2. Устройство по п. 1, отличающееся тем, что каждый электронный блок управления выполнен в виде формирователя постоянного напряжения и задающего генератора, снабженных органами управления и подключенных к входам общего сумматора.
3. Устройство по пп. 1 и 2, отличающееся тем, что каждый нелинейный корректирующий элемент выполнен в виде последовательно соединенных масщтабирующего амплитудного ограничителя и суммирующего звена.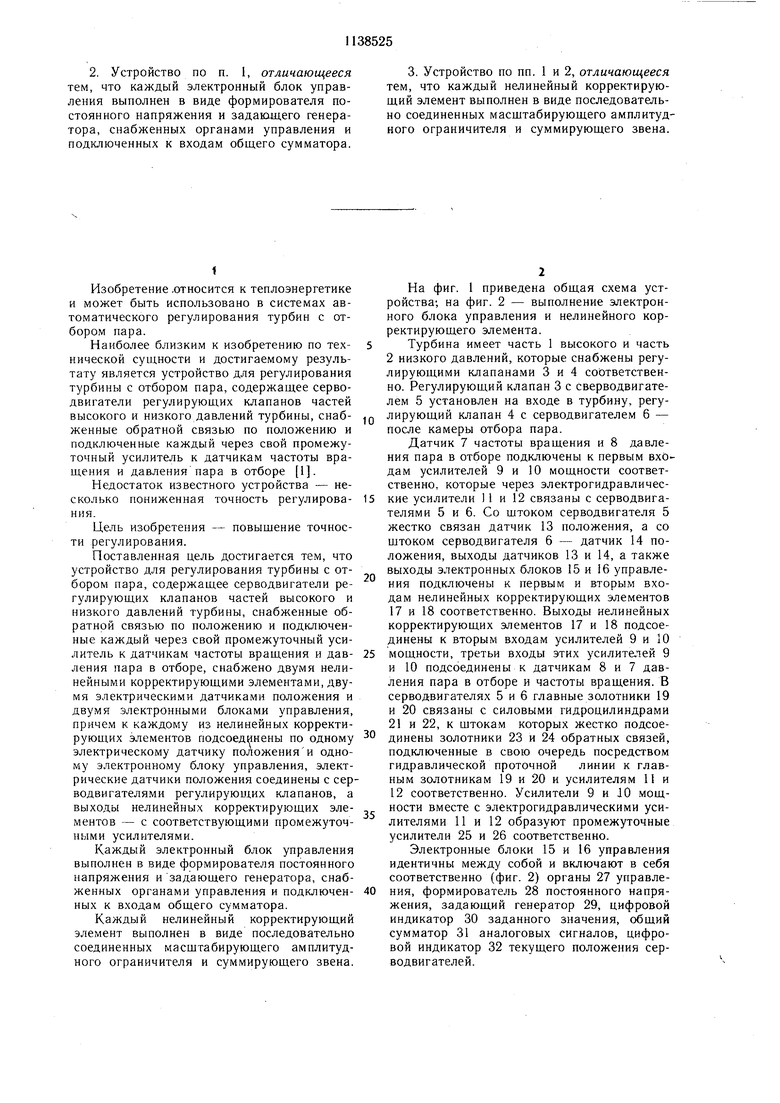
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ И ЗАЩИТЫ ПАРОВОЙ ТУРБИНЫ | 2010 |
|
RU2450128C1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПАРОВОЙ ТУРБИНЫ | 2003 |
|
RU2248451C1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Система регулирования энергоблока | 1978 |
|
SU696169A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ПАРОВОЙ ТУРБИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2117770C1 |
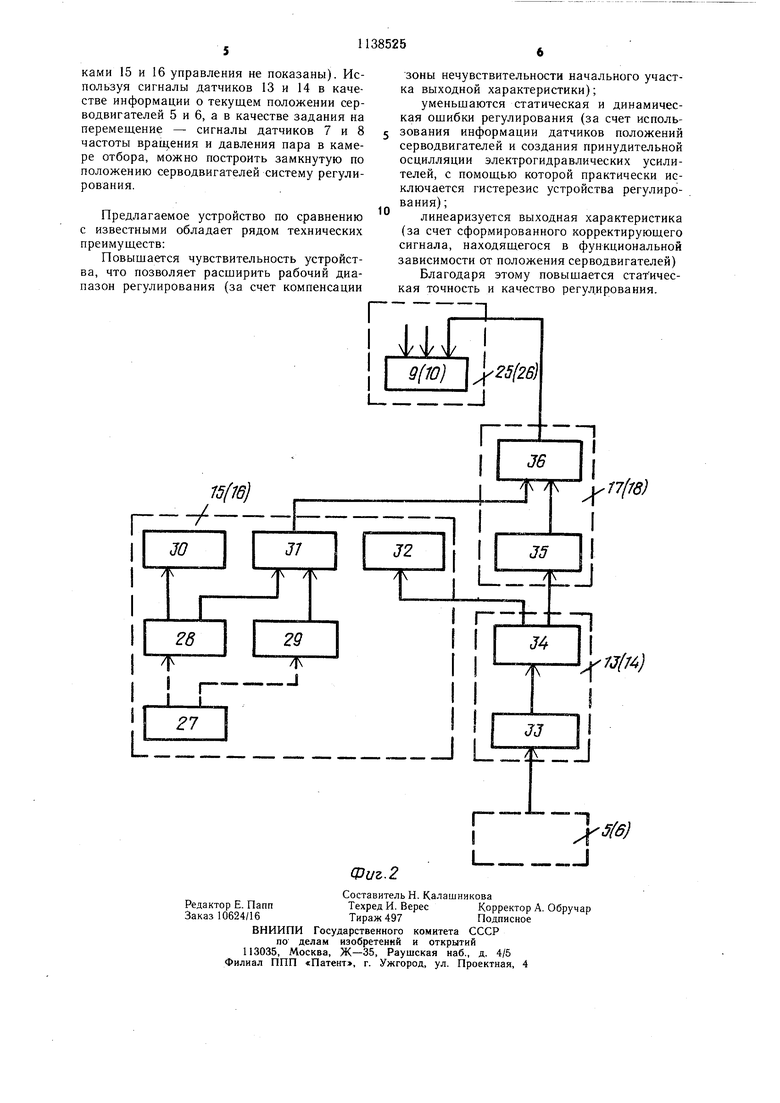
1. УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТУРБИНЫ С ОТБОРОМ ПАРА, содержащее серводвигатели регулирующих клапанов частей высокого и низкого давлений турбины, снабженные обратной связью по положению и подключенные каждый через свой промежуточный усилитель к датчикам частоты вращения и давления пара в отборе, отличающееся тем, что, с целью повышения точности регулирования, устройство снабжено двумя нелинейными корректирующими элементами, двумя электрическими датчиками положения и двумя электронными блоками управления, причем к каждому из нелинейных корректирующих элементов подсоединены по одно1 1у электрическому датчику положения и одному электронному блоку управления, электрические датчики положения соединены с серводвигателями регулирующих клапанов, а выходы нелинейных корректирующих элементов - с соответствующими промежуточными усилителями. .IXT-J J
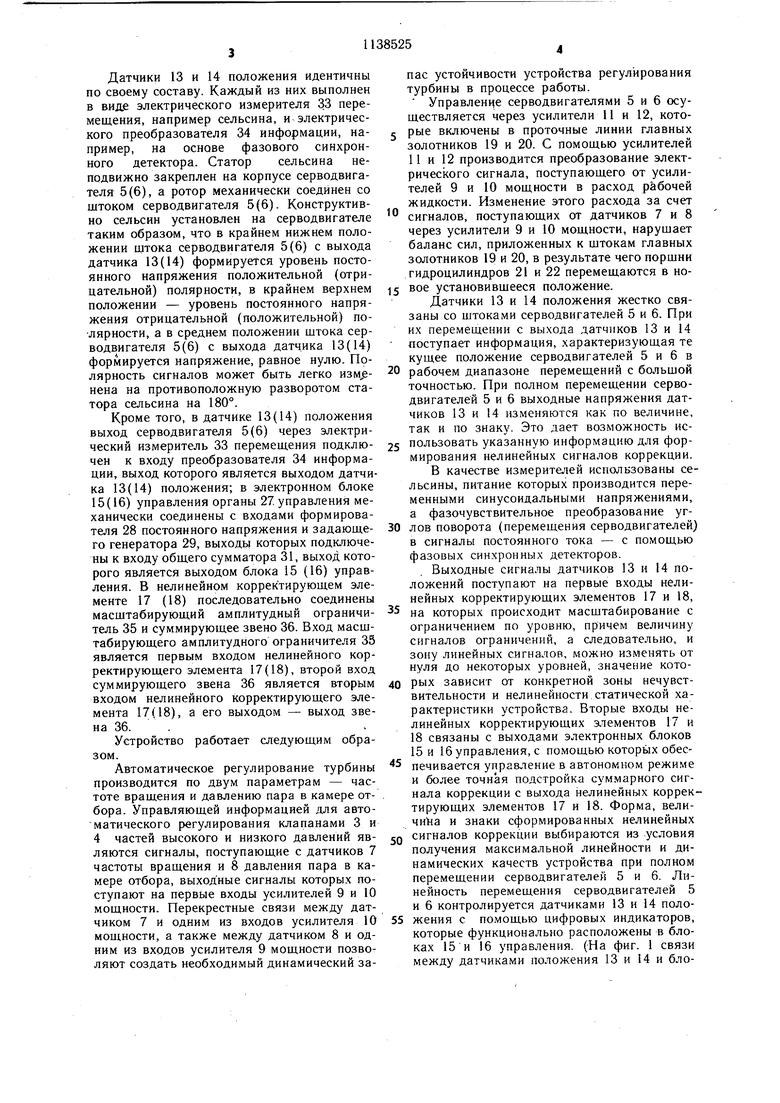
Изобретение .относится к теплоэнергетике и может быть использовано в системах автоматического регулирования турбин с отбором пара. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для регулирования турбины с отбором пара, содержащее серводвигатели регулирующих клапанов частей высокого и низкого давлений турбины, снабженные обратной связью по положению и подключенные каждый через свой промежуточный усилитель к датчикам частоты вращения и давления пара в отборе 1. Недостаток известного устройства - несколько пониженная точность регулирования. Цель изобретения - повышение точности регулирования. Поставленная цель достигается тем, что устройство для регулирования турбины с отбором пара, содержащее серводвигатели регулирующих клапанов частей высокого и низкого давлений турбины, снабженные обратной связью по положению и подключенные каждый через свой промежуточный усилитель к датчикам частоты вращения и давления пара в отборе, снабжено двумя нелинейными корректирующими элементами, двумя электрическими датчика.ми положения и двумя электронными блоками управления, причем к каждому из нелинейных корректирующих элементов подсоединены по одному электрическому датчику положенияи одному электронному блоку управления, электрические датчики положения соединены с сер водвигателями регулирующих клапанов, а выходы нелинейных корректирующих элементов - с соответствующими промежуточными усилителями. Каждый электронный блок управления выполнен в виде формирователя постоянного напряжения изадающего генератора, снабженных органами управления и подключенных к входам общего сумматора. Каждый нелинейный корректирующий элемент выполнен в виде последовательно соединенных масштабирующего амплитудного ограничителя и суммирующего звена. На фиг. 1 приведена общая схема устройства; на фиг. 2 - выполнение электронного блока управления и нелинейного корректирующего элемента. Турбина имеет часть 1 высокого и часть 2 низкого давлений, которые снабжены регулирующими клапанами 3 и 4 соответственно. Регулирующий клапан 3 с сверводвигателем 5 установлен на входе в турбину, регулирующий клапан 4 с серводвигателем 6 - после камеры отбора пара. Датчик 7 частоты вращения и 8 давления пара в отборе подключены к первым входам усилителей 9 и 10 мощности соответственно, которые через электрогидравлические усилители 1 и 12 связаны с серводвигателями 5 и 6. Со штоком серводвигателя 5 жестко связан датчик 13 положения, а со штоком серводвигателя 6 - датчик 14 положения, выходы датчиков 13 и 14, а также выходы электронных блоков 15 и 16 управления подключены к первым и вторым входам нелинейных корректирующих элементов 17 и 18 соответственно. Выходы нелинейных корректирующих элементов 17 и 18 подсоединены к вторым входам усилителей 9 и 10 мощности, третьи входы этих усилителей 9 и 10 подсоединены к датчикам 8 и 7 давления пара в отборе и частоты вращения. В серводвигателях 5 и 6 главные золотники 19 и 20 связаны с силовыми гидроцилиндрами 21 и 22, к штокам которых жестко подсоединены золотники 23 и 24 обратных связей, подключенные в свою очередь посредством гидравлической проточной линии к главным золотникам 19 и 20 и усилителям 11 и 12 соответственно. Усилители 9 и JO мощности вместе с электрогидравлическими усилителями 11 и 12 образуют промежуточные усилители 25 и 26 соответственно. Электронные блоки 15 и 16 управления идентичны между собой и включают в себя соответственно (фиг. 2) органы 27 управления, формирователь 28 постоянного напряжения, задающий генератор 29, цифровой индикатор 30 заданного значения, общий сумматор 31 аналоговых сигналов, цифровой индикатор 32 текущего положения серводвигателей.
Датчики 13 и 14 положения идентичны по своему составу. Каждый из них выполнен в виде электрического измерителя 33 перемещения, например сельсина, и электрического преобразователя 34 информации, например, на основе фазового синхронного детектора. Статор сельсина неподвижно закреплен на корпусе серводвигателя 5(6), а ротор механически соединен со штоком серводвигателя 5(6). Конструктивно сельсин установлен на серводвигателе таким образом, что в крайнем нижнем положении штока серводвигателя 5(6) с выхода датчика 13(14) формируется уровень постоянного напряжения положительной (отрицательной) полярности, в крайнем верхнем положении - уровень постоянного напряжения отрицательной (положительной) полярности, а в среднем положении штока серводвигателя 5(6) с выхода датчика 13(14) формируется напряжение, равное нулю. Полярность сигналов может быть легко изм,енена на противоположную разворотом статора сельсина на 180°.
Кроме того, в датчике 13(14) положения выход серводвигателя 5(6) через электрический измеритель 33 перемещения подключен к входу преобразователя 34 информации, выход которого является выходом датчика 13(14) положения; в электронном блоке 15(16) управления органы 27. управления механически соединены с входами формирователя 28 постоянного напряжения и задающего генератора 29, выходы которых подключены к входу общего сумматора 31, выход которого является выходом блока 15 (16) управления. В нелинейном корректирующем элементе 17 (18) последовательно соединены масштабирующий амплитудный ограничитель 35 и суммирующее звено 36. Вход масштабирующего амплитудного ограничителя 35 является первым входом нелинейного корректирующего элемента 17(18), второй вход суммирующего звена 36 является вторым входом нелинейного корректирующего элемента 17(18), а его выходом - выход звена 36..
Устройство работает следующим образом.
Автоматическое регулирование турбины производится по двум параметрам - частоте вращения и давлению пара в камере отбора. Управляющей информацией для автоматического регулирования клапанами 3 и 4 частей высокого и низкого давлений являются сигналы, поступающие с датчиков 7 частоты вращения и 8 давления пара в камере отбора, выходные сигналы которых поступают на первые входы усилителей 9 и 10 мощности. Перекрестные связи между датчиком 7 и одним из входов усилителя 10 мощности, а также между датчиком 8 и одним из входов усилителя 9 мощности позволяют создать необходимый динамический запас устойчивости устройства регулирования турбины в процессе работы. Управленце серводвигателями 5 и 6 осуществляется через усилители 11 и 12, котог рые включены в проточные линии главных золотников 19 и 20. С помощью усилителей 11 и 12 производится преобразование электрического сигнала, поступающего от усилителей 9 и 10 мощности в расход рабочей жидкости. Изменение этого расхода за счет
сигналов, поступающих от датчиков 7 и 8 через усилители 9 и 10 мощности, нарушает баланс сил, приложенных к штокам главных золотников 19 и 20, в результате чего поршни гидроцилиндров 21 и 22 перемещаются в но5 вое установившееся положение.
Датчики 13 и 14 положения жестко связаны со штоками серводвигателей 5 и 6. При их перемещении с выхода датчиков 13 и 14
поступает информация, характеризующая те кущее положение серводвигателей 5 и 6 в
0 рабочем диапазоне перемещений с большой точностью. При полном перемещении серводвигателей 5 и 6 выходные напряжения датчиков 13 и 14 изменяются как по величине, так и по знаку. Это дает возможность использовать указанную информацию для формирования нелинейных сигналов коррекции. В качестве измерителей использованы сельсины, питание которых производится переменными синусоидальными напряжениями, а фазочувствительное преобразование углов поворота (перемещения серводвигателей) в сигналы постоянного тока - с помощью фазовых синхронных детекторов.
Выходные сигналы датчиков 13 и 14 положений поступают на первые входы нелинейных корректирующих элементов 17 и 18,
5 на которых происходит масштабирование с ограничением по уровню, причем величину сигналов ограничений, а следовательно, и зону линейных сигналов, можно изменять от нуля до некоторых уровней, значение которых зависит от конкретной зоны нечувствительности и нелинейности статической характеристики устройства. Вторые входы нелинейных корректирующих апементов 17 и 18 связаны с выходами электронных блоков 15 и 16 управления, с помощью которь1х обес печивается управление в автономном режиме и более точная подстройка суммарного сигнала коррекции с выхода нелинейных корректирующих элементов 17 и 18. Форма, величина и знаки сформированных нелинейных
0 сигналов коррекции выбираются из условия получения максимальной линейности и динамических качеств устройства при полном перемещении серводвигателей 5 и 6. Линейность перемещения серводвигателей 5 и 6 контролируется датчиками 13 и 14 положения с помощью цифровых индикаторов, которые функционально расположены в блоках 15 и 16 управления. (На фиг. 1 связи между датчиками положения 13 и 14 и бло
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система регулирования турбины с отбором пара | 1975 |
|
SU553345A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
