Изобретение относится к оборудованию рулетки и может быть использовано для автоматического определения сектора, в который выпал шарик.
Известны способы определения выигрышного номера, основанные на применении источников света, освещающих кольцо номеров и кольцо ячеек сепаратора, и датчиков для приема отраженных световых сигналов, установленных на внешней части рулетки, например, по патенту США №5836583 или по патенту РФ №2211067. Одним из недостатков является необходимость точной юстировки аналогового оборудования, а другим - задержка в определении выигрышного номера длительностью, как минимум, в один оборот колеса рулетки, обусловленная ожиданием подтверждения выпадения шарика.
Известны способы определения выигрышного номера, основанные на использовании видеокамеры, установленной на внешней части рулетки и генерирующей видеоданные о кольце номеров и кольце ячеек сепаратора, по патенту ЕР №1250688 или патенту Японии №2002017943. Решения свободны только от первого вышеуказанного недостатка.
Наиболее близким аналогом является способ определения выигрышного номера при игре в рулетку, примененный в патенте США №5801766 «Система безопасности, используемая за рулеточным столом», характеризующийся тем, что монохромную видеокамеру направляют на рулетку, сигнал от видеокамеры с видеоданными о рулетке, включающими область первоначального вращения шара, область кольца номеров и область кольца ячеек, преобразуют в цифровую форму, передают в устройство обработки, анализируют для определения выигрышного номера и передают сигнал о выигрышном номере для индицирования результата.
При этом при анализе сигнала идентифицируют область первоначального вращения шара, область кольца номеров и область кольца ячеек сепаратора, накапливают данные об области кольца ячеек сепаратора в отсутствие шарика, обнаруживают момент схождения шарика из области первоначального вращения в область кольца ячеек сепаратора, определяют угловое положение колеса рулетки, делают вывод о номере сектора, в котором находится шарик, и передают сигнал о выигрышном номере для дальнейшей обработки.
Однако точность применяемого способа, приемлемая для системы безопасности, недостаточна для системы определения выигрышного номера как таковой.
Целью изобретения является повышение надежности определения выигрышного номера.
Для этого в способе автоматического определения выигрышного номера при игре в рулетку цветную видеокамеру направляют на колесо рулетки, сигнал от видеокамеры с видеоданными об области кольца ячеек, разделенный на четные и нечетные полукадры, преобразуют в цифровую форму, передают в устройство обработки, анализируют для определения выигрышного номера и индицируют результат.
В результате повышения информативности анализируемого сигнала за счет применения цветной видеокамеры и удвоения количества блоков, содержащих полную информацию о состоянии рулетки и шара, надежность определения выигрышного номера возрастает. Кроме того, разделение видеосигнала на полукадры позволяет избавиться от эффектов, обусловленных чересстрочным сканированием видеокамеры.
В частном случае, при анализе сигнала от видеокамеры идентифицируют область кольца ячеек сепаратора, определяют угловое положение колеса рулетки, определяют и накапливают вероятности нахождения шарика в ячейке сепаратора для каждой ячейки сепаратора, делают вывод о номере сектора, в котором находится шарик, используя накопленные вероятности.
В другом частном случае, для рулетки с неокрашенными ячейками сепаратора дополнительно идентифицируют область кольца номеров.
Пример осуществления изобретения иллюстрируется чертежами.
Фиг.1 - схема осуществления настоящего изобретения.
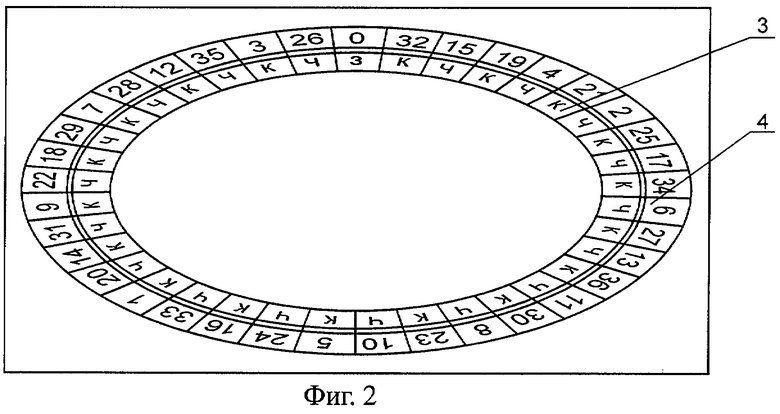
Фиг.2 - схематическое изображение полукадра видеоданных (колеса рулетки).
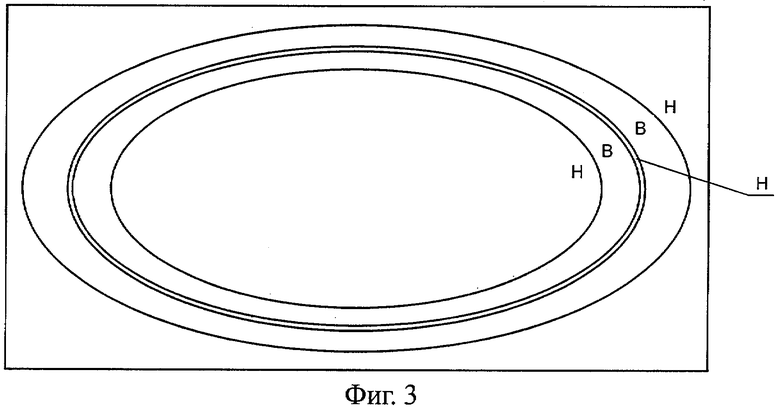
Фиг.3 - схематическое изображение поэлементной дисперсии.
Фиг.4 - схематическое изображение границ кольца ячеек.
Фиг.5 - пример представлений видеосигнала, используемых при анализе.
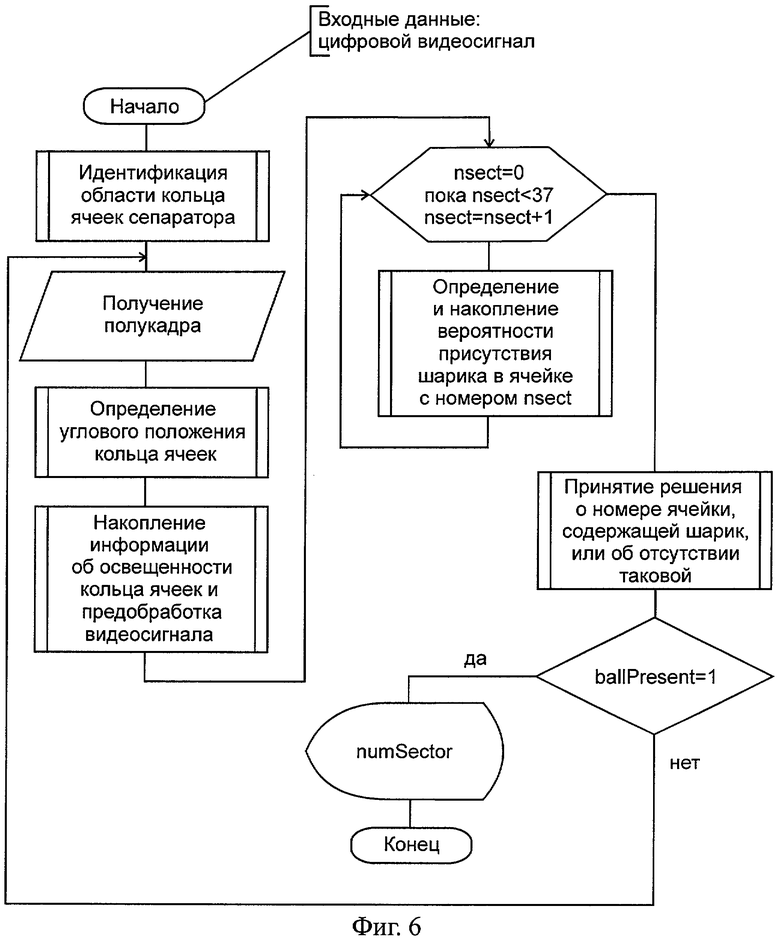
Фиг.6 - общая блок-схема алгоритма анализа сигнала видеокамеры.
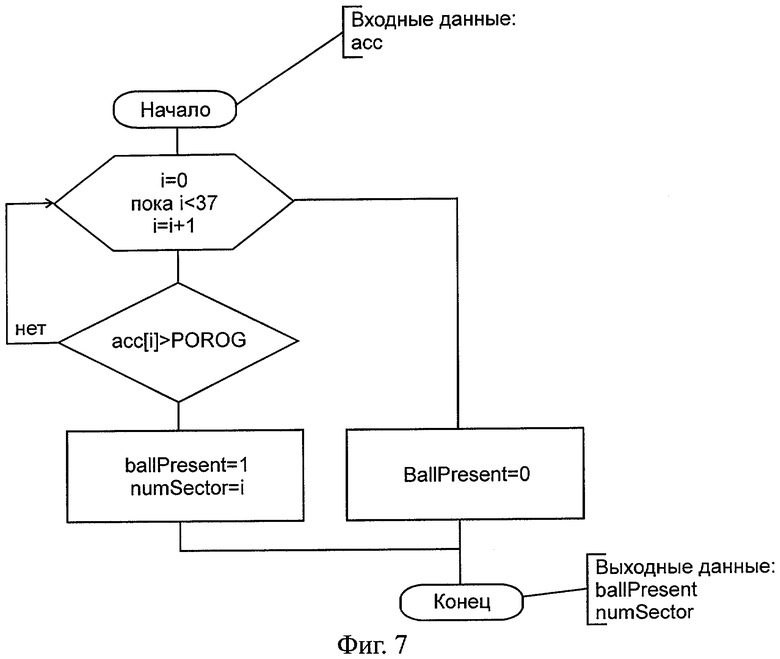
Фиг.7 - блок-схема алгоритма принятия решения.
Фиг.8 - блок-схема алгоритма идентификации кольца ячеек.
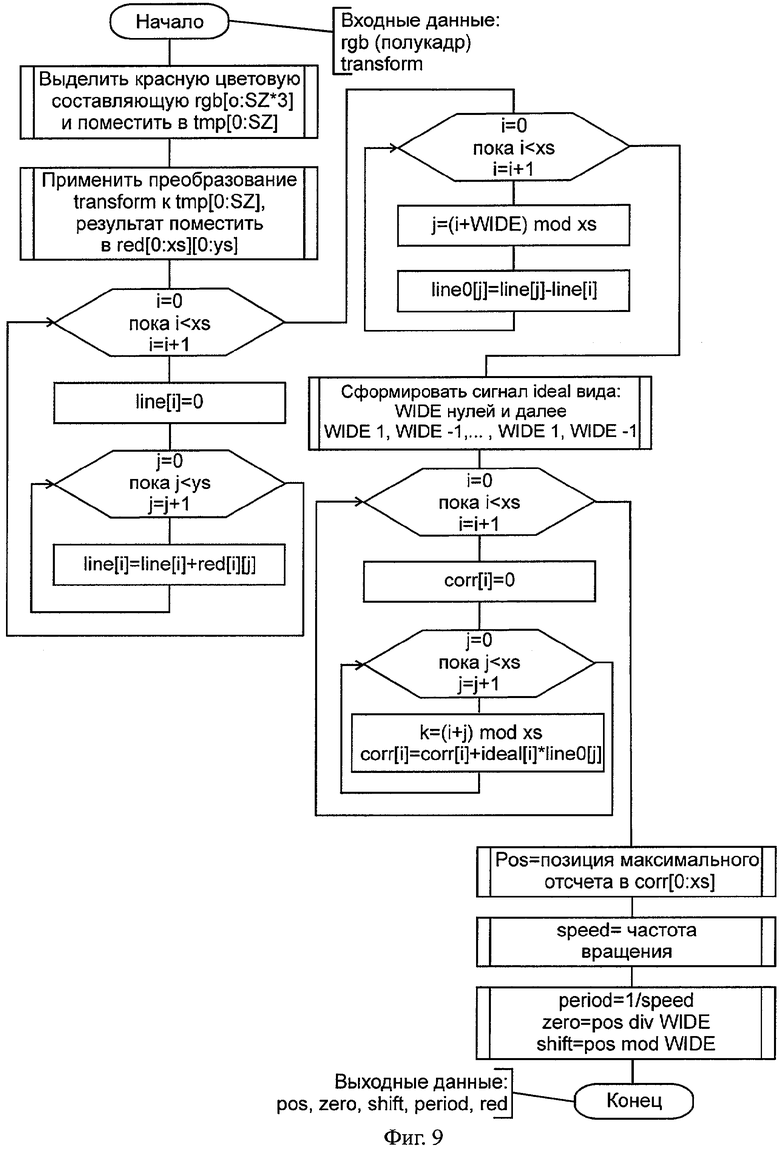
Фиг.9 - блок-схема алгоритма определения углового положения кольца ячеек.
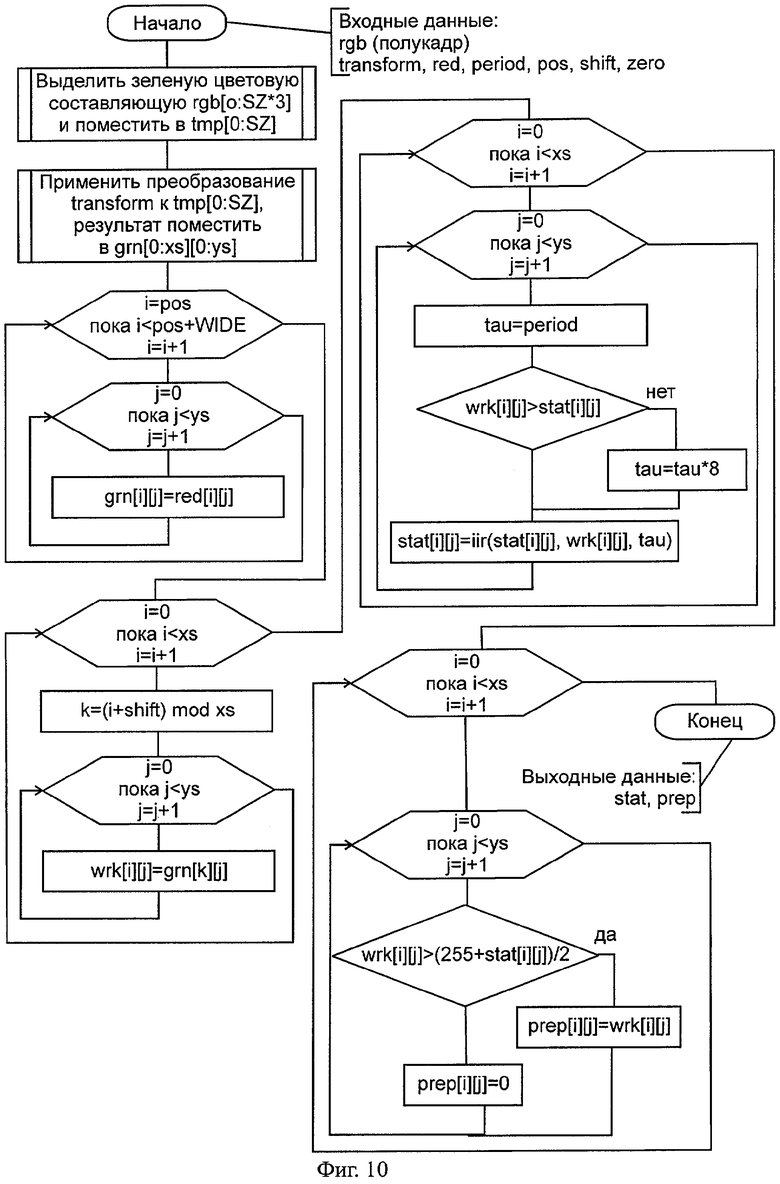
Фиг.10 - блок-схема алгоритма накопления информации об освещенности и предобработки видеосигнала.
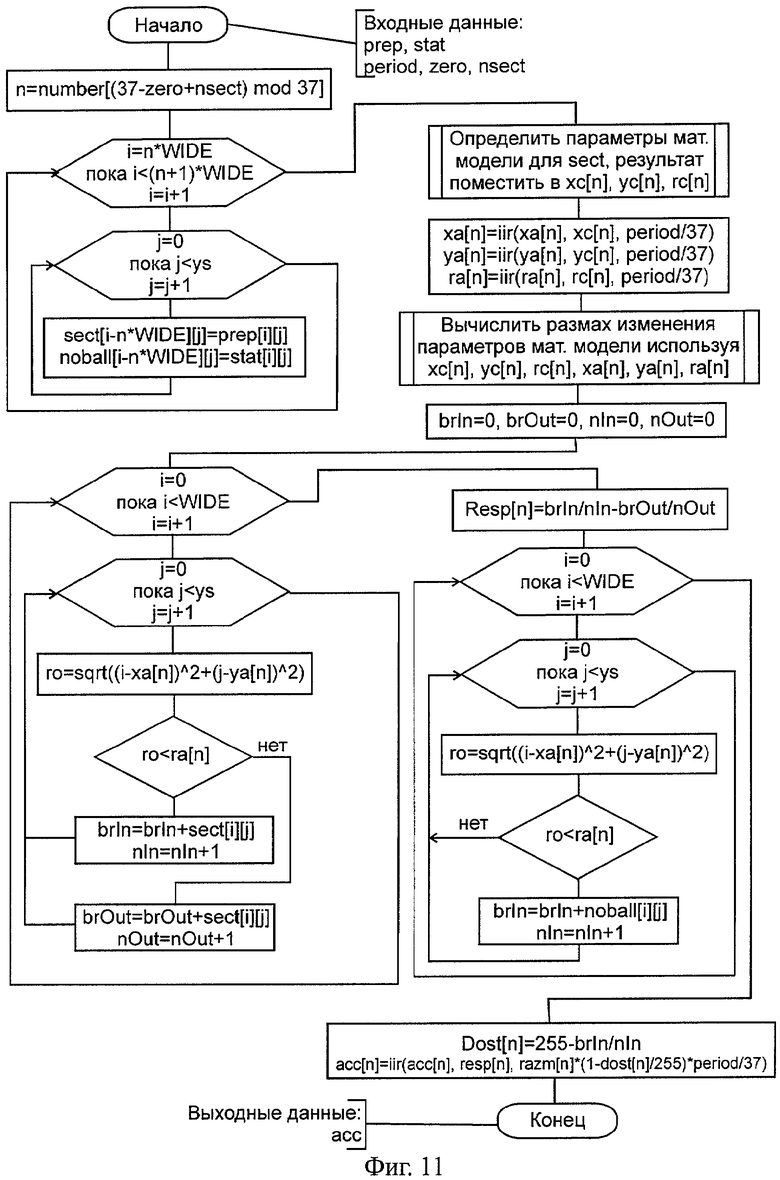
Фиг.11 - блок-схема алгоритма определения и накопления вероятности наличия шарика в ячейке.
На чертежах сделаны следующие обозначения:
1 - видеокамера,
2 - колесо рулетки,
3 - кольцо ячеек сепаратора,
4 - кольцо номеров,
5 - табло,
6 - вычислительное устройство,
Ч - черный сектор,
К - красный сектор,
З - зеленый сектор,
В или  - высокий уровень сигнала,
- высокий уровень сигнала,
С или  - средний уровень сигнала,
- средний уровень сигнала,
Н или  - низкий уровень сигнала.
- низкий уровень сигнала.
На блок-схемах сделаны следующие обозначения:
ballPresent - признак наличия шара в ячейке,
numSector - номер ячейки, в которой находится шар,
SZ - количество точек в полукадре (768*288 для полукадра стандарта PAL, оцифрованного процессором ВТ878),
N - количество полукадров, используемых при идентификации области кольца ячеек,
rgb[SZ*3] - массив для хранения красной, зеленой и синей цветовых составляющих одного полукадра видеосигнала,
tmp[SZ] - массив для хранения одной из цветовых составляющих одного полукадра,
frames [N][SZ] - массив для хранения красной цветовой составляющей N полукадров,
disp[SZ] - массив для хранения поэлементной дисперсии,
points[SZ] - массив для хранения изображения границ кольца ячеек,
transform[9] - параметры преобразования координат,
div - операция целочисленного деления,
mod - операция взятия остатка от целочисленного деления,
sqrt - вычисление корня квадратного,
∧ - операция возведения в степень,
* - операция умножения,
ys - высота изображения кольца ячеек,
xs - ширина изображения кольца ячеек,
WIDE - ширина изображения одной ячейки, примем WIDE=ys, соответственно xs=37*ys, ys=14,
red[xs][ys] - полное изображение красной цветовой составляющей кольца ячеек,
grn[xs][ys] - полное изображение зеленой цветовой составляющей кольца ячеек,
line[xs] - сигнал, представляющий результат суммирования массива red по столбцам,
line0[xs] - центрированный сигнал, полученный из line,
ideal[xs] - идеальный сигнал,
corr[xs] - отсчеты корреляционной функции центрированного и идеального сигнала,
pos - горизонтальная позиция ячейки ′ZERO′ на полном изображении (угловое положение кольца ячеек),
shift - горизонтальная позиция первой ячейки на полном изображении,
zero - порядковый номер ячейки ′ZERO′ на полном изображении,
speed - частота вращения рулетки - количество оборотов за время формирования одного полукадра видеосигнала,
period - период вращения рулетки - величина, обратная частоте,
yi=iir(yi-1,xi,w) - БИХ-фильтр вида уi=(yi-1*(w-1)+xi)/w, где w>1,
tau - постоянная времени БИХ-фильтра,
wrk[xs][ys] - полное изображение для накопления информации об освещенности ячеек,
stat[xs][ys] - полное изображение с накопленной информацией об освещенности ячеек,
prep[xs][ys] - полное изображение, сформированное для определения наличия шарика,
nsect - порядковый номер анализируемой ячейки на полном изображении,
n - реальный номер, соответствующий анализируемой ячейке,
numbers - массив, содержащий номера ячеек в порядке их следования на колесе рулетки; для рулетки с одним нулем numbers имеет вид: 0, 32, 15, 19, 4, 21, 2, 25, 17, 34, 6, 27, 13, 36, 11, 30, 8, 23, 10, 5, 24, 16, 33, 1, 20, 14, 31, 9, 22, 18, 29, 7, 28, 12, 35, 3, 26,
sect[xs][xs] - изображение одной ячейки, содержащее видеоданные из prep,
noball[xs][xs] - изображение одной ячейки, содержащее видеоданные из stat,
хс[37], ус[37], rc[37] - параметры математических моделей (окружностей) для изображений ячеек (координаты центров окружностей и радиусы, соответственно),
ха[37], уа[37], ra[37] - накопленные параметры математических моделей,
razm[37] - размах изменения параметров математических моделей во времени,
ro - расстояние от анализируемой точки до центра окружности,
brIn - суммарная яркость точек, лежащих внутри окружности,
brOut - суммарная яркость точек, лежащих вне окружности,
nIn - количество точек, лежащих внутри окружности,
nOut - количество точек, лежащих вне окружности,
resp[37] - мгновенная вероятность нахождения шарика в каждой ячейке,
dost[37] - достоверность определения вышеописанной вероятности,
acc[37] - накопленная вероятность нахождения шарика в каждой ячейке,
POROG - пороговое значение вероятности, используемое для принятия решения.
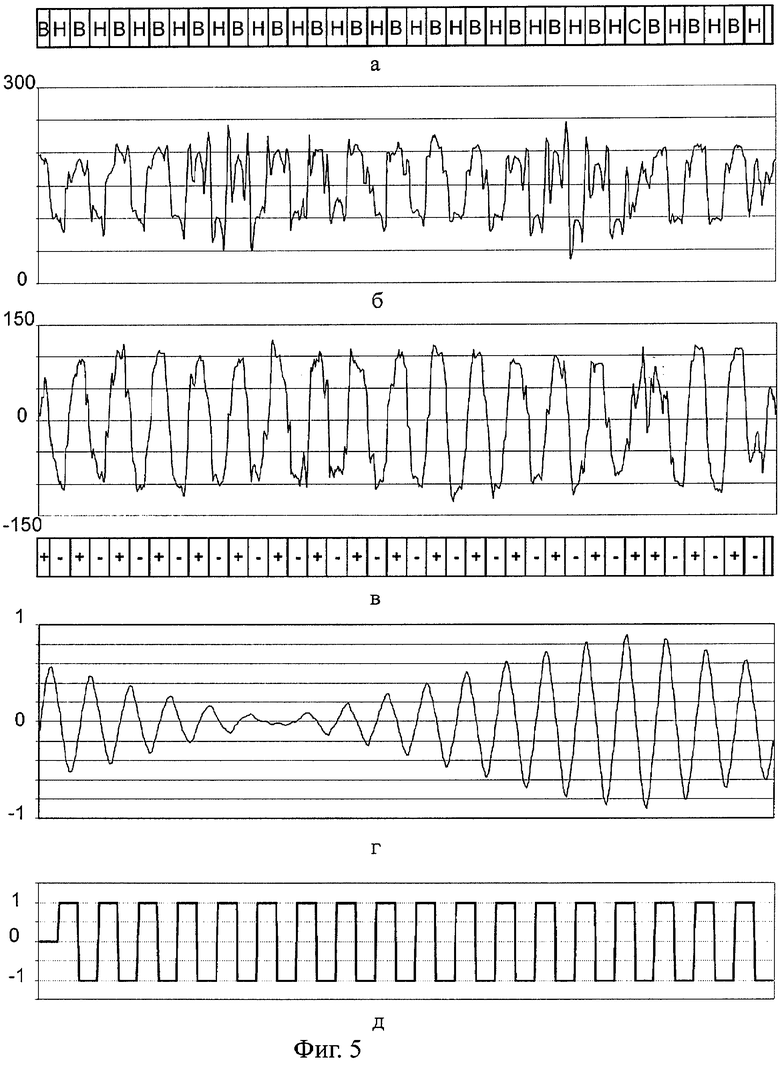
На Фиг.5 сделаны следующие обозначения:
а - схематическое представление изображения red,
б - схематическое представление сигнала line,
в - схематическое представление сигнала line0,
г - схематическое представление отсчетов corr,
д - схематическое представление сигнала ideal,
е - схематическое представление изображения grn,
ж - схематическое представление изображения wrk,
з - схематическое представление изображения stat,
и - схематическое представление изображения prep при наличии шарика в ячейке,
к - схематическое представление изображения prep при отсутствии шарика в ячейке,
л - схематическое представление изображения sect при наличии шарика,
м - схематическое представление изображения sect при отсутствии шарика.
Способ осуществляют, например, следующим образом.
Цветную видеокамеру 1 с чересстрочным сканированием и видеосигналом стандарта PAL composite размещают над колесом 2 рулетки таким образом, чтобы ее обзор охватывал кольцо 3 ячеек сепаратора, как, например, на Фиг.1 - в верхней части табло 5. Видеокамера 1 может размещаться под разными углами относительно плоскости стола: от 90°, когда она расположена над рулеткой, до 30°, когда она перестает "видеть" кольцо 3 ячеек сепаратора.
Сигнал от видеокамеры с видеоданными о колесе рулетки, разделенный на четные и нечетные полукадры, преобразуют в цифровую форму и передают в устройство обработки. При этом применяют известные и традиционные для большинства видеокамер средства телевизионного стандарта PAL (или, возможно, SECAM, или NTSC). Минимальным блоком, содержащим информацию о наблюдаемой сцене, является кадр. Для всех стандартов характерна чересстрочная передача изображения, т.е. сначала передаются все нечетные строки изображения (называемые четным полем кадра или четным полукадром), а затем все нечетные строки (называемые нечетным полем кадра или нечетным полукадром). Во время формирования видеосигнала для нечетного полукадра видеокамера накапливает видеоданные для четного полукадра. Во время формирования видеосигнала для четного полукадра видеокамера накапливает видеоданные для нечетного полукадра. То есть чересстрочная природа видеосигнала обуславливает чересстрочное сканирование видеокамеры. Таким образом, видеоданные, содержащиеся в одном кадре, можно разделить на два блока - четный и нечетный полукадр. Видеоданные в этих блоках соответствуют состоянию (или изображению) наблюдаемой сцены в разные моменты времени (для стандарта PAL временной интервал между ними составляет 1/50 секунды). Если в наблюдаемой сцене присутствуют движущиеся объекты, то в четном полукадре и нечетном полукадре они будут находиться в разных положениях (так называемый interlacing или «эффект гребенки»). В том случае, если наблюдаемой сценой является вращающаяся рулетка и движущийся шарик, данный эффект проявляется достаточно сильно. В этом случае видеоданные, более адекватно описывающие состоянии рулетки и шарика, содержит не полный кадр, а каждый из его полукадров. Таким образом, для цели последующего анализа число блоков, содержащих информацию о состоянии рулетки и шарика, удваивается, а качество видеоданных в каждом блоке улучшается.
Преобразование данных в цифровую форму заключается в дискретизации видеосигнала по времени и последующей дискретизации амплитуды сигнала. Результатом преобразования части видеосигнала, соответствующей одной строке изображения, является последовательность дискретных значений яркости точек изображения данной строки.
В соответствии с блок-схемой Фиг.6 дан анализ сигнала видеокамеры.
В соответствии с блок-схемой Фиг.8 идентификация области кольца 3 ячеек сепаратора предполагает нахождение части видеосигнала, несущего полезную информацию о наличии шарика в ячейке и об угловом положении вращающейся части колеса 2 рулетки. Кроме того, строится преобразование видеосигнала из системы координат, привязанной к видеокамере, в систему координат, привязанную к кольцу ячеек. Далее изображением будем называть видеосигнал, преобразованный в систему координат, привязанную к кольцу ячеек. Далее изображением какого-либо объекта будем называть часть изображения, содержащую видеоданные об этом объекте. Далее изображением какой-либо цветовой составляющей будем называть часть изображения, содержащую видеоданные, относящиеся к этой цветовой составляющей. Далее полным изображением будем называть изображение области кольца 3 ячеек. Для N полукадров выполняют следующие действия: получение полукадра в массив rgb, выделение красной цветовой составляющей полукадра и помещение ее в очередную позицию массива frames. Ячейки сепаратора и номера окрашены в три цвета: черные ячейки, красные ячейки и одна ячейка зеленого цвета ′ZERO′. В красной цветовой составляющей черные ячейки имеют низкий уровень яркости, красные ячейки - высокий, зеленая ячейка - средний. При вращении колеса рулетки в точках полукадра, принадлежащих кольцу ячеек и кольцу номеров, уровень яркости меняется от низкого к высокому, а в остальных точках уровень яркости остается постоянным. Вычислим для каждой точки полукадра дисперсию (центральный момент второго порядка) ее яркости и поместим результат в массив disp. Поскольку дисперсия характеризует величину разброса яркости, то для точек, принадлежащих кольцу ячеек и кольцу номеров, значение дисперсии будет высоким, а для всех остальных - близко к нулю (Фиг.3). Отберем из массива disp точки, соответствующие внутреннему кольцу, удалив остальные. Данное множество точек соответствует кольцу ячеек и описывает искомую часть видеосигнала. Работать с видеосигналом, представленным в исходной форме, неудобно. Наиболее удобной формой представления видеоданных о кольце ячеек является прямоугольный массив, в котором все ячейки прямоугольные и имеют одинаковую ширину. Построим преобразование видеосигнала в эту форму. Для этого отберем точки массива disp, в окрестности которых находятся как точки с большим значением яркости, так и с малым, и поместим в массив points. Полученное множество точек представляет собой границы кольца ячеек. Оптическая система камеры выполняет проективное преобразование координат из трехмерной системы координат наблюдаемой сцены в двумерную систему координат, привязанную к светочувствительной матрице (назовем ее М), а в частности из двумерной системы координат, привязанной к плоскости кольца ячеек сепаратора (назовем ее Т), в систему координат М. Данное преобразование описывается пятью параметрами {xp,yp,a,b,d}: двумя координатами пересечения главной оптической оси объектива с плоскостью кольца ячеек (хр,ур), углом наклона главной оптической оси (а), углом поворота светочувствительной матрицы вокруг главной оптической оси (b) и расстоянием от камеры до плоскости кольца ячеек (d). Построим обратное преобразование с тем же набором параметров.
Построим критерий оценки качества обратного преобразования для произвольных значений параметров. Для этого применим обратное преобразование для координат всех ненулевых точек из points, аппроксимируем координаты полученных точек двумя концентрическими окружностями, используя методы регрессионного анализа, и вычислим среднеквадратическое отклонение точек от полученных окружностей. Если параметры {xp,yp,a,b,d} соответствуют параметрам истинного преобразования, то обратное преобразование переведет точки points из системы координат М в точки, лежащие на границах кольца ячеек в системе координат Т. Границы кольца ячеек в системе координат Т представляют собой две концентрические окружности, и тогда среднеквадратическое отклонение их координат от аппроксимирующих кривых будет близко к нулю. Применяя методы численной минимизации (симплекс-метод), найдем параметры {xp,yp,a,b,d}, минимизирующие значение критерия оценки. Тогда прямое преобразование с найденными координатами будет являться истинным преобразованием, осуществляемым оптической системой видеокамеры. Применим обратное преобразование с найденными параметрами для координат всех ненулевых точек из points. Аппроксимируем полученные точки двумя концентрическими окружностями. Параметрами аппроксимации являются {х0,у0,r1,r2} - центр и радиусы окружностей в системе координат, привязанной к плоскости кольца ячеек. Используя параметры {х0,у0}, построим преобразование из прямоугольной системы координат Т в плоскости кольца ячеек в полярную систему координат (Р), привязанную к найденным окружностям в плоскости кольца ячеек.
После применения полученного преобразования к исходному видеосигналу область кольца ячеек будет представлять собой прямоугольник с углами (R=r1;phi=0) и (R=r2;phi=2*PI).
Построим линейное преобразование координат с параметрами {r1,r2}: x=xs*phi/(2*PI), y=ys*(R-r1)/(R-r2).
После применения данного преобразования к полученной области она преобразуется в прямоугольник с углами (х=0;y=0) и (x=xs;y=ys).
Построим композицию трех преобразований:
- обратное преобразование с параметрами {xp,yp,a,b,d} из М в Т,
- преобразования с параметрами {х0,y0} из Т в Р,
- линейного преобразования с параметрами {r1,r2}.
Полученное преобразование с параметрами {xp,yp,a,b,d,x0,y0,r1,r2} назовем transform. Поместим найденные параметры в массив transform. Далее «применим преобразование transform» означает применение полученного преобразования с параметрами из массива transform. Результатом применения данного преобразования ко всем точкам полукадра является множество точек, являющееся изображением кольца ячеек сепаратора в искомом виде, представленном на Фиг.5а.
Для определения углового положения кольца ячеек (Фиг.9) получим полукадр в массив rgb, выделим красную цветовую составляющую полукадра, поместим ее в массив tmp. К точкам из массива tmp применим преобразование transform, результат поместим в изображение red. Изображение red, полученное в результате преобразования, представляет собой прямоугольник, содержащий в себе 37 одинаковых прямоугольных областей, являющихся изображениями ячеек сепаратора (Фиг.5а). Изображения красных ячеек имеют высокий уровень яркости, черных - низкий, а зеленого - средний. Суммируя значения яркости изображения red по столбцам и помещая результат в массив line, формируем одномерный сигнал, характеризующий изменение яркости изображения от ячейки к ячейке (Фиг.5б). Высокий уровень сигнала соответствует красным ячейкам, низкий уровень сигнала соответствует черным ячейкам, средний уровень сигнала соответствует ′ZERO′. Всплески на границах ячеек обусловлены блестящими металлическими разделителями между ячейками. Для устранения всплесков и центрирования сигнала циклически сдвигаем сигнал влево на ширину одной ячейки WIDE, вычитаем его из исходного сигнала и помещаем результат в массив line0. Полученный сигнал является центрированным (т.е. с нулевым математическим ожиданием) и представлен на Фиг.5в. Высокий уровень сигнала соответствует красным ячейкам, низкий уровень сигнала соответствует черным ячейкам, уровень сигнала, соответствующий ′ZERO′, вообще говоря, не определен.
Формируем идеальный сигнал ideal (Фиг.5д), содержащий уровни 1, -1 и 0, чередующиеся в соответствии с расположением ячеек (черной соответствует -1, красной соответствует 1, зеленой 0). Вычисляем корреляционную функцию сигналов line0 и ideal, результат помещаем в corr (Фиг.5г).
Позиция максимума pos корреляционной функции является горизонтальным положением ′ZERO′ относительно левого края line0 (и полного изображения). Данную величину будем считать угловым положением кольца ячеек.
На основе pos и его предыдущих значений, используя уравнение линейной регрессии, вычисляем speed - скорость изменения pos во времени, или, что то же самое, частоту вращения колеса рулетки, результат поместим в speed. Вычислим period=1/speed. Исходя из того, что pos=zero*WIDE+shift, где WIDE - ширина изображения ячейки, вычислим горизонтальное смещение первой ячейки на полном изображении, поместим результат в shift, вычислим порядковый номер ячейки ′ZERO′ на полном изображении, поместим результат в zero. Обладая информацией о положении ячейки ′ZERO′ на полном изображении и зная характерный порядок чередования номеров (одинаковый для всех рулеток с одним нулем), можно сопоставить ячейкам на полном изображении их реальные номера.
Накопление информации об освещенности кольца ячеек и предобработка видеосигнала производится в соответствии с Фиг.10. Получим полукадр в массив rgb, выделим зеленую цветовую составляющую полукадра, поместим ее в массив tmp. К точкам из массива tmp применим преобразование transform, результат поместим в изображение grn. Изображение grn, полученное в результате преобразования, представляет собой прямоугольник, содержащий в себе 37 одинаковых прямоугольных областей, являющихся изображениями ячеек сепаратора (Фиг.5е). Изображения красных ячеек имеют средний уровень яркости, черных - низкий, а зеленого - высокий, на границах ячеек могут присутствовать области с высоким уровнем яркости, являющиеся изображениями металлических разделителей. Нужно заметить, что изображение ячейки ′ZERO′ имеет высокую яркость, и на его фоне шарик различить невозможно. Заменим данные изображения grn на данные изображения red в точках, соответствующих зеленому сектору (горизонтальная координата от shift+zero*WIDE до shift+(zero+1)*WIDE). После этого изображение ′ZERO′ в grn становится средней яркости, и шарик будет на нем различим.
Циклически сдвинем изображение gm на величину shift влево, выровняв его, таким образом, на границу ячейки, и поместим результат в wrk. Этим достигается неизменное положение разделителей на изображении wrk независимо от их исходного положения на изображении grn.
Далее неоднократно используется одномерный фильтр с бесконечно импульсной характеристикой (БИХ-фильтр, IIR-filter), рекуррентно задаваемый в виде yi=(yi-1*(w-1)+xi)/w, где w>1. Далее будем пользоваться записью yi=iir(y,x,w). Параметр w является постоянной времени и определяет, насколько выход фильтра y чувствителен к входным данным хi, чем больше w, тем меньше чувствительность.
Применим БИХ фильтр ко всем элементам изображения wrk следующим образом: stat[i][j]=iir(stat[i][j], wrk[i][j], tau). Если stat[i][j]<wrk[i][j], то значение tau равно period, что соответствует использованию при фильтрации видеоданных за один оборот рулеточного колеса. Если stat[i][j]>wrk[i][j], то значение tau равно 8*period, что соответствует использованию при фильтрации видеоданных за восемь оборотов рулеточного колеса.
Использование данных не менее чем за оборот колеса гарантирует, что наличие шара в ячейке не окажет заметного влияния на результат фильтрации. Выбор различных постоянных времени в зависимости от соотношения яркости исходного и результирующего изображений обеспечивает накопление в изображении stat наибольших возможных значений яркости изображений wrk (Фиг.5з).
Изображение stat является эталонным в том смысле, что точки изображения wrk, являющиеся изображением шара, превышают по яркости соответствующие точки изображения stat, а все остальные точки wrk не ярче соответствующих точек stat.
Заполним изображение prep значениями нулевой яркости. Поместим в prep те значения wrk[i][j], которые ближе к максимально возможной яркости, чем к соответствующему значению stat[i][j]. Ненулевые значения prep возникают или в месте положения шара (Фиг.5и), или в месте проявления шумовых помех (Фиг.5к).
Определение и накопление вероятности присутствия шара в каждой ячейке сепаратора выполняется в соответствии с Фиг.11. Для каждой ячейки изображения prep определим порядковый номер ячейки на изображении и поместим его в nsect. Вычислим соответствующий этой ячейке номер на кольце номеров n=numbers[(37-zero+nsect) mod 37]. Отбираем из изображения prep данные об этой ячейке в массив sect (см. Фиг.5л и Фиг.5м). Отбираем из изображения stat данные об этой ячейке в массив noball. Поскольку изображение шара в ячейке близко к яркому кругу на темном фоне, выберем математическую модель описания изображения шара в виде окружности с координатами центра (х,у) и радиусом r.
Для всех точек массива sect вычислим их центр масс:
x0=sum(xi*bri)/sum(bri), где sum - оператор суммирования, хi - горизонтальная координата i-ой точки, a bri - яркость i-ой точки.
y0=sum(yi*bri)/sum(bri), где sum - оператор суммирования, yi - вертикальная координата i-ой точки, a bri - яркость i-ой точки.
Также вычислим среднее отклонение точек от их центра масс:
r0=2*sum(sqrt((yi-y0)∧2+(xi-x0)∧2)*bri)/sum(bri), где sum - оператор суммирования,
sqrt - оператор квадратного корня, yi - вертикальная координата i-ой точки, хi - горизонтальная координата i-ой точки, a bri - яркость i-ой точки.
Данные величины будут параметрами математической модели для конкретной ячейки, поместим их в хс[n], yc[n] и rc[n].
Применим к полученным данным БИХ-фильтр:
xa[n]=iir(xa[n],xc[n],period/37)
ya[n]=iir(ya[n],yc[n], period/37)
ra[n]=iir(ra[n],rc[n], period/37)
Постоянная времени выбрана таким образом, что накопление параметров математической модели происходит с учетом видеоданных за поворот колеса на одну ячейку. Одновременно вычисляется суммарное отклонение текущих параметров от накопленных и помещается в raz. Накапливаем среднее отклонение параметров (размах их изменения во времени): razm[n]=iir(razm[n],raz,period/37). Выпавший шар неподвижен относительно ячейки, и параметры его математической модели стационарны, следовательно, чем больше величина razm[n], тем менее вероятно нахождение в ячейке шара.
Вычисляем среднюю яркость точек из sect, попадающих внутрь окружности (xa[n],ya[n],ra[n]), и среднюю яркость точек, лежащих вовне, помещаем их разность в resp[n], которое отражает вероятность нахождения шара в ячейке n. В случае, если шар действительно находится в ячейке, яркость внутренних точек будет высока, яркость внешних - низка, и, в результате, resp[n] будет содержать значение, близкое к максимально возможной яркости. В случае, если шара в ячейке нет и нет шумовой помехи, яркость внутренних и внешних точек будет низка, и, в результате, resp[n] будет содержать значение, близкое к нулевому. В случае, если шара в ячейке нет, и присутствует шумовая помеха, яркость внутренних и внешних точек будет ненулевой, но скомпенсируется вычитанием, и, в худшем случае, resp[n] будет содержать небольшое положительное значение.
Вычисляем среднюю яркость точек из noball, попадающих внутрь окружности (xa[n],ya[n],ra[n]), вычитаем ее из значения максимально возможной яркости(255), помещаем разность в dost[n], которое отражает достоверность определения resp[n].
Чем больше уровень яркости изображения ячейки в отсутствие шара, тем меньшую амплитуду будет иметь полезный сигнал, и тем менее достоверны выводы, сделанные на его основе. Накапливаем вероятность нахождения шара в ячейке n:
acc[n]=iir(acc[n],resp[n],razm[n]*(1-dost[n]/255)*period/37).
Постоянная времени выбрана так, что накопление производится с учетом данных за поворот колеса на одну ячейку, а также с использованием достоверности текущего значения resp[n] (значения, имеющие малую достоверность, в меньшей степени учитываются при накоплении).
Решение о номере выигрышной ячейки принимают (Фиг.7), просматривая массив накопленных вероятностей. Значение POROG выбирают экспериментально, полагая, что оно является наименьшим из значений, при которых отсутствуют ложные срабатывания системы. Такой выбор POROG обеспечивает наименьшее время отклика системы при отсутствии ошибочных результатов. Если какая-либо вероятность превышает предустановленное значение POROG, то принимается решение о наличии шара в этой ячейке, значение ballPresent выставляется в 1, а в переменную numSector записывается номер выигрышной ячейки.
Полученный в результате анализа выигрышный номер индицируют на табло 5.
Приведенный алгоритм может быть использован для определения выигрышного номера при игре в разновидность рулетки с неокрашенными ячейками сепаратора. В этом случае очевидная модификация алгоритма состоит в том, что кроме области кольца 3 ячеек идентифицируют и используют в анализе аналогичным образом также окрашенную область кольца 4 номеров.


Способ автоматического определения выигрышного номера при игре в рулетку для повышения эффективности в пользовании заключается в использовании цветной видеокамеры, которую направляют на колесо рулетки, а сигнал от нее преобразуют в цифровую форму и передают в устройство обработки. 2 з.п. ф-лы, 11 ил.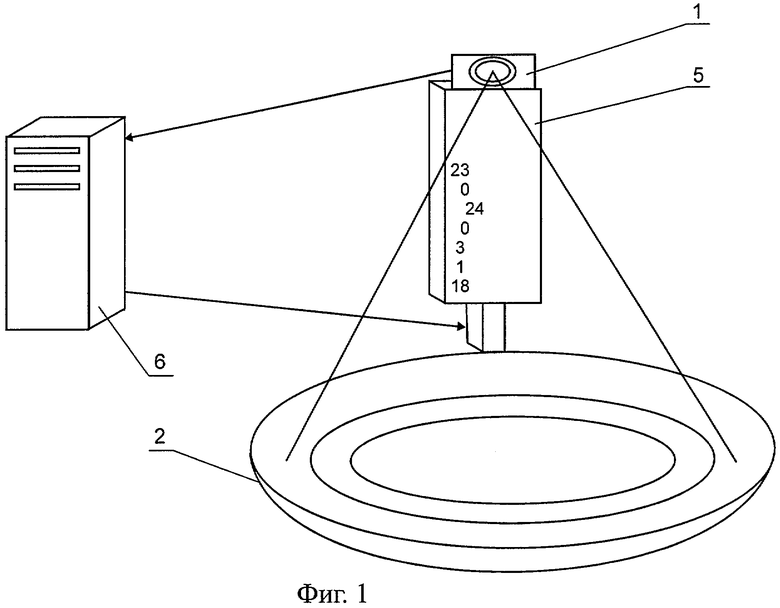
| US 5801766 А, 01.09.1998 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЫИГРЫШНОЙ КОМБИНАЦИИ ПРИ ИГРЕ В РУЛЕТКУ | 1994 |
|
RU2122878C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВОЛНОВОДА ПЕРЕМЕННОГО СЕЧЕНИЯ | 2009 |
|
RU2395139C1 |
| ВЯЖУЩЕЕ ДЛЯ ДОРОЖНОГО СТРОИТЕЛЬСТВА | 2005 |
|
RU2303575C2 |
| DE 3233405 A1, 15.03.1984. | |||

