(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1990 |
|
SU1741223A2 |
| СПОСОБ ПРОТИВОАВАРИЙНОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ТУРБОГЕНЕРАТОРА БЛОЧНОЙ ТЕПЛОВОЙ ЭЛЕКТРОСТАНЦИИ (ВАРИАНТЫ) | 2010 |
|
RU2412512C1 |
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1989 |
|
SU1617531A1 |
| Способ противоаварийного управления мощностью турбин | 1980 |
|
SU868918A1 |
| Способ противоаварийного управления активной мощностью энергоблоков электростанции | 1988 |
|
SU1644355A1 |
| Способ автоматического регулирования мощности первичного двигателя генератора | 1977 |
|
SU748773A1 |
| Устройство для автоматического управления активной мощностью турбогенератора | 1979 |
|
SU888324A2 |
| Способ автоматического регулирования мощности первичного двигателя генератора | 1977 |
|
SU700912A1 |
| Способ предотвращения нарушения статической устойчивости линии электропередачи | 1977 |
|
SU699608A1 |
| Способ автоматической аварийной раз-гРузКи ТуРбОгЕНЕРАТОРА элЕКТРОСТАНции | 1979 |
|
SU849378A1 |
Область использования: может быть использовано на электрических станциях, оснащенных асинхронными генераторами (АГ) и источниками реактивной мощности для управления переходными режимами. Сущность изобретения: контролируют отклонение первой производной скольжения АГ от величины уставки и при положительном знаке отклонения формируют дополнительный сигнал управления, пропорциональный максимальному отклонению скорости изменения скольжения АГ, которым на заданном интервале времени уменьшают мощность первичного двигателя асинхронного генератора. Это позволяет повысить устойчивость электроэнертетической системы путем локализации аварийного возмущения. 1 ил.
Изобретение относится к электротехнике и может быть использовано на электрических станциях, оснащенных асинхронными генераторами (АГ) и источниками реактивной мощности (ИРМ) для управления переходными режимами.
Цель изобретения - повышение устойчивости электроэнергетической системы путем локализации аварийного возмущения.
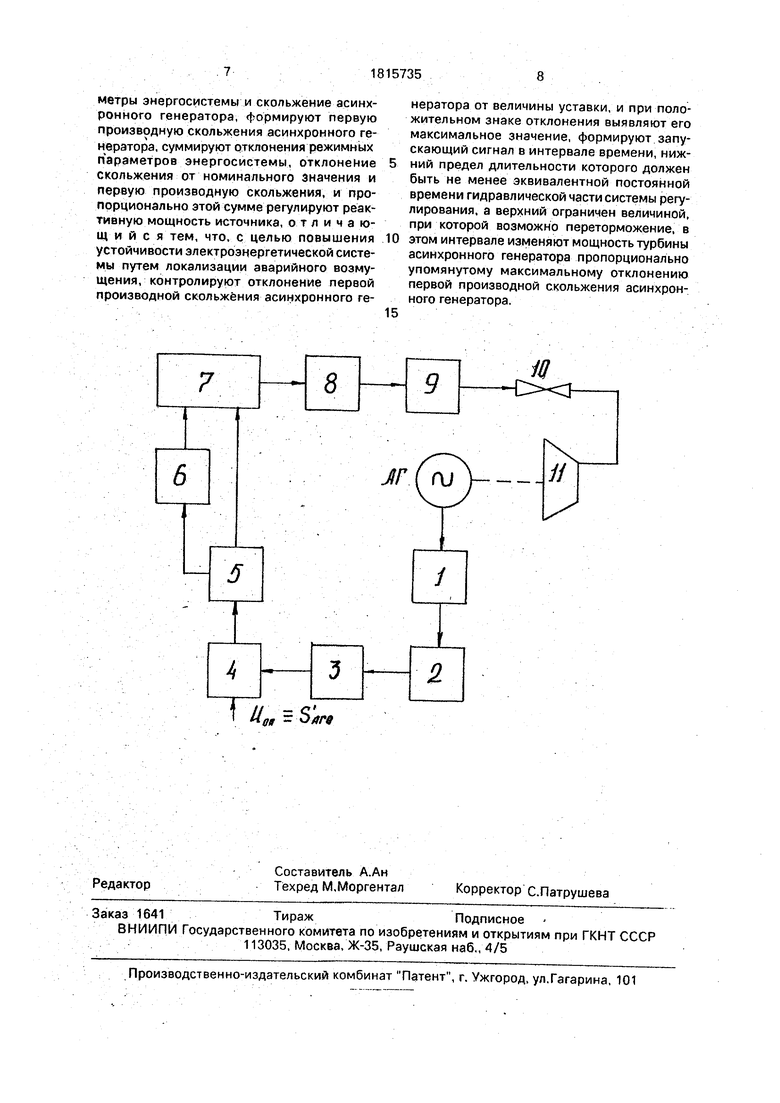
Осуществление способа поясняется с помощью блок-схемы устройства, приведенной на чертеже.
Устройство содержит датчик 1 измерения скольжения АГ, согласующий блок 2, дифференцирующий блок 3, блок 4 сравнения, максиселектор 5, усилитель 6, блок 7 аварийного регулирования турбины, электрогидравлический преобразователь 8, гидравлическую часть системы регулирования
9, регулирующие клапаны 10 и турбину 11. Измерительный датчик 1 связан непосредственно с валом ротора асинхронного генератора. Выход датчика 1 скольжения АГ подсоединен к входу согласующего блока 2, выход которого связан с входом дифференцирующего блока 3. Выход блока 3 дифференцирования соединен с одним из входов блока 4 сравнения, на другой вход которого подается опорное напряжение, пропорциональное величине заданной уставки по первой производной скольжения АГ, а выход блока 4 подключен к входу максиселектора 5, один из выходов которого связан с блоком 7 аварийного регулирования турбины непосредственно, а другой - через усилитель 6. Выход блока 7 подсоединен к входу элек-, трогидравлического преобразователя 8, выход которого связан с входом
00
ел
XI Сл СЛ
гидравлической части системы регулирования 9, выход которой подсоединен к регулирующим клапанам 10 турбины 11.
В данной блок-схеме датчик 1 служит для определения величины текущего скольжения асинхронного генератора в виде постоянного напряжения, а согласующий блок 2 -для согласования величины напряжения на выходе датчика скольжения с входом блока 3 дифференцирования. Дифференцирующий блок предназначен для формирования сигнала, пропорционального скорости изменения скольжения АГ. Блок 4 сравнения выполняет функцию измерения отклонения текущего значения первой производной скольжения асинхронного генератора относительно величины заданной уставки (A S АГ S Aft - Здго) и формирования сигнала соответствующей полярности для запуска схемы максиселектора 5. Мак- сиселектор, содержащий в своем составе запускающее устройство, схему сравнения и устройство запоминания, предназначен для выделения максимального значения отклонения первой производной скольжения АГ ( A S Afmax) и запуска блока 7 аварийного регулирования турбины. Усилитель 6 служит для усиления сигнала, пропорционального A S АГтах и передачи его к блоку 7 аварийного регулирования турбины. Блок 7 аварийного регулирования турбины предназначен для формирования на заданном интервале времени управляющего импульса,величина которого пропорциональна максимальному отклонению скорости изменения скольжения АГ, и передачи его через электрогидравлический преобразователь 8 к гидравлической части системы регулирования 9 первичного двигателя. . При изменении режима работы энергосистемы изменяются значения режимных параметров ЭЭС и асинхронного генератора. При этом изменяется выходной сигнал измерительного датчика 1 скольжения АГ.
Датчик 1, связанный с валом ротора асинхронного генератора, измеряет величину напряжения, пропорциональную скольжению АГ и полученный сигнал в виде постоянного напряжения поступает через согласующий блок 2 к дифференцирующему блоку 3, Блок 3. формируя сигнал, пропор- . циональный скорости изменения скольжения АГ, передает его к блоку 4 сравнения, в котором он сравнивается с величиной опорного напряжения, пропорционального за- данной уставке по первой производной скольжения (S АГО). С выхода блока 4 полученный разностный сигнал А 5дг соот0
5
0
5
0
5
0
5
0
5
ветствующей полярности поступает на вход максиселектора 5.
Максиселектор выполнен таким образом, что его запуск происходит только при положительном знаке отклонения текущего значения S Art от величины уставки S АГО ( AS ). При выполнении этого условия начинается процесс накопления максимальных значений отклонений А S-АГ в устройстве запоминания ПО УСЛОВИЮ A S АГ текущее
-А 5дг предыдущее 0. Выполнение условия
ДЗдГтекущее AS АГ предыдущее Означает,
что при данном возникшем аварийном возмущении в системе выявлено максимальное отклонение,первой производной скольжения АГ A S АГтах. При этом процесс накопления значений A S АГ в запоминающем устройстве прекращается, подается команда на запуск блока 7 (начинается отсчет интервала времени прохождения импульса).и сигнал, пропорциональный З АГтах с выхода запоминающего устройства максиселектора, усиленный в соответствии с установленным в усилителе 6 коэффициентом усиления (К), поступает на блок 7 аварийного регулирования турбины.
В переходных режимах, сопровождающихся снижением скольх ения асинхронного генератора (например, при набросе нагрузки или отключения генерирующей мощности в энергосистеме), а также в режимах сброса электромагнитной мощности АГ, неопасного с точки зрения нарушения устойчивости системы, знак выходного сигнала блока 4 сравнения будет отрицательным и управление.станцией, содержащей асинхронный генератор и ИРМ, осуществляется в соответствии с известным способом управления, выбранным в качестве прототипа.
При аварийных ситуациях в системе, характеризующихся возникновением боль- ших небалансов мощности на валу агрегатов (короткие замыкания в сети, отключения крупных нагрузок), выходной сигнал блока 3 дифференцирования, пропорциональный первой производной скольжения .АГ, превышает опорное напряжение Uon S АГО и на выходе блока 4 сравнения появляется положительный сигнал, осуществляющий запуск схемы максиселектора 5, При срабатывании максиселектора происходит выявление максимального отклонения первой производной скольжения АГ и сигнал, пропорциональный A S АГтах, усиленный в усилителе б, поступает на вход блока.7 аварийного регулирования турбины, где на заданном интервале времени форми-. руется управляющий импульс, который с выхода .блока 7 подается на вход
быстродействующего электрогидравлического преобразователя 8.
Передаточная функция электрогидравлического преобразователя имеет следующий вид:
1
7агп -- Т+р-Тэгп X tWn(p) К AS АГтах,
где 7/эгп - воздействие на гидравлическую часть системы регулирования первичного двигателя (выходной сигнал ЭГП);
ТЭгп - постоянная времени электрогидравлического преобразователя;
К- коэффициент усиления сигнала, пропорционального максимальному отклонению первой производной скольжения АГ;
р - оператор дифференцирования;
Wn(p) - передаточная функция запускающего устройства максиселектора, равная:
О при S АП - S АГО О, 1 при5 АП-5Аго 0;
1 при t to + Ти,
О npnt t + TM,
где 10- момент времени, при котором подается команда на запуск блока 7 аварийного регулирования турбины;
Тп - длительность управляющего импульса.
С выхода электрогидравлического преобразователя сформированный дополнительныйсигнал управления, пропорциональный A S дгтах, подается на вход гидравлической части системы регулирования 9. Ко всем другим входам гидравлической части поступают другие сигналы, осуществляющие регулирование режима работы первичного двигателя асинхронного генератора. При этом количество исходных каналов, их настройка и значения коэффициента усиления остаются без изменения
С выхода гидравлической части системы регулирования 9 преобразованный и усиленный управляющий сигнал воздействует на положение регулирующих клапанов 10 первичного двигателя 11 в соответствии с передаточной функцией:
1
Т,
f/эгп +А(р)
(2)
где /л т положение регулирующих клапанов турбины;
Тс - постоянная времени сервомотора регулирующих клапанов;
А(р) - операторное выражение, включающее в себя сумму управляющих воздейст- 5 вий от различных систем регулирования режима работы первичного двигателя (от механизма управления турбиной, регулятора скорости и др.).
В зависимости от тяжести возмущения
0 в системе изменяются величины небаланса мощностей на валу агрегата и A S АГтах и, следовательно, степень изменения мощности турбины асинхронного генератора для подавления аварийного небаланса.
5 Коэффициент усиления К и длительность управляющего импульса Ти выбирается на основании предварительного расчета электромеханического процесса в энергосистеме из условия, чтобы при тяжелой ава0 рии вблизи станции (например, при трехфазном коротком замыкании на шинах) обеспечивалось полное закрытие регулирующих клапанов первичного двигателя. При этом время дополнительного воздействия
5 на турбину АГ сигналом, пропорциональным AS АГтах. должно находиться вдиэпа- зоне значений 0,25 - 0,4 с, нижний предел которого должен быть не менее эквивалентной постоянной времени гидравлической
0 части системы регулирования, а верхний - ограничен величиной, при которой возможно переторможение агрегата.
Границы района энергосистемы, в котором необходимо локализовать аварийное
5 возмущение путем управления станцией с
АГ, зависят от выбора значения уставки по
первой производной скольжения S АГО
асинхронного генератора. Чем меньше ве; личина S АГО, тем к большему району энер0 госистемы привлекается станция с асинхронным генератором для ликвидации аварийного небаланса мощностей. При этом величина уставки по скорости изменения скольжения АГ должна быть больше
5 значений S АГ, имеющих место при неопас- . ных по условию устойчивости сбросах нагрузки.
Таким образом, способ управления электрической станцией, содержащей асин0 хронный генератор и источник реактивной мощности, обеспечивает локализацию аварийного возмущения, повышая тем самым устойчивость электроэнергетической системы.
5 Формула изобретения
Способ управления электрической станцией, содержащей асинхронный генератор и источник реактивной мощности, состоящий в том, что измеряют режимные параметры энергосистемы и скольжение асинхронного генератора, формируют первую производную скольжения асинхронного генератора, суммируют отклонения режимных параметров энергосистемы, отклонение скольжения от номинального значения и первую производную скольжения, и пропорционально этой сумме регулируют реактивную мощность источника, о т л и ч a tout и и с я тем, что. с целью повышения устойчивости электроэнергетической системы путем локализации аварийного возмущения, контролируют отклонение первой производной скольжения асинхронного ге
5
нератора от величины уставки, и при положительном знаке отклонения выявляют его максимальное значение, формируют запускающий сигнал в интервале времени, нижний предел длительности которого должен быть не менее эквивалентной постоянной времени гидравлической части системы регулирования, а верхний ограничен величиной, при которой возможно переторможение, в этом интервале изменяют мощность турбины асинхронного генератора пропорционально упомянутому максимальному отклонению первой производной скольжения асинхронного генератора.
| Портной М | |||
| Г | |||
| и др | |||
| Управление энергосистемами для обеспечения устойчивости, М.: Энергия, 1978 | |||
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1989 |
|
SU1617531A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
