Изобретение относится к вычислительной технике и предназначено для применения при исследовании методами аналогового моделирования динамики двух(одно)массовых колебательных дисси- пативных механических систем с внешним (в окружающей среде) вязким и внутренними (в материале) гистерезисным и релакса- ционным вязким трениями упругого элемента этих систем. Особенно, при исследовании влияния диссипации энергии колебаний, вызываемой указанными видами трения, на процесс затухания свободных колебаний моделируемой системы. Оно может быть применено п ри исследовании электромеханических и электрических колебательных систем.
Цель изобретения - повышение точности моделирования за счет учета рассеяния энергии колебаний на внешнее и внутреннее релаксационные вязкие трения моделируемой колебательной механической системы.
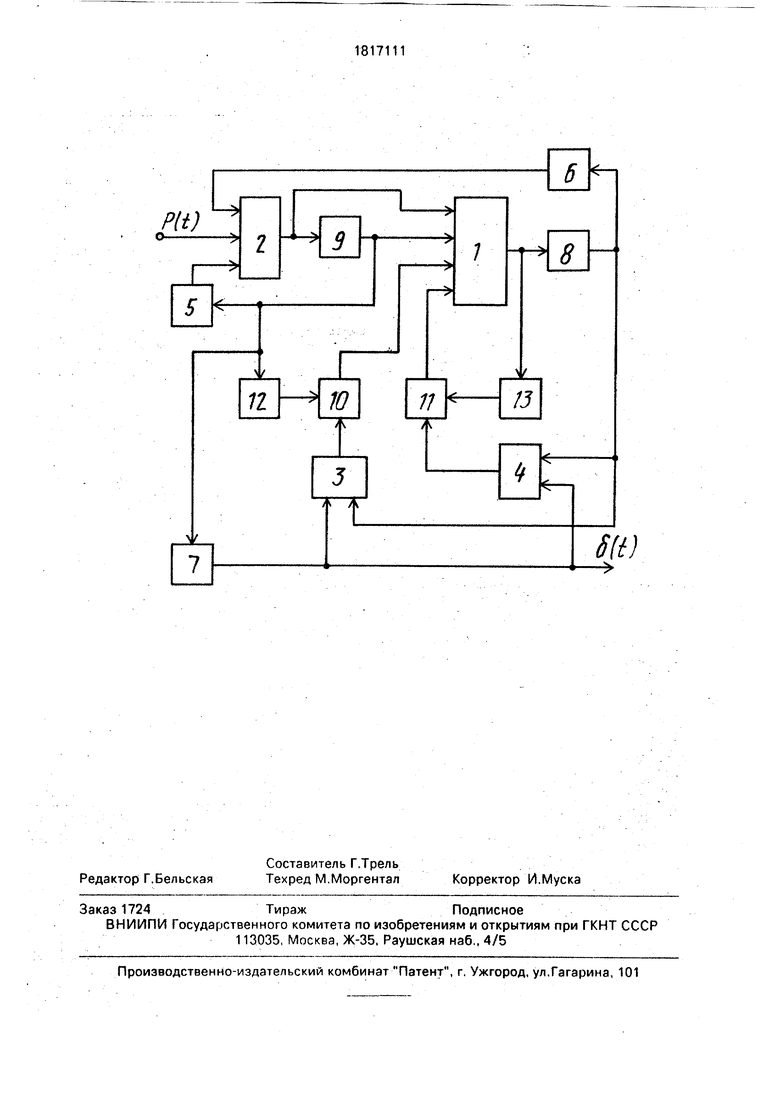
На чертеже представлена схема предлагаемого устройства.
Устройство содержит первый 1, второй 2, третий 3 и четвертый 4 сумматоры, первый 5 и второй 6 инверторы, первый 7, второй 8 и третий 9 интеграторы, первый 10 и второй 11 блоки умножения, первый 12 и второй 13 блоки модуля. Оно имеет вход по сигналу задания внешнего усилия P(t) и выход по сигналу деформации 6 (t) упругого элемента системы.
со
Работу устройства рассматривают на примере моделирования одномассовой механической колебательной системы.
В процессе моделирования сигнал со входа устройства, соответствующий действующему внешнему усилию P(t), поступает на первый вход второгб сумматора 2, на второй вход которого через второй инвертор 6 поступает сигнал с выхода второго интегратора 8, соответствующий упруго- фрикционному внутреннему усилию T(t), действующему со стороны упругого элемента на подвижный элемент системы, а на третий вход этого второго сумматора 2 через первый инвертор 5 поступает сигнал с выхода третьего интегратора 9, соответствующий силе внешнего вязкого трения системы. Если коэффициенты передачи по трем входам сумматора 2 обратно пропорциональны массе подвижного элемента системы, то на выходе этого сумматора получают
сигнал, соответствующий ускорению 5(t) деформации упругого элемента, который поступает на четвертый вход первого сумматора 1 и на вход третьего интегратора 9. В результате интегрирования входного сигнала (с учетом вводимых начальных условий) на выходе третьего интегратора 9 получают сигнал, соответствующий скорости
5 (t) деформации, который поступает на первый вход первого сумматора 1 и на входы первого инвертора 5, первого блока модуля 12 и первого интегратора 7. В результате (с учетом вводимых начальных условий) на выходах первого интегратора 7 и устройства получают сигнал, соответствующий деформации д (t) упругого элемента или перемещению подвижного элемента моделируемой системы,
из входов соответственно первого 10 и второго 11 блоков умножения, на другие входы которых подают сигнал с выхода первого блока выделения модуля 12, соответствую,
щи и I o(t) I, а с выхода второго блока выделения модуля 13 сигнал, соответствующий IT(t)l . С выходов блоков умножения 10 и 11 сигналы поступают на второй и третий входы первого сумматора 1, на выходе которого получают сигнал, соответствующий t(t).
Таким образом, предлагаемое устройство воспроизводит процессы движения колебательной механической диссипативной
системы, описываемые следующей системой интегро-дифференциальных уравнений:- для двухмассовой системы
1
1
1
Ht)P(t)-((t) + F(t);
- для одномассовой системы
-(0 (0-РЮ1- для любой из этих систем
30 .t . . t
б (t) f6 (t) dt + Сб.; д (t) / 6 (t)dt -f Q5;
оо
T(t) }f(t)dt CT;F(t) KBT3(t); Joо t(t) КИУ 5(t) + KPT 3(t) + Км 5(t) - 40-Kr2T(t) д (t) - Kr3T(t) КГ4 3(t) |f (4

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования пары трения | 1988 |
|
SU1817110A1 |
| Устройство для моделирования петли гистерезиса | 1989 |
|
SU1732358A1 |
| Устройство для моделирования петли гистерезиса | 1990 |
|
SU1709354A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Устройство для моделирования реологических характеристик материала | 1988 |
|
SU1755301A1 |
| Устройство для моделирования петли гистерезиса | 1988 |
|
SU1550542A1 |
| Устройство для моделирования диаграммы циклического деформирования | 1989 |
|
SU1803922A1 |
| Устройство для моделирования гистерезисных характеристик магнетиков и диэлектриков | 1990 |
|
SU1783548A1 |
| Устройство для моделирования гистерезисных характеристик магнетиков и диэлектриков | 1991 |
|
SU1830539A1 |
| Устройство для моделирования конструкционного трения | 1979 |
|
SU860091A1 |
Изобретение относится к аналоговой вычислительной технике и предназначено для применения при исследовании динамики механических систем с учетом рассеяния энергии колебаний на релаксационное и ги- стерезисное внутреннее и внешнее вязкое трения упругого элемента системы. Цель изобретения - повышение точности моделирования. Для достижения поставленной цели в устройство, содержащее первый сумматор, первый и второй интеграторы, первый и второй блоки умножения, первый и второй блоки выделения модуля, введены второй, третий и четвертый сумматоры, первый и второй инверторы и третий интегратор. Устройство по сигналу, соответствующему внешнему усилию, на своем выходе вырабатывает сигнал, соответствующий деформации упругого элемента системы с учетом рассеяния энергии колебаний на гистерезисное и релаксационное внутренние трения. 1 ил. fe
В результате алгебраического суммирования поступающих на входы первого сумматора 1 сигналов на его выходе получают сигнал, соответствующий скорости t(t) из- менения упругофрикционного внутреннего усилия T{t) упругого элемента, который подают на входы второго блока выделения модуля 13 и второго интегратора 8. Интегрирование (с учетом вводимых началь- ных условий) на выходе второго интегратора 8 дает сигнал, соответствующий усилиюT(t), действующему на подвижный элемент системы со стороны ее упругого элемента. Этот сигнал поступает на первые входы третьего 3 и четвертого 4 сумматоров, на вторые входы которых подают сигналы с выхода первого интегратора 7. С каждого из выходов сумматоров 3 м 4 сигнал поступает на один
где т./, mi - массы подвижных элементов системы;
P(t) - внешнее усилие, действующее на систему;
F(t) - сила внешнего вязкого сопротивления;
T(t), T(t) - сила упругофрикционного сопротивления упругого элемента и ее скорость изменения;
д (t), 5 (t), 6 (t)- деформация упругого элемента, ее скорость и ускорение;
Сб, О5гСт - начальные условия интегрирования;
КИУ - коэффициент жесткости идеально- упругой части упругого элемента;
Квт - коэффициент внешнего вязкого трения системы;
КРТ коэффициент внутреннего релаксационного вязкого трения в материале упругого элемента;
Кп, Кг2, Кгз, Кг4 - коэффициенты составляющих внутреннего гистерезисного трения в материале упругого элемента.
С энергетической точки зрения физический смысл последних шести коэффициентов заключается в том, что они своей совокупностью отражают наличие диссипа- тивных свойств моделируемой системы, которые зависят от наличия в ней различных видов трения. Первые два из них отражают влияние вязких трений, зависящих как от направления, так и от величины скорости деформации упругого элемента, а последние четыре - составляющих внутреннего гистерезисного трения, зависящего от направления, но независящего от величины, скорости деформации упругого элемента.
Коэффициенты передачи Kij, используемых в устройстве операционных блоков I по их соответствующим рходам J, можно рассчитать с помощью следующих соотношений:, для двухмассовой системы
К22 М +
К2з МтМвтКвт( + ):
- для одномассовой системы
К22 Mm -- : «23 МтМвтКвТ-- ,
- для любой из этих систем
К21 Mm -; Кп МиуКиу; Кп Мрт КРТ;
Ki2K3i- МпКп: К12Кз2 - Мг2Кг2;
К13ЮП МгзКгз; К13К42 МГ4КГ4.
где М - обозначение соответствующего масштабного коэффициента.
Формула изобретения
Устройство для моделирования механической колебательной системы, содержащее первый сумматор, первый и второй интеграторы, первый и второй блоки умножения, первый и второй блоки выделения
модуля, причем выход первого блока выделения модуля подключен к первому входу первого блока умножения, выход которого соединен с первым входом первого сумма- тора, второй вход которого подключен к выходу второго блока умножения, первый вход которого соединен с выходом второго блока выделения модуля, выход первого интегратора является выходом деформации упругого элемента устройства, отличающееся
тем, что, с целью повышения точности моделирования, в него введены второй, третий и четвертый сумматоры, первый и второй инверторы и третий интегратор, выход которого соединен с третьим входом первого
сумматора, с входом первого блока выделения модуля, с входом первого интегратора и входом первого инвертора, выход которого подключен к первому входу второго сумма- тора, выход которого соединен с входом
третьего интегратора и четвертым входом первого сумматора, выход которого подключен к входу второго блока выделения модуля и входу второго интегратора, выход которого соединен с первыми входами третьего и
четвертого сумматоров и входом второго инвертора, выход которого подключен к второму входу второго сумматора, выход первого интегратора соединен с вторыми входами третьего и четвертого сумматоров, выходы
третьего и четвертого сумматоров подключены к вторым входам соответственно первого и второго блоков умножения, третий вход второго сумматора является входом задания внешнего усилия устройства.
| Устройство для моделирования упругого гистерезиса | 1986 |
|
SU1399780A1 |
| Устройство для моделирования диаграммы циклического деформирования | 1987 |
|
SU1543428A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
