Изобретение относится к электротехнике и может быть использовано на электрических стан1Ц1ях, оснащенных асинхронными генераторами (АГ) и источниками реактивной мощности (ИРМ), например статическими тмристорными компенсаторами (СТК), для управления переходными режимами.
Целью изобретения является повышение надежности электроэнергетической системы (ЭЭС) путем увеличения пределов динамической устойчивости и улучшения качества переходного процесса.
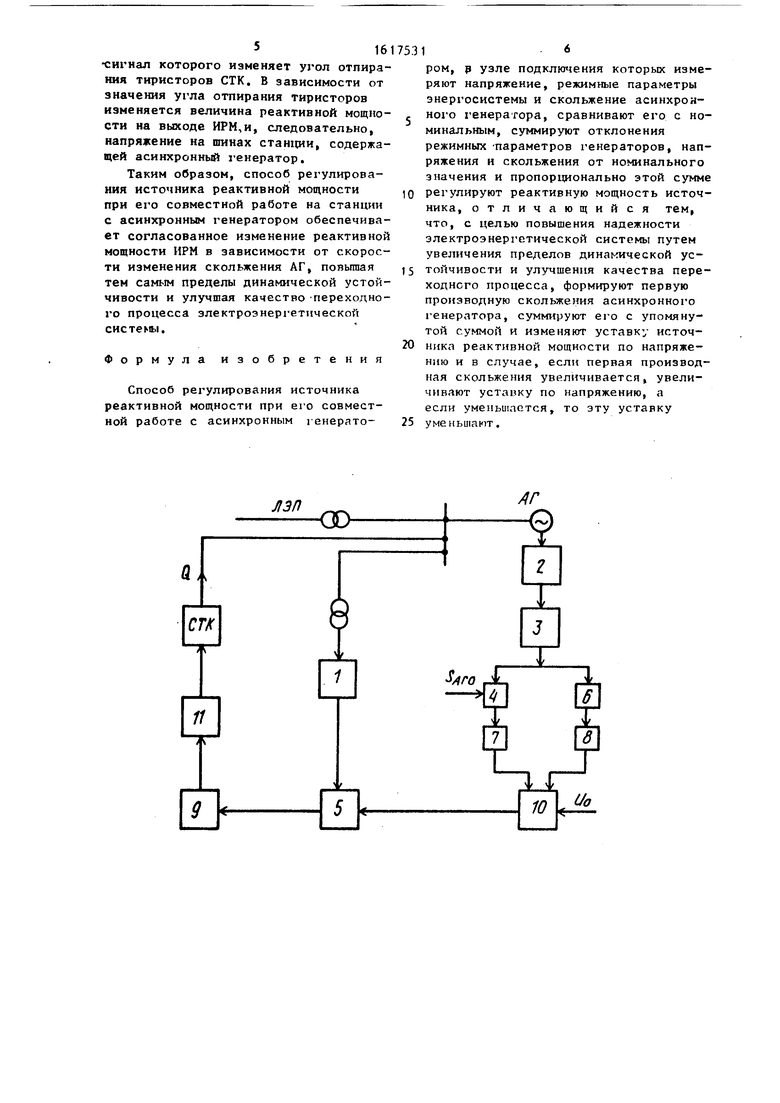
На чертеже представлена блок-схема устройства, поясняющая данный способ.
Устройство содержит датчик 1 измерения напряжения, датчик 2 измерения скорости асинхронного генератора, согласуюиц й блок 3, блоки 4 и 5 сравнения, дифференцирующий блок 6, усилители 7-9, сумматор 10, блок 11 фор- ьшрования управлякщих импульсов. В узле подключения ИРМ измерительный датчик 1 подсоединен к шинам станции посредством измерительного трансформатора напряжения. Измерительный датО5
СП
ОЭ
чик 2 связан непосредственно с валом ротора асинхронного генератора. Выход датчика 2 скорости асинхронного генератора подсоединен к входу согла- сующего блока 3, вькод которого связан с входами блока 4. сравнения и дифференцирующего блока 6. Выходы блока 4 , сравнения и дифференцирункце- го блока 6 подключены к усилителям 7 и 8, выходы которых связаны с соответствующими входами сумматора Ю, выход которого подключен к одному из входов блока 5 сравнения, другой вход которого присоединен к выходу изме- рителвного датчика 1 напряжения, а выход - к входу усилителя 9, выход которого связан с входом блока 11 формирования управляющих импульсов, выход которого подсоединен к управля- ющему входу тиристоров СТК.
В данной блок-схеме в качестве датчика 2 скорости можно использовать Тахогенераторы, а в качестве согласующего блока 3 - усилители посТояннох о напряжения. Датчик скорости служит для определения скорости вращения ротора АГ в виде п остоянного напряжения, пропорционального скорости вращения, а согласующий блок служит для согласования величины напряжения на выходе датчика скорости с входами блока 4 сравнения и дифференцирующего блока 6. Блок 4 сравнения выполняет функцию измерения отклонения текущего скольжения АГ относительно величины заданной уставки, равной номинальному значению скольжения US. S.(.i -S,. , где 5др1 - текущее значение скольжения асинхронного генератора; Здсд- номинальное значение скольжения асинхронного генератора, а дифференцирующий блок 6 предназначен для формирования сигнала, пропорционального скорости изменения скольжения АГ. Усилители 7-9 служат для усиления сигналов соответственно по отклонению скольжения АГ, его первой производной и по отклонению напряжения. Сумматор 10 предназначен для суммирования сигналов rio выбранным параметрам режима системы, по отклонению скольжения АГ и скорости изменения скольжения асинхронного генератора (в соответствии с предлагаемым способом)
с уставкой ИРМ по напряжению Но.
При изменении режима работы ЭЭС изменяются значения напряжения на I lH
с ,о т5 20
5 о ,, 0 5
0
5
нах станции и скольжения асинхронного генератора. При этом изменяются выходные сигналы с измерительных Aat- чиков 1 и 2.
Датчик 2 скорости, установленный на валу ротора АГ, измеряет величину напряжения, пропорциональную скорости вращения ротора асинхронного генератора, и полученный сигнал в виде постоянного напряжения поступает через согласующий блок 3 к блоку 4 сравнения и дифференцирукщему блоку 6, Блоки 4 и 6, формируя сигналы, пропорциональные соответственно отклонению и скорости изменения скольжения АГ, передают их усилителям 7 и 8. Усиленные сигналы в соответствии с установленными в усилителях 7 и 8 коэффициентами усиления К и К поступают на вход сумматора 10, где складываются с уставкой регулятора СТК по напряжению U, соответствующей номинальному напряжению на шинах станции.
Ко всем остальным входам сумматора 10 поступают другие сигналы по выбранным параметрам режима ЭЭС, При зтом количество исходных каналов, их настройка и значения коэффициентов усиления остаются без изменения.
С выхода сумматора 10 полученный сигнал, пропорциональньй величине скорректированной уставки
(p),+K,5.S;r, где А(Р) - операторное вЕлражение, включающее в себя сумму управляющих воздействий, зависящих от отклонения режимных параметров ЭЭС{ US|y - отклонение текущего значения скольжения АГ () относительно его номиналь- I него значения (); Sдр - первая производная скольжения АГ; К , - коэффициент усиления по
этим каналам,
поступает на один из входов блока 5 сравнения, на другой вход которого подается значение текущего напряжения на шинах cTampiH с выхода измерительного датчика 1. Разностный сигнал на выходе блока 5 сравнения усиливается в усилителе 9 в соответствии с установленным ко ффициентом усиления регулятора по отклонению напряжения (Кр„ ) и поступает на блок 11 формирования управля-кчцих импульсов, выходной
516
сигнал которого изменяет угол отпирания тиристоров СТК. В зависимости от значения угла отпирания тиристоров изменяется величина реактивной мощности на выходе ИРМ,и, следовательно, напряжение на шинах статщи, содержащей асинхронный генератор.
Таким образом, способ регулирования источника реактивной мощности при его совместной работе на станции с асинхронным генератором обеспечивает согласованное изменение реактивной мощности ИРМ в зависимости от скорости изменения скольжения АГ, повьппая тем самым пределы динамической устойчивости и улучшая качество переходного процесса злектроэнер1 етической системы.
Формула изобретения
Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генерато
0
s
0
5
1
ром, э узле подключения которых измеряют напряжение, режимные параметры энергосистемы и скольжение асинхронного генератора, сравнивают его с номинальным, суммируют отклонения режимных -параметров генераторов, напряжения и скольжения от номинального значения и пропорционально этой сумме регулируют реактивную мощность источника, отличающийся тем, что, с целью повышения надежности электроэнергетической системы путем увеличения пределов динамической устойчивости и улучшения качества переходного процесса, формируют первую производную скольжения асинхронного генератора, суммируют его с упомянутой суммой и изменяют уставку источника реактивной мощности по напряжению и в случае, если первая производная скольжения увеличивается, увеличивают уставку по напряжению, а если уменьшается, то эту уставку уменьшают.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1990 |
|
SU1741223A2 |
| Способ управления электрической станцией, содержащей асинхронный генератор и источник реактивной мощности | 1991 |
|
SU1815735A1 |
| Способ регулирования источника реактивной мощности | 1983 |
|
SU1149348A1 |
| Способ регулирования возбуждения синхронного генератора | 1990 |
|
SU1772870A2 |
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| Способ управления возбуждением синхронного генератора | 1986 |
|
SU1415327A1 |
| Способ регулирования напряжения синхронных и асинхронных генераторов | 1988 |
|
SU1508312A1 |
| Устройство для защиты автономной электроэнергетической системы от понижения напряжения | 1981 |
|
SU1081726A1 |
| СПОСОБ МОНИТОРИНГА ПЕРЕХОДНЫХ РЕЖИМОВ В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2513874C1 |
| Комплекс для испытания алгоритмов управления электроэнергетической системой | 2017 |
|
RU2686641C1 |
Изобретение относится к электротехнике и может быть использовано на электрических станциях, оснащенных асинхронными генераторами и источниками реактивной мощности, например статическими тиристорными компенсаторами для управления переходными процессами. Цель изобретения - повышение надежности электроэнергетической системы путем увеличения пределов динамической устойчивости и улучшения качества переходного процесса. Это достигается тем, что управляющее воздействие на источник реактивной мощности формируют не только по параметрам режима электрической системы и по отклонению скольжения асинхронного генератора, но и по скорости изменения скольжения асинхронного генератора. Увеличение скорости изменения скольжения асинхронного генератора приводит к увеличению, а уменьшение соответственно к уменьшению генерируемой источником реактивной мощности. 1 ил.
лэп
Чг-Г
| Статические компенсаторы для регулирования реактивной мощности | |||
| Под ред | |||
| Р.М.Матура | |||
| М.: Энергоатом- издат, 1987, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Способ управления возбуждением синхронного генератора | 1986 |
|
SU1415327A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
