Изобретение относится к контрольно-измерительной технике, в частности к измерительным системам получения информа- ции о величине и скорости перемещения, и может быть использовано для создания высокоточных систем управления исполнительными механизмами технологического оборудования, в том числе в станках с ЧПУ.
Цель изобретения - повышение точности преобразования измерительных сигналов и расширение диапазона рабочих частот преобразователя.
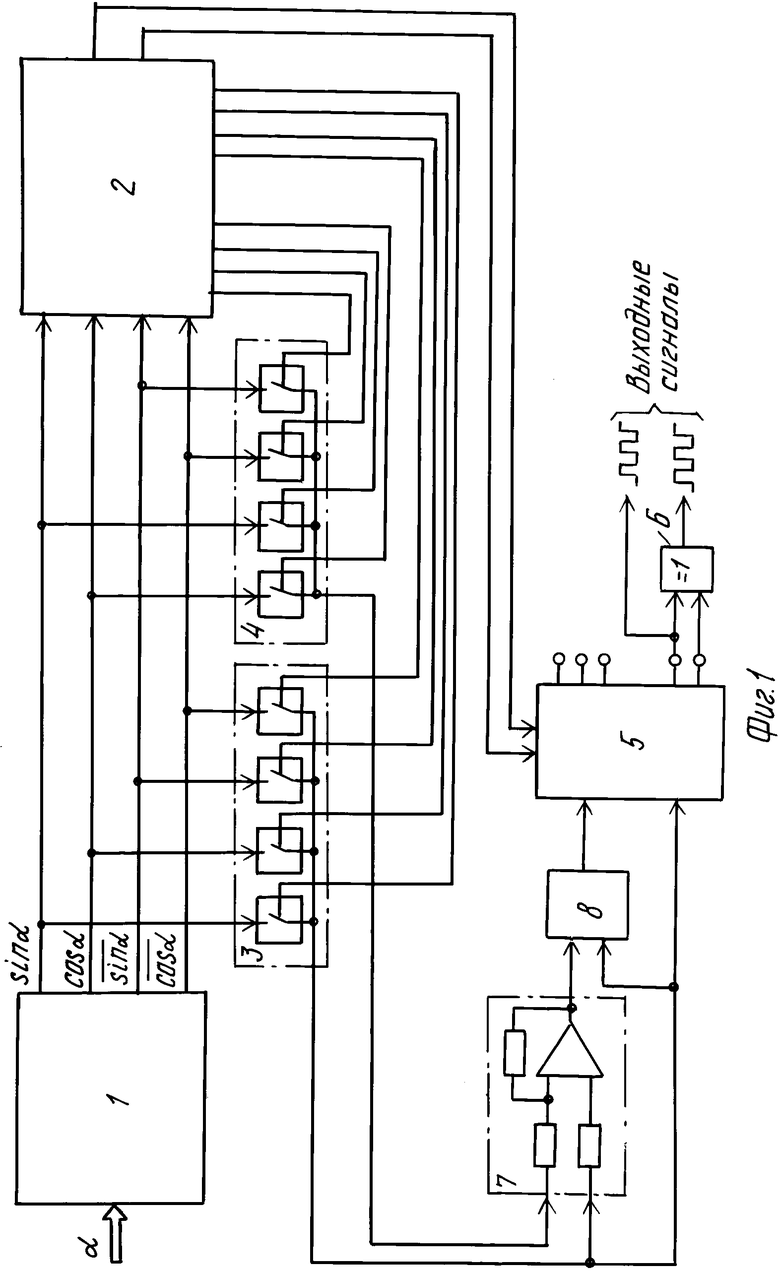
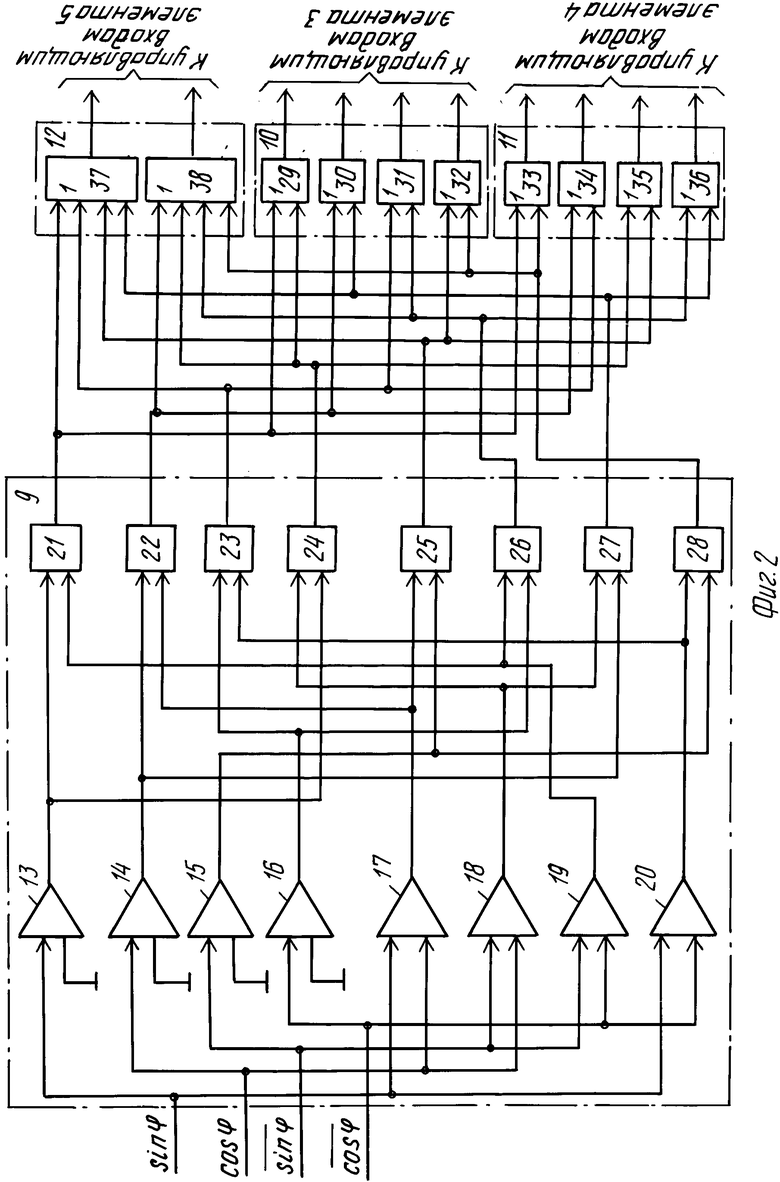
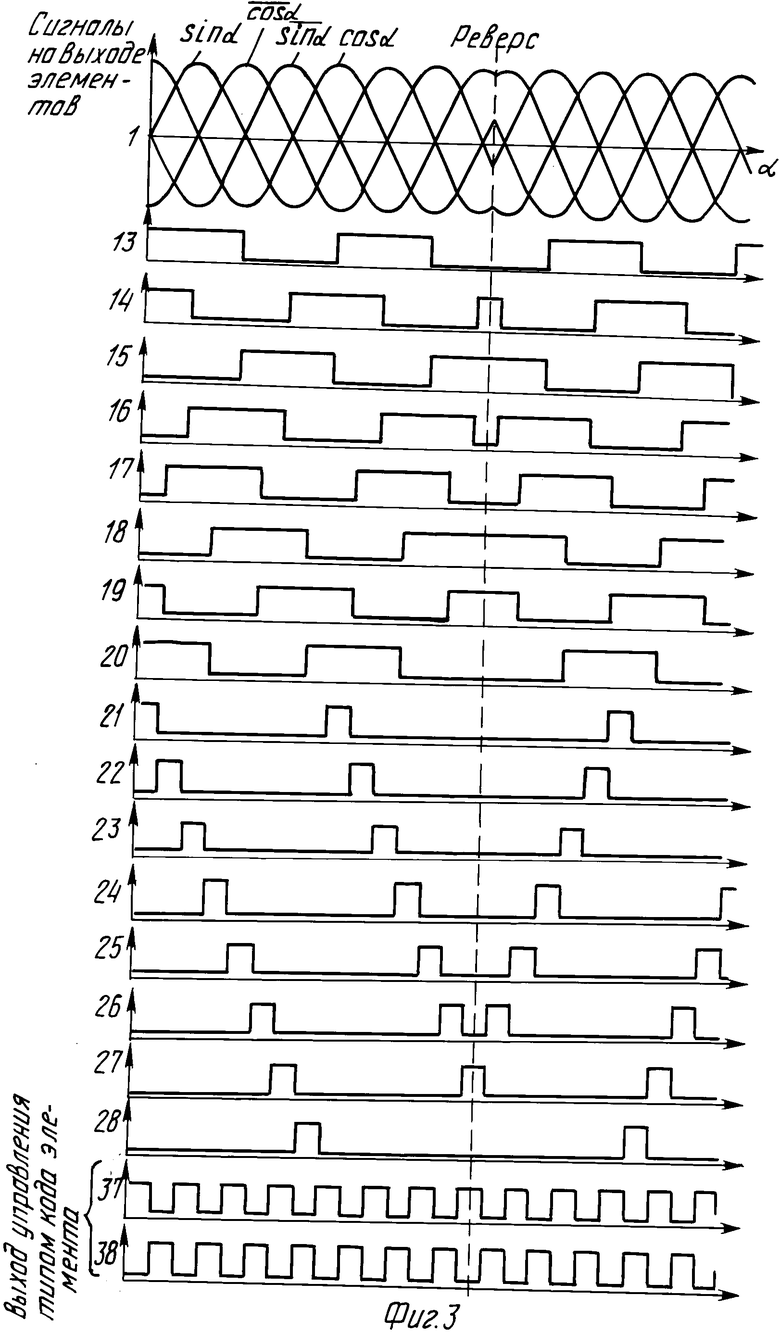
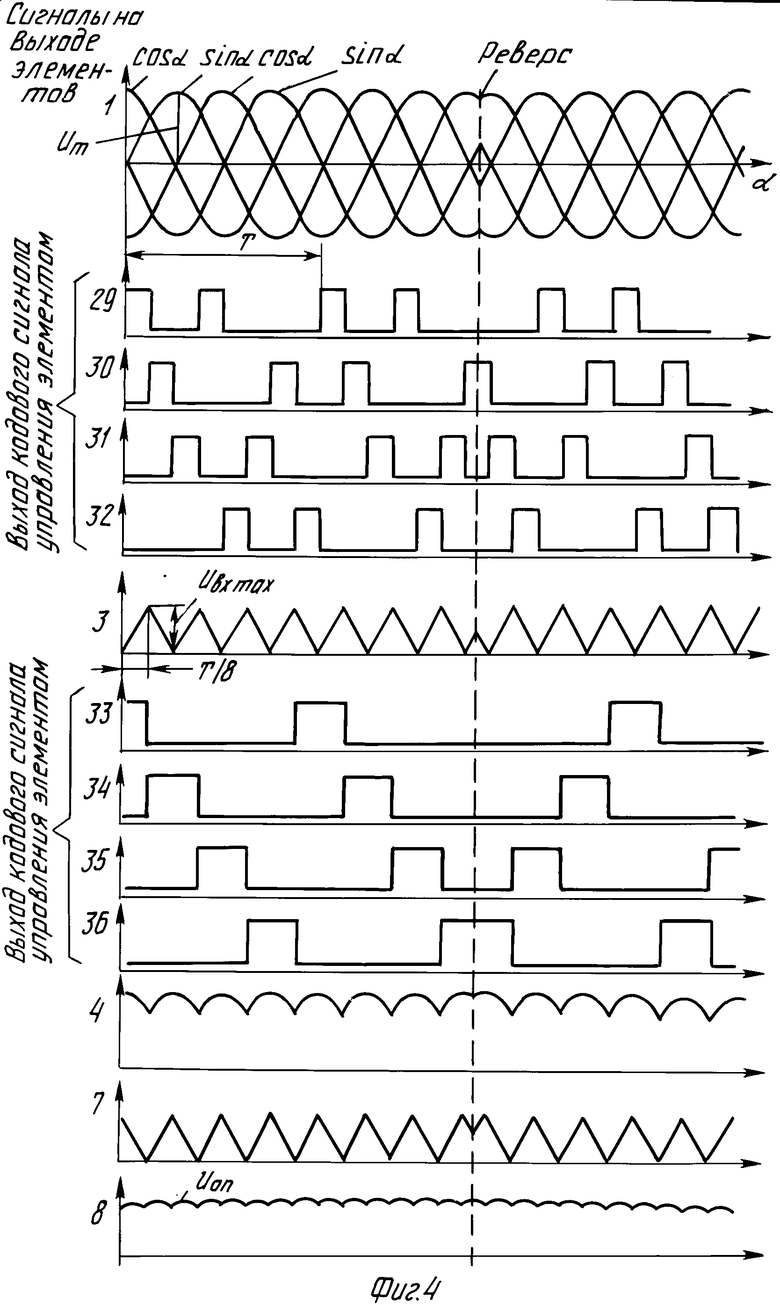
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - функциональная схема блока управления; на фиг. 3 - временные диаграммы входных и выходных сигналов элементов блока управления, обеспечивающих формирование управляющих импульсов; на фиг. 4 - временные диаграммы выходных сигналов элементов устройства, обеспечивающих формирование периодического однополярного сигнала треугольной формы и опорного сигнала.
Устройство преобразования многофазного периодического сигнала содержит измерительный преобразователь 1 с прямым и инверсным выходами ортогональных измерительных сигналов, подключенные к его выходам блок 2 управления с двумя выходами параллельного кодового сигнала и электронный коммутатор 3 с выходом на одно направление и управляющими входами, подключенными к первому выходу блока 2 управления, аналого-цифровой преобразователь (АЦП) 5 со входом измерительного сигнала, подключенным к выходу электронного коммутатора 3, входом опорного сигнала и выходами n-разрядного двоичного кода и формирователь 6 квадратурного сигнала с двумя входами, подключенными к выходам двух младших разрядов АЦП 5. В устройство введены второй электронный коммутатор 4 на одно направление с информационными входами, подключенными к выходам измерительного преобразователя 1, и управляющими входами, фазовращатель 7 с двумя входами, связанными с выходами электронных коммутаторов 3 и 4, и параллельный сумматор 8 сигналов с двумя входами, подключенными к выходам фазовращателя 7 и первого электронного коммутатора 3, и выходом, соединенным со входом опорного сигнала АЦП 5. АЦП 5 выполнен со входом управления типом выходного кода, который подключен ко второму выходу блока управления. Блок 2 управления выполнен с третьим выходом параллельного кодового сигнала, соединенным с управляющими входами второго электронного коммутатора. Выход второго младшего разряда АЦП 5 и выход формирователя 6 квадратурного сигнала образуют выходы устройства. Измерительный преобразователь 1 содержит модулятор светового потока с двумя каналами модуляции, образованными двумя растровыми сопряжениями (индикаторным и измерительным растрами), период изменения светового потока в каждом из которых равен шагу измерительного растра, четыре фотоприемника, сигналы каждого из которых сдвинуты относительно сигналов предыдущего по пространственной фазе на четверть шага измерительного растра и включенные попарно (через один) по балансной (дифференциальной) схеме, два усилителя измерительных сигналов и два инвертора. Выходы усилителей измерительных сигналов и инверторов являются выходами ортогональных сигналов измерительного преобразователя 1. Блок 2 управления содержит селектор 9 октантов со входами, являющимися входами блока управления, две логические схемы 10 и 11 управления коммутаторами 3 и 4 соответственно и логическую схему 12 управления типом выходного кода АЦП 5. Селектор 9 октантов содержит восемь компараторов 13-20 и восемь логических элементов 21-28 на два входа каждый, выполняющих логическую операцию И. Сигнальные входы компараторов 13-16 соединены с выходами синусного и косинусного сигнала измерительного преобразователя 1 и их инверсиями соответственно. Входы опорного сигнала компараторов 13-16 связаны с общей шиной. Сигнальные входы компараторов 17, 20 и 18, 19 соединены соответственно с выходами прямого и инверсного синусных сигналов преобразователя 1. Входы опорного сигнала компараторов 17, 18 и 19, 20 подключены к выходам прямого и инверсного косинусного сигналов измерительного преобразователя 1. Выходы компараторов 13, 14, 15, 16, 17, 18, 19 и 20 соединены соответственно со входами логических элементов 21 и 24, 22 и 27, 25 и 28, 23 и 26, 25 и 22, 24 и 27, 21 и 26, 28 и 23. Выходы логических элементов 21-28 являются выходами селектора 9 октантов и имеют номер октанта 1-8 соответственно.
Логические схемы 10 и 11 управления содержат по четыре логических элемента ИЛИ 29-32, 33-36 соответственно с двумя входами каждая. Входы логических элементов 29, 30, 31 и 32 подключены соответственно к выходам элементов 21 и 24, 22 и 27, 23 и 26, 25 и 28 селектора 9 октантов. Выходы логических элементов 29-32 образуют выход параллельного четырехразрядного кода и являются первым выходом блока 2 управления. Входы логических элементов 33, 34, 35 и 36 подключены соответственно к выходам элементов 21 и 28, 22 и 23, 24 и 25, 26 и 27 селектора 9 октантов. Выходы логических элементов 33-36 являются вторым выходом параллельного четырехразрядного кода блока 2 управления. Логическая схема 12 управления типом выходного кода АЦП 5 содержит два логических элемента ИЛИ 37, 38 с четырьмя входами каждая. Входы логических элементов 37 и 38 подключены к выходам элементов 21, 23, 25, 27 и 22, 24, 26, 28 соответственно. Выходы элементов 37 и 38 являются третьим выходом двухразрядного кода блока 2 управления.
Устройство работает следующим образом.
Измерительный преобразователь 1, содержащий два канала модуляции, преобразует перемещение объекта (входной сигнал) в модулированный растровым сопряжением ток фотоприемников. Ток фотоприемников преобразуется в напряжение усилителями измерительных сигналов. Так как фотоприемники включены по балансной схеме, на вход усилителей поступают два квадратурных сигнала без постоянной составляющей. При перемещении измерительного растра преобразователя в каком-либо направлении изменение напряжения на выходе одного из усилителей отстает по фазе на четверть периода от изменения выходного напряжения второго усилителя , а при перемещении в противоположном направлении выходное напряжение второго усилителя отстает по фазе также на четверть периода. Поэтому знак фазового сдвига между выходными сигналами двух каналов модуляции измерительного преобразователя 1 характе- ризует направление измеряемого перемещения. Основные синусный и косинусный выходные сигналы измерительного преобразователя в качестве переменного аргумента имеют не время, а перемещение объекта измерения, причем одному периоду функций соответствует перемещение модулятора на один шаг измерительного растра. Текущее значение основных сигналов измерительного преобразователя 1 связано с положением измеряемого объекта независимо от того, неподвижен ли он или перемещается.
Информация о взаимном положении элементов растрового модулятора в пределах одного шага измерительного растра заключена в синусном и косинусном выходных сигналах измерительного преобразователя 1. Каждый канал модуляции измерительного преобразователя 1. снабжен инвертором выходного сигнала, на выходе измерительного преобразователя 1 перемещение измеряемого объекта преобразуется в систему четырех ортогональных сигналов.
Деление периода (интерполяция) основных сигналов измерительного преобразователя 1 осуществляется за счет предварительного преобразования системы ортогональных сигналов в однополярный сигнал треугольной формы с последующим делением текущего значения амплитуды преобразованного сигнала на заданное число частей.
Формирование сигнала треугольной формы производится за счет переключения на общий выход квазилинейных участков системы ортогональных сигналов измерительного преобразователя 1 коммутатором 3, управляемым кодовым сигналом блока 2 управления. Для формирования сигналов управления работой коммутатора 3 период сигналов измерительного преобразователя 1 разбивается на октанты блоком 2 управления, на вход которого подаются ортогональные сигналы измерительного преобразователя 1. Учитывая, что напряжения ортогональных измерительных сигналов равны по модулю при углах равных 45, 135, 225 и 315о вследствие идентичности обоих каналов модуляции измерительного преобразователя 1, а поворот фаз синусного и косинусного напряжений происходит на углах 0,180 и 90, 270осоответственно вследствие высокой точности выполнения растрового сопряжения и включения фотопреобразователей по дифференциальной схеме, определение номера октанта периода синусного сигнала производится в разомкнутой схеме преобразования при использовании только сравнивающих устройств (компараторов) и логических элементов. Для определения номера октанта, которому соответствуют сигналы измерительного преобразователя 1 выходные ортогональные сигналы преобразователя преобра- зуются селектором 9 октантов блока 2 управления в импульсные сигналы. Селектор 9 октантов сравнивает на компараторах 13-16 каждое выходное напряжение измерительного преобразователя 1 с нулевым уровнем, а на компараторах 17=20 - попарно между собой. Для формирования выходных сигналов, соответствующих номеру октанта основного синусного сигнала, длительностью равной 1/8 периода основного сигнала, выходные сигналы компараторов 13-20 поступают на входы логических элементов 21-28. Для показанной на фиг. 2 схеме коммутации входов логических элементов 21-28, соответствующие номеру октанта импульсные сигналы, период следования которых равен периоду основного синусного сигнала, вырабатываются на выходе логических элементов 21-28. При перемещении измеряемого объекта в одном направлении сигнал на выходе элемента 21 соответствует первому октанту, на выходе элемента 22 - второму и т.д. При изменении направления перемещения последовательность выходных импульсов определителя 9 октантов изменяется на противоположную. Временные диаграммы, поясняющие работу селектора 9 октантов, представлены на фиг .3. При этом первым принят октант, в котором
sinα≥0, cos α≥0, а sin α< cos α, увеличение номера октанта принято против часовой стрелки.
Селектор 9 октантов управляет работой аналогового коммутатора 3 таким образом, чтобы при любом перемещении в пределах одного шага растра выходной сигнал коммутатора 3 соответствовал сигналу первого квадранта, т.е. sinαпри 0 ≅ α ≅  и сos α при
и сos α при  ≅ α ≅
≅ α ≅  . Для этого логическая схема 10 формирует параллельный код управления с помощью четырех элементов ИЛИ 29, 30, 31 и 32, на вход которых соответственно поступают сигналы, соответствующие 1 и 4, 2 и 7, 3 и 6, 5 и 8 номерам октантов исходного сигнала. Сформированный блоком 2 управления кодовый сигнал с выхода логической схемы 10 поступает на управляющие входы коммутатора 3, на соответствующие информационные входы которого поданы ортогональные сигналы измерительного преобразователя 1. На выходе коммутатора 3 формируется однополярный периодический сигнал треугольной формы, сформированный из линейных участков сигналов измерительного преобразователя 1. Длина участков соответствует одной восьмой части периода исходных ортогональных сигналов. Использование исходных синусного и косинусного сигналов измерительного преобразователя и их инверсий позволяет привести работу устройства к первому квадранту (0 ≅ α ≅
. Для этого логическая схема 10 формирует параллельный код управления с помощью четырех элементов ИЛИ 29, 30, 31 и 32, на вход которых соответственно поступают сигналы, соответствующие 1 и 4, 2 и 7, 3 и 6, 5 и 8 номерам октантов исходного сигнала. Сформированный блоком 2 управления кодовый сигнал с выхода логической схемы 10 поступает на управляющие входы коммутатора 3, на соответствующие информационные входы которого поданы ортогональные сигналы измерительного преобразователя 1. На выходе коммутатора 3 формируется однополярный периодический сигнал треугольной формы, сформированный из линейных участков сигналов измерительного преобразователя 1. Длина участков соответствует одной восьмой части периода исходных ортогональных сигналов. Использование исходных синусного и косинусного сигналов измерительного преобразователя и их инверсий позволяет привести работу устройства к первому квадранту (0 ≅ α ≅  ). При этом дальнейшему преобразованию в устройстве подвергается в первом октанте основной синусный сигнал, а во втором - косинусный сигнал.
). При этом дальнейшему преобразованию в устройстве подвергается в первом октанте основной синусный сигнал, а во втором - косинусный сигнал.
Сформированный однополярный линейнотреугольный сигнал преобразуется в цифровой код с помощью АЦП 5, в котором происходит квантование входного сигнала на конечное число (2n-1) дискретных уровней. При измерении текущее значение аналоговой величины (sinα или cosα ) представляется рядом дискретных значений, каждое из которых преобразуется в код. Для увеличения быстродействия в устройстве применен n-разрядный АЦП параллельного действия, основанный на одновременном сравнении входного сигнала с 2n-1 эталонами и кодировании результатов этого сравнения. В АЦП 2n-1 опорных напряжений формируются с помощью резистивного делителя. Каждое из опорных напряжений подается вместе с сигнальным напряжением на соответствующий компаратор. Срабатывают лишь те компараторы, у которых Uвx > Uоп. Результат сравнения через фиксирующие триггеры подаются на кодопреобразователь, преобразующий его в цифровой двоичный код, при этом в зависимости от команды на входе управления типом выходного кода АЦП результат преобразования может быть представлен в виде прямого или обратного двоичного кода.
Преобразованное дискретное текущее значение сигнала линейно-треугольной формы, представленное в виде параллельного двоичного кода, используется для формирования двух последовательностей выходных импульсных сигналов, сдвинутых между собой по фазе на четверть периода. При этом в качестве основной последовательности используется сигнал с выхода второго младшего разряда АЦП 5, а сигнал, находящийся к нему в квадратуре, формируется элементом ИСКЛЮЧАЮЩЕЕ ИЛИ 6, на входы которого подаются сигналы с выходов двух младших разрядов АЦП 5. Учитывая, что на вход АЦП 5 подается сигнал линейнотреугольной формы (в четных октантах -cosα, в нечетных -sinα), при переходе границы октанта крутизна этого сигнала изменяет знак. При непрерывном перемещении измеряемого объекта в одном направлении для исключения изменения фазы выходных сигналов устройства при переходе границы октантов производится изменение кода АЦП 5 с прямого (в нечетных октантах) на обратный (в четных октантах) за счет подачи управляющей команды с блока 2 управления на вход управления типом выходного кода АЦП 5. Эта команда формируется двумя собирательными схемами ИЛИ 37 и 38, на входы которых соответственно поступают сигналы с выходов элементов 21, 23, 25, 27 и 22, 24, 26, 28, формирующих нечетные и четные номера октантов. При перемещении в одном направлении в пределах нечетных октантов сигнал на выходе второго младшего разряда отстает по фазе на четверть периода от изменения сигнала на выходе формирователя 6, а при перемещении в противоположном направлении - опережает сигнал на выходе формирователя 6 также на четверть периода. Поэтому сдвиг фаз между квадратурными выходными сигналами характеризует направление перемещения. Учитывая, что разрешающая способность АЦП равна Uоп 2n-1, при подаче на его вход линейного сигнала, имеющего крутизну, равную  (где Т - период выходных сигналов измерительного преобразователя 1), частота переключения второго младшего разряда АЦП соответствует
(где Т - период выходных сигналов измерительного преобразователя 1), частота переключения второго младшего разряда АЦП соответствует · 2 ·
· 2 ·  =
=  ·
·  ..
..
Таким образом, период Т исходного сигнала делится на  ·
·  частей. Точность деления периода зависит от соотношения Uon/Uвx, при этом необходимо учитывать, что восстановление промежуточных значений частотного сигнала осуществляется АЦП по значению функции Uвx=Um sinα (Uвx=Um cosα), а не по значению аргумента.
частей. Точность деления периода зависит от соотношения Uon/Uвx, при этом необходимо учитывать, что восстановление промежуточных значений частотного сигнала осуществляется АЦП по значению функции Uвx=Um sinα (Uвx=Um cosα), а не по значению аргумента.
Достаточную точность приближения преобразования к линейному на АЦП можно обеспечить, если воспроизвести опорное напряжение в компенсационной цепи АЦП по зависимости.
Uоп=U sinα+cos
sinα+cos +
+  при 0 ≅ α ≅
при 0 ≅ α ≅  ; (1)
; (1)
Uоп=U cosα+sin
cosα+sin -
-  при
при  ≅ α ≅
≅ α ≅  . (2)
. (2)
При этом нахождение величины угла по значению синусного (косинусного) сигнала построено на основе реализации приближенной зависимости:
α =  =
=  для 0 ≅ α ≅
для 0 ≅ α ≅  ; (3)
; (3)
α =  =
=  для
для  ≅ α ≅
≅ α ≅  .. (4) В этом случае методическая ошибка деления периода по значению функции не превосходит 30 угл.мин шага растра.
.. (4) В этом случае методическая ошибка деления периода по значению функции не превосходит 30 угл.мин шага растра.
В соответствии с соотношениями (1) и (2) опорное напряжение должно представлять сумму двух сигналов - измеряемого сигнала и дополнительного сигнала, имеющего сдвиг по фазе относительно измеряемого сигнала на 45о.
Для формирования дополнительного синусного (косинусного) сигнала используется метод суммирования двух ортогональных гармонических сигналов согласно соотношения asin α+bcosα=A sin( α+ϕо) (5), где A и ϕо=arctg b/a. При этом сдвиг фазы ϕоопределяется значениями и знаками весовых коэффициентов а и b.
и ϕо=arctg b/a. При этом сдвиг фазы ϕоопределяется значениями и знаками весовых коэффициентов а и b.
При ϕо=45о а=b=1 и A =  , а
, а
при ϕо=-45о а
а  =
=  -b
-b =1.
=1.
Использование исходных ортогональных сигналов измерительного преобразователя 1 позволяет в любой момент времени получить прямые и обратные фазы напряжений измерительного преобразователя для формирования дополнительного сигнала и получить опорное напряжение для любого октанта, т.е. в пределах всего диапазона изменения угла, и привести работу устройства к первому квадранту.
Формирование опорного напряжения в компенсационной цепи АЦП 5 производится следующим образом.
Селектор 9 октантов управляет работой аналогового коммутатора 4 таким образом, чтобы при любом перемещении растра в пределах одного шага выходной сигнал коммутатора 4 соответствовал сигналу первого квадранта, т.е. cosαпри 0 ≅ α ≅  и sin α при
и sin α при  ≅ α ≅
≅ α ≅  . Логическая схема 11 для этого формирует параллельный код управления с помощью четырех элементов ИЛИ 33, 34, 35 и 36, на входы которых соответственно поступают сигналы 1 и 8, 2 и 3, 4 и 5, 6 и 7 номеров октантов исходного сигнала.
. Логическая схема 11 для этого формирует параллельный код управления с помощью четырех элементов ИЛИ 33, 34, 35 и 36, на входы которых соответственно поступают сигналы 1 и 8, 2 и 3, 4 и 5, 6 и 7 номеров октантов исходного сигнала.
Сформированный блоком 2 управления кодовый сигнал с выхода логической схемы 11 поступает на управляющие входы коммутатора 4, на соответствующие информационные входы которого поданы ортогональные сигналы измерительного преобразователя 1. На выходе коммутатора 4 формируется однополярный периодический сигнал, представляющий собой части косинусного и синусного сигналов, аналогичных в каждом квадранте по форме сигналу первого квадранта, т. е. cos α при 0 ≅ α ≅  и sinα при
и sinα при  ≅ α ≅
≅ α ≅  . Таким образом, использование четырех ортогональных сигналов измерительного преобразователя позволяет и при формировании опорного напряжения привести работу устройства к первому квадранту.
. Таким образом, использование четырех ортогональных сигналов измерительного преобразователя позволяет и при формировании опорного напряжения привести работу устройства к первому квадранту.
Сформированный однополярный периодический сигнал с выхода коммутатора 4 и однополярный периодический сигнал линейнотреугольной формы с выхода компаратора 3 подаются на входы фазовращателя 7, выполненного на операционном усилителе, выполняющего операцию параллельного суммирования и имеющего коэффициент передачи равный 1/ . Фазовращатель 7 в соответствии с соотношением (5) формирует сигнал, каждый участок которого в заданном октанте сдвинут по фазе на 45о относительно соответствующего участка основного исходного сигнала измерительного преобразователя 1, при этом сигнал на выходе фазовращателя аналогичен по форме периодическому сигналу треугольной формы, но сдвинут относительно его на половину периода.
. Фазовращатель 7 в соответствии с соотношением (5) формирует сигнал, каждый участок которого в заданном октанте сдвинут по фазе на 45о относительно соответствующего участка основного исходного сигнала измерительного преобразователя 1, при этом сигнал на выходе фазовращателя аналогичен по форме периодическому сигналу треугольной формы, но сдвинут относительно его на половину периода.
Преобразованный сигнал с выхода фазовращателя 7 поступает на первый вход сумматора 8, на второй вход которого подается сигнал с выхода коммутатора 3. Сигнал, полученный на выходе сумматора 8, определяемый соотношениями (1) и (2), используется в качестве опорного напряжения и подается в компенсационную цепь АЦП 5.
Предлагаемый интерполятор является разомкнутой системой измерения, которая решает уравнения (3) и (4), где линейный АЦП формирует код, равный отношению текущих значений сигналов, поступающих на измерительный и опорные входы АЦП, т.е. выходной сигнал АЦП, пропорциональный углу поворота модулятора, практически не зависит ни от частоты, ни от амплитуды сигналов измерительного преобразователя 1, а время преобразования определяется только скоростью срабатывания пороговых элементов устройства.
К преимуществам изобретения относится и возможность его реализации на стандартной элементной базе, что ведет к упрощению устройства и повышению технологичности его изготовления в виде набора универсальных интегральных схем.
Изобретение позволяет получить на одном базовом образце унифицированный ряд устройств с различным коэффициентом интерполяции за счет переключения выходов АЦП с требуемой разрешающей способностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1993 |
|
RU2108663C1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1231610A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2020752C1 |
| Многоканальный преобразователь угла поворота вала в код | 1987 |
|
SU1462478A2 |
| Цифровой фазометр | 1983 |
|
SU1092427A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
| Цифровой фазометр | 1988 |
|
SU1538145A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТР - КОД | 2000 |
|
RU2193794C2 |
Изобретение относится к измерительной технике. Повышение точности интерполирования измерительных сигналов и расширение диапазона рабочих частот преобразователя достигаются за счет формирования опорного сигнала для компенсационной цепи АЦП из сигналов измерительного преобразователя. Устройство содержит измерительный преобразователь, блок управления, электронные коммутаторы измерительных сигналов, аналого - цифровой преобразователь (АЦП), формирователь квадратурного сигнала, фазовращатель с двумя входами, связанными с выходами электронных коммутаторов, и параллельный сумматор, входы которого соединены с выходами фазовращателя и первого электронного коммутатора, а выход - со входом опорного сигнала АЦП. АЦП снабжен схемой преобразования выходного кода, управляемой дополнительным выходом блока управления. Выполнение устройства интерполирования сигналов по разомкнутой схеме измерения с использованием АЦП в отношении двух сигналов, каждый из которых сформирован из соответствующих сигналов измерительного преобразователя, позволяет выполнить преобразование с высоким быстродействием и получить выходные сигналы, практически не зависящие от частоты и амплитуды сигналов измерительного преобразователя. 4 ил.
УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА, содержащее измерительный преобразователь, подключенные к его выходам блок управления с двумя выходами параллельного кодового сигнала и первый электронный коммутатор с выходом на одно направление и управляющими входами, подключенными к первому выходу блока управления, аналого-цифровой преобразователь с входом измерительного сигнала, подключенным к выходу электронного коммутатора, входом опорного сигнала и выходами n-разрядного двоичного кода и формирователь квадратурного сигнала с двумя входами, подключенными к выходам двух младших разрядов аналого-цифрового преобразователя, отличающееся тем, что, с целью повышения точности преобразования измерительных сигналов и расширения рабочих частот преобразователя, в него введены второй электронный коммутатор на одно направление с информационными входами, подключенными к выходам измерительного преобразователя, и управляющими входами, фазовращатель с двумя входами, связанными с выходами электронных коммутаторов, и параллельный сумматор сигналов с двумя входами, подключенными к выходам фазовращателя и первого электронного коммутатора соответственно, и выходом, соединенным с входом опорного сигнала аналого-цифрового преобразователя, который выполнен с входом управления типом выходного кода, подключенным к второму выходу блока управления, а блок управления выполнен с третьим выходом параллельного кодового сигнала, соединенным с управляющими входами второго электронного коммутатора, выход второго младшего разряда аналого-цифрового преобразователя и выход формирователя квадратурного сигнала являются выходами устройства.
| Устройство для измерения перемещения объекта | 1990 |
|
SU1779923A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
