1
Изобретение относится к электротехнике , а .именно к частотно-управляемым электроприводам на основе асинхронных двигателей с коротко--замкнутым ротором и может быть использовано в системах, для которых определяющим являются повышенные энергетические показатели к простота конструкции .
Цель изобретения - повьшение энергетических показателей путем уменьшения потребляемой от сети реактивной мощности.
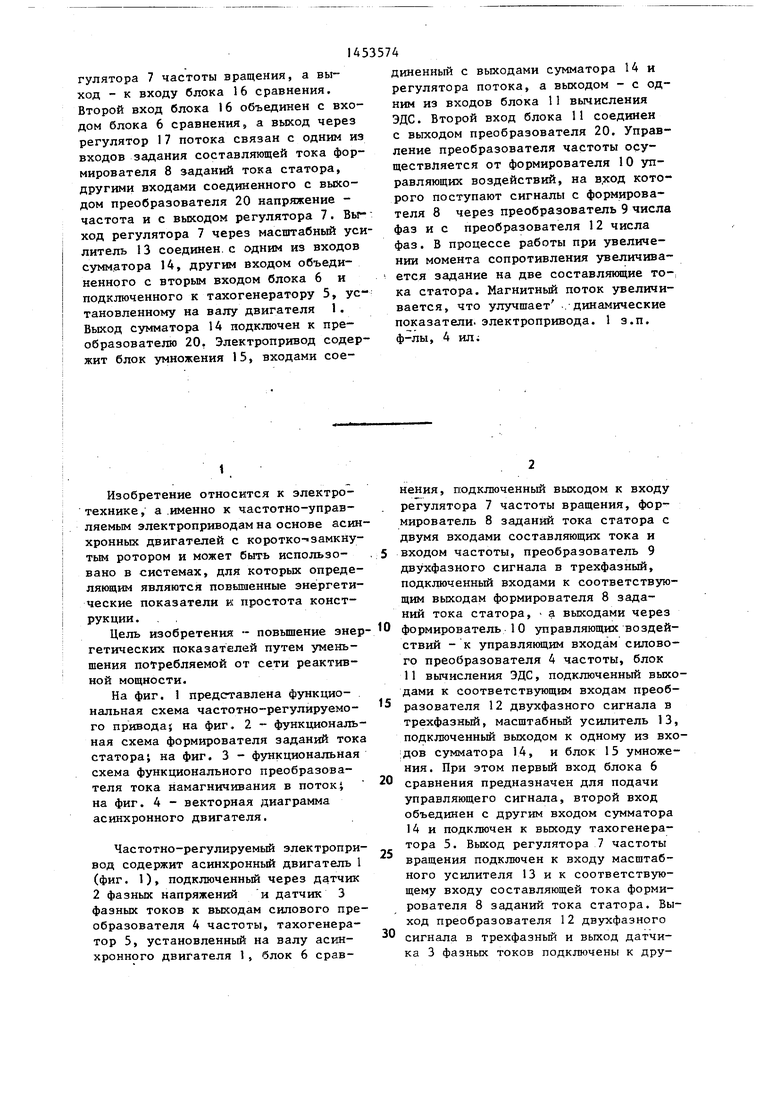
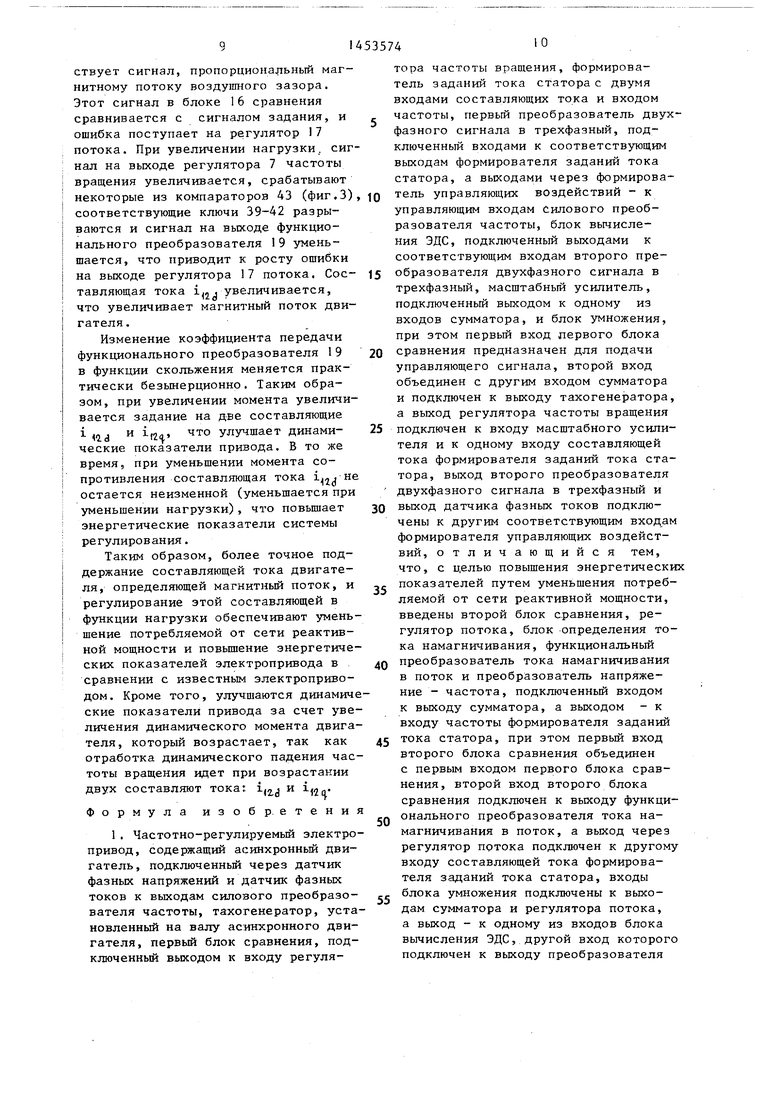
На фиг. 1 представлена функциональная схема частотно-регулируемого привода; на фиг, 2 - функциональная схема формирователя заданий тока статора; на фиг. 3 - функциональная схема функционального преобразователя тока намагничивания в поток , на фиг. 4 - векторная диаграмма асинхронного двигателя.
Частотно-регулируемый электропривод содержит асинхронньй двигатель 1 (фиг. 1), подключенный через датчик 2 фазных напряжений и датчик 3 фазных токов к выходам силового преобразователя 4 частоты, тахогенера- тор 5, установленный на валу асинхронного двигателя 1, блок 6 сравнения, подключенный выходом к входу регулятора 7 частоты вращения, формирователь 8 заданий тока статора с двумя входами составляющих тока и
входом частоты, преобразователь 9 двухфазного сигнала в трехфазный, подключенный входами к соответствующим выходам формирователя 8 заданий тока статора, - а выходами через
формирователь 10 управляющих воздействий - к управляющим входам силового преобразователя 4 частоты, блок 11 вычисления ЭДС, подключенный выходами к соответствующим входам преобразователя 12 двухфазного сигнала в трехфазный, масштабньй усилитель 13, подключенньй выходом к одному из вхо- ;дов сумматора 14, и блок 15 умножения. При этом первый вход блока 6
сравнения предназначен для подачи управляющего сигнала, второй вход объединен с другим входом сумматора 14 и подключен к выходу тахогенера- тора 5. Выход регулятора 7 частоты вращения подключен к входу масштабного усилителя 13 и к соответствующему входу составляющей тока формирователя 8 заданий тока статора. Выход преобразователя 12 двухфазного
сигнала в трехфазный и выход датчика 3 фазных токов подключены к дру
гим соответствующим входам формировтеля 10 управляющих воздействий.
В частотно-регулируемый электропривод введены блок 16 сравнения, ргулятор 17 потока, блок 18 определения тока намагничивания, функционал ньй преобразователь 19 тока намагничивания в поток и преобразователь 2 напряжение - частота, подключенный входом к выходу сумматора 14, а выходом - к входу частоты формирователя 8 заданий тока статора. При этом первый вход блока 16 сравнения объединен с первым входом блока 6 сравнения, второй вход блока 16 сравнения подключен к выходу функционального преобразователя 19, а выход через регулятор I7 потока подключен к соответствующему входу составляющей тока формирователя 8 заданий тока статора. Входы блока 15 умножения подключены к выходам сумматора 14 и регулятора 17 потока, а выход - к одному из входов блока 11 вычисления ЭДС, другой вход которого подключен к вых,оду преобразователя 20 напряжение - частота. Входы блока 18 определения тока намагничивания подключены к выходам датчиков 2 и 3 фазных напряжений и токов, а выход - к одному из входов функционального преобразователя 19, другой вход которого подключен к выходу регулятора 7 частоты вращения.
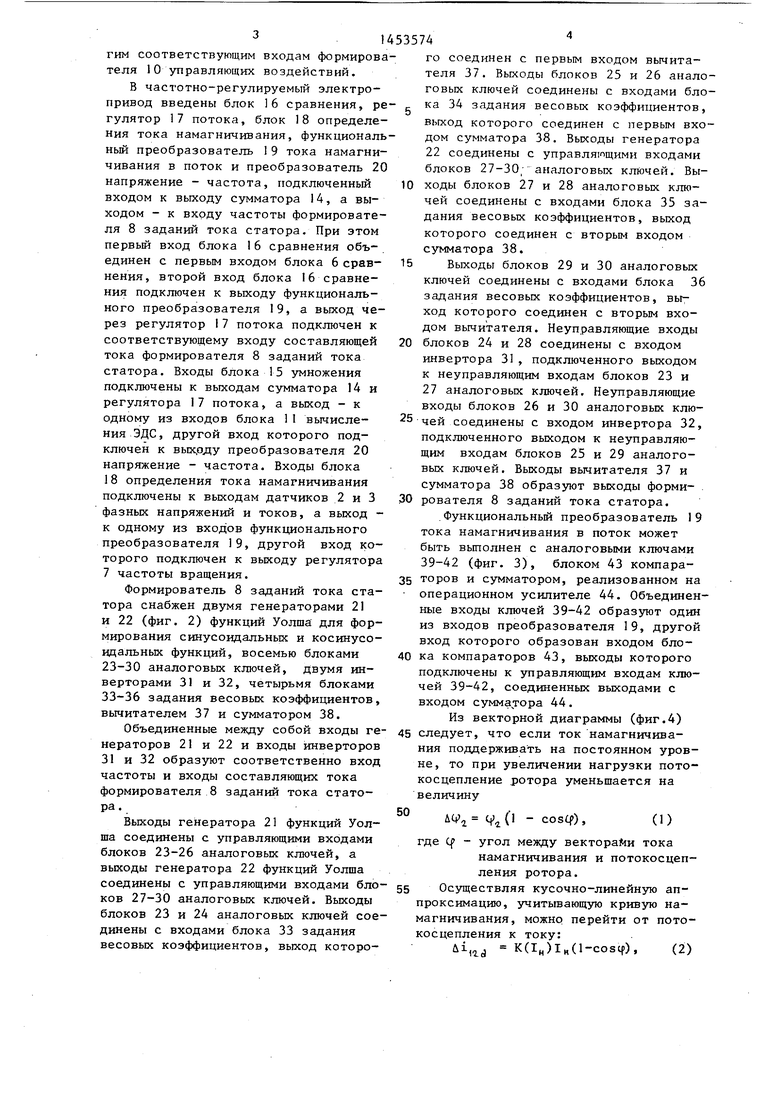
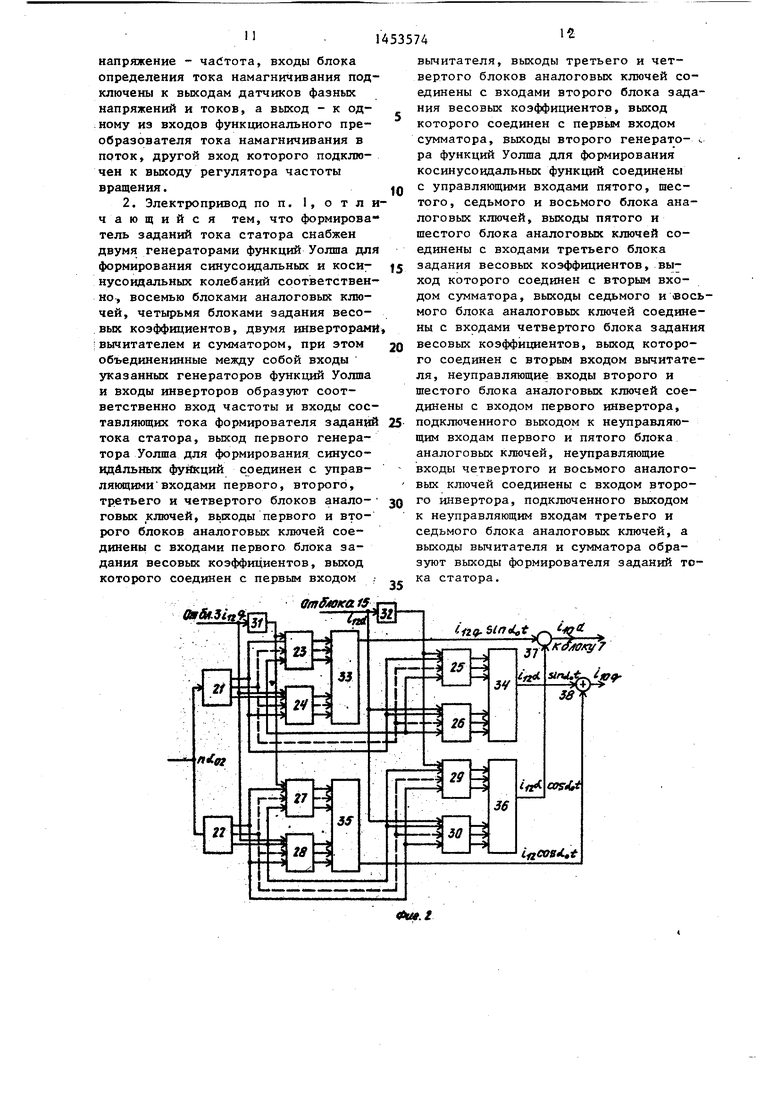
Формирователь 8 заданий тока статора снабжен двумя генераторами 21 и 22 (фиг. 2) функций Уолша для формирования синусоидальных и косинусо- ицальных функций, восемью блоками 23-30 аналоговых ключей. Двумя инверторами 31 и 32, четырьмя блоками 33-36 задания весовых коэффициентов, вычитателем 37 и сумматором 38.
Объединенные между собой входы генераторов 21 и 22 и входы инверторов 31 и 32 образуют соответственно вход частоты и входы составляющих тока формирователя 8 заданий тока статора.
Выходы генератора 21 функций Уолша соединены с управляющими входами блоков 23-26 аналоговых ключей, а выходы генератора 22 функций Уолша
соединены с управляющими входами блоков 27-30 аналоговых ключей. Выходы блоков 23 и 24 аналоговых ключей соединены с входами блока 33 задания весовых коэффициентов, выход которо
0
5
0
го соединен с первым входом вычита- теля 37. Выходы блоков 25 и 26 аналоговых ключей соединены с входами блока 34 задания весовых коэффициентов, выход которого соединен с первым входом сумматора 38. Выходы генератора 22 соединены с управляющими входами блоков 27-30; аналоговых ключей. Выходы блоков 27 и 28 аналоговых ключей соединены с входами блока 35 задания весовых коэффициентов, выход которого соединен с вторым входом сумматора 38.
Выходы блоков 29 и 30 аналоговых ключей соединены с входами блока 36 задания весовых коэффициентов, выход которого соединен с вторым входом вычитателя. Неуправляющие входы блоков 24 и 28 соединены с входом инвертора 31, подключенного выходом к неуправляющим входам блоков 23 и 27 аналоговых ключей. Неуправляющие входы блоков 26 и 30 аналоговых клю- 5 чей соединены с входом инвертора 32, подключенного выходом к неуправляющим входам блоков 25 и 29 аналоговых ключей. Выходы вычитателя 37 и сумматора 38 образуют выходы формирователя 8 заданий тока статора.
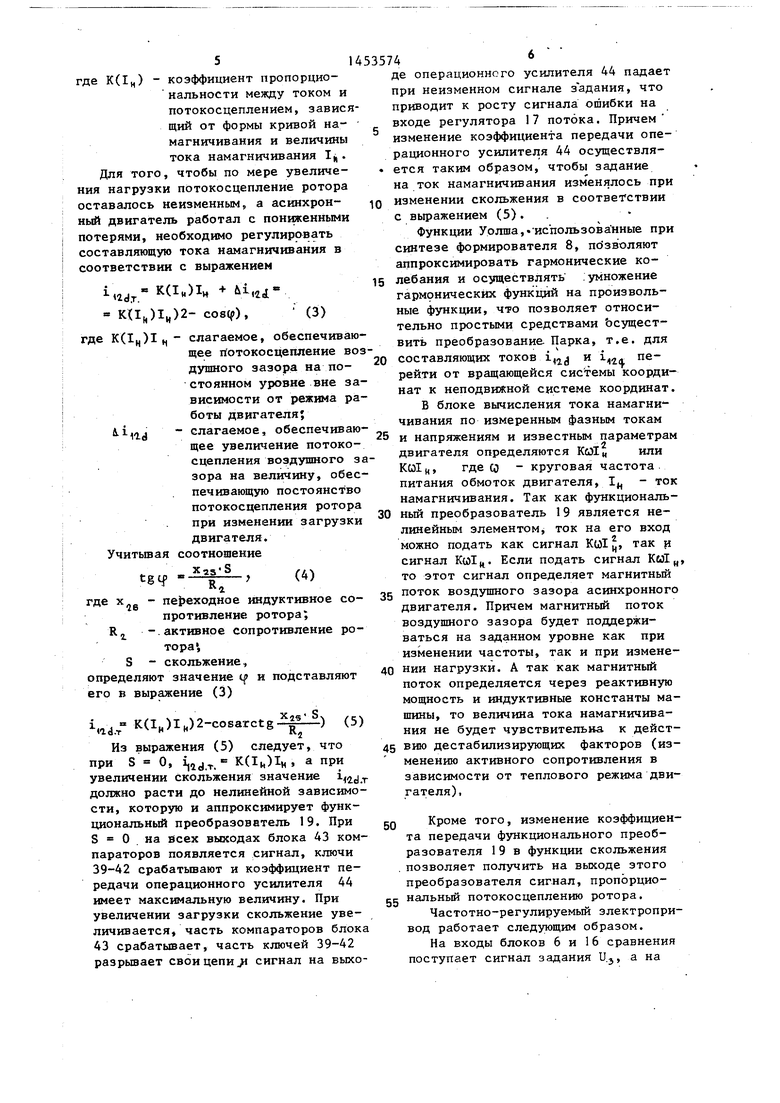
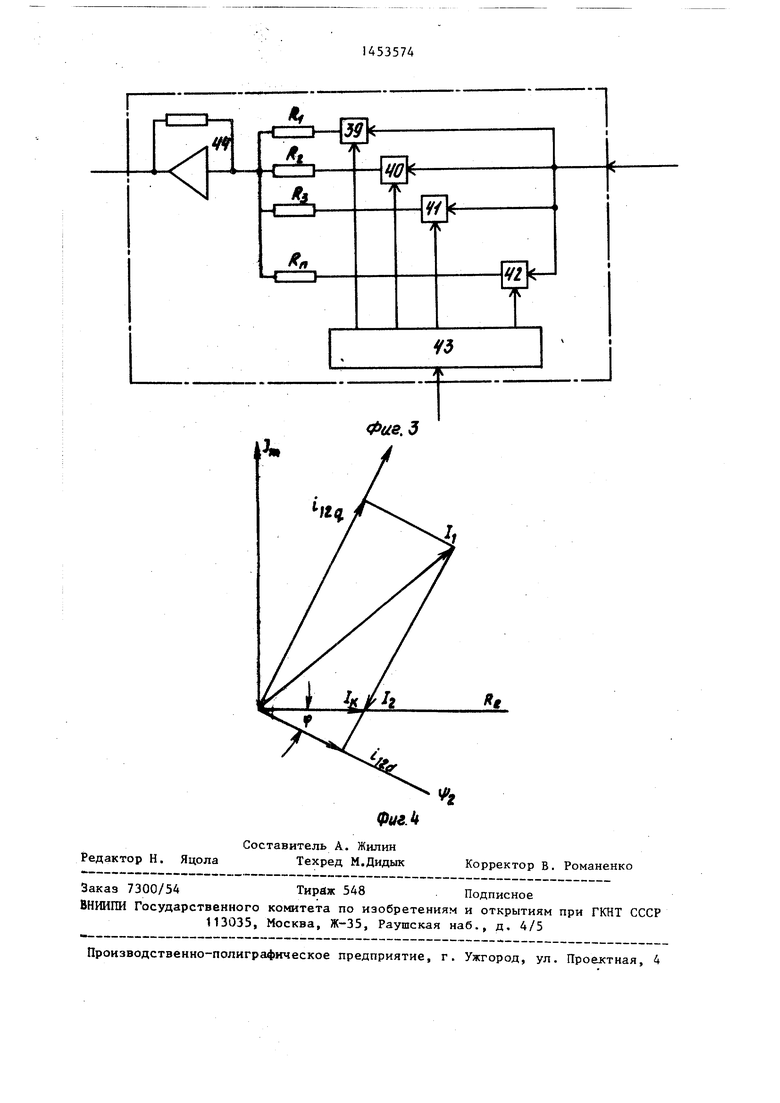
.Функциональньй преобразователь 19 тока намагничивания в поток может быть выполнен с аналоговыми ключами 39-42 (фиг. 3), блоком 43 компараторов и сумматором, реализованном на операционном усилителе 44. Объединенные входы ключей 39-42 образуют один из входов преобразователя 19, другой вход которого образован входом блока компараторов 43, выходы которого подключены к управляющим входам ключей 39-42, соединенных выходами с входом сумма -ора 44.
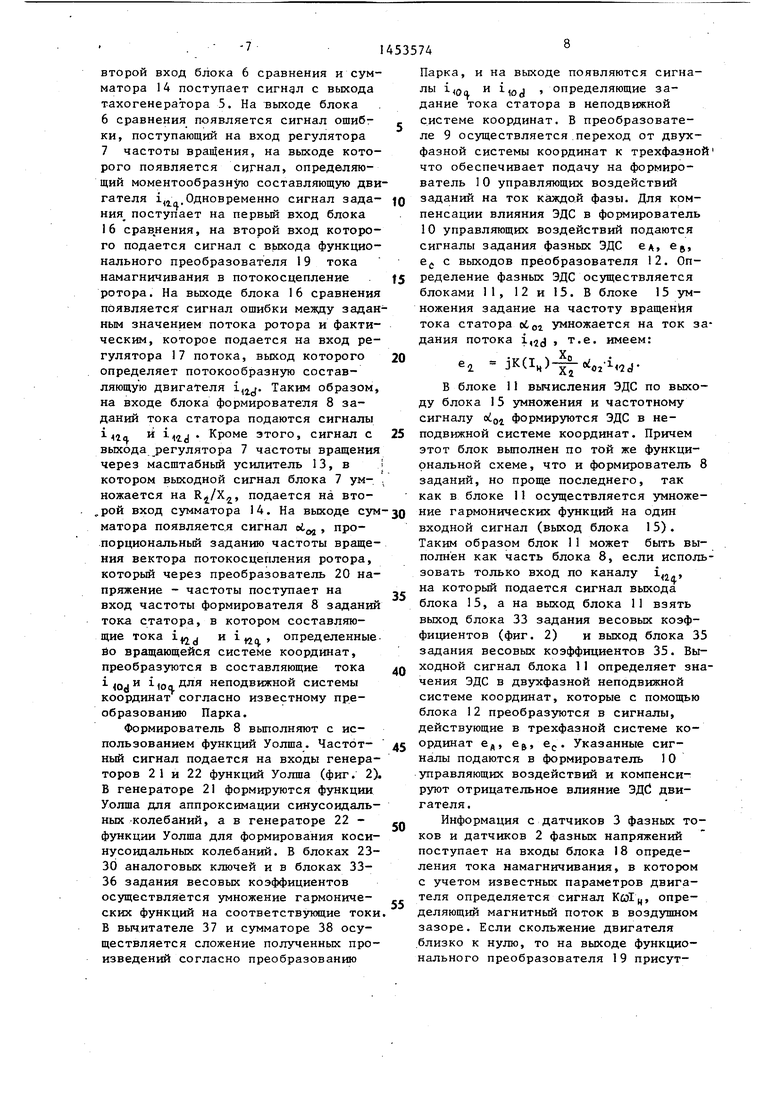
Из векторной диаграммы (фиг.4) следует, что если ток намагничивания поддерживать на постоянном уровне, то при увеличении нагрузки пото- косцепление ротора уменьшается на величину
0
5
0
5
50
С cosq).
(1)
где tp - угол между вектора 1и тока
намагничивания и потокосцеп- ления ротора.
55 Осуществляя кусочно-линейную аппроксимацию, учитывающую кривую намагничивания, можно перейти от пото- косцепления к току:
ui,,, K(I,)lJl-costf), (2)
1453574
де пр пр вх и е н
где К(1„) - коэффициент пропорцио- нальности между током и потокосцеплением, зависящий от формы кривой на- магничивания и величины тока намагничивания Ij. Для того, чтобы по мере увеличения нагрузки потокосцепление ротора оставалось неизменным а асинхронный двигатель работал с пониженными потерями, необходимо регулировать составляющую тока намагничивания в соответствии с выражением
«id.T.
К(1ц)1ц + &i,ii « К(1ц)1ц)2- со8(р), де К(1„)1,
(3)
М
nd
слагаемое, обеспечивающее потокосцепление воздушного зазора на постоянном уровне вне зависимости от режима работы двигателя; слагаемое, обеспечивающее увеличение потоко- сцепления воздушного зазора на величину, обеспечивающую постоянство потокосцепления ротора при изменении загрузки двигателя.
Учитьшая соотношение Xas S .
tgif
R,
(4)
где X - переходное индуктивное сопротивление ротора; Rj -.активное сопротивление ротора ,
S - скольжение,
определяют значение 1 и подставляют его в выражение (3)
K(I..)IJ2-cosaTctg
Xjs- S
-) (5)
d.T
Из выражения (5) следует, что при 8 0, i,ij.T. K(IM)I«. а при увеличении скольжения значение .-r должно расти до нелинейной зависимости, которую и аппроксимирует функциональный преобразователь 19. При S О на йсех выходах блока 43 компараторов появляется сигнал, ключи 39-42 срабатьшают и коэффициент передачи операционного усилителя 44 имеет максимальную величину. При увеличении загрузки скольжение уве- личивается, часть компараторов блока 43 срабатывает, часть ключей 39-42 разрывает своицепи 1 сигнал на выхо
0
5
0
25
де операционного усилителя 44 падает при неизменном сигнале з адания, что приводит к росту сигнала ошибки на входе регулятора 17 потока. Причем изменение коэффициента передачи операционного усилителя 44 осуществляется таким образом, чтобы задание на ток намагничивания изменялось при изменении скольжения в соответствии с вьфажением (5). .
функции Уолша,« использова нные при синтезе формирователя 8, пбзволяют аппроксимировать гармонические колебания и осуществлять .умножение гармонических функций на произвольные функции, что позволяет относительно простыми средствами Ъсущест- вить преобразование Парка, т.е. для составляющих токов i,j и i перейти от вращающейся сис темы координат к неподвижной системе координат. В блоке вычисления тока намагничивания по измеренным фазным токам и напряжениям и известным параметрам двигателя определяются КсоТц или
KOI
н
где со - круговая частота
30
35
питания обмоток двигателя, Ij, - ток намагничивания. Так как функциональный преобразователь 19 является нелинейным элементом, ток на его вход можно подать как сигнал Ки1ц, так р сигнал K.. Если подать сигнал Кы1„, то этот сигнал определяет магнитный поток воздушного зазора асинхронного двигателя. Причем магнитный поток воздушного зазора будет поддерживаться на заданном уровне как при изменении частоты, так и при изменении нагрузки. А так как магнитный поток определяется через реактивную мощность и индуктивные константы машины, то величина тока намагничивания не будет чувствительна, к дейст- 45 ВИЮ дестабилизирующих факторов (изменению активного сопротивления в зависимости от теплового режима двигателя).
40
Кроме того, изменение коэффициента передачи функционального преобразователя 19 в функции скольжения позволяет получить на выходе этого преобразователя сигнал, пропорцио- нальньй потокосцеплению ротора.
Частотно-регулируемый электропривод работает следующим образом.
На входы блоков 6 и 16 сравнения поступает сигнал задания U.j, а на
второй вход блока 6 сравнения и сумматора 14 поступает сигнал с выхода тахогенератора 5. На выходе блока
6сравнения появляется сигнал ошибки, поступающий на вход регулятора
7частоты вращения, на выходе которого появляется сигнал, определяющий моментообразную составляющую двигателя Одновременно сигнал зада- ния поступает на первый вход блока
16 сравнения, на второй вход которого подается сигнал с вькода функционального преобразователя 19 тока намагничивания в потокосцепление ротора. На выходе блока 16 сравнения появляется сигнал ошибки между заданным значением потока ротора и фактическим, которое подается на вход регулятора 17 потока, выход которого определяет потокообразную составляющую двигateля Таким образом, на входе блока формирователя 8 заданий тока статора подаются сигналы i 1„ li ii2.(j Кроме этого, сигнал с выхода регулятора 7 частоты вращения через масштабный усилитель 13, в котором выходной сигнал блока 7 ум- ножается на , подается на вто- „рой вход сумматора 14. На выходе сумматора появляется сигнал , пропорциональный заданию частоты вращения вектора потокосцепления ротора, который через преобразователь 20 напряжение - частоты поступает на вход частоты формирователя 8 заданий тока статора, в котором составляю-
щие тока i
nd
и 1
tt(V
определенныейо вращающейся системе координат, преобразуются в составляющие тока i Q . и i,Q-для неподвижной системы координат согласно известному преобразованию Парка.
Формирователь 8 выполняют с использованием функций Уолша. Частотный сигнал подается на входы генераторов 2 1 и 22 функций Уолша (фиг. 2) В генераторе 21 формируются функции Уолша для аппроксимации синусоидальных колебаний, а в генераторе 22 - функции Уолша для формирования коси- нусоидальных колебаний. В блоках 23- 30 аналоговых ключей и в блоках 33- 36 задания весовых коэффициентов осуществляется умножение гармонических функций на соответствующие токи В вычитателе 37 и сумматоре 38 осуществляется сложение полученных произведений согласно преобразованию
0
5
0
5
0
5
0
5
0
5
Парка, и на выходе появляются сигналы и i,Qj , определяющие задание тока статора в неподвижной системе координат. В преобразователе 9 осуществляется переход от двухфазной системы координат к трехфазной что обеспечивает подачу на формирователь 1 О управляющих воздействий заданий на ток каждо.й фазы. Для компенсации влияния ЭДС в формирователь 10 управляющих воздействий подаются сигналы задания фазных ЭДС ел, е, е с выходов преобразователя 12. Определение фазных ЭДС осуществляется блоками 11, 12 и 15. В блоке 15 умножения задание на частоту вращения тока статора oioi умножается на ток задания потока i,2d т.е. имеем:
е JK(I),-i,,2j.
В блоке 11 вычисления ЭДС по выходу блока 15 умножения и частотному сигналу oioj формируются ЭДС в неподвижной системе координат. Причем этот блок выполнен по той же функциональной схеме, что и формирователь 8 заданий, но проще последнего, так как в блоке 11 осуществляется умножение гармонических функций на один входной сигнал (выход блока 15). Таким образом блок 11 может быть выполнен как часть блока 8, если использовать только вход по каналу ., на который подается сигнал выхода блока 15, а на выход блока 11 взять выход блока 33 задания весовых коэффициентов (фиг. 2) и выход блока 35 задания весовых коэффициентов 35. Выходной сигнал блока 11 определяет значения ЭДС в двухфазной неподвижной системе координат, которые с помощью блока 12 преобразуются в сигналы, действующие в трехфазной системе координат ед, е, е. Указанные сигналы подаются в формирователь 1 О управляющих воздействий и компенсируют отрицательное влияние ЭДС двигателя.
Информация с датчиков 3 фазных токов и датчиков 2 фазных напряжений поступает на входы блока 18 определения тока намагничивания, в котором с учетом известных параметров двигателя определяется сигнал КоТц, определяющий магнитный поток в воздушном зазоре. Если скольжение двигателя .близко к нулю, то на выходе функционального преобразователя 19 присутствует сигнал, пропорциональный магнитному потоку ВОЗДУ1Ш10ГО зазора. Этот сигнал в блоке 16 сравнения сравнивается с сигналом задания, и ошибка поступает на регулятор 17 потока. При увеличении нагрузки, сигнал на выходе регулятора 7 частоты вращения увеличивается, срабатывают некоторые из компараторов 43 (фиг.З) соответствующие ключи 39-42 разрываются и сигнал на выходе функционального преобразователя 19 уменьшается, что приводит к росту ошибки на выходе регулятора 17 потока. Составляющая тока .увеличивается, что увеличивает магнитный поток двигателя.
Изменение коэффициента передачи функционального преобразователя 19 в функции скольжения меняется практически безьшерционно. Таким образом, при увеличении момента увеличивается задание на две составляющие
и 1,
что улучшает динами
lid t2(j, ческие показатели привода. В то же
время, при уменьшении момента сопротивления составляющая тока не остается неизменной (уменьшается при уменьшении нагрузки), что повьш1ает энергетические показатели системы регулирования.
Таким образом, более точное поддержание составляющей тока двигателя, определяющей магнитный поток, и регулирование этой составляющей в функции нагрузки обеспечивают уменьшение потребляемой от сети реактивной мощности и повьппение энергетических показателей электропривода в сравнении с известным электроприводом. Кроме того, улучшаются динамические показатели привода за счет увеличения динамического момента двигателя, который возрастает, так как отработка динамического падения частоты вращения идет при возрастании двух составляют тока: i(2,j и i nФормула изобр. етения
1. Частотно-регулируемый электропривод, содержащий асинхронный двигатель, подключенньй через датчик фазных напряжений и датчик фазных токов к выходам силового преобразо- вателя частоты, тахогенератор, установленный на валу асинхронного двигателя, первый блок сравнения, подключенный выходом к входу регуля0
5
0
5
0
5 дО 45
тора частоты вращения, формирователь заданий тока сТатора с двумя входами составляющих тока и входом частоты, первый преобразователь двухфазного сигнала в трехфазный, подключенный входами к соответствующим выходам формирователя заданий тока статора, а выходами через формирователь управляющих воздействий - к управляющим входам силового преобразователя частоты, блок вычисления ЭДС, подключенный выходами к соответствующим входам второго преобразователя двухфазного сигнала в трехфазный, масштабный усилитель, подключенный выходом к одному из входов сумматора, и блок умножения, при этом первый вход первого блока сравнения предназначен для подачи управляющего сигнала, второй вход объединен с другим входом сумматора и подключен к выходу тахогенератора, а выход регулятора частоты вращения подключен к входу масштабного усилителя и к одному входу составляющей тока формирователя заданий тока статора, выход второго преобразователя двухфазного сигнала в трехфазный и выход датчика фазных токов подключены к другим соответствующим входам формирователя управляющих воздействий, отличающийся тем, что, с целью повышения энергетических показателей путем уменьшения потребляемой от сети реактивной мощности, введены второй блок сравнения, регулятор потока, блок определения тока намагничивания, функциональный преобразователь тока намагничивания в поток и преобразователь напряжение - частота, подключенный входом к выходу сумматора, а выходом - к входу частоты формирователя заданий тока статора, при этом первый вход второго блока сравнения объединен с первым входом первого блока сравнения, второй вход второго блока сравнения подключен к выходу функционального преобразователя тока намагничивания в поток, а выход через регулятор пртока подключен к другому входу составляющей тока формирователя заданий тока статора, входы блока умножения подключены к выходам сумматора и регулятора потока, а выход - к одному из входов блока вычисления ЭДС, другой вход которого подключен к выходу преобразователя
напряжение - чабтота, входы блока определения тока намагничивания подключены к выходам датчиков фазных напряжений и токов, а выход - к од;ному из входов функционального преобразователя тока намагничивания в поток, другой вход которого подключен к выходу регулятора частоты вращения.
2. Электропривод по п. 1, отличающийся тем, что формирователь заданий тока статора снабжен двумя генераторами функций Уолша для формирования синусоидальных и коси- нусоидальных колебаний соответственно, восемью блоками аналоговых ключей, четырьмя блоками задания весовых коэффициентов, двумя инверторами
;вычитателем и сумматором, при этом объединенинные между собой входы указанных генераторов функций Уолша и входы инверторов образуют соответственно вход частоты и входы составляющих тока формирователя заданий тока статора, вькод первого генератора Уолша для формирования синусо- идАльных фуйсций соединен с jmpaB- ляющими входами первого, второго, третьего и четвертого блоков знало- говых ключей, вькоды первого и второго блоков аналоговых ключей соединены с входами первого блока задания весовых коэффициентов, выход которого соединен с первым входом .
вычитателя, выходы третьего и четвертого блоков аналоговых ключей соединены с входами второго блока задания весовых коэффициентов, выход которого соединен с первым входом сумматора, выходы второго генерато- ра функций Уолша для формирования косинусоидальных функций соединены с управляющими входами пятого, шестого, седьмого и восьмого блока аналоговых ключей, выходы пятого и шестого блока аналоговых ключей соединены с входами третьего блока задания весовых коэффициентов, выход которого соединен с вторым входом сумматора, выходы седьмого и восьмого блока аналоговых ключей соединены с входами четвертого блока задания весовых коэффициентов, выход которого соединен с вторым входом вычитателя, неуправляющие входы второго и шестого блока аналоговых ключей соединены с входом первого инвертора, подключенного выходом к неуправляющим входам первого и пятого блока аналоговых ключей, неуправляющие входы четвертого и восьмого аналоговых ключей соединены с входом второго инвертора, подключенного выходом к неуправляющим входам третьего и седьмого блока аналоговых ключей, а вькоды вычитателя и сумматора образуют выходы формирователя заданий тока статора.
Ж4 JE
м
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
Изобретение относится к электротехнике. Целью изобретения является повьшение энергетических показателей путем уменьшения потребляемой от сети реактивной мощности. Частотно-регулируемый электропривод содержит блок 18 определения тока намагничивания, входами подключенный к выходам датчиков 2 и 3 напряжений и токов фаз статорной обмотки асинхронного двигателя 1, через которые двигатель подключен к преобразователю частоты 4. Выход блока 18 соединен с входом преобразователя 19 потока, другой вход которого подключен к выходу ре
УЗ
I
Фие.З
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Эпштейн И.И | |||
| Автоматизированный электропривод переменного тока.-М.: Энергоиздат, 1982, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
