Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения перемещений объектов. ;
Цель изобретения - повышение точности измерения перемещений.
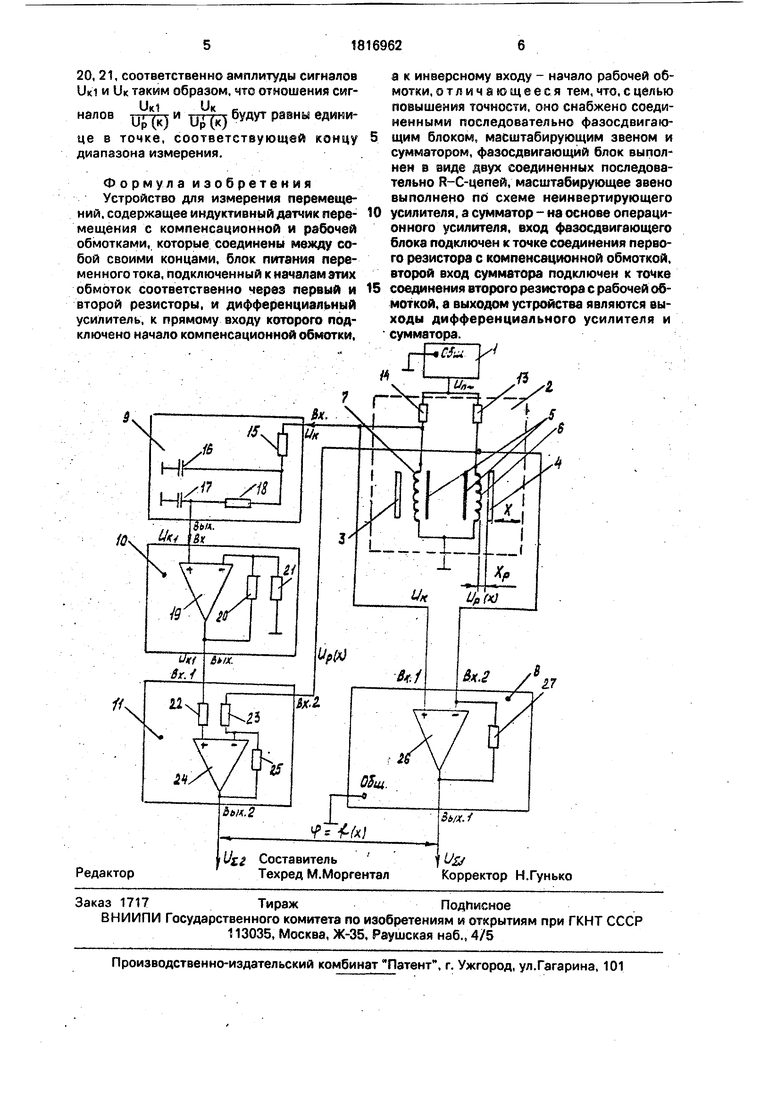
На чертеже изображена блок-схема устройства для измерения перемещений.
Это устройство содержит блок 1 питания переменного тока, индуктивный датчик 2 перемещений (чувствительный элемент), выполненный в виде размещенных на разомкнутом магнитопроводе рабочей обмотки 6 и компенсационной обмотки 7, последовательно с которыми включены регулируемые по величине резисторы 14,13 и сумматор 8.
К точке соединения резистора 14с компенсационной обмоткой 7 подключен первый вход дифференциального усилителя (сумматора). Второй вход сумматора 8 подключен к точке соединения резистора 13с рабочей обмоткой 6. Свободные выводы резисторов 14 и 13 соединены с выходом блока питания 1. К общей точке соединения рабочей 6 и компенсационной 7 обмоток присоединена шина нулевого потенциала. Она присоединена также к общим выводам блока питания 1 дифференциального сумматора (элементы 26 и 27). Фазосдвигающий блок 9 выполнен в виде двух последовательно соединенных, фазосдвигающих цепей типа RC (элементы 15 - 18), к выходу которого присоединено масштабирующее звено 10, выполненное
00
с чэ о
ю
31816962 4
по схеме неинвертирующего усилителя (эле-версия напряжения Up(X) по фазе на 180°, и
менты 19-21).сдвиг фаз ра между напряжением UK и инК выходу масштабирующего звена 10вертированным рабочим напряжением Up
присоединен первый вход сумматора 11,(X) определяется выражением
выполненного на операционном усилителе 5180°- ,
(элементы 22 - 25), второй вход сумматораНапряжения UK и Up(X), сдвинутые по
11 присоединен к точке соединения рези-фазе на угол узь, геометрически суммируютстора 13с рабочей обмоткой 6, Вход фазос-ся на дифференциальном усилителе-суммадвигающего блока 9 подключен к точкеторе 8, с выхода которого снимается
соединения резистора 14 с компенсацией- Юсуммарное напряжение Ц#с изменяющейся
ной обмоткой 7. Выходным сигналом уст-фазой фшх. а функции перемещения X.
ройства является разность фазТаким образом, при изменении напряуэвых $РиЈ1 . изменяющаяся в функ-жения Up(X) в функции перемещения меняции перемещения X между выходными сиг-втся величина и направление вектора
налами дифференциального усилителя 15суммарного напряжения Ц-j, т.е. меняется
сумматора 8 1) и выходным сигналомугол фЪых.1.
ЦЈ4 сумматора 11. Индуктивный датчик 2 пер -Одновременно с помощью фазосдвига- емещений содержит размещенные в ферро-ющего блока 9 синусоидальное напряжение магнитном корпусе 12 разомкнутый ферро-U в точке соединения резистора Мсобмот- магнитный сердечник 5, на котором 20КОй 7 сдвигают по фазе на угол расположены рабочая 6 и компенсационнаясторону опережения относительно вектора 7 обмотки.напряжения Up(X) путем изменения величи- 8 компенсационной половине датчиканы сопротивления резисторов 15, 18 блока расположен на неизменном расстоянии9. На выходе блока 9 формируется при этом компенсационный якорь 3. а рабочий якорь «синусоидальный сигнал UKI, который через 4 установлен с возможностью перемещениямасштабирующее звено 10 (элементы 19 - х21) поступает на первый вход (Вх.1) сумма- Устройство работает следующим обра- j 1 (элементы 22 - 25). а на второй вход зом- „.(Вх.2)сумматора 11 поступает синусоидаль- Синусоидальное напряжение питания с ный ситная Up(X) с точки соединения рези- выхода блока напряжения переменного то-стера 13 с обмоткой 6. На сумматоре 11 кэ, имеющего малое внутреннее сопротие-происходит геометрическое сложение сину- ление, через резисторы 14,13 поступает насоциальных сигналов U и Up (X). В резуль- рабочую 6 и компенсационную 7 обмоткутвте т 8ых.2 сумматора 11 формируется датчика 2. При перемещении рабочего яко- 35второе суммарное напряжение Ц , вектор ря 4. например, в сторону увеличения эазо-которого поворачивается в противополож- ра Хр уменьшается индуктивность, а такженом направлении относительно поворота индуктивное и полное сопротивление рабо-вектора напряжения Ц«. В результате одно- чей обмотки 6 датчика. Так как блок питанийвременного поворота двух векторов сум- 1 имеет м§лое внутреннее сопротивление, « мариых сигналов UЈ1 и Ug2 в разных то при уменьшении полного сопротивлениянаправлениях разность фаз обмотки 6 уменьшается амплитуда напря- s ,ых1 ц. Ых2 между ними изменяет- жения UP(X), снимаемого с точки соедине- Ся с удвоенной скоростью. Поскольку диапа- ния резистора 13 с обмоткой 6, по закону.зои изменения разности фаз между этими близкому к экспоненциальному. «5сигналами в 2 раза больше, устройство об- Между компенсационным напряжени-ладает повь,шенной в два раза чувствитель- ем UK. снимаемым с точки соединения рези-ностью преобразования по сравнению с стора 14 и компенсационной обмотки 7, иустройством-прототипом, а следовательно и рабочим напряжением Up(X), путем измене- „повышенной точностью измерения переменил величины сопротивления резистора 13, аищении
устанавливают угол сдвига фаз более 0°,Повышение линейности выходной хано менее 10 (в сторону опережения векторарактеристики устройства обеспечивается
нэпряженияур(Х) относительно вектора на-путем выбора необходимых углов сдвига
пряжения ик). Напряжения UP(X) и UK. из-фаз «), между сигналами UK и Up (X),
меняющиеся в функции перемещения X, 55UK, и помощью резисторов 13, 14и
поступают соответственно на прямой и ин-фазосдвигающего блока 9. соответственно
версный входы сумматора 8.(путем изменения величины сопротивления
На инверсном входе дифференциально-элементов 15,18) и изменением с помощью
го усилителя-сумматора 8 производится ин-масштабирующего звена 10 и резисторов
20, 21, соответственно амплитуды сигналов UK и UK таким образом, что отношения сигUKiUK „ налов ..I /л и ттт-гл бУДУТ равны единиUp (К) Up (К)
це в точке, соответствующей концу диапазона измерения.
Формула изобретения Устройство для измерения перемещений, содержащее индуктивный датчик перемещения с компенсационной и рабочей обмотками, которые соединены между собой своими концами, блок питания переменного тока, подключенный к началам этих обмоток соответственно через первый и второй резисторы, и дифференциальный усилитель, к прямому входу которого подключено начало компенсационной обмотки,
а к инверсному входу - начало рабочей обмотки, отличающееся тем, что, с целью повышения точности, оно снабжено соединенными последовательно фазосдвигающим блоком, масштабирующим звеном и сумматором, фазосдвигающий блок выполнен в виде двух соединенных последовательно R-C-цепей, масштабирующее звено выполнено по схеме неинвертирующего
усилителя, а сумматор - на основе операци- онного усилителя, вход фазосдвигающего блока подключен к точке соединения первого резистора с компенсационной обмоткой, второй вход сумматора подключен к точке
соединения второго резистора с рабочей обмоткой, а выходом устройства являются выходы дифференциального усилителя и сумматора.
жги
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1725068A1 |
| Антенный преобразователь перемещения в фазу | 1990 |
|
SU1817243A1 |
| Индуктивный датчик перемещения с фазовым выходом | 1990 |
|
SU1716309A1 |
| Устройство для бесконтактного измерения перемещений | 1991 |
|
SU1827526A1 |
| Преобразователь перемещение-фаза | 1991 |
|
SU1827525A1 |
| Оптический датчик перемещения с фазовым выходом | 1988 |
|
SU1647250A1 |
| Осциллографический феррометр | 1972 |
|
SU512637A1 |
| Устройство для бесконтактного измерения перемещений | 1986 |
|
SU1388700A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности устройства для измерения перемещений за счет повышения его чувствительности. Устройство содержит индуктивный датчик перемещения с рабочей и компенсационной, обмотками, размещенными на разомкнутом магнитопроводе и соединенными своими концами. К началам этих обмоток присоединен через регулируемые резисторы блок питания переменного тока, а также входы дифференциального усилителя. К точке соединения первого резистора и компенсационной обмотки присоединен фаэосдвйгающий блок, к выходу которого присоединены масштабирующее звено и сумматор. К второму входу сумматора присоединена точка соединения второго резистора и рабочей обмотки. Выходной сигнал представляет собой разность фаз сигналов, получаемых на выходах дифференциального усилителя и сумматора. 1 ил.
Редактор
JZ2 Составитель
Техред М.Моргентал
Заказ 1717Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
и&
Корректор Н.Гунько
| Устройство для измерения перемещений | 1989 |
|
SU1647228A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
