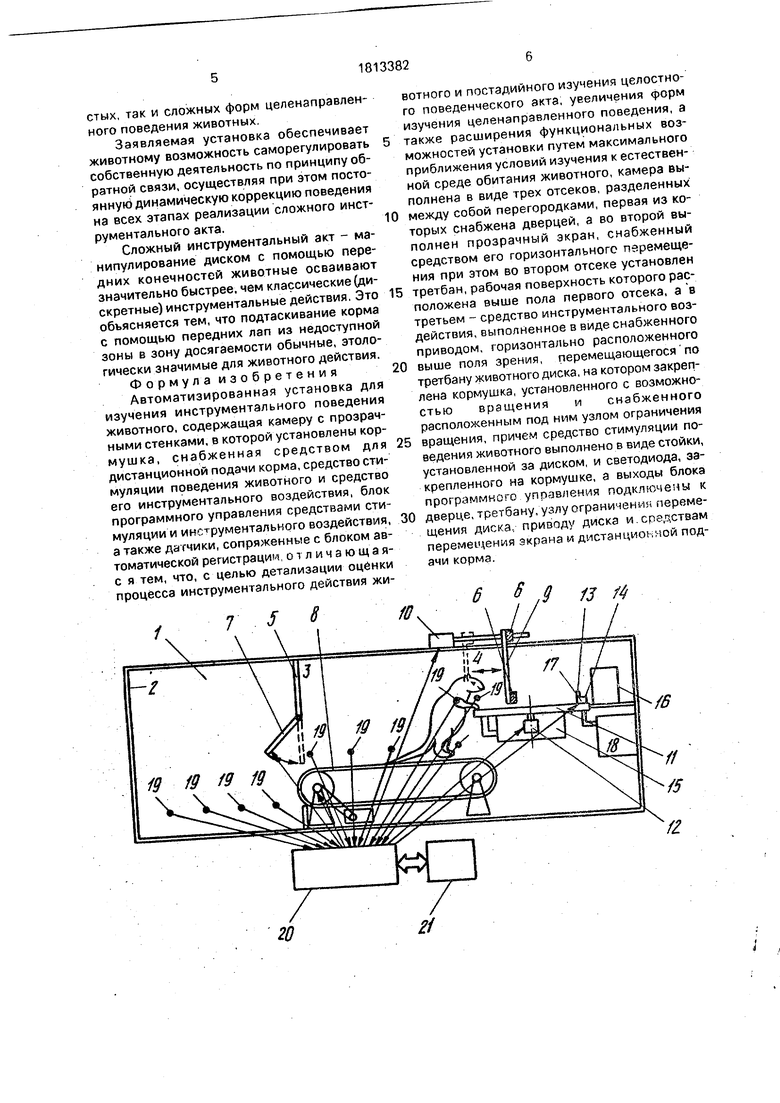
На чертеже изображена установка для изучения инструментального поведения животного.
Установка для изучения сложного инструментального поведения животного содержит камеру 1, выполненную в виде трех отсеков 2, 3, 4, которые разделены между собой перегородками 5, 6. На первой перегородке 5 установлена дверца 7 для создания дистанционно перекрываемого Отверстия. Между перегородками 5, 6 во втором отсеке 3 установлен тредбан 8. Во второй перегородке б выполнен прозрачный экран 9, снабженный средством 10 для
00
со
00
00
ю
его перемещения в горизонтальной плоскости. Средство инструментального воздействия 11 установлено в третьем отсеке 4 и выполнено в виде горизонтально расположенного манипуляторного диска, снабженного приводом 12 для обеспечения свободно-принудительного вращения вокруг своей оси манипуляторного диска 11. В одном из сегментов диска 11 выполнено отверстие 13, в котором размещена кормушка 14. Под диском 11 установлен узел 15 ограничения его перемещения. Средства стимуляции выполнены в виде стойки-ориентира 16, расположенной за диском 11 по центру третьего отсека 4, и светодиода 17, закрепленного на кормушке 14, система 18 подачи корма, датчики 19, блок 20 сопряжения, электронно-вычислительная машина 21.
Установка работает следующим образом.
Перед началом эксперимента с помощью привода вращательного движения 12 манипуляторный диск 11 устанавливают таким образом, что кормушка 14 и расположенный на ней светящийся светодиод 17 смещаются влево или вправо на заданный угол относительно стойки-ориентира .16, после чего привод 12 отключают. Затем включают узел 15 ограничения перемещения диска 11, чтобы вызвать остановку диска 11 в случае ошибки животного. После этого включают средство 10 перемещения прозрачного экрана 9 в горизонтальной плоскости и устанавливают экран 9 таким образом, чтобы часть диска 11 оставалась свободной для действия животного в рабочей зоне.
В первом отсеке камеры 1 помещают животное, которое, перемещаясь по первому отсеку 2, находит и открывает дверцу 7, дистанционно перекрывающую отверстие, и переходит на тредбан 8, при этом он неподвижен. Животное проходит второй отсек 3 и, встав на задние конечности около масти диска, свободной для манипулирования, используя средства стимуляции, определяют местоположение кормушки 14 по местоположению светодиода 17 относительно стойки-ориентира 16, расположенной за диском 11. После этого начинает манипулировать краем манипуляторного диска 11, перемещая по направлению к себе источник подкрепления - кормушку 14. В процессе инструментальной деятельности животное определяет характер и направление перемещения кормушки 14 и светодиода 17 и в соответствии с этим осуществляет коррекцию собственной деятельности.
Если животное правильно решает предъявляемую задачу и манипулируя краем диска 11 перемещает кормушку 14 в зону
0
5
0
5
0
достигаемости (рабочая зона), то оно имеет возможность достичь дна кормушки и с помощью системы 18 дозированной подачи корма получить порцию жидкой пищи.
После того как животное съест порцию жидкого корма, включают средство 10 для перемещения прозрачного экрана 9 в горизонтальной плоскости и отодвигают животное из рабочей зоны на тредбан 8. Затем включают тредбан и животное из второго отсека камеры перемещают в первый отсек. После этого установка вновь приводится в рабочее состояние в описанной ранее последовательности. Тредбан 8 останавливают, открывают дверцу 7 дистанционно перекрываемого отверстия, и животное имеет возможность осуществлять решение следующей задачи.
В том случае, если животное ошибается и манипулируя краем диска 11 направляет кормушку 14 не в заданном направлении, то диск 11 после прохождения пути в 90° останавливается узлом ограничения его перемещения 15, животное отодвигается прозрачным экраном 9 из рабочей зоны, а затем с помощью тредбана 8 в первый отсек 2. Устройство вновь приводят в рабочее состояние.
Управление работой установки осуществляется автоматически, для этого в первом, втором и третьем отсеках камеры 1 установлены датчики 19, которые непрерывно воспринимают информацию о перемещениях и действиях животного в процессе исследования. Полученная датчиками 19 ин- 5 формация передается в блок 20 сопряжения, где кодируется и передается для обработки и хранения в электронно-вычислительную машину 21. По специальной программе ЭВМ 21 на основе полученной информации о поведении животного выдает сигналы управления исполнительным органам установки, а именно дверце 7, тредбану 8, приводу 12 диска 11, средству 10 перемещения экрана 9, узлу 15 ограничения перемещения диска 11, системе 18 подачи корма.
Изобретение обладает следующими преимуществами.
Поскольку инструментальное действие животного в условиях предлагаемой установки в значительной степени развернуто во времени, то становится возможным детальное изучение процесса манипулирования и регулирующих его механизмов.
Наличие в камере трех отсеков позволяет детально анализировать все этапы реализации сложного инструментального поведенческого акта, что значительно повышает точность оценки поведения животного.
Предлагаемая установка позволяет изу- чать и оценивать широкий спектр как про0
5
0
5
стых, так и сложных форм целенаправленного поведения животных.
Заявляемая установка обеспечивает животному возможность саморегулировать собственную деятельность по принципу обратной связи, осуществляя при этом постоянную динамическую коррекцию поведения на всех этапах реализации сложного инструментального акта.
Сложный инструментальный акт - манипулирование диском с помощью передних конечностей животные осваивают значительно быстрее, чем классические (дискретные) инструментальные действия. Это объясняется тем, что подтаскивание корма с помощью передних лап из недоступной зоны в зону досягаемости обычные, этоло- гически значимые для животного действия.
Формула изобретения
Автоматизированная установка для изучения инструментального поведения животного, содержащая камеру с прозрачными стенками, в которой установлены кормушка, снабженная средством для дистанционной подачи корма, средство стимуляции поведения животного и средство его инструментального воздействия, блок программного управления средствами стимуляции и инструментального воздействия, а также датчики, сопряженные с блоком автоматической регистрации, отличающая- с я тем, что, с целью детализации оценки процесса инструментального действия животного и постадийного изучения целостного поведенческого акта, увеличения форм изучения целенаправленного поведения, а также расширения функциональных возможностей установки путем максимального приближения условий изучения к естественной среде обитания животного, камера выполнена в виде трех отсеков, разделенных между собой перегородками, первая из которых снабжена дверцей, а во второй выполнен прозрачный экран, снабженный средством его горизонтального перемещения при этом во втором отсеке установлен третбан, рабочая поверхность которого расположена выше пола первого отсека, а в третьем - средство инструментального воздействия, выполненное в виде снабженного приводом, горизонтально расположенного выше поля зрения, перемещающегося по третбану животного диска, на котором закреплена кормушка, установленного с возможностью вращения и снабженного расположенным под ним узлом ограничения вращения, причем средство стимуляции поведения животного выполнено в виде стойки, установленной за диском, и светодиода, закрепленного на кормушке, а выходы блока программного управления подключены к дверце, третбану, узлу ограничения перемещения диска, приводу диска и.средствам перемещения экрана и дистанционной подачи корма.
$ f ,9 13 f4
М/ LL
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ КОНЦЕНТРАЦИИ БЕЛКА ИРИСИНА В ПЛАЗМЕ КРОВИ, В ЭКСПЕРИМЕНТЕ | 2020 |
|
RU2731815C1 |
| Устройство для оценки поведения животных | 1985 |
|
SU1287799A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ХРОНИЧЕСКОГО ПОРАЖЕНИЯ СПИННОГО МОЗГА И ОБУЧЕНИЕ ЕГО ЛЕЧЕНИЮ НА МЕЛКИХ ЛАБОРАТОРНЫХ ЖИВОТНЫХ | 2009 |
|
RU2411589C1 |
| СТЕНД ЛАБОРАТОРНЫЙ АКТОГРАФИЧЕСКИЙ ДЛЯ ХРОНОБИОЛОГИЧЕСКИХ И ХРОНОФАРМАКОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ НА ЖИВОТНЫХ | 2018 |
|
RU2689692C1 |
| Устройство для исследования сложнорефлекторной поведенческой активности животных | 1986 |
|
SU1454384A1 |
| Способ исследования координационной способности | 1988 |
|
SU1586682A1 |
| Способ создания физиологического уровня физической нагрузки, в эксперименте | 2020 |
|
RU2737787C1 |
| УЛЕЙ МОДУЛЬНО-СЕКЦИОННЫЙ И РОЕУЛАВЛИВАЮЩАЯ НАДСТАВКА | 2009 |
|
RU2400060C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПОДДЕРЖАНИЯ РАВНОВЕСИЯ У ДЕЦЕРЕБРИРОВАННЫХ ЛАБОРАТОРНЫХ ЖИВОТНЫХ | 2009 |
|
RU2393761C1 |
| СПОСОБ ИССЛЕДОВАНИЯ КИНЕЗОДИНАМИКИ И ПОВЕДЕНИЯ ПОДОПЫТНЫХ ЖИВОТНЫХ | 2012 |
|
RU2520155C1 |
Использование: в изучении высшей нервной деятельности животных, в частности в устройствах для изучения сложных форм целенаправленного поведения животных. Сущность изобретения: установка имеет камеру, выполненную в виде трех отсеков, разделенных между собой перегородками. В первой из них выполнено дистанционно перекрываемое отверстие. Между перегородками во втором отсеке установлен тред- бан, поверхность которого расположена относительно пола первого отсека на высоте, равной росту животного. Во второй перегородке выполнен прозрачный экран, снабженный средством для его перемещения в горизонтальной плоскости, средство инструментального воздействия, установленное в третьем отсеке, выполнено в виде горизонтально расположенного диска с возможностью свободно-принудительного вращения вокруг своей оси, в одном из сегментов которого выполнено отверстие для размещения кормушки. Под диском установлен узел ограничения его перемещения. При этом диск установлен так, что его рабочая поверхность находится на высоте выше поля зрения животного, перемещающегося по тредбану. Средства стимуляции выполнены в виде стойки, расположенной за диском по центру третьего отсека, и световода, закрепленного на кормушке. Выходы программного управления подключены к дверце, к тредбану, к узлу ограничения перемещения диска, к приводу перемещения диска, к средству перемещения экрана и к средству дистанционной подачи корма. 1 ил. СЛ С
| Тинберген Н | |||
| Поведение животных | |||
| М.: Мир | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
