Изобретение относится к электротермии и может быть использовано для независимого регулирования мощности дуг в фазах ДСП.
Цель изобретения - повышение надежности работы путем уменьшения дисперсии токов дуг.
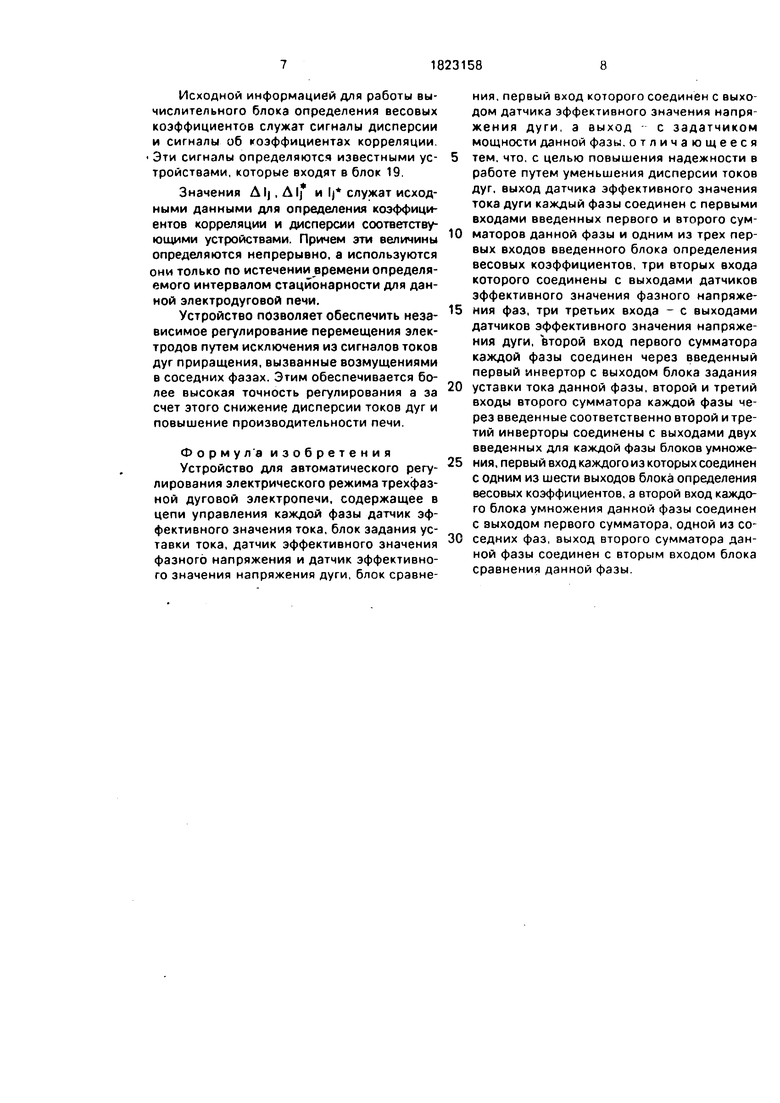
На чертеже представлена функциональная схема устройства.
Устройство содержит датчики эффективных значений токов дуг 1-3, датчики эффективных значений фазных напряжений 4-6, датчики эффективных значений напряжения дуг 7-9, блоки задания уставок токов
дуг 10-12, инверторы 13-15, сумматоры 16- 18, блок определения весовых коэффициентов 19, блоки умножения 20-25, инверторы 26-31, выходные сумматоры 32-34, блоки сравнения 35 -35 .
Сигналы с датчиков токов дуг Т-3 поступают на первые входы каждой пары сумматоров 16 и 32, 17 и 33, 18 и 34. Сигналы с блоков задания уставок токов дуг 10-12 через инверторы 13-15 поступают на вторые входы сумматоров 16-18 соответственно. Сигналы с блоков определения весовых коэффициентов 19 поступают на первые входы соответствующих блоков умножения
оо ю
00
сл
00
20-25. Сигналы с выходов сумматоров 16- 18 поступают на вторые входы 22 и 25, 20 и 24.21 и 28 блоков умножения соответственно. Сигналы с выходов блоков умножения 20 и 21, 22 и 23, 24 и 25 поступают через инверторы 26-31 нэ второй и третий вход выходных сумматоров 32-34 соответственно.
Сигналы с выходов сумматоров 32-34 поступают на один из входов соответствующих блоков сравнения 35 -35 , на вторые входы которых поступают сигналы с соответствующих датчиков эффективных значений напряжений дуг 7-9. Сигналы с выходов блоков сравнения поступают в регуляторы своих фаз. Сигналы с датчиков токов 1-3, датчиков напряжений 4-9 поступают на соответствующие входы блока определения весовых коэффициентов 19,
На вход каждого блока сравнения 351-353 поступает сигнал тока своей фазы, в котором отсутствуют приращения токов вызванных возмущениями в соседних фазах из-за действия первого закона Кирхгофа. Эти приращения вычитаются из сигналов токов дуг в сумматорах 32-34, При таком способе регулирования исключаются ложные срабатывания регулятора, когда он отрабатывает чужие возмущения. В этом заключается независимость регулирования мощности дуг.
Значения весовых коэффициентов а.,. Оз ,. ..Дз. определяемых блоком 19, можно определить на основании статических характеристик токов дуг (дисперсия, коэффициенты кореляции). Эти коэффициенты определяются на протяжении определенного периода времени (период обучения), а затем эти значения используются системой регулирования на протяжении рабочего периода.
Распределение токов по фазам ДСП за счет первого закона Кирхгофа осуществляем практически мгновенно, и для электромеханического регулятора это уже свершившийся факт. Поэтому приращения эффективных значений токов в каждой фазе, вызванные влиянием возмущений в соседних фазах мо- (ут быть записаны в виде
Д| «i Д12 +/3i All :
А I --сг2 Ah +# А1з;(1)
Al одЛ12 + #j AI3 ,
где А1,А1,А1з - приращения токов в фазах 1,2,3, вызванные влиянием чужих фаз без учета собственных возмущений;
Ali,Al2,Al3 - полные (реальные) приращения токов дуг в фазах;
а... аз , /3i... Д}, - весовые коэффициенты, показывающие какая часть возмущения присутствует в соседних фазах.
На основании (1) функционалы F(a,/3) для каждой фазы для п значений токов можно записать в виде
Fi(ai,/3i) Ј (aiAlai Д1ц -Alai)2
Р2(«г,#2)§ (csAlii+ftAlsi-Al)2 i 1
Рз(о5.Д)2 (ajAbi-b/feAhi-AlTi)2 i 1
(2)
Из условия минимума этих функционалов находятся выражения весовых коэффициентов см ,..оз ,/3i .../fe , . Условие минимума для первого функционала запишется так
aFi(ai.ffi) r)ai
2 J («1 Alzi +/Ji Alii )Al2i 0
i 1
35
3Fi (ai.fr) dai
2 Ј (ai Al2i+/ iAlii-Al3J)
i 1
(3)
Аналогичные выражения записываются и для остальных двух функционалов Рг(аа,0г)иРз(аз./8з).
Преобразовывая выражения (3), получают
i 1
Ј (aiAl3iJ+ § (/3iAluAI2i)
1i 1
Ј (Al3iAl2i);
i i
5 (aiA-l2,Ali,)-t- § (/3iAll)
(AlJiAlu)(4)
i 1
518231586
С учетом того, что полные приращенияВыражение (10) для определения ty мотока ЛI l| - l)y (ljy - уставки тока дуги в J-й жет быть упрощено, если принять xj rj. фазе), приняв значение тока уставки в фазе Тогда равным математическому ожиданию тока фазыTj, получают5If Vu|j-Ui) /x,.(13)
l di-fi .(5)В этом случае математическая модель
п , s значительно упрощается. Сигнал используется для определения дисперсий
1 / -Г ( -Т -„ (#),(# ),(#) соответствующими
2j(. Hi ИД 121 12 ) - . ID/элементами блока 19. Кооме того сигналы h
м
п | 1м v 21 2 ) . 10/элементами блока 19. Кроме того сигналы Ij
используются для определения коэффици,внтов взаимной корреляции между током j-й
где of - дисперсия тока J-й фазы;15 фазы и токами соседних фаз. в которых не
один из вторых моментов.учитываются собственные возмущения.
Второй момент цп определяется какС учетом (5), (6). (7) выражение (4) преобразуется к виду
/И12 П2 01 02 ,(7)
где П2 - коэффициент корреляции. 20a,d+fr г« стюй оз ог ;
Для определения приращений токов дуг
Л Ij в J-й фазе, которые обусловлены во-з-/ „2 мущениями в соседних фазах, необходимоа1 Г12 1 Pi +pi 01 гз 1 03 o . (14) от полного приращения тока в J-й фазе вычесть приращения, вызванные возмущения- 25Решив систему (14), получают ми в той же фазе без учета влияния соседних Фаз, т.е. - П2
01 02 - 1 - и{,
Д| Д I|M (8)П2
Значение ljM определяется из выражениял Р . гз 1 - Г12 Г2
фазного напряжения с низшей стороны печ-ai1 - П2
ного трансформатора
Аналогичным образом определяются U|j ( If rj + UAJ )2 + (Ij xj )2 (9) 35 ДРУие весовые коэффициенты
где Г, xj - активное и реактивное сопротив- ofг Г23 пение токоподвода j-й фазы. оз1 - Решив уравнение (9) относительно ljM, получают 40
а 01Г1 2 ГГЗ Г23
Р1 7л
1Г(-ПИд1+УиШ+ х и||) /ЯЧ-
/(г 2;х 2)(10) 45 . се)
Выражение (10) является математической моделью одной фазы системы питания+ ДСП. д3 - °2 . Г2 з - гз1 П2 з
Приращение определяется так°S1 -
ои
ljH - Ij.(11)Таким образом для определения весовых коэффициентов on ... оз, ... /fo - исПодставив (11) в (8) и с учетом того, что пользуются статистические характеристики Д I, Ij - Ij, получаюттоков дуг. которые определяются предварительно в период обучения. С целью постоянД Ij (Ij - Ij) (I|M - Ij)ной коррекции этих весовых коэффициентов предусматривается постоянное чеилиредование периода обучения и рабочего пеAlj l)-l|M(12)риода.
м
Исходной информацией для работы выислительного блока определения весовых коэффициентов служат сигналы дисперсии и сигналы об коэффициентах корреляции. Эти сигналы определяются известными устройствами, которые входят в блок 19.
Значения Alj, Alj и Ij служат исходными данными для определения коэффициентов корреляции и дисперсии соответствующими устройствами. Причем эти величины определяются непрерывно, а используются ни только по истечении времени определяемого интервалом стационарности для данной электродуговой печи.
Устройство позволяет обеспечить независимое регулирование перемещения электродов путем исключения из сигналов токов дуг приращения, вызванные возмущениями в соседних фазах. Этим обеспечивается более высокая точность регулирования а за счет этого снижение дисперсии токов дуг и повышение производительности печи.
Формула изобретения Устройство для автоматического регулирования электрического режима трехфазной дуговой электропечи, содержащее в цепи управления каждой фазы датчик эффективного значения тока, блок задания уставки тока, датчик эффективного значения фазного напряжения и датчик эффективного значения напряжения дуги, блок сравнения, первый вход которого соединен с выходом датчика эффективного значения напряжения дуги, а выход - с задатчиком мощности данной фазы, отличающееся
тем, что, с целью повышения надежности в работе путем уменьшения дисперсии токов дуг, выход датчика эффективного значения тока дуги каждый фазы соединен с первыми входами введенных первого и второго сумматоров данной фазы и одним из трех первых входов введенного блока определения весовых коэффициентов, три вторых входа которого соединены с выходами датчиков эффективного значения фазного напряжения фаз, три третьих входа - с выходами датчиков эффективного значения напряжения дуги, второй вход первого сумматора каждой фазы соединен через введенный первый инвертор с выходом блока задания
уставки тока данной фазы, второй и третий входы второго сумматора каждой фазы через введенные соответственно второй и третий инверторы соединены с выходами двух введенных для каждой фазы блоков умножения, первый вход каждого из которых соединен с одним из шести выходов блока определения весовых коэффициентов, а второй вход каждого блока умножения данной фазы соединен с выходом первого сумматора, одной из соседних фаз, выход второго сумматора данной фазы соединен с вторым входом блока сравнения данной фазы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор мощности дуговой многофазной электропечи | 1988 |
|
SU1522433A1 |
| Автоматический регулятор мощности дуговой электропечи | 1984 |
|
SU1197151A1 |
| Регулятор мощности дуговой многофазной электропечи | 1986 |
|
SU1399897A1 |
| Устройство для определения электрических параметров токоподвода и напряжений дуг трехфазной дуговой электропечи | 1981 |
|
SU1086557A1 |
| Регулятор мощности дуговой многофазной электропечи | 1982 |
|
SU1042211A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Автоматический регулятор мощности дуговой сталеплавильной печи для выплавки металлизированных окатышей | 1986 |
|
SU1432809A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО РЕЖИМА ДУГОВОЙ МНОГОФАЗНОЙ ЭЛЕКТРОПЕЧИ | 2002 |
|
RU2238616C2 |
| Автоматизированная система управления рудовосстановительной электропечи | 1986 |
|
SU1401242A1 |
Изобретение относится к электротермии и может быть использовано для независимого регулирования мощности дуг в фазах дуговых электропечей. Сущность изобретения: выделяют сигналам, пропорциональные приращениям токов дуг, вызванных возмущениями в дугах соседних фаз, и формируют сигнал тока дуги в виде разности сигнала тока дуги соответствующей фазы и определенных приращений тохов дуг, вызванных возмущениями в дугах соседних фаз, Устройство содержит в цепи управления каждым электродом датчики тока и напряжения дуги, датчик фазного напряжения, выходы которых соединены с соответствующими входами блока определения весовых коэффициентов. Выходы блока определения весовых коэффициентов соединены с соответствующими входами шести блоков умножения, вторые входы которых попарно соединены с выходами блоков определения приращений токов дуг. Выходы этих блоков умножения соединены с соответствующими входами трех выходных сумматоров, один из входов которых соединен с выходом соответствующего датчика тока дуги. Выходы каждого выходного сумматора соединены с входом блока сравнения своей фазы. 1 ил сл С
К электродам
| Автоматический регулятор мощности дуговой сталеплавильной печи для выплавки металлизированных окатышей | 1986 |
|
SU1432809A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Авторское свидетельство СССР № 1568269, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
