Изобретение относится к аналоговой вычислительной технике и предназначено для применения при исследовании динамики механических систем, содержащих пары трения, с учетом зависимостей их сил сопро тивления от действующих в контакте пары усилий, массы подвижного элемента пары и диссипации энергии на гистерезисное и релаксационное вязкое внутренние трения в контакте в процессе предварительного сме- щения подвижного элемента.
Цель изобретения - повышение точности моделирования за счет учета зависимости силы упругофрикционного сопротивления в контакте пары от изменений действующих одновременно тангенциального и нормального усилий.
На чертеже представлена схема предлагаемого устройства.
Устройство содержит первый 1, второй 2 и третий 3 сумматоры, инвертор 4, первый 5, второй б, третий 7 и четвертый 8 интеграторы, первый 9, второй 10, третий 11 и четвертый 12 блоки умножения, первый 13, второй 14 и третий 15 блоки деления, блок извлечения квадратного корня 16, блок выделения модуля 17, первый 18 и второй 19 компараторы, первый 20, второй 21, третий 22 и четвертый 23 источники постоянных напряжений. У первого 20 и третьего 22, второго 21 и четвертого 23 источников напряжения разнополярны, а по абсолютным величинам соответствуют максимальному нормальному усилию Mm и квадратному кор- ню максимального нормального усилия VNm . Оно имеет входы задания действующего тангенциального усилия P(t), скорости изменения действующего нормального усилия N(t) и начального значения нормального усилия NH, выходы формирования предварительного смещения подвижного элемента dn(t), скорости перемещения подвижного
элемента 6 {t) и действующего нормального усилия N(t).
В процессе моделирования сигнал с входа задания P(t) устройства поступает на первый вход первого сумматора 1, на второй вход которого подают сигнал с выхода второго блока умножения 10, соответствующий тангенциальному усилию упругофрикционного сопротивления в контакте пары T(t). Если коэффициенты передачи по первому и второму входам первого сумматора 1 обратно пропорциональны массе подвижного элемента пары, то на его выходе получают сигнал, соответствующий ускорению
перемещения подвижного элемента $(t), который подают на вход делимого второго блока деления 14 и на информационный вход третьего интегратора 7. С выхода этого интегратора, являющегося выходом формирования сигнала 5 (t) устройства, сигнал поступает на первый вход второго сумматора 2, на второй вход которого поступает сигнал с выхода третьего блока деления 15. Сигнал алгебраической суммы с выхода этого сумматора подают на вход делимого первого блока деления 13, с выхода которого сигнал результата деления поступает на информационный вход первого интегратора 5, первый информационный вход второго интегратора 6 и через блок выделения модуля 17 на первый вход третьего блока умножения 11. На третий информационный вход второго интегратора 6 подают сигнал с выхода второго блока деления 14, на второй информационный вход этого интегратора поступает сигнал с выхода третьего блока умножения 11, а с выхода интегратора сигнал, соответствующий T(t)/N(t), подают на первый вход второго блока умножения 10 и через инвертор 4 на первый вход третьего сумматора 3. С выхода первого интегратора 5 сигнал, соответствующий дп (t)A/N (t) , поступает на первый вход первого блока умножения 9, второй вход четвертого блока умножения 12 и второй вход третьего сумматора 3, с выхода которого сигнал подают на второй вход третьего блока умножения 11.
Сигнал с входа задания N(t) устройстве поступает на информационный вход четвертого интегратора 8 и первый вход четвертого блока умножения 12. с выхода которого сигнал подают на вход делимого третьего блока деления 15. Сигнал с входа задания NH устройства поступает на вход задания начального условия интегрирования четвертого интегратора 8, с выхода которого, являющегося выходом формирования ,N(t) устройства, сигнал подают на второй вход второго блока умножения 10 и вход блока извлечения квадратного корня 16. С выхода последнего сигнал, соответствующий VN(t) , поступает на входы делителей первого 13, второго 14 и третьего 15 блоков деления и второй вход первого блока умножения 9, выход которого является выходом формирования (5n(t) устройства. С выхода первого интегратора 5 сигнал подают на вторые входы сравнения первого 18 и второго 19 компараторов. На первый сигнальный вход первого компаратора 18 подают сигнал, соответствующий Nm, с выхода первого источника постоянного напряжения 20. С выхода второго источника постоянного
напряжения 21 сигнал, соответствующий VNm , поступает на первые сигналиный вход и вход сравнения второго компаратора 19, на второй вход сравнения которого подают сигнал, соответствующий Nm, с выхода третьего источника постоянного напряжения 22. С выхода четвертого источника постоянного напряжения 23, сигнал, соответствующий VNm , поступает на первый вход сравнения и на второй сигнальный вход первого компаратора 18. Сигналы с первого и второго выходов второго компаратора 19 подают на первые входы задания ограничения соответственно первого 5 и второго 6 интеграторов, на вторые входы задания ограничения которых поступают сигналы соответственно с первого и второго выходов первого компаратора 18. Это обеспечивает ограничение выходных напряжений первого 5 и второго 6 интеграторов соответственно величинами пропорциональными VNm и Nm.
В результате устройство на своих выходах формирует сигналы, соответствующие параметрам состояния моделируемой пары трения, описываемого системой следующих интегродифференциальных уравнений:
3(t)(t)-T(t):
m
t.
5(t) /3(t)dt+.C7;
i.
N(t) / N (t)dt + Ce:
.V(t
+ anPHl l,40 Tcm „ ... „„... . ,.
feV« « -4fri
Jt
.+йпр1 Ш| №
.
(t
ЩР + KPTVr tJ + + KnvRn isrjt)
VKT(fJ )
5 (t) Nft
Sgn б (t)
1 прид(т.) ); Onpi/i 5(t)0; -1 npii(5(t) 0;
бпт - Z f
i cm
fNn
5 0 5 0
5
0
5
0
5
0
5
где m-масса подвижного элемента моделируемой пары трения;
P(t) - действующее на подвижный элемент тангенциальное усилие;
Т(т) - тангенциальное усилие упругоф- рикционного сопротивления в контакте пары;
N(t) - действующее в контакте пары нормальное усилие;
NH - начальное значение нормального усилия;
Nm - максимальное значение нормального усилия;
Tcm - максимальное значение упругоф- рикционного сопротивления скольжения подвижного элемента при максимальном нормальном усилии;
N(t)- скорость изменения нормального усилия;
б (t) ; 6 (t)- скорость и ускорение перемещения подвижного элемента;
дп (t) , дпт - перемещение подвижного элемента в зоне предварительного смещения и максимальное значение этого смещения при максимальном нормальном усилии;
гт (т)т (Vh
fysmiy lVN(ffl СК°Р°СТИ изменения
соответствующих отношений;
f - коэффициент трения элементов пары;
г - коэффициент пропорциональности максимального значения предварительного смещения;
Cs, Се, С, Се-начальные условия интегрирования соответствующих интеграторов, причем Се пропорционально величине NH,
Кж - коэффициент жесткости контакта пары, определяемый по начальной кривой нагружения подвижного элемента тангенциальной силой при постоянном нормальном усилии в контакте пары;
Крт - коэффициент релаксационного вязкого (частотнозависимого) трения в контакте пары;
Кп, Кг2 коэффициенты составляющих силы гистерезисного (частотнонезависимо- го) трения в контакте пары в зоне предварительного смещения ее подвижного элемента.
С энергетической точки зрения физический смысл последних трех коэффициентов
заключается в том, что они своей совокупностью отражают наличие диссипативных свойств у моделируемой пары трения, которые зависят, в частности, от указанных видов трения в контакте пары.5
Коэффициенты передачи KIJ, используемых в устройстве операционных блоков I по их соответствующим входам J, можно рассчитать с помощью следующих соотношений:10
Кп Ki2 Mm ; K21 К22 1,0;
Kei МжКж; Кб2 МртКрт;
К63К32 MrlKri; К63К31 Мг2К12,
где М - обозначен ие соответствующего масштабного коэффициента.
Формулаизобретения Устройство для моделирования пары трения, содержащее первый сумматор, инвертор, первый и второй интеграторы, пер- вый-четвертый блоки умножения, первый блок деления, первый и второй компарато- ры, первый и второй источники постоянных напряжений, пропорциональных соответственно максимальному нормальному усилию и квадратному корню максимального нормального усилия, причем выход первого блока умножения является выходом формирования предварительного смещения подвижного элемента устройства, выход первого источника постоянного напряжения подключен к первому сигнальному вхо- ду первого компаратора, выход второго источника постоянного напряжения соединен с первым сигнальным входом и первым входом сравнения второго компаратора, первый и второй выходы которого под к л ю- чены к первым входам задания ограничения соответственно первого и второго интеграторов, первый и второй выходы первого компаратора соединены с вторыми входами задания ограничения соответственно пер- вого и второго интеграторов, выход первого блока деления соединен с информационным входом первого интегратора, выход которого подключен к первому входу первого блока умножения, выход второго интеграто- ра соединен с первым входом второго блока умножения, отличающееся тем, что, с целью повышения точности моделирования, в него введены второй и третий сумматоры, третий и четвертый интеграторы, второй и третий блоки деления, блок извлечения квадратного корня, блок выделения модуля, третий источник постоянного на
0
5
0 5 0 5 0 5 0 5
пряжения, пропорционального максимальному нормальному усилию, четвертый источник постоянного напряжения, пропорционального квадратному корню максимального нормального усилия, причем первый вход первого сумматора является входом задания действующего тангенциального усилия устройства, выход первого сумматора подключен к входу делимого второго блока деления и входу третьего интегратора, выход которого является выходом формирования скорости перемещения подвижного элемента устройства и соединен с первым входом второго сумматора, выход которого подключен к входу делимого первого блока деления, выход которого соединен с первым входом второго интегратора непосредственно и через блок выделения модуля подключен к первому входу третьего блока умножения, выход которого соединен с вторым входом второго интегратора, выход которого через инвертор подключен к первому входу третьего сумматора, выход которого соединен с вторым входом третьего блока умножения, вход задания скорости изменения действующего нормального усилия устройства подключен к входу четвертого интегратора и первому входу четвертого блока умножения, выход которого соединен с входом делимого третьего блока деления, выход которого подключен к второму входу второго сумматора, вход задания начального условия интегрирования четвертого интегратора является входом задания начального значения нормального усилия устройства, выход четвертого интегратора является выходом формирования действующего нормального усилия устройства и подключен к второму входу второго блока умножения и входу блока извлечения квадратного корня, выход которого соединен с вторым входом первого блока умножения и входами делителей первого, второго и третьего блоков деления, выход второго блока деления подключен к третьему входу второго интегратора, выход второго блока умножения соединен с вторым входом первого сумматора, выход третьего источника постоянного напряжения подключен к второму сигнальному входу второго компаратора, выход четвертого источника постоянного напряжения соединен с вторым сигнальным входом и первым входом сравнения первого компаратора, выход первого интегратора подключен к вторым входам сравнения первого и второго компараторов и вторым входам третьего сумматора и четвертого блока умножения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования пары трения | 1988 |
|
SU1628062A1 |
| Устройство для моделирования силы трения | 1987 |
|
SU1543427A1 |
| Устройство для определения требуемого ресурса технического изделия | 1989 |
|
SU1714636A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2013 |
|
RU2537040C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| Устройство для определения энтропии | 1989 |
|
SU1672481A1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1990 |
|
SU1816185A1 |
| РЕЛЕ РАЗНОСТИ ЧАСТОТ ПОДКЛЮЧАЕМЫХ НА ПАРАЛЛЕЛЬНУЮ РАБОТУ ГЕНЕРАТОРОВ | 2011 |
|
RU2460193C1 |
Изобретение относится к аналоговой вычислительной технике и предназначено для применения при исследовании динамики механических систем, содержащих пары трения, с учетом зависимостей их сил сопротивления от действующих в контакте пары усилий, массы подвижного элемента пары и диссипации энергии на гистерезисное и релаксационное внутренние трения в контакте в процессе предварительного смещения подвижного элемента. Целью изобретения является повышение точности моделирования за счет учета зависимости силы упругоф- рикционного сопротивления в контакте пары от изменейий действующих одновременно тангенциального и нормального усилий. Устройство содержит три сумматора 1- 3, инвертор 4, четыре интегратора 5-8, четыре блока умножения 9-12, три блока деления 13-15, блок извлечения квадратного корня 16, блок выделения модуля 17, два компаратора 18, 19 и четыре источника постоянных напряжений 20-23. Оно имеет входы задания действующего тангенциального усилия P(t), скорости изменения действующего нормального усилия N(t) и начального значения нормального усилия NH, выходы формирования предварительного смещения подвижного элемента 5n(t), скорости перемещения подвижного элемента о (t) и действующего нормального усилия N(t) моделируемой пары трения. Цель обеспечивается введением в устройство второго 2 и третьего 3 сумматоров, третьего 7 и четвертого 8 интеграторов, второго 14 и третьего 15 блоков деления, блока извлечения квадратного корня 16, блока выделения модуля 17, третьего 22 и четвертого 23 источников постоянных напряжений и новых связей между элементами устройства. 1 ил. . . . Ј 00 4 О 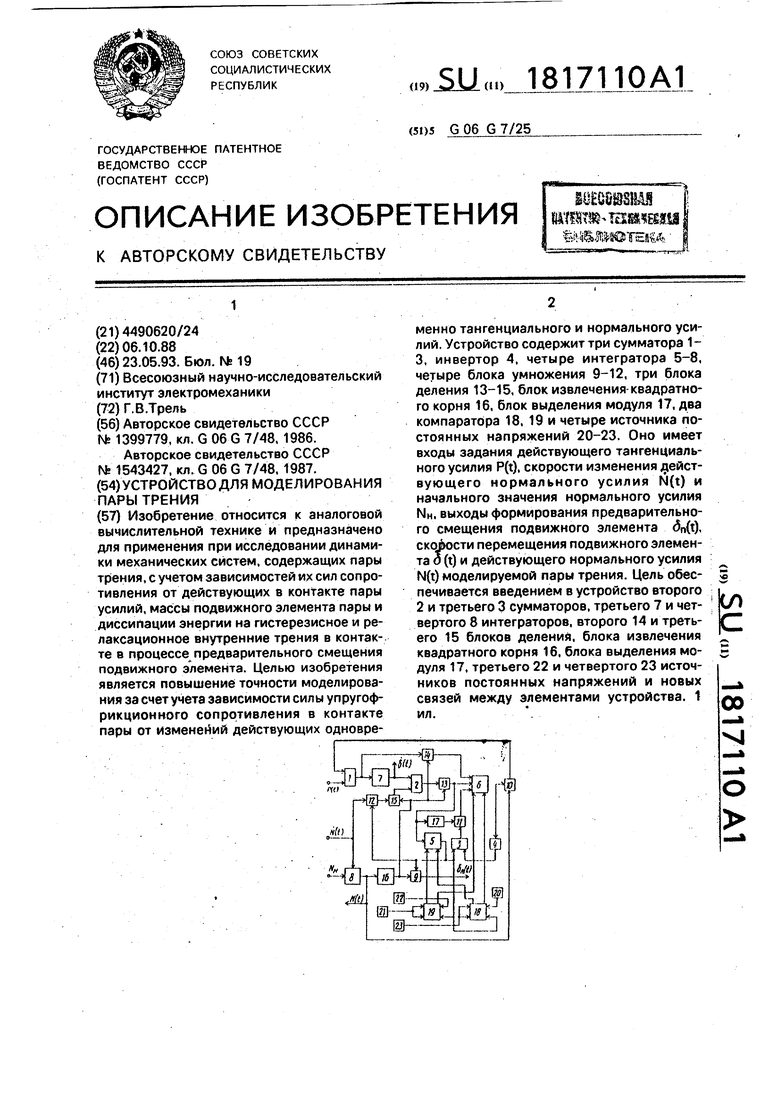
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Устройство для моделирования силы трения | 1987 |
|
SU1543427A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
