Изобретение относится к области вычислительной техники, предназначено для обработки изображений в системах технического зрения роботов и является усовершенствованием основного изобретения по авт.св. № 1451741.
Цель изобретения - повышение точности устройства.
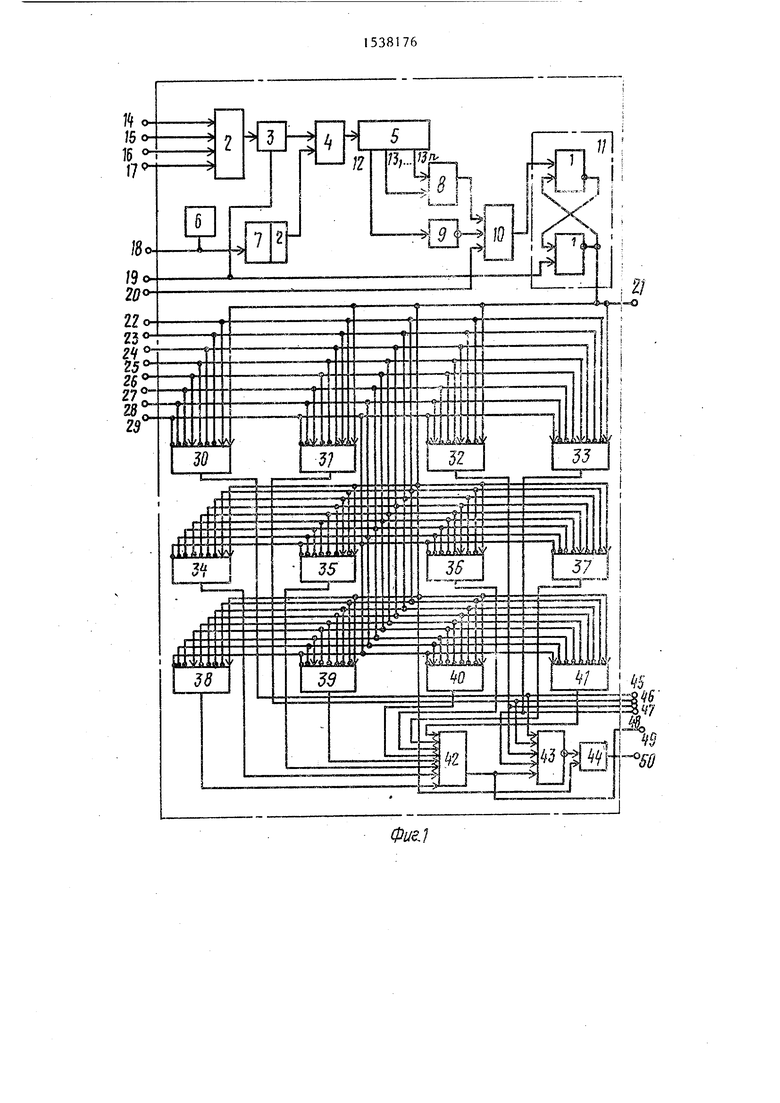
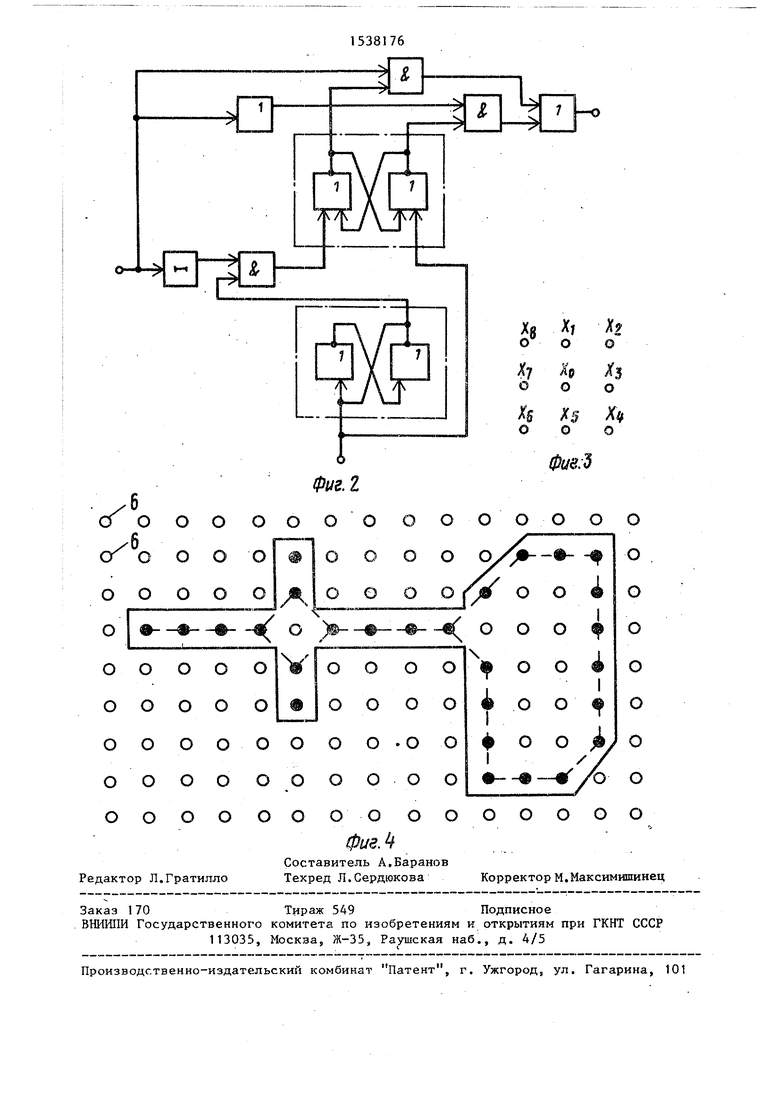
На фиг.1 приведена схема устройства; на фиг.2 - схема преобразователя кода; на фиг. 3 - схема расположения фотоприемных элементов и соответствующих ячеек обработки изображения; на фиг.4 - контур изображения и основные его информационные признаки, выделяемые устройством.
Устройство состоит из матрицы ячеек 1 обработки изображения, каждая из которых содержит первый сумматор 2, преобразователь 3 кода, второй сумматор 4, регистр 59 фотоприемный элемент 6, элемент 7 задержки,первый
8 элемент ИЛИ, элемент НЕ 9, первый 10 элемент И, элемент 11 памяти,выход 12 знакового разряда регистра 5, выходы 13 ,,,..„, 13 п значащих разрядов регистра 5, специальные шины 14-29, первый 30, второй 31, третий 32,четвертый 33, пятый 34, шестой 35, седьмой 36, восьмой 37, девятый 38, десятый 39, одиннадцатый 40, двенадцатый 41 элементы НЕ-И, второй 42 элемент ИЛИ, элемент ИЛИ-НЕ, второй 44 элемент И, специальные шины 45-50.
Устройство работает следующим образом.
Работа устройства начинается с подачи .единичного сигнала Установ на шину 19.
После этого изображение объекта проецируется на матрицу фотоприемных элементов 6, На выходах тех фотоприемных элементов 6, на которые попадает изображение объекта, появляются
С
sm&
сл со
ч|
оэ
го
3153
последовательные двоичные положительные п + 1 разрядные числа в прямом шде, значения которых соответствуют освещенности в соответствующих точках изображенияр а на выходах остальных элементов 6 фотоприемной матрицы появляются нулевые сигналы,Эти сигналы поступают на вход линии 7 {задержки соответствующих ячеек 1 и через их шины 18 подаются на соответствующие входы 14-17 первого сумматора 2 смежных ячеек 1 Линия 7 (задержки осуществляет задержку на 2 такта времени двоичного п+1 разряд- ного прямого кода (Х0)Пр (Х0„, Х0, ,. . ., ХОГ1) , поступающего с выхода фотоприемного элемента 6 данной ячейки i (т.ев осуществляет сдвиг указанного кода на 2 разряда в сто™ рону старших разрядов) и, следовательно, на выходе схемы 7 появляется последовательный прямой двоичный код числа (4Х0)Пр„ Первый сумматор 2 осуществляет суммирование двоич- ньпс п+1 разрядных последовательных прямых кодов,, поступающих на его входы 14-17 через шины 18 с выходов фотоприемных элементов 6 смежных ясте- ек 1э соответствующих изложениям X,, Х3, Х5, Хт (фиг.ЗК Нч иыхоцс первого сумматора 2 реализуется опь- рация
(Xjnp + (Х5)пр + (Х7)пр,
(Х(0 ,, о. „ ,X1h )rij ;
- v X io э „ о „, X зк ) np ;,
v v
s -5(1 J np
Xso ч (X 0 5,
X7ri),1p
последовательные п + 1 разрядные прямые коды8 поступающие с выходов 45 фотоприемных элементов 6 смежных ячеек 1 , соответствующих положениям Х, Х3, Х5, X 7 (фиГоЗ).
Величина (Y,) Пр с выхода первого сумматора 2 поступает на вход 50 (фиг„2) схемы преобразования прямого кода в дополнительный 3 (фиг„О, которая под действием единичного сигнала Уставов настроена на реализацию операции %55
Y) } Пр s в соответствии с которой прямой код
(Y
Р
положительного поеледоваiель0 5 Q
5
ного двоичного числа Y преобразуется в дополнительный код (-Y,j)ion отрицательного двоичного числа -Y, . Величина (-Y,) Доп с выхода схемы 3 (фиг,l) поступает на первый вход второго сумматора 4, В этот хе момент времени на второй вход второго сумматора 4 с выхода линии 7 задержки пос.тупает величина (4Х0)пр„ В результате на выходе второго сумматора 4 образуется п+1 разрядный двоичный дополнительный код суммы (Y 2) (4Х0)П + (У,)доп9 которьй в течение п+1 тактов времени записывается в регистр 5. В п+2 такт времени на шину 20 (фигЛ) подается единичный управляющий сигнал длительностью в 1 такт, который поступает FJ. третий вход первого элементз И 100 Оциовре- менно па первый к второй входы первого элемента К 10 поступают сигналы соответственно с выходел первого элемента ИЛИ 8 и элемента ИЛИ 9,. При этом, первый элемент ИЛИ 8 реализует логическую функцию
Ya,V YUV,...,V Yatl, ,
где Y7, , Y41,... ,Y 2tt - значащие, разряды двоичного дополнительного ко- (с )доп в соответстзии с которой осуасствляется проверка условия наличия хотя бы одного единичного знача- дего разряда величины ( а эле мент НЕ 9 осуществляет инверсию знакового разряда Y io числа (Y2)on. В результате на выходе первого элемента И 10 реализуется функция
Sign(Yj
1, если (Уг)Доя 0;
Аоп | о, если (Y2)Aon 0.
В соответствии с этой функцией проверяется условие принадлежности анализируемой точки X. полутонового или бинарного изображения его контуру, которое фиксируется элементом 11 памяти, на выходе которого появляется величина Z0 Sign(Y;)Aon „ При этом происходит переход от произвольного (полутонового или бинарного) исходного изображения к бинарному контурному изображению, что позволяет использовать довольно несложные логические схемы для его дальнейшего анализа.
Выходные сигналы Z, - Z g элемен- тов 1 1 памяти через шины 21 смежных ячеек 1, соответствующих положениям
51538
X j - Xg (фиг.З),поступают соответственно на тины 22 - 29 данной ячейки 1, соответствующей положению Х0 (фиг„3).
Указанные сигналы Zj - Z8, а также выходной сигнал Z0 элемента 11 памяти данной ячейки 1 поступают на соответствующие входы (фиг.1) первого 30, второго 31, третьего 32, чет- вертого 33, пятого 34, шестого 35, седьмого 36, восьмого 37, девятого 38, десятого 39, одиннадцатого 40,, двенадцатого 41 элементов НЕ-И данной ячейки 1„ В результате (фиг„0 на выходе первого элемента НЕ-И 30 реализуется логическая функция
F - Zo- Z , Z Z
ч Z7- Z&s
4z,- z€
в соответствии с которой проверяется условие принадлежности анализируемой точки X контуру ,(т.е. когда Z0 1) и одновременно наличие на данном фрагменте контура только двух его точек X,(Zt l) и X5(Z5 1), расположенных по разные стороны от точки изображения, т.е. происходит выделение прямолинейного участка контура с вертикальной ориентацией (фиг.3).
На выходе второго 31 элемента НЕ-И реализуется логическая функция
z, z
V
Z5 Z6
в соответствии с которой проверяется условие принадлежности точки Х0 контуру и одновременно наличие на данном фрагменте контура линейного участка, ориентированного в соответствии с прямой, проведенной через точки Хг, Х0 и Х6 (фиг03), т.е. происходит выделение прямолинейного участка контура указанной ориентации.
На выходе третьего 32 элемента НЕ-И реализуется логическая функция
F} Z0- Z,1 Z4 Z э Z 4
z
zб Z 7 zg
в соответствии с которой проверяется условие принадлежности анализируемой точки Х0 контуру и одновременно наличие на данном фрагменте контура линейного участка, ориентированного в соответствии с прямой, проведенной через точки Х3, Х0 и Х7 (фиг.З), т,е, происходит выделение горизонтального линейного участка контура изображения.
На выходе четвертого 33 элемента НЕ-И реализуется логическая функция
F. Z0. Z,2. Ъ 4-
5
0
5
0
z.
Z«.
J5 6 1 gl
в соответствии с которой проверяется условие принадлежности анализируемой точки контуру и одновременно наличие на данном фрагменте контура линейного участка, ориентированного в соответствии с прямой, проведенной через точки Х, Х0 и X. (фиг„3), т.е. происходит выделение прямолинейного участка контура указанной ориентации,. Таким образом, на выходах первого 30, второго 31, третьего 32 и четвертого 33 элементов НЕ-И происходит выделение прямолинейных участков контура всех возможных ориентации.
На выходах пятого 34,шестого 35, седьмого 36, восьмого 37, девятого 38, десятого 39, одиннадцатого 40 н двенадцатого 41 элементов НЕ-И реализуются соответственно логические функции
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СПЕКТРАЛЬНОГО ОБНАРУЖЕНИЯ И КОРРЕКЦИИ ОШИБОК В КОДАХ ПОЛИНОМИАЛЬНОЙ СИСТЕМЫ КЛАССОВ ВЫЧЕТОВ | 2008 |
|
RU2390051C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЧИСЛА ИЗ ПОЛИНОМИАЛЬНОЙ СИСТЕМЫ КЛАССОВ ВЫЧЕТОВ В ПОЗИЦИОННЫЙ КОД С КОРРЕКЦИЕЙ ОШИБКИ | 2006 |
|
RU2309535C1 |
| УСТРОЙСТВО СПЕКТРАЛЬНОГО ОБНАРУЖЕНИЯ И КОРРЕКЦИИ ОШИБОК В КОДАХ ПОЛИНОМИАЛЬНОЙ СИСТЕМЫ КЛАССОВ ВЫЧЕТОВ | 2005 |
|
RU2301441C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ИЗ ПОЛИНОМИАЛЬНОЙ СИСТЕМЫ КЛАССОВ ВЫЧЕТОВ В ПОЗИЦИОННЫЙ КОД | 2008 |
|
RU2409840C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ИЗ ПОЛИНОМИАЛЬНОЙ СИСТЕМЫ КЛАССОВ ВЫЧЕТОВ В ПОЗИЦИОННЫЙ КОД С ПЕРЕСЧЕТОМ ОРТОГОНАЛЬНЫХ БАЗИСОВ | 2005 |
|
RU2298873C1 |
| Устройство для выделения контура изображения | 1990 |
|
SU1815660A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ КОЭФФИЦИЕНТОВ ОБОБЩЕННОЙ ПОЛИАДИЧЕСКОЙ СИСТЕМЫ С КОРРЕКЦИЕЙ ОШИБОК | 2015 |
|
RU2584495C1 |
| Способ диагностирования измерительного преобразователя | 1987 |
|
SU1479901A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ИЗ ПОЛИНОМИАЛЬНОЙ СИСТЕМЫ КЛАССОВ ВЫЧЕТОВ В ПОЗИЦИОННЫЙ КОД | 2013 |
|
RU2513915C1 |
| УСТРОЙСТВО ДЕКОДИРОВАНИЯ КАСКАДНОГО КОДА РИДА-СОЛОМОНА | 1993 |
|
RU2036512C1 |
Изобретение относится к вычислительной технике и предназначено для использования в системах технического зрения роботов. Цель изобретения - повышение точности устройства. Это достигается тем, что в каждую ячейку устройства для выделения контура изображения введены двенадцать элементов НЕ-И, элемент ИЛИ, элемент ИЛИ-НЕ и элемент И, что позволит не только выделять контур изображения, но и выделять прямолинейные участки контура различной ориентации, концевые точки контура и точки его перегиба. 4 ил.
Z0 Z,-Z4- Z,- Z5 Zg-ZT-Zgj
Z0. Z,-Za- Z Z4- Z ZV Z7-Za;
Z0 Z,-Zi %ъ Z$ Zg1Z7-Z8;
Z0 Zt Za Z Z Zg- Z6-ZT Zg;
Z0 Z,-Z4- Z5- ZV Z,- Z.6-ZT-Z8;
Z0 Z, Z,- I4- Zy Z6-ZT-Z8;
Z0 Z,-Zf Z4- 6-ZT-Z6;
Z0 VZa- ,- ZY Z6-ZT-Zg,
в соответствии с которыми проверяется условие принадлежности анализируемой точки Х0 контуру и одновременно Йапичие только одной соседней контур- Ной точки X, или Х2, или Х-, или Х или Х5, или Х6, или Х7 9 или Xg, т.е. происходит выделение всех воз- кожных положений концевой точки контура, Выходные сигналы F - F. пято- ю го 34, шестого 35, седьмого 36,, восьмого 37 9 девятого 389 десятого 39, одиннадцатого 40 и двенадцатого 41 элементов НЕ-И поступают на входы второго 42 элемента ИЛИ, на выходе t5 которого реализуется функция
FTV FUV F VF10VFHY
I V F14 ,
JB соответствии с которой происходит 20
логическое объединение функций F FtЈ, т.е. выделение концевой точки
контура при любых возможных ее поло
жениях.
Выходные сигналы F, -- F4 перво- 25 го 30, второго 31, третьего 32 и четвертого 33 элементов НЕ-И и выходной сигнал второго 42 элемента ИЛИ поступают на входы элемента ИЛИ--НЕ 43, выход которого подключен к входу 30 второго 44 элемента И, на второй вход которого поступает выходной cnrnaj Z0 элемента 1 , В рлзуль - те на выходе второго 4ч элемента реализуется логическая функция ,,.
FaV F3VF4 F,3 ) Z.
в соответствии с которой проверяемся условие принадлежности анализируемой точки Х0 контуру и одновременно, 40
15381768
когда эта точка Х0 не принадлежит прямолинейному участку контура и не является концевой, происходит выделение точек перегиба контура.
Формула изобретения
Устройство для выделения контура изображения по авт.св. № 1451741, отличающееся тем, что, с целью повышения точности, в каждую ячейку обработки изображения введены первый - двенадцатый элементы НЕ-И, первые входы которых подключены к выходу элемента памяти данной ячейки, который являетез первым выходом матрицыt другие одноименные входы элементов НЕ-И объединены и подключены к выходам элементов памяти соответствующих смежных ячеек обработки изображения, элемент ИЛИ-НЕ, входы которого подключены соответственно к выходам первого, второго, третьего и четвертого элементов НЕ-И, второй элемент ИЛИ, входы которого подключены соответственно к выходам пятого - двенадцатого элементов НЕ-И, которые являются соответ- ствэнно вторым, третьим, чрт ертым и пятым выходами матрицы, и к выходу втооого элемента ИЛИ, который являет- fя шестым выходом матрицы, второй элемент И первый вход которого подключен к выходу элемента памяти данной ячейки обработки изображения, а второй вход соединен с выходом элемента ИЛИ-НЕ, выход второго элемента И является седьмым выходом матрицы,
| Устройство для выделения контура изображения | 1987 |
|
SU1451741A1 |
