Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах обработки данных.
Цель изобретения - повышение точности и быстродействия преобразователя.
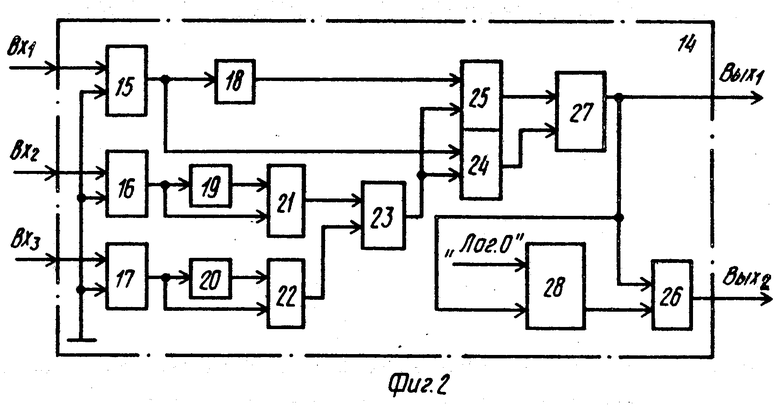
Структурная схема преобразователя угол - код приведена на фиг. 1; структурная схема блока управления - на фиг. 2.
Преобразователь угол - код содержит синусно-косинусный трансформаторный датчик 1, источник 2 напряжения, первый 3 и второй 4 переключатели, первый 5 и второй 6 интеграторы, преобразователь 7 код - напряжение, функциональный преобразователь 8 отношения напряжений в код, вычитающий усилитель 9, компаратор 10, реверсивный счетчик 11, генератор 12 импульсов, элемент И 13 и блок 14 управления.
Блок 14 управления содержит первый 15, второй 16 и третий 17 компараторы, элемент НЕ 18, первый 19 и второй 20 элементы задержки, первый 21 и второй 22 элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, элемент ИЛИ 23, первый 24, второй 25 и третий 26 элементы И, триггер 27 и счетчик-распределитель 28.
Преобразователь угол - код работает следующим образом.
Напряжения с синусно-косинусного трансформаторного датчика 1, пропорциональное sin α и cosα , поступают на второй и третий входы блока 14 управления, на первый вход которого подается переменное опорное напряжение Uоп, непосредственно и через первый 3 и второй 4 переключатели соответственно подключаются к входам первого 5 и второго 6 интеграторов. Первый 5 и второй 6 интеграторы интегрируют входные напряжения, пропорциональные sin α и cos α , в течение половины периода сигнальных напряжений, что обеспечивается блоком 14 управления (первым 15, вторым 16 и третьим 17 компараторами, элементом НЕ 18, первым 19 и вторым 20 элементами задержки, первым 21 и вторым 22 элементами ИСКЛЮЧАЮЩЕЕ ИЛИ, элементом ИЛИ 23, первым 24 и вторым 25 элементами И и триггером 27) и позволяет исключить ошибку от квадратурной составляющей и высших гармоник, кратным двум.
В результате интегрирования на выходе первого 5 и второго 6 интеграторов получаются напряжения
Usinα = S Um·sinωt·sinαdt ~ sinα;
Um·sinωt·sinαdt ~ sinα;
Ucosα = S Um·sinωt·cosαdt ~ cosα, (1) где Um - амплитудное значение входных сигнальных напряжений;
Um·sinωt·cosαdt ~ cosα, (1) где Um - амплитудное значение входных сигнальных напряжений;
α - угол поворота датчика 1;
S1 - значение крутизны синусного интегратора 5 ;
S2 - значение крутизны косинусного интегратора 6.
Напряжение, пропорциональное sin α , с выхода первого 5 интегратора поступает на синусный вход функционального преобразователя 8 отношения напряжений в код, а напряжение, пропорциональное cos α , с выхода второго 6 интегратора поступает на аналоговый вход преобразователя 7 код - напряжение, выход которого соединен с косинусным входом функционального преобразователя 8 отношения напряжений в код, который преобразует напряжения, пропорциональные sin α и cos α , в код угла.
В соответствии с формулами (1) разница между реальными значениями Usin α и Ucos α на выходах первого 5 и второго 6 интеграторов определяется как
ΔU = Ucosα-Usinα = (S2-S1)( Um·sinωt·cosα·dt -
Um·sinωt·cosα·dt - Um·sinωt ×
Um·sinωt ×
× sinα·dt) = ΔS( Um·sinωt·cosα·dt -
Um·sinωt·cosα·dt - Um·sinωt·sinα·dt), (2) где S2-S1= ΔS - разница между крутизной второго 6 (косинусного) и крутизной первого 5 (синусного) интеграторов.
Um·sinωt·sinα·dt), (2) где S2-S1= ΔS - разница между крутизной второго 6 (косинусного) и крутизной первого 5 (синусного) интеграторов.
В течение цикла режима коррекции интеграторов 5 и 6, задаваемого блоком 14 управления (триггером 27, счетчиком-распределителем 28 и третьим 26 элементом И), на входы первого 5 и второго 6 интеграторов через первый 3 и второй 4 переключатели соответственно поступает напряжение от источника 2, что соответствует эталонному углу α = 45о. При этом теоретическое значение
Usinтеор. α =45о=Ucosтеор. α = 45о (3)
а разница между реальными значениями напряжений на выходах первого 5 и второго 6 интеграторов эталонного угла α =45о в соответствии с формулой (2) определяется как
ΔUα = 45°= U -U
-U = ΔS
= ΔS Um·sinωt·
Um·sinωt·  dt. (4)
dt. (4)
Напряжение с выхода первого 5 интегратора, пропорциональное sin α 45o, поступает на синусный вход функционального преобразователя 8 отношения напряжений в код и на первый вход вычитающего усилителя 9, а напряжение с выхода второго 6 интегратора, пропорциональное cos α 45о, поступает через следящую систему, состоящую из преобразователя 7 код - напряжение, компаратора 10, реверсивного счетчика 11, генератора 12 импульсов и элемента И 13, на косинусный вход функционального преобразователя 8 отношения напряжений в код и на второй вход вычитающего усилителя 9.
По переднему фронту каждого импульса (сигнала) с второго выхода блока 14 управления, соответствующего циклу режима коррекции и интеграторов 5 и 6, все разряды реверсивного счетчика 11 устанавливаются в единичное состояние, так как его информационные входы соединены с шиной логической "1" преобразователя и так как его выходы соединены с цифровыми входами преобразователя 7 код - напряжение, последний полностью открыт, т.е. его коэффициент деления равен единице и напряжение на его выходе в первоначальный момент определяется как
Uвых ПКН=Ucos45o Kд(Кд=1)=Ucos45о (5) где Кд - управляемый коэффициент деления преобразователя 7 код - напряжение.
Задавая условие S2 > S1, имеем Ucos45oUsin45o, и в результате на выходе вычитающего усилителя 9 получаем
Ucos45o-Usin45o= Δ U45о , (6) так как на выходе вычитающего усилителя 9 присутствует положительное напряжение Δ U45о, компаратор 10 вырабатывает напряжение, соответствующее уровню логической "1", по которому частота с выхода генератора 12 импульсов через элемент И 13 поступает на счетный вход реверсивного счетчика 11. В силу того, что вход выбора режима "сложение-вычитание" реверсивного счетчика 11 соединен с шиной логического "0" преобразователя, последний работает в режиме вычитания, т.е. его код с каждым тактом частоты генератора 12 импульсов уменьшается, что приводит к уменьшению коэффициента деления преобразователя 7 код - напряжение.
Другими словами для цикла режима коррекции интеграторов правомерно выражение
Usin45o=Ucos45o ˙Kд (7) тогда
Kд =  =
=  . (8)
. (8)
Выражая значение крутизны косинусного интегратора 6 через значение крутизны синусного интегратора 5, а именно S2=S1+ ΔS, формулу (8) можно записать в виде
Kд =  , тогда
, тогда = 1 +
= 1 +  =
= 
Cледовательно, коэффициент деления преобразователя 7 код - напряжение определяется как
Kд = 
Таким образом, коэффициент деления преобразователя 7 код - напряжение уменьшается до тех пор, пока напряжения на входах вычитающего усилителя 9 не сравняются, и остается неизменным на весь дальнейший цикл преобразования до следующего цикла режима коррекции интеграторов. Тогда реальное значение косинусного напряжения на входе функционального преобразователя отношения напряжений в код в течение всего цикла преобразования определяется как
Ucosреал·Kд = (S1+ΔS) Um·sinωt·cosα·dt
Um·sinωt·cosα·dt =
=
= S Um·sinωt·cosα·dt.
Um·sinωt·cosα·dt.
Cледовательно, включение управляемого делителя напряжения, входящего в состав преобразователя код - напряжение, со следящей системой, состоящей из вычитающего усилителя, компаратора, реверсивного счетчика, генератора импульсов и элемента И, в цепь косинусного интегратора позволяет исключить ошибку, вносимую в устройстве-прототипе функциональным преобразователем отношения напряжений в код, а также обеспечить выравнивание крутизны интеграторов за один цикл режима их коррекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1980 |
|
SU1840148A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2005 |
|
RU2282938C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1981 |
|
SU1840281A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478332A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2017063C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1981 |
|
SU1840034A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
Изобретение относится к вычислительной технике и позволяет за счет введения в преобразователь, содержащий синусо-косинусный трансформаторный датчик 1, источник 2 напряжения, первый 3 и второй 4 переключатели, первый 5 и второй 6 интеграторы, преобразователь 7 код - напряжение, функциональный преобразователь 8 отношения напряжений в код, реверсивный счетчик 11 и блок 14 управления, вычитающего усилителя 9, компаратора 10, генератора 12 импульсов и элемента И 13 исключить погрешность, вносимую функциональным преобразователем отношения напряжений в код в процесс (результат) выравнивания крутизны синусного и косинусного интеграторов 5 и 6, и тем самым повысить точность преобразователя, а также осуществлять выравнивание интеграторов за один цикл режима коррекции, тем самым в значительной степени повысить быстродействие режима коррекции интеграторов преобразователя. 1 з.п. ф-лы, 2 ил.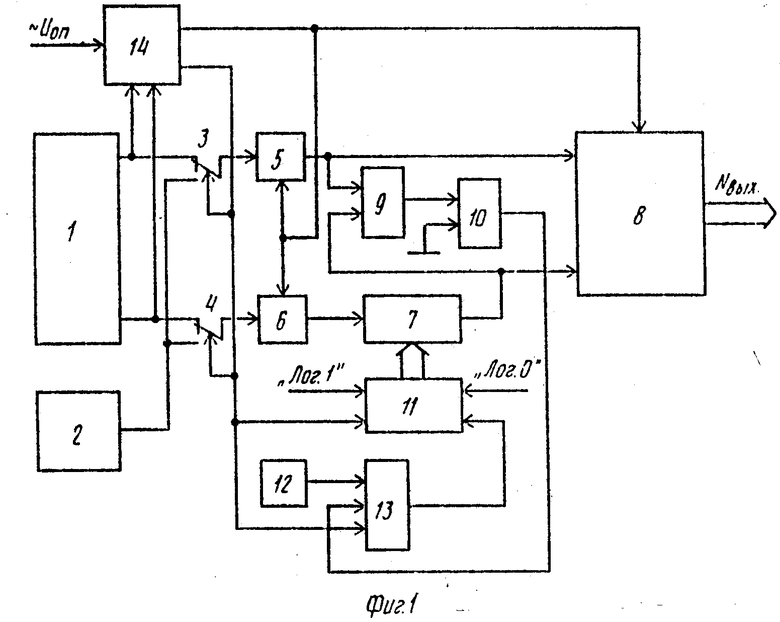
| Преобразователь угол-код | 1973 |
|
SU463128A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
