Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для выделения контура изображения и может быть использовано в системе технического зрения роботов.
Целью изобретения является повышение точности устройства за счет уточнения условий определения принадлежности элементов изображения его контура и определения дополнительных информационных признаков о контуре изображения, таких как точки перегиба и прямолинейные участки, а также классификации прямолинейных участков контура изображения сложной конфигурации путем устранения указанных выше недостатков прототипа.
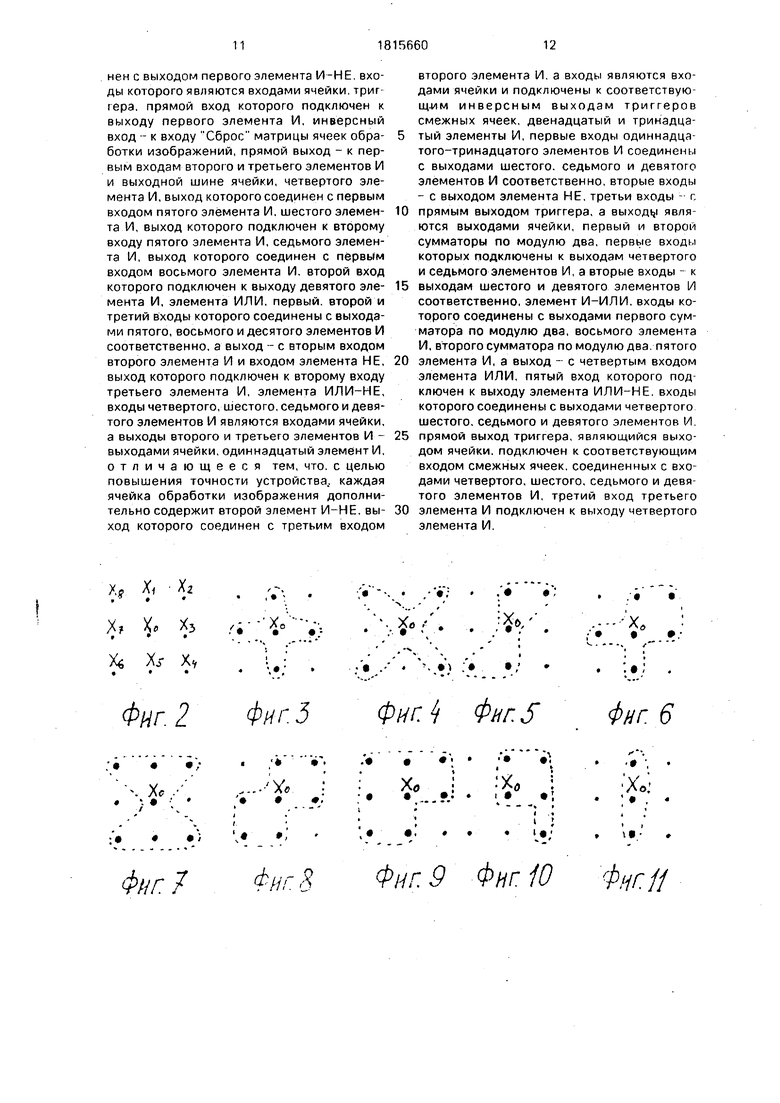
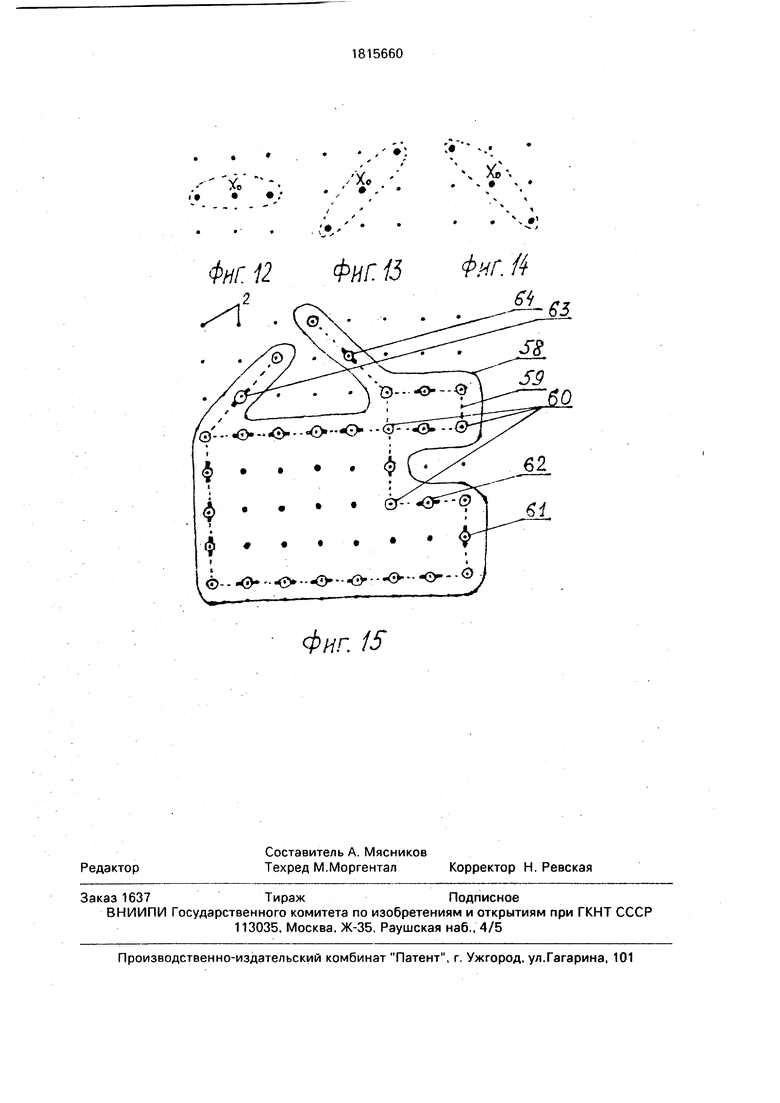
На фиг.1 представлена схема предлагаемого устройства; на фиг.2 - схема расположения фотоприемных элементов; на фиг.3-10 показаны участки контура изображения, выделяемые нашим устройством, когда фотоприемный элемент 2 данной ячейки, соответствующий положению Х0 (см. фиг.2), относится к контуру изображения и определяется принадлежностью его точке перегиба контура изображения; на фиг. 11-14 - прямолинейные участки контура изображения, выделяемые нашим устройством, типа прямая перпендикулярна, прямая параллельная.диагональ правая и диагональ левая соответственно, когда фотоприемный элемент данной ячейки, соответствующий положению Х0 (см. фиг.2), относится к контуру изображения и определяется принадлежностью его соответствующему прямолинейному участку (указанному выше); на фиг. 15 - контур изображения. .
Устройство для выделения контура изображения состоит из матрицы ячеек 1 обработки изображения, каждая из которых содержит фотоприемный элемент 2. первый 3, второй 4, третий 5, четвертый 9, пятый 13, шестой 10, седьмой 11, восьмой 14, девятый 12, десятый 15, одиннадцатый 6, двадцатый 7 и тринадцатый 8 элементы И, первый 16 и второй 17 элементы И-НЕ. элементы ИЛИ- НЕ 18, первый 19 и второй 20 сумматоры по модулю 2, элемент И-ИЛ И 21, элемент ИЛИ 22, элемент НЕ 23 и триггер 24, Первый элемент И-НЕ 16, в отличие от прототипа, имеет восемь входов. Входы 25-32 первого элемента И-НЕ 16 через соответствующие шины 33 соединены с фотоприемными элементами 2 смежных ячеек 1. Примем входы 25-32 первого элемента И-НЕ 16 подключены к фотоприемным элементам 2 смежных ячеек 1. отвечающим положениям Хч-Хв соответственно (см. фиг.2). Выход первого элемента И-НЕ 16 подключен к второму входу первого элемента И 3. первый вход которого
соединен с выходом фотоприемного элемента 2 и шиной 33 данной ячейки 1. а выход первого элемента И 3 подключен к входу триггера 24. Прямой выход триггера 24 подключей к выходной шине 34 данной ячейки 1 и к первым входам второго 4 и третьего 5 элементов И. Выход элемента НЕ 23 подключен к второму входу третьего элемента И 5.
Входы элемента ИЛ И-НЕ 18 соединены с третьим входом третьего элемента И 5, с первыми входами одиннадцатого 6, двенадцатого 7 и тринадцатого 8 элементов И соответственно, с первым и вторым входами
5 первого 19 и второго 20 сумматоров по модулю 2 соответственно, с первым и вторым входами пятого 13 и восьмого 14 элементов И соответственно и с выходами четвертого 9, шестого 10, седьмого 11 и девятого 12
0 элементов И соответственно, входы 35-42 которых через соответствующие выходные шины 34 соединены с прямыми выходами триггеров 24 смежных ячеек 1, соответствующие фотоприемные элементы 2 которых
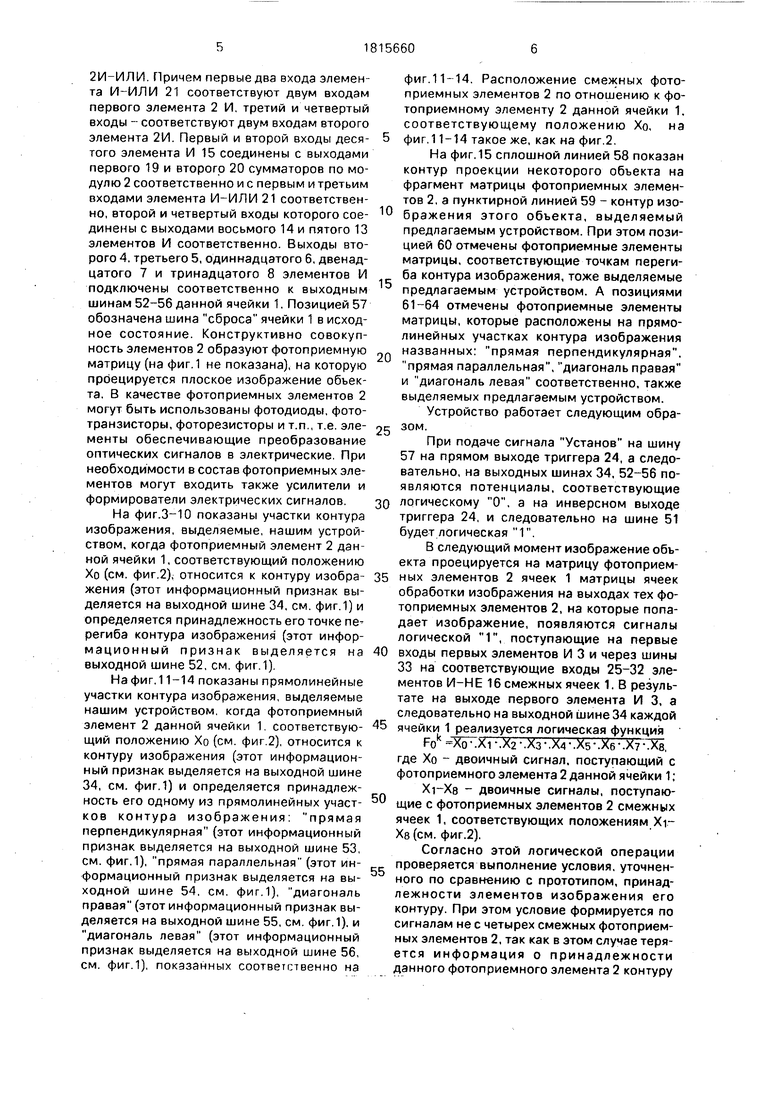
5 расположены по разные стороны от фотоприемного элемента 2 данной ячейки 1. Входы 35 и 36 четвертого элемента И 9 данной ячейки 1 подключены к прямым выходам триггеров 24 смежных ячеек 1, соответству0 ющих положениям Xi и Хб(см. фиг.2); входы 37 и 38 шестого элемента И 10 - соответствующих положениям Хз и Х(см. фиг.2); входы 39 и 40 седьмого элемента И 11 - соответствующих положениям Х2 и XR (см.
5 фиг.2); входы 41 и 42 девятого элемента И 12 - соответствующих положениям и Xs (см. фиг.2) фотоприемный элемент 2 данной 8 ячейки 1 соответствует положению Хо (см. фиг.2). Входы 43-50 второго элемента И-НЕ
0 17 через соответствующие шины 51 соединены с инверсными выходами триггеров 24 смежных ячеек 1. Причем входы 43-50 второго элемента И-НЕ 17 подключены к инверсным выходам триггеров 24 смежных
5 ячеек 1, отвечающим положениям Xr-Xs соответственно (см. фиг.2).
Выход второго элемента И-НЕ 7 подключен к третьему входу второго элемента И 4, второй вход которого соединен с выхо0 дом элемента НЕ 23. выход которого подключен к вторым входам одиннадцатого 6. двенадцатого 7 и тринадцатого 8 элементов И. третьи входы которых соединены с прямым выходом триггера 24. Выход элемента
5 ИЛИ 22 подключен к входу элемента НЕ 23, а входы соединены с выходами пятого элемента И 1.3. восьмого 14 и десятого 15 элементов И. элемента И-ИЛИ 21 и элемента ИЛИ-НЕ 18 соответственно. Элемент И-ИЛИ 21 конструктивно выполнен в виде 2И
2И-ИЛИ. Причем первые два входа элемента И-ИЛИ 21 соответствуют двум входам первого элемента 2 И, третий и четвертый входы - соответствуют двум входам второго элемента 2И. Первый и второй входы десятого элемента И 15 соединены с выходами первого 19 и второго 20 сумматоров по модулю 2 соответственно и с первым и третьим входами элемента И-ИЛИ 21 соответственно, второй и четвертый входы которого соединены с выходами восьмого 14 и пятого 13 элементов И соответственно. Выходы второго 4. третьего 5, одиннадцатого 6, двенадцатого 7 и тринадцатого 8 элементов И подключены соответственно к выходным шинам 52-56 данной ячейки 1. Позицией 57 обозначена шина сброса ячейки 1 в исходное состояние. Конструктивно совокупность элементов 2 образуют фотоприемную матрицу (на фиг.1 не показана), на которую проецируется плоское изображение объекта. В качестве фотоприемных элементов 2 могут быть использованы фотодиоды, фототранзисторы, фоторезисторы и т.п., т.е. элементы обеспечивающие преобразование оптических сигналов в электрические. При необходимости в состав фотоприемных элементов могут входить также усилители и формирователи электрических сигналов.
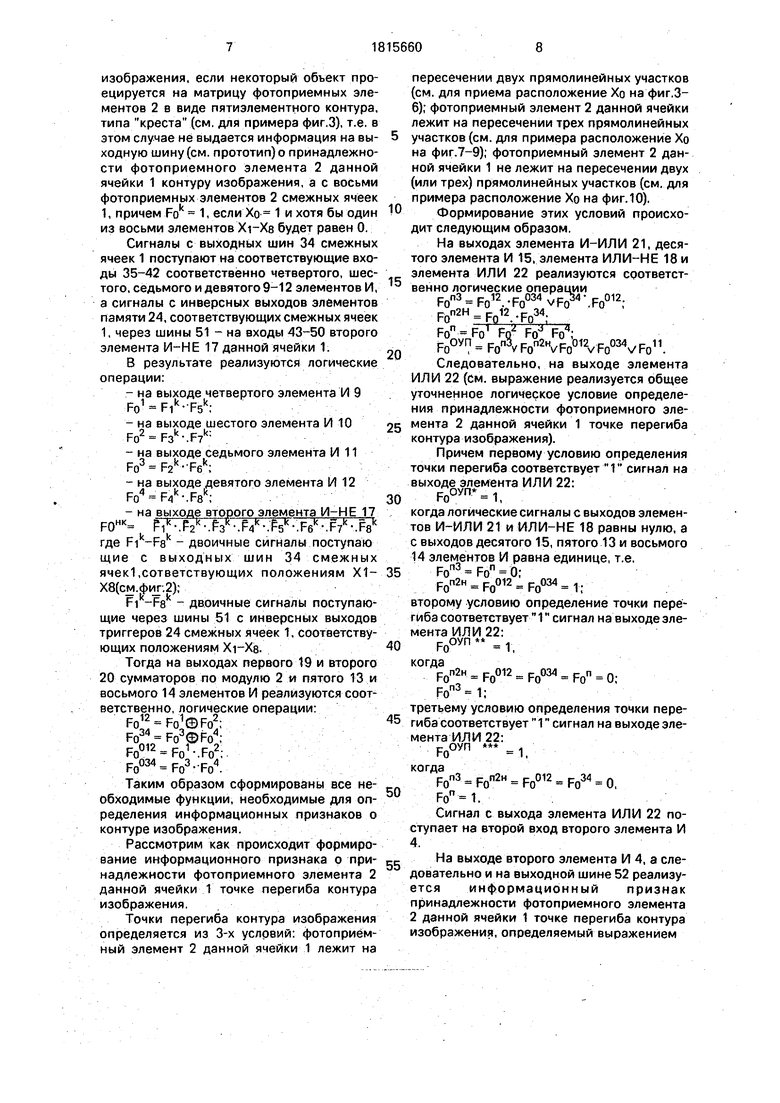
На фиг.3-10 показаны участки контура изображения, выделяемые, нашим устройством, когда фотоприемный элемент 2 данной ячейки 1, соответствующий положению Хо (см. фиг.2), относится к контуру изобра жения (этот информационный признак выделяется на выходной шине 34, см. фиг.1) и определяется принадлежность его точке пе региба контура изображения (этот информационный признак выделяется на выходной шине 52, см. фиг.1).
На фиг.11-14 показаны прямолинейные участки контура изображения, выделяемые нашим устройством, когда фотоприемный элемент 2 данной ячейки 1. соответствующий положению Хо (см. фиг.2), относится к контуру изображения (этот информационный признак выделяется на выходной шине 34, см. фиг.1) и определяется принадлежность его одному из прямолинейных участков контура изображения: прямая перпендикулярная (этот информационный признак выделяется на выходной шине 53, см. фиг.1), прямая параллельная (этот информационный признак выделяется на выходной шине 54, см. фиг.1), диагональ правая (этот информационный признак выделяется на выходной шине 55, см. фиг.1), и диагональ левая (этот информационный признак выделяется на выходной шине 56, см. фиг.1), показанных соответственно на
-
10
15
20
25
30
35
40
45
50
55
фиг.11-14. Расположение смежных фотоприемных элементов 2 по отношению к фотоприемному элементу 2 данной ячейки 1. соответствующему положению Хо, на фиг.11-14 такое же, как на фиг.2.
На фиг.15 сплошной линией 58 показан контур проекции некоторого объекта на фрагмент матрицы фотоприемных элементов 2, а пунктирной линией 59 - контур изображения этого объекта, выделяемый предлагаемым устройством. При этом позицией 60 отмечены фотоприемные элементы матрицы, соответствующие точкам перегиба контура изображения, тоже выделяемые предлагаемым устройством. А позициями 61-64 отмечены фотоприемные элементы матрицы, которые расположены на прямолинейных участках контура изображения названных: прямая перпендикулярная, прямая параллельная, диагональ правая и диагональ левая соответственно, также выделяемых предлагаемым устройством.
Устройство работает следующим образом.
При подаче сигнала Установ на шину 57 на прямом выходе триггера 24, а следовательно, на выходных шинах 34, 52-56 появляются потенциалы, соответствующие логическому О, а на инверсном выходе триггера 24, и следовательно на шине 51 будет логическая 1.
В следующий момент изображение объекта проецируется на матрицу фотоприемных элементов 2 ячеек 1 матрицы ячеек обработки изображения на выходах тех фотоприемных элементов 2, на которые попадает изображение, появляются сигналы логической 1, поступающие на первые входы первых элементов И 3 и через шины 33 на соответствующие входы 25-32 элементов И-Н Е 16 смежных ячеек 1. В результате на выходе первого элемента И 3, а следовательно на выходной шине 34 каждой ячейки 1 реализуется логическая функция
Fok Хо-.Хг.Х2-.Хз-.Х4 .Х5-.Хб-.Х7-.Х8,
где Хо - двоичный сигнал, поступающий с фотоприемного элемента 2 данной ячейки 1;
Xi-Хв - двоичные сигналы, поступающие с фотоприемных элементов 2 смежных ячеек 1, соответствующих положениям Хг- Хв (см. фиг.2).
Согласно этой логической операции проверяется выполнение условия, уточненного по сравнению с прототипом, принадлежности элементов изображения его контуру. При этом условие формируется по сигналам не с четырех смежных фотоприемных элементов 2, так как в этом случае теряется информация о принадлежности данного фотоприемного элемента 2 контуру
изображения, если некоторый объект проецируется на матрицу фотоприемных элементов 2 в виде пятиэлементного контура, типа креста (см. для примера фиг.З), т.е. в этом случае не выдается информация на выходную шину (см. прототип) о принадлежности фотоприемного элемента 2 данной ячейки 1 контуру изображения, а с восьми фотоприемных элементов 2 смежных ячеек 1, причем Fok 1, еслиХо 1 и хотя бы один из восьми элементов Xi-Xs будет равен 0.
Сигналы с выходных шин 34 смежных ячеек 1 поступают на соответствующие входы 35-42 соответственно четвертого, шестого, седьмого и девятого 9-12 элементов И, а сигналы с инверсных выходов элементов памяти 24, соответствующих смежных ячеек 1, через шины51-на входы 43-50 второго элемента И-НЕ 17 данной ячейки 1.
В результате реализуются логические операции:
.- на выходе четвертого элемента И 9
Fo
Fik-F5k;
- на выходе шестого элемента И 10 Fo2 F3k-.F7k:
- на выходе седьмого элемента И 11
-F6
.k.
- на выходе девятого элемента И 12
Fo4 FV
-F8K
FOH
на выходе второго элемента и-нь 1/ Fik-.F2k-.F3ir-.F4k-.F5k-.F6k-.F7k-.F8k где Fik-Fak - двоичные сигналы поступаю щие с выходных шин 34 смежных ячек1,сответствующих положениям Х1- Х8(см.фиг.2);
Fik-Fak - двоичные сигналы поступающие через шины 51 с инверсных выходов триггеров 24 смежных ячеек 1, соответствующих положениям Xi-Xe.
Тогда на выходах первого 19 и второго 20 сумматоров по модулю 2 и пятого 13 и восьмого 14 элементов И реализуются соответственно, логические операции:
Fo12 Fo1©F02;
Fo34 F03©FoV
Fol-.Fo2;.
Fo034 Fo3
Fo4
Таким образом сформированы все необходимые функции, необходимые для определения информационных признаков о контуре изображения.
Рассмотрим как происходит формирование информационного признака о принадлежности фотоприемного элемента 2 данной ячейки 1 точке перегиба контура изображения.
Точки перегиба контура изображения определяется из 3-х условий: фотоприёмный элемент 2 данной ячейки 1 лежит на
0
5
0
5
0
5
0
5
0
5
пересечении двух прямолинейных участков (см. для приема расположение Хо на фиг.З- 6); фотоприемный элемент 2 данной ячейки лежит на пересечении трех прямолинейных участков (см. для примера расположение Хо на фиг.7-9); фотоприемный элемент 2 данной ячейки 1 не лежит на пересечении двух (или трех) прямолинейных участков (см. для примера расположение Хо на фиг.10).
Формирование этих условий происходит следующим образом.
На выходах элемента И-ИЛИ 21, десятого элемента И 15, элемента ИЛИ-НЕ 18 и элемента ИЛИ 22 реализуются соответственно логические операции
Fon3 Fo12.-Fo034vFo34 .Fo012;
Fon2H Fol2.-Fo34.Fo F01 Fo FoJ Fo4;
Fo°yn Fon Fon%Fo012vFo°34vFo11.
Следовательно, на выходе элемента ИЛИ 22 (см. выражение реализуется общее уточненное логическое условие определения принадлежности фотоприемного элемента 2 данной ячейки 1 точке перегиба контура изображения).
Причем первому условию определения точки перегиба соответствует 1 сигнал на выходе элемента ИЛИ 22:
Fo°yn 1,
когда логические сигналы с выходов элементов И-ИЛИ 21 и ИЛИ-НЕ 18 равны нулю, а с выходов десятого 15, пятого 13 и восьмого 14 элементов И равна единице, т.е.
Fon3 Fon 0;
Fon2H Fo012 Fo034 1.
второму условию определение точки перегиба соответствует сигнал на выходе элемента ИЛИ 22:
„ОУП
1,
.012
Fo Fon 0.
F0
когда
Р0Плм Рои
третьему условию определения точки перегиба соответствует 1 сигнал на выходе элемента ИЛИ 22:
ОУП
Fo когда
пЗ
Fo™ Fo1
1,
п2н с„012 ,
Fo34 0,
.
Сигнал с выхода элемента ИЛИ 22 поступает на второй вход второго элемента И 4.
На выходе второго элемента И 4, а следовательно и на выходной шине 52 реализуется информационный признак принадлежности фотоприемного элемента 2 данной ячейки 1 точке перегиба контура изображения, определяемый выражением
г- тп г- k c Hk г- ОУП Fo FO . Fo Fo
При этом, если Fo 1, a FOH 0, т.е. контур изображения представляет только одну точку, то, в отличие от прототипа, выдающего еще и признак о точке перегиба, информационного приемника о точке перегиба не будет (FTn 0), а будет только информация на выходной шине 34 (фиг.1) о принадлежности фотоприемного элемента 2 данной ячейки 1 (см. Хо на фиг.2) одноэлементному контуру изображения, т.е. точке.
Рассмотрим, как происходит формирование информационных признаков о принадлежности фотоприемного элемента 2 данной ячейки 1 прямолинейным участкам контура изображения.
Сигнал с выхода элемента ИЛИ 22 через элемент НЕ 23 поступает на вторые входы соответственно третьего, одиннадцатого, двенадцатого и тринадцатого элементов И 5-8, на выходе которых, а следовательно и на выходных шинах 53-56 (фиг.1) соответственно реализуются информационные признаки принадлежности фотоприемного элемента 2 данной ячейки 1 прямолинейным участкам контура изображения, определяемые выражениями:
FonA Fok .Fo°yn. -Fo1 - прямолинейный участок типа прямая перпендикулярная (см. фиг,11);
Fonn F0k. -Fooyn. -Fo2 - прямая параллельная, (см. фиг. 12):
Родп Fok .Fooyn. Fo3 - диагональ правая (см. фиг.13);
Fo™ F0k. -Fo°yn. -Fo - диагональ левая (см. фиг. 14).
В предлагаемом устройстве происходит выделение любого из четырех информационных признаков о прямолинейном участке, в отличие от прототипа, где может быть информационным признак о нахождении фотоприемного элемента 2 данной ячейки 1 на прямолинейном участке, когда данный фотоприемный элемент 2 может находится на одном или на пересечении двух диагональных (т.е. на точке перегиба) прямолинейных участков контура изображения.
Так происходит проверка выполнения условий о принадлежности элементов изображения его контуру и определения информационных признаков о контуре изображения.
Пример контура изображения, выделяемого нашим устройством с показом инфор- мационных признаков о контуре изображения представлен на фиг. 15.
Таким образом, введение новых элементов позволяет существенно повысить селективность и точность устройства, выделить не только контур изображения, но и определить информационные признаки о контуре изображения, такие как точки перегиба и прямолинейные участки. При этом еще происходит и классификация прямолинейных участков. А наличие триггера в схеме ячейки обработки изображения обеспечивает сохранность информации на выходных шинах после снятия изображения
с матрицы фотоприемных элементов.
Положительный эффект по сравнению с прототипом состоит в том, что введение в каждую ячейку обработки изображения двенадцатого и тринадцатого элементов И. первого и второго сумматора по модулю 2. элемента И-ИЛИ и второго элемента И-НЕ позволяет повысить точность выделения контура изображения сложной конфигурации определения предлагаемым устройством. за счет уточнения условия принадлежности элементов изображения его контуру и определения дополнительных информационных признаков о контуре изображения, таких как точки перегиба и прямолинейные участки, а также классификации прямолинейных участков контура изображения, в отличие от прототипа, во-первых, путем формирования условия определения принадлежности элементов
изображения его контуру с использованием восьми фотоприемных элементов смежных ячеек, а на четырех, так как в этом случае теряется информация о пятиэлементном контуре в виде креста : во-вторых, путем
дополнительного получения информационных признаков о точках перегиба контура изображения и при условии, что данный фотоприемный элемент находится на пересечении любых двух или трех прямолинейных
участков: в третьих, путем выделения ин- формационныл признаков о четырех прямо- лиТ ейных участках - прямая перпендикулярная, прямая параллельная, диагональ правая и диагональ левая : в-четвертых, путем определения принадлежности данного фотоприемного элемента только контуру изображения, т.е. точке, если с выходов всех (восьми) соответствующих исправных фотоприемных элементов смежных ячеек не будут поступать на входы данной ячейки единичные сигналы.
Формула изобретения Устройство для выделения контура изображения, содержащее матрицу ячеек обработки изображений, каждая из которых состоит из фотоприемного элемента, выход которого соединен с первым входом первого элемента И, второй вход которого соединен с выходом первого элемента I/1-HE. входы которого являются входами ячейки, триггера, прямой вход которого подключен к выходу первого элемента И, инверсный вход - к входу Сброс матрицы ячеек обра- ботки изображений, прямой выход - к первым входам второго и третьего элементов И и выходной шине ячейки, четвертого элемента И, выход которого соединен с первым входом пятого элемента И. шестого элемен- та И, выход которого подключен к второму входу пятого элемента И, седьмого элемента И, выход которого соединен с первым входом восьмого элемента И. второй вход которого подключен к выходу девятого эле- мента И, элемента ИЛИ. первый, второй и третий входы которого соединены с выходами пятого, восьмого и десятого элементов И соответственно, а выход - с вторым входом второго элемента И и входом элемента НЕ, выход которого подключен к второму входу третьего элемента И, элемента ИЛИ-НЕ, входы четвертого, шестого, седьмого и девятого элементов И являются входами ячейки, а выходы второго и третьего элементов И - выходами ячейки, одиннадцатый элемент И, отличающееся тем, что. с целью повышения точности устройства, каждая ячейка обработки изображения дополнительно содержит второй элемент И-НЕ, вы- ход которого соединен с третьим входом
второго элемента И. а входы являются входами ячейки и подключены к соответствую- щ-им инверсным выходам триггеров смежных ячеек, двенадцатый и тринадцатый элементы И, первые входы одиннадца- того-тринадцатого элементов И соединены с выходами шестого, седьмого и девятого элементов И соответственно, вторые входы - с выходом элемента НЕ, третьи входы - с прямым выходом триггера, а выходы являются выходами ячейки, первый и второй сумматоры по модулю два, первые входы которых подключены к выходам четвертого и седьмого элементов И, а вторые входы - к выходам шестого и девятого элементов И соответственно, элемент И-ИЛИ. входы которого соединены с выходами первого сумматора по модулю два, восьмого элемента И, второго сумматора по модулю два. пятого элемента И, а выход - с четвертым входом элемента ИЛИ, пятый вход которого подключен к выходу элемента ИЛИ-НЕ. входы которого соединены с выходами четвертого шестого, седьмого и девятого элементов И. прямой выход триггера, являющийся выходом ячейки, подключен к соответствующим входом смежных ячеек, соединенных с входами четвертого, шестого, седьмого и девятого элементов И, третий вход третьего элемента И подключен к выходу четвертого элемента И.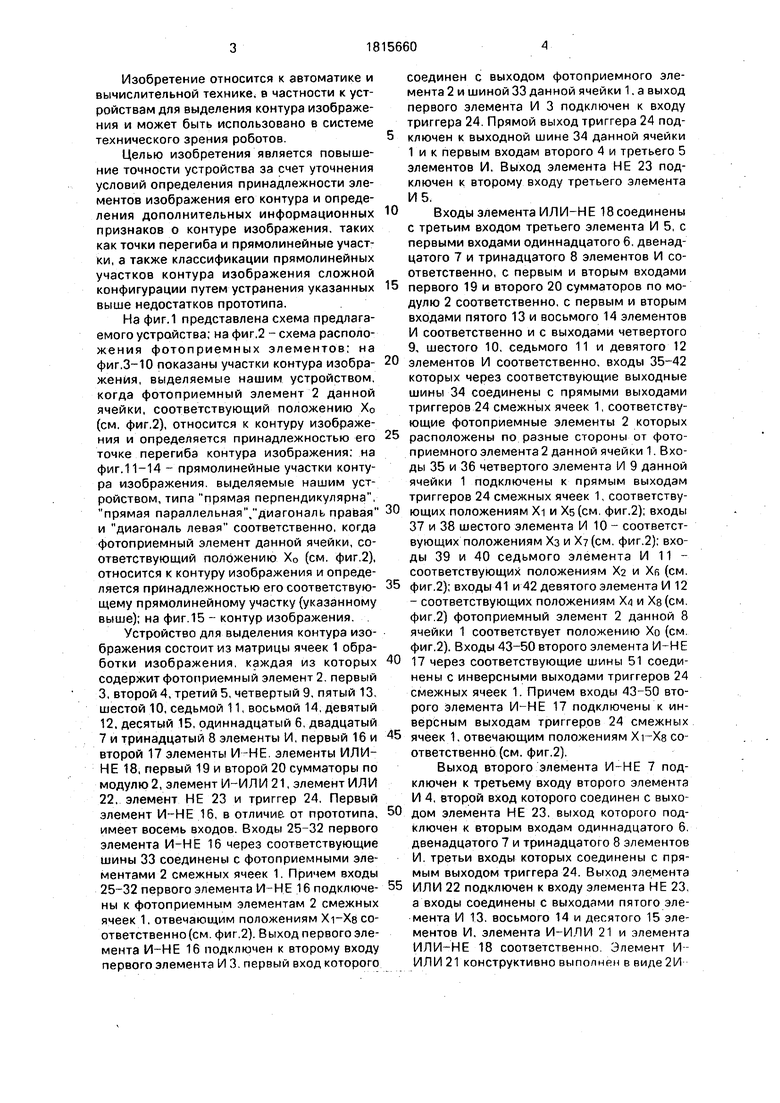
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выделения контура бинарного изображения | 1989 |
|
SU1661805A2 |
| Устройство для выделения контура изображения | 1989 |
|
SU1642486A2 |
| Устройство для выделения контура изображения | 1984 |
|
SU1257674A1 |
| Устройство для выделения контура изображения | 1988 |
|
SU1538176A2 |
| Устройство для выделения контура изображения | 1987 |
|
SU1444837A1 |
| Устройство для обработки и считывания изображений | 1989 |
|
SU1661809A1 |
| Устройство для считывания изображений | 1986 |
|
SU1429142A1 |
| Устройство для выделения контура изображения | 1990 |
|
SU1737471A1 |
| Устройство для выделения контура изображения объектов | 1989 |
|
SU1718250A1 |
| Устройство для считывания изображений | 1987 |
|
SU1524074A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах технического зрения роботов. Цель изобретения - повышение точности устройства за счет уточнения условий определения принадлежности элементов изображения его контуру и определения дополнительных информационных признаков о контуре изображения, таких как точки перегиба и прямолинейные участки, а также классификации прямолинейных участков контура изображения сложной конфигурации. Цель достигается тем, что устройство содержит матрицу ячеек 1 обработки изображений, каждая из которых состоит из фотоприемного элемента 2, тринадцати элементов И 3-15, двух элементов И-НЕ 16,17, элемента ИЛИ-НЕ 18, двух сумматоров по модулю два 19, 20, элемента И-ИЛИ 21, элемента ИЛИ 22, элемента НЕ 23 и триггера 24. Новым в устройстве является уточнение условий определения принадлежности элементов изображения его контуру и определение дополнительных информационных признаков о контуре изображения, а также классификации прямолинейных участков. 15 ил. w fe
%2
Хз
Xv
.,
Фиг. 2 Фи-г. 5 ФнгЛ Фнг5
.- Х«.
;
Фи г 7 Фиг 8 Фиг. 9 Фиг. 10 -Фцг.Ц
..&. & .
Фиг 6
х0;
.
Ф/УГ. /3
| Устройство для выделения контура изображения | 1984 |
|
SU1257674A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для выделения контура изображения | 1987 |
|
SU1481812A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
