Изобретение относится к аналоговой вычислительной технике и предназначено для использования при моделировании систем с парами трения, особенно систем с релаксационными колебаниями.
Известно устройство для моделирования силы трения, содержащее вход и выход по сигналам, пропорциональным соответственно скорости относительного перемещения элементов пары и силе сопротивления этой пары, два интегросумматора, сумматор, два инвертора, два блока умножение, два ключа и четыре источника постоянных напряжений, соответствующих максимальной силе трений покоя и скольжения и предварительному смещению, .
Наиболее близким техническим решением к предлагаемому является устройство для моделирования муфт трения, принятое за прототип, которое содержит интегратор, выход которого является выходом устройства, первый и второй входы которого подключены соответстаенно к первому и второму входам первого сумматора, выход последнего соединен с входом двухполупериодногс выпрямителя, выход которого подключен к первым входам соответственно зторого и третьего сумматоров, вторые входы которых соединены соответственно с выходами первого и второго источников постойнного напряжения, выход второго сумматора подключен к первому входу блока деления, выход которого соединен с третьИЕ-.1 входом третьегс сумматора, выход последнего подк/почен к первому входу блока ограничения и к входу инвертора, выход которого соединен с вторым входом блока огра 5ичения, первый и второй входы которого подключены соотззтственно к выходу и входу интегратора, вход последнего соединен с первыми выводами перзого и второго масштабных резисторов, вторые выводы которых соединены соответственно с первым и вторым входами устрсйсткз, кроме того, в него введены дополнительные интегратор и сумматор, третий и четвертый источники постоянного напряжения и релейный усилитель, выход которого подключен к входу
дополнительного интегратора, выход последнего соединен с первым входом дополнмтельного сумматора, выход которого подключен к атерому входу блока деления, выходы третьего и четвертого источников постойнного напряжения соединены соответственное первым входом релейного усилителя, с вторым входом дополнительного сумматора, вход которого подключен к выходу второго источн1 ка постоянного напряжения, выход даухполупериодного выпрямителя соединен с вторым входом релейного усилителя.
Основным недостатком этого устройства является то, что в нем не предусмотрена возможмость учета диссипации энергии в процессе предварительного упругого смещения, кроме того, вид зависир остей коэффициента трен1.;я от скорости скольжения контактирующих поверхностей ограничен классом гиперболических функций, что обусловлено применением для зтих целей блока деления,
Целью изобретения является повышение точности моделирования упруговязких пар трения.
Поставленная цель достигается тем, что S устройство, содержащее нтегратор, в цепь отрицательной связи которого включен первый формирователь зоны нечувствительности, вход интегратора является зходом задания скорости скольжения устройс ва, вход первого блока выделения модуля соединен с входом задания скорости скольжения устройства, а выход - с входом релейного элемента, первый и второй сум 1зторы, первый инвертор, входом и выходом подключенный соответственно к первому и второму Е.ходам задания уровни ограничения первого формирователя зоны нечувствительностм и два источника постоянного напряжения, введены масштабирующее звено, второй формирователь зоны нечувствительности, второй блок выделения модуля, второй инвертор, суммирующий усилитель, в цепь обратной свйзи которого включен ограничивающий стабилотрон, апериодическое звено, в цепь обратной связи которого включен ограничивающий диод, ключевой элемент, функциональный преобразователь зависимости коэффициента трения от скорости скольжения и перемножитель, выход которого соединен со входом первого инвертора и первым входом задания уровня ограничения второго формирователя зоны нечувствительности, второй вход задания уровня ограничения которого подключен к выходу первого инвертора, вход масштабирующего звена подключен к входу задания скорости
скольжения устройства, а выход - к первому входу первого сумматора, в цепь отрицательной обратной связи которого включен второй формирователь зоны нечувствительности, второй вход первого сумматора соединен с выходом интегратора, выход первого сумматора соединен со входом второго блока выделения модуля, выход которого соединен с первым входом
0 суммирующего усилителя, второй вход которого соединен с выходом релейного элемента, выход первого инвертора подключен -; третьему входу суммирующего усилителя, четвертый вход которого соединен с выходом первого источника постоянного напряжения, выход суммирующего усилителя
подключен к первому управляющему входу
ключевого элементе и входу второго инверторз, выход которого соединен с вторым
0 управляющим входом ключевого элемента, информационный вход которого соединен с выходом первого блока выделения модуля, выход суммирующего усилителя подключен к первому входу апериодического звена,
5 второй вход которого соединен с выходом второго источника постоянного напряжения, выход ключевого элемента через функциональный преобразователь зависимости коэффициента трения от скорости скольже0 НИИ подключен к первому входу второго сумматора, второй вход которого соединен с выходом апериодического звена, выход вто-. рого сумматора подключен к первому входу перемножителя, второй вход которого подключен к входу силы нормального давления устройства, выход первого сумматора является выходом устройства.
Введение новых признаков существенно повышает точность моделирования, так
0 как позволяет учесть потери энергии,обусловленные вязким трением в упругих элементах фрикционной пары.
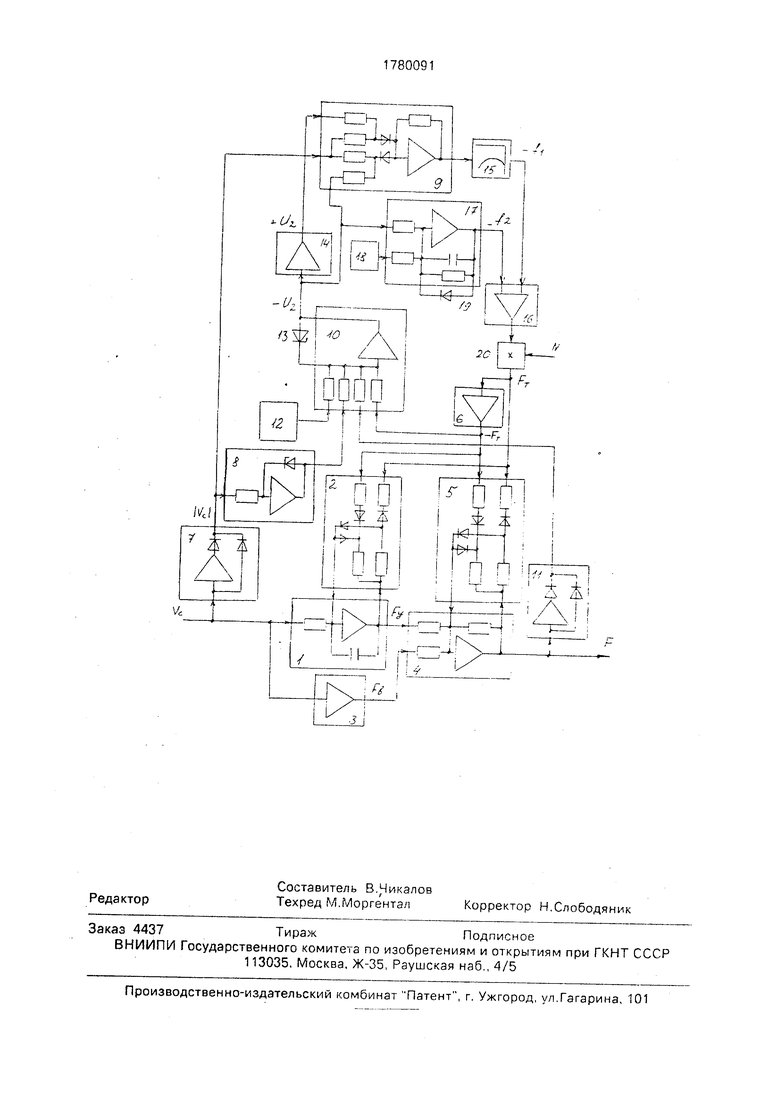
На чертеже приведена структурная схема устройства, совмещенная со структурной
5 схемой набора модели на АВМ.
Устройство для моделирования упруговязкой фрикционной пары состоит из интегратора 1, в цепь обратной отрицательной связи которого включен формирователь зоны нечувствительности 2. Вход интегратора 1 является входом задания скорости скольжения устройства. Масштабирующее звено 3 своим входом соединено с входом интегратора 1, а выходом - с первым входом
5 первого сумматора 4. Второй вход последнего подключен к выходу интегратора 1, Выход первого сумматора 4 является выходом устройства, на котором формируется сигнал F. пропорциональный силе, передаваемой ведомому элементу фрикционной пары. В
цепь обратной отрицательной связи первого сумматора 4 включен второй формирователь зоны нечувствительности 5. Первые и вторые входы задания уровней ограничения первого 2 и второго 5 формирователей зон нечувствительности объединены. К полученным общим точкам соответственно входом и выходом подключен первый инвертор 6. Первый блок выделения модуля 7 своим входом соединен с входом интегратора 1, а выходом - с входом релейного элемента 8 и информационным входом ключевого злемента 9. Суммирующий усилитель 10 первым своим входом подключен к выходу второго блока выделения модуля 11. Вход последнего соединен с выходом первого сумматора 4. Второй вход суммирующего усилителя 10 подключен к выходу релейного элемента 8, третий его вход соединен с выходом первого инвертора 6, а четвертый - с первым источником постоянного напряжения 12. В цепь отрицательной обратной связи суммирующего усилителя 10 включен ограничивающий стабилитрон 13. Первый управляющий вход ключевого элемента 9 соединен непосредственно с выходом суммирующего усилителя 10, а второй - через второй инвертор 14. Выход ключевого элемента 9 через функциональный преобразователь зависимости коэффициента трения от скорости скольжения 15 подключен к первому входу второго сумматора 16, второй вход которого соединен с выходом апериодического звена 17. Первый вход апериодического звена 17 подключен к выходу суммирующего усилителя 10, а второй - ко второму источнику постоянного напряжения 18. В цепь отрицательной обратной связи апериодического звена 17 включен ограничивающий диод 19. Выход второго сумматора 16 подключен к первому входу перемножителя 20, второй вход которого подключен к входу силы нормального давления N устройства.
Устройство работает следующим образом.
При поступлении на вход устройства сигнала пропорционального скорости относительного движения элементов фрикционной пары Vc, он через интегратор 1 и масштабирующее звено 3 поступает на входы первого сумматора 4, на выходе которого образуется сигнал, пропорциональный силе взаимодействия элементов пары F. Если при этом его уровень не превысил соответствующее текущему моменту времени значение силы т)ения FT, величина силы взаимодействия определяется выражением
F С 1 Vcdt + у8 Vc + Си.
J
°f
где Fy С Vcdt - сила упругой деформа о
ции пары трения;
Fb Д Vc - демпфирующая сила вязкого
0 трения;
Си - постоянная интегрирования, соответствующая упругому смещению элементов пары, предшествовавшему моменту подачи на вход сигнала Vc.
5 Одновременно сигнал Vc через первый блок выделения модуля 7 поступает на информационный вход ключевого элемента 9 и вход релейного элемента 8. При этом выходной сигнал последнего нейтрализует
0 влияние на работу суммирующего усилителя 10 первого источника постоянного напряжения 12, в результате чего суммирующий усилитель 10 переходит в режим сравнения сигналов пропорциональных модулю силы
5 взаимодействия , элементов пары трения |F| и текущему значению максимально достижимой силы трения FT между контактирующими элементами пары, поступающих на его первый и третий входы с выходов первого инвертора 6 и второго блока выделения модуля 11 соответственно. При достижении равенства между ними, на выходе суммирующего усилителя 10 благодаря наличию ограничивающего стабилотрона - 13
5 формируется напряжение постоянного . уровня U2 протиповоположное по знаку напряжению второго источника питания 18. Это напряжение непосредственно и через второй инвертор 14 поступает на управляющие входы ключевого элемента 9, открывая его информационный вход. В результате, сигнал пропорциональный jVc| поступает на вход функционального преобразователя зависимости коэффициента трения f i от скорости скольжения 15, обеспечивая на его выходе изменение сигнала от значения fi{0) до величины fi(Vc),соответствующей поданному на вход сигналу Vc. Одновременно на выходе апериодического звена 17 происходит изменение составляющей коэффициента трения, зависящей от времени покоя-скольжения f2(t). Причем, благодаря наличию ограничивающего диода 19, этот сигнал изменяется от уровня f2Ha4 f2MaKc,
5 определяемого длительностью предшествующего состояния взаимного покоя элементов фрикционной пары до f2 0. Оба сигнала fi(Vc) и f2(t) суммируются вторым сумматором 16 и в виде результирующего коэффициента трения f fi(Vc) + f2(t) подаются нз первый еход блока перемножения 20, на второй вход которого поступает сигнал пропорциональный силе нормального давления N. Напряжение,пропорциональное допустимой силе трения FT (fi{Vc) + f2(t)).N с выхода блока перемножения 20 непосредственно и через первый инвертор б поступает на входы задания уровней ограничений первого 2 и второго 5 формирователей зон нечувствительности. Это позволйэт обеспечить поддержание выходных сигналов интегратора 1 и первого сумматора 4 на уровне, не превышающем величину FT, так как включение в их цепи обратных связей первого 2 и второго 5 формирователей зон нечувствительности создает на их базе операционные блоки с управляемым ограничением координат. Необходимость введения ограничения координат как нз первом сумматоре 4, так и на интеграторе 1 вызвана тем, что на начальном этапе движения в процессе упругой деформации действует не только упругая сила Fy, но м де.мпфирующая FB, что приводит к тому, что, в первую очередь, предельного значен1/1я достигает сигнал на выходе первогосумма тора 4. В дальнейшем, уже в процессе начавшегося скольжения контактирующих пар, промсходит дожатие упругого элэмеитй до уровня смл трения,
Ф о р м у л S 1-1 3 о б р 8 т е н и я
Устройство для моделирования упруговязкой фрикционной пары, содержащее интегрз70р, в цель обратной отрицательной связи которого включен первый формирователь зоны нечувствительности, вход интегратора является входом задания скорости скольжения устройства, вход первого блокз выделенг я модуля соединен с входом задания скорости скольжения устройства, а выход - с входом релейного элемента, первый и второй сумматоры, первый инвертор, входом и выходом подключенный соответственно к первому и второму входам задания уровня ограничения первого формирователя зоны нечувствительности, и два источника постоянного напряжения, отличающ ее с я тем, что, с целью повышения точности, в него введены масштабирующее звено, второй формирователь зоны нечувствительности, второй блок выделения модуля, второй инвертор, суммирующий усилитель, в цепь обратной связи которого включен ограничивающий стабилитрон, апериодическое звено, в цепь обратной связи которого включен ограничивающий диод, ключевой злемент, функциональный преобразователь зависимости коэффициента трения от скорости скольжения и перемножигель, выход которого соединен с
входом первого инвертора и первым входом задания уровня ограничения второго формирователя зоны нечувствительности, аторой вход задания уровня ограничения которого подключен к выходу первого -лнsepTopa, вход масштабирующего звена подключен к входу задания скорости скольжения устройства, а выход- к первому входу первого сумматора, в цепь отрицательной обратной связи которого включен
второй формирователь зоны нечувствительности, второй вход первого сумматора соеди-нен с выходом первого интегратора, выход первого сумматора.соединен с входом второго блока выделения модуля, выход
ксторого соединен с первым входом суммирующего усилителя, второй вход которого соединен с выходом релейного элемента, выход первого инвертора подключен к третьему входу суммирующего усилителя,
четвертый вход которого соединен с выходом первого источника постоянного напряжения, выход суммирующего усилителя подключен к первому управляющему входу ключевого элемента и входу второго инвертора, выход которого соединен с вторым управляющим входом ключевого элемента, (/информационный вход которого соединен с выходом первого блока выделения модуля, выход суммирующего усилителя подключен
к первому входу апериодического звена, второй вход которого соединен с выходом второго источника постоянного напряжения, выход ключевого элемента через функциональный преобразователь зависимости
коэффициента трения от скорости скольжения подключен к первому входу второго сумматора, второй вход которого соедмнен с выходом апериодического звена, выход второго сумматора подключен к первому
входу пере.множителя, аторой вход которого подключен к входу силы нормального давления устройства, выход первого сумматора является выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования жесткой фрикционной муфты | 1990 |
|
SU1817112A1 |
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ХАРАКТЕРИСТИК | 1972 |
|
SU324636A1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано при моделировании систем с парами трения, например в системах с релаксационными колебаниями. Цель 1Х!зобре- текия - повышение точности. Для достижения поставленной цели в устройство введены формирователь зоны нечувстви- тельности, блок выделения модуля,- г^нвертор, суммирующий усилитель, апериодическое звено, ключевой элемент, функциональный преобразователь зависимости коэффициента трения от скорости скольжения и перемножитель, 1 ил.
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
