Изобретение относится к теплоэнергетике и может быть использовано при автоматизации управления паровыми турбинами.
Цель изобретения - повышение точности управления и контроля состояния исполнительных органов - отсечного золотника и сервомотора.
Для достижения цели при регулировании паровой турбины путем формирования управляющего сигнала и подачи его на отсечной золотник сервомотора регулирующих клапанов турбины непрерывно оценивают значения постоянных времен отсечного золотника и сервомотора, сравнивают их соответственно с пороговыми значениями постоянных времен и допустимыми среднеквадратичными значениями нерегулируемых колебаний, при выполнении условия невыхода всех контролируемых
параметров за пределы допустимых величин оцененные значения постоянных времен отсечного золотника и сервомотора используются для расчета текущих значений параметров используемого алгоритма регулирования, а при выходе значения любого из контролируемых параметров за пределы допустимых величин осуществляют операции, предусмотренные соответствующим технологическим алгоритмом.
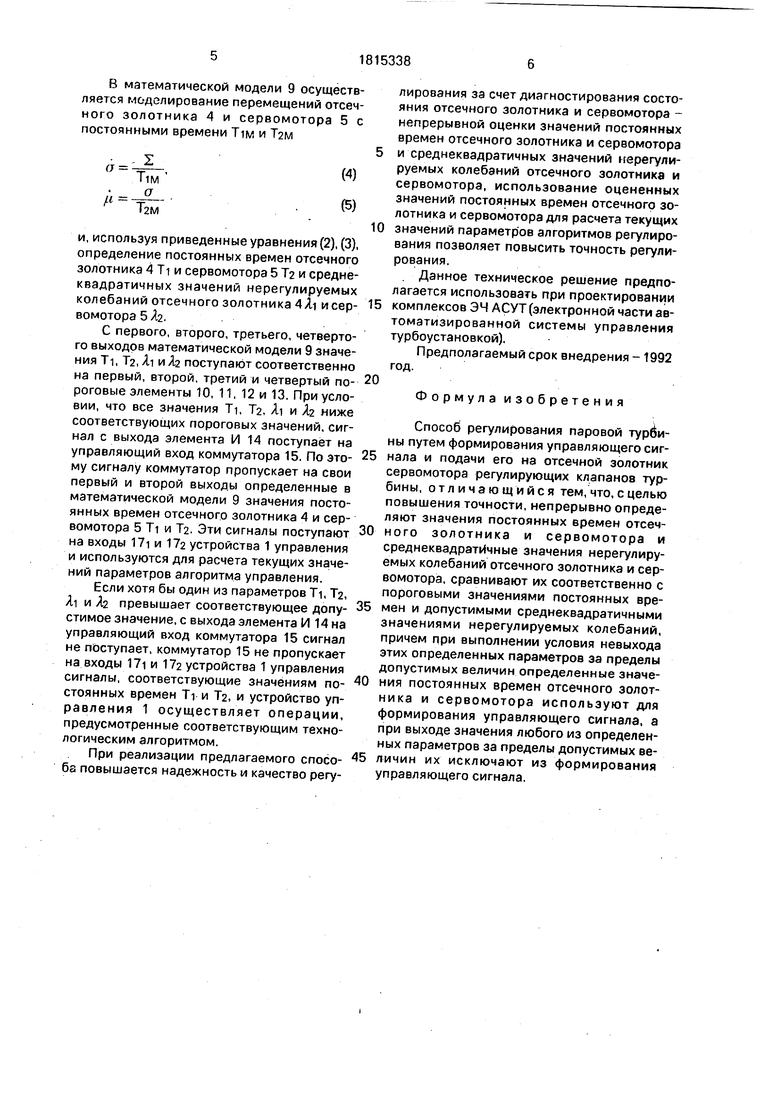
На чертеже приведен пример структурной схемы системы регулирования для осуществления предлагаемого способа.
Система регулирования содержит устройство 1 управления (например, ЭВМ), суммирующий усилитель 2, электрогидравлический преобразователь 3, отсечной золотник 4, сервомотор 5, регулирующий клапан 6, датчик 7 положения отсечного золотника, датчик 8 положения сервомотора.
СО СП
со
ICO 00
математическую модель 9, первый, второй, третий и четвертый пороговые элементы 10, 11, 12 и 13, элемент И 14, коммутатор 15.
Входы устройства 1 управления 16ч - 16n. 17i и 172.
Выход устройства 1 управления соединен с первым входом суммирующего усилителя 2, выход которого подключен к первому входу математической модели 9 и входу электрогидравлического преобразователя 3, связанного через последовательно соединенные отсечной золотник 4 и сервомотор 5 с регулирующим клапаном 6.
Выходы датчика 7 положения отсечного золотника и датчика 8 положения сервомотора подключены соответственно ко вторым и третьим входам суммирующего усилителя 2 и математической модели 9.
Первый выход математической модели 9 подключен к входу первого порогового элемента 10 и первому входу коммутатора 15. Второй выход математической модели 9 подключен к входу второго порогового элемента 11 и второму входу коммутатора 15. Третий и четвертый выходы математической модели 9 подключены соответственно к входам третьего и четвертого пороговых элементов 12 и 13.
Выходы первого, второго, третьего и четвертого пороговых элементов 10, 11, 12 и 13 соединены соответственно с первым, вторым, третьим и четвертым входами элемента И 14, выход которого подключен к управляющему входу коммутатора 15, первый и второй выходы которого подключены соответственно к входам 17г и Мг устройства 1 управления.
Система регулирования работает следующим образом.
Управление регулирующим клапаном б производится действием электрогидравлического следящего привода, который представляет собой гидравлическую исполнительную часть, построенную по отсечному признаку (отсечной золотник 4 - сервомотор 5), электрогидравлический преобразователь 3 и суммирующий усилитель 2. на вход которого поступает регулирующий сигнал с устройства 1 управления и сигналы обратных связей по положению отсечного золотника 4 и сервомотора 5 соответственно с датчиков 7 и 8 положения.
Управляющий сигнал суммирующего усилителя электрогидравлического преобразователя 3 может быть представлен в общем виде
2«-1((7+ + KxAx-Hl-/Axdi). /ZX О)
0
5
где fyt - коэффициент усиления сигнала обратной связи по положению сервомотора;
К0- коэффициент усиления сигнала обратной связи по положению отсечного золотника;
(7- сигнал положения отсечного золотника;
ц - сигнал положения сервомотора;
АХ - регулируемый параметр;
Кх - коэффициент пропорциональности;
Ту - постоянная времени интегральной составляющей по регулируемой переменной.
Уравнения состояния электрогидравлического следящего привода (отсечного золотника 4 и сервомотора 5) имеют вид
« 4+А1:
/,°+ь.
«2
(2)
(3)
где TI - постоянная времени отсечного зо
лотника;
Т2 - постоянная времени сервомотора; AI- нерегулируемые возмущения отсечного золотника;
Я2 - нерегулируемые возмущения серво- мотора.
На входы 16i - 16п устройства 1 управления поступают сигналы и команды энергосистемы, реактора, состояния оборудования, параметров турбогенератора (например, сигнал об отключении выключателя генератора, сигналы о возрастании или снижении частоты сети, сигналы, формируемые при снижении давления пара или при мощности ниже уставки и др.), с учетом которых по соответствующему алгоритму формируется управляющий сигнал.
С выхода устройства 1 управления управляющий сигнал поступает на первый вход суммирующего усилителя 2, на второй и третий входы которого поступают соответственно сигналы обратной связи с датчика 7 положения отсечного золотника 4 и датчика 8 положения сервомотора 5.
Суммирующий управляющий сигнал с выхода суммирующего усилителя 2 поступает на электрогидравлический преобразователь 3, который через отсечной золотник 4 и сервомотор 5 управляет регулирующим клапаном 6, и одновременно - на первый вход математической модели 9.
На второй и третий входы математической модели 9 поступают соответственно сигналы с Датчика 7 положения отсечного золотника 4 и датчика 8 положения сервомотора 5.
В математической модели 9 осуществляется моделирование перемещений отсечного золотника 4 и сервомотора 5 с постоянными времени TIM и Там
(4)
(5)
и, используя приведенные уравнения (2), (3), определение постоянных времен отсечного золотника 4 Тч и сервомотора 5 Т2 и среднеквадратичных значений нерегулируемых колебаний отсечного золотника 4Ai исер- вомотора 5 Лг.
С первого, второго, третьего, четвертого выходов математической модели 9 значения TL T2, AI иЯ2 поступают соответственно на первый, второй, третий и четвертый пороговые элементы 10, 11, 12 и 13. При условии, что все значения Ti, Та, AI и Аа ниже соответствующих пороговых значений, сигнал с выхода элемента И 14 поступает на управляющий вход коммутатора 15. По этому сигналу коммутатор пропускает на свои первый и второй выходы определенные в математической модели 9 значения постоянных времен отсечного золотника 4 и сервомотора 5 Ti и Та. Эти сигналы поступают на входы 17i и 17а устройства 1 управления и используются для расчета текущих значений параметров алгоритма управления.
Если хотя бы один из параметров TL Та, AI и Аа превышает соответствующее допу- стимое значение, с выхода элемента И 14 на управляющий вход коммутатора 15 сигнал не поступает, коммутатор 15 не пропускает на входы и 1 2 устройства 1 управления сигналы, соответствующие значениям постоянных времен Тг и Та, и устройство уп- равления 1 осуществляет операции, предусмотренные соответствующим технологическим алгоритмом.
При реализации предлагаемого спосо- бз повышается надежность и качество регу
0
5
5
5
0
5
0
0
лирования за счет диагностирования состояния отсечного золотника и сервомотора - непрерывной оценки значений постоянных времен отсечного золотника и сервомотора и среднеквадратичных значений нерегулируемых колебаний отсечного золотника и сервомотора, использование оцененных значений постоянных времен отсечного золотника и сервомотора для расчета текущих значений параметров алгоритмов регулирования позволяет повысить точность регулирования.
Данное техническое решение предполагается использовать при проектировании комплексов ЭЧ АСУТ (электронной части автоматизированной системы управления турбоустановкой).
Предполагаемый срок внедрения - 1992 год.
Формула изобретения
Способ регулирования паровой турбины путем формирования управляющего сигнала и подачи его на отсечной золотник сервомотора регулирующих клапанов турбины, отличающийся тем, что, с целью повышения точности, непрерывно определяют значения постоянных времен отсечного золотника и сервомотора и среднеквадратичные значения нерегулируемых колебаний отсечного золотника и сервомотора, сравнивают их соответственно с пороговыми значениями постоянных времен и допустимыми среднеквадратичными значениями нерегулируемых колебаний, причем при выполнении условия невыхода этих определенных параметров за пределы допустимых величин определенные значения постоянных времен отсечного золотника и сервомотора используют для формирования управляющего сигнала, а при выходе значения любого из определенных параметров за пределы допустимых величин их исключают из формирования управляющего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Способ регулирования турбины при сбросе нагрузки | 1983 |
|
SU1245723A1 |
| Способ регулирования турбины | 1984 |
|
SU1213224A1 |
| Способ регулирования турбины при сбросе нагрузки | 1985 |
|
SU1288323A1 |
| Система регулирования турбоагрегата | 1984 |
|
SU1160064A1 |
| Способ регулирования турбины | 1983 |
|
SU1170177A1 |
| Система регулирования турбины | 1977 |
|
SU661122A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ПАРОВОЙ ТУРБИНЫ | 1992 |
|
RU2031211C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПАРОВОЙ ТУРБИНЫ | 2003 |
|
RU2248451C1 |
Использование: изобретение относится к теплоэнергетике и может быть использовано при автоматизации управления паровыми турбинами. Сущность изобретения: на второй и третий входы суммирующего усилителя 2 поступают соответственно сигналы обратной связи с датчика 7 положения отсечного золотника 4 и датчика 8 положения сервомотора 5. Сигналы с датчиков 7 и 4 поступают на входы математической модели 9. В математической модели 9 осуществляется моделирование перемещений отсечного золотника 4 и сервомотора 5 с постоянными времени TIM и Там. С выходов математической модели 9 значения Ti, T2, AI иАа поступают соответственно на пороговые элементы 10, 11,12,13. При условии, что все значения Ti, Та, AI и Аа ниже соответствующих пороговых значений, сигнал с выхода элемента И 14 поступает на управляющий вход коммутатора 15. Если хотя бы один из параметров Ti, J2, Ai и Аа превышает соответствующее допустимое значение, с выхода элемента И 14 на управляющий вход коммутатора 15 сигнал не поступает, 1 ил.
| Устройство для регулирования турбины с отбором пара | 1983 |
|
SU1138525A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
