Изобретение относится к контрольно- измерительной технике, в частности к оптическим датчикам перемещений.
Цель изобретения - повышение технологичности и расширение функциональных возможностей датчика.
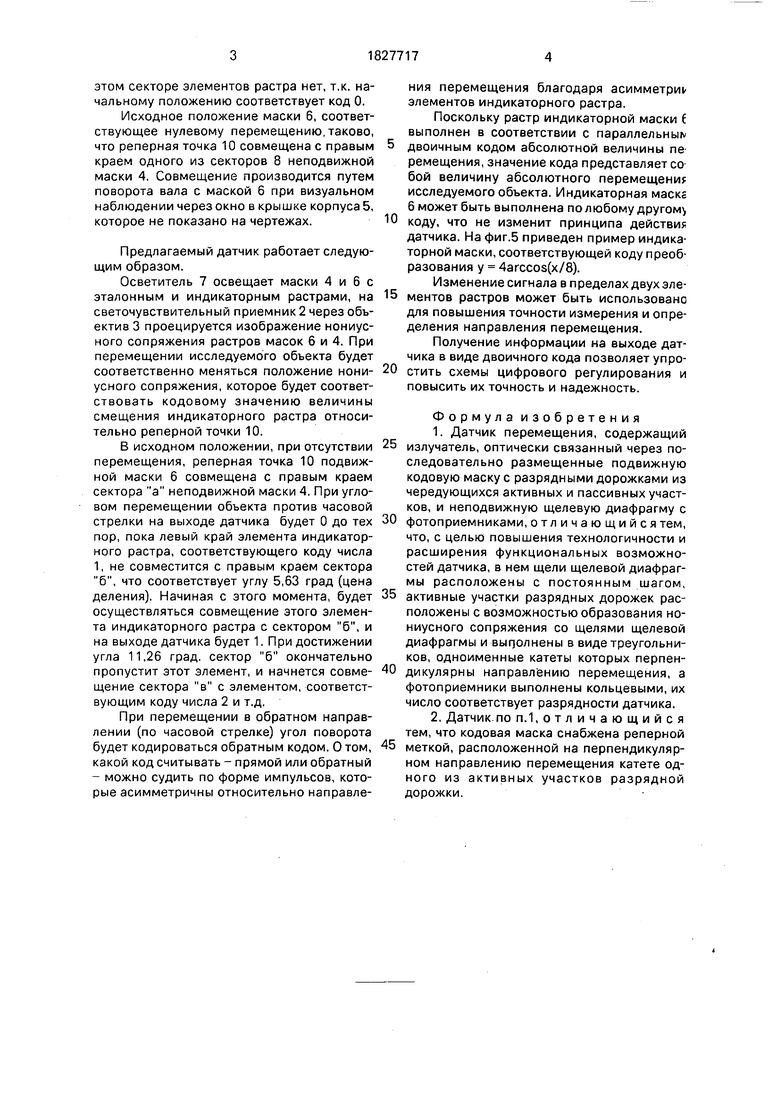
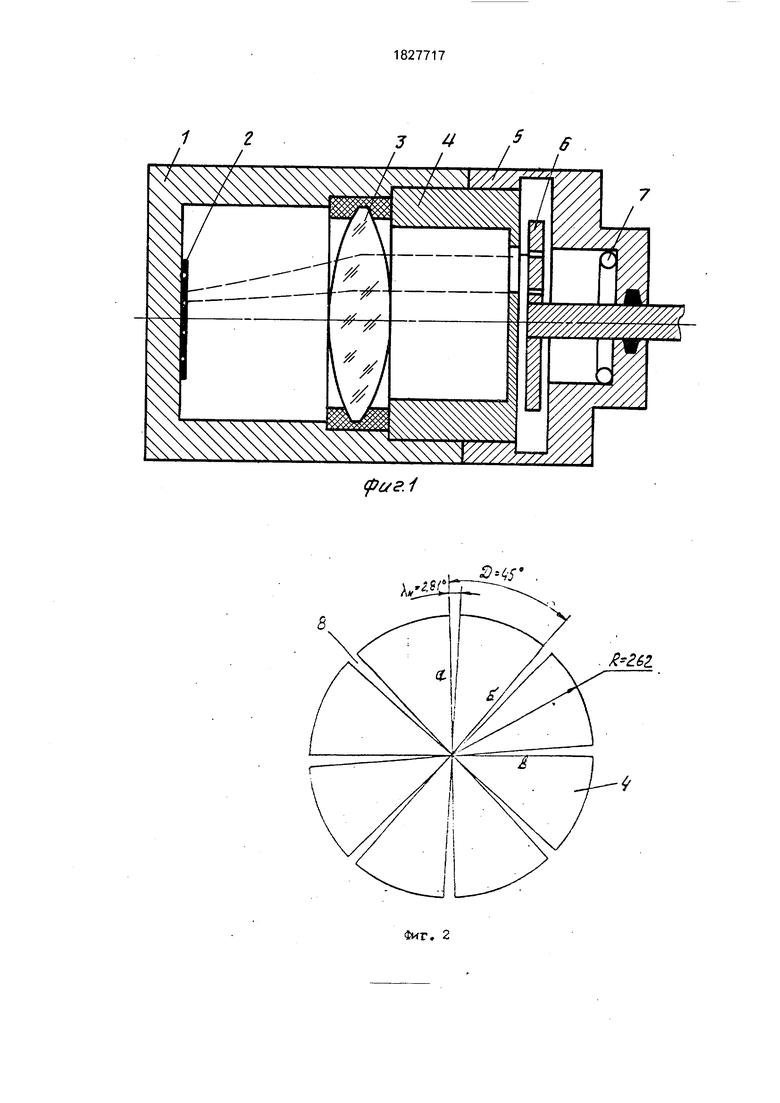
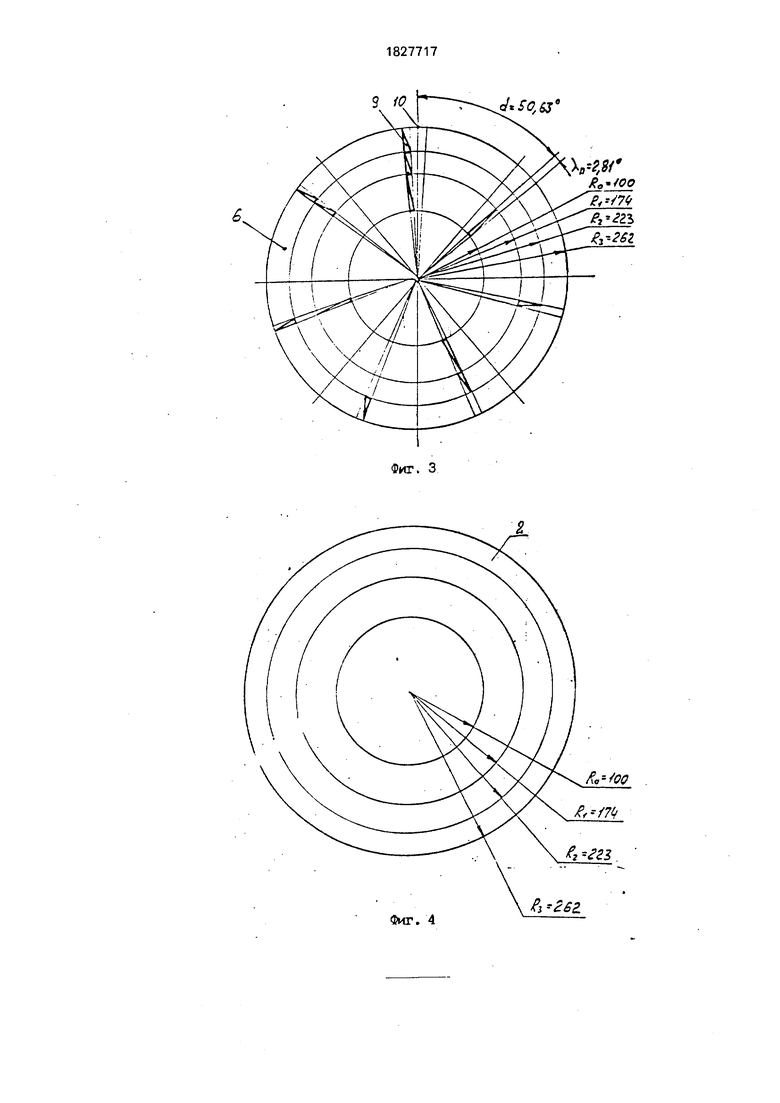
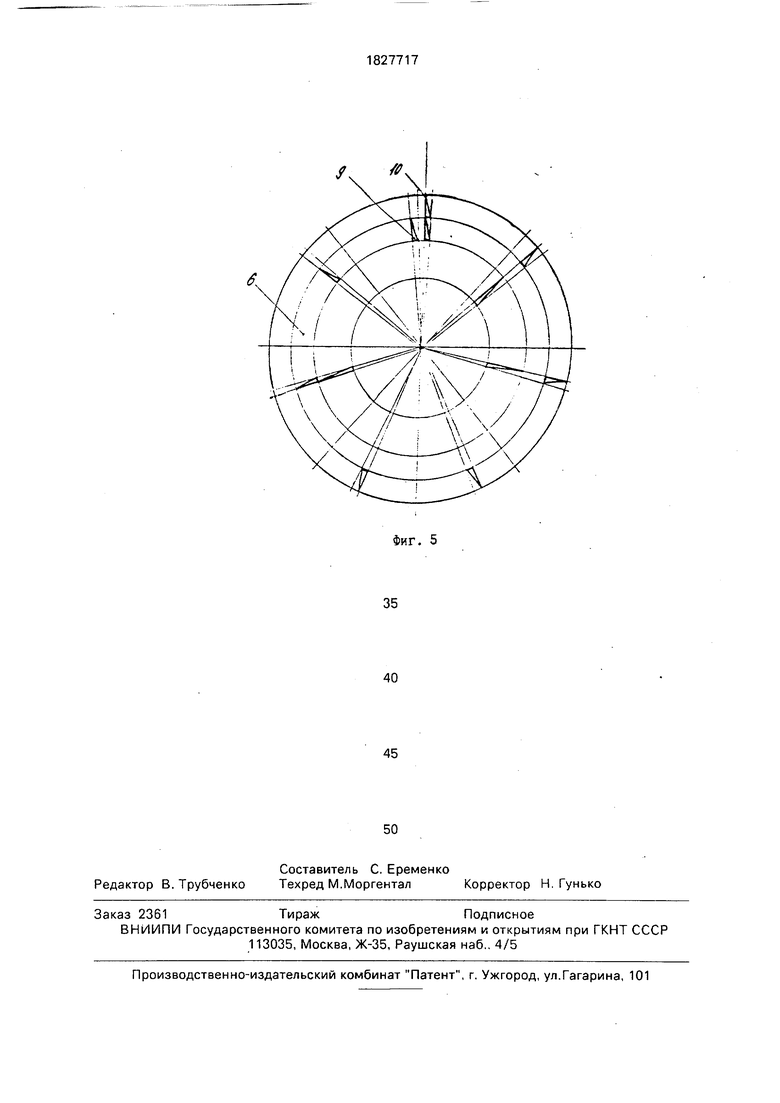
На фиг.1 изображен предлагаемый датчик перемещений в разрезе по продольной оси (приведен трехразрядный вариант); на фиг.2 - маска с эталонным растром; на фиг.З - маска с индикаторным растром; на фиг.4 - светочувствительный приемник; на фиг.5 - пример индикаторной маски, соответствующий коду преобразования перемещения.
Датчик содержит корпус 1, в котором установлены светочувствительный приемник 2, обьектив 3 и маска 4 с эталонным растром, а также крышка 5 корпуса 1, в которой смонтирована маска 6 с индикаторным растром и неподвижно установлен осветитель 7. При эксплуатации маска 6 соединяется с исследуемым объектом (на чертеже связь не показана).
Маски 4 и 6 изготовлены из оргстекла с нанесенными на них фотоспособом соответственно эталонным 8 и индикаторным 9 растрами и реперной точкой 10 на маске индикаторного растра. Реперная точка 10 расположена на левом краю сектора индикаторной маски 9, содержащего элементы, соответствующие коду, считываемому при нулевом перемещении (начальному положению). В приведенном примере на фиг.З в
00
го XI XI
XI
этом секторе элементов растра нет, т.к. начальному положению соответствует код 0.
Исходное положение маски 6, соответствующее нулевому перемещению, таково, что реперная точка 10 совмещена с правым краем одного из секторов 8 неподвижной маски 4. Совмещение производится путем поворота вала с маской 6 при визуальном наблюдении через окно в крышке корпуса 5, которое не показано на чертежах.
Предлагаемый датчик работает следующим образом.
Осветитель 7 освещает маски 4 и 6 с эталонным и индикаторным растрами, на светочувствительный приемник 2 через объектив 3 проецируется изображение нониус- ного сопряжения растров масок 6 и 4. При перемещении исследуемого объекта будет соответственно меняться положение нони- усного сопряжения, которое будет соответствовать кодовому значению величины смещения индикаторного растра относительно реперной точки 10.
В исходном положении, при отсутствии перемещения, реперная точка 10 подвижной маски 6 совмещена с правым краем сектора а неподвижной маски 4. При угловом перемещении объекта против часовой стрелки на выходе датчика будет 0 до тех пор, пока левый край элемента индикаторного растра, соответствующего коду числа 1, не совместится с правым краем сектора б, что соответствует углу 5,63 град (цена деления). Начиная с этого момента, будет осуществляться совмещение этого элемента индикаторного растра с сектором б, и на выходе датчика будет 1. При достижении угла 11,26 град, сектор б окончательно пропустит этот элемент, и начнется совмещение сектора в с элементом, соответствующим коду числа 2 и т.д.
При перемещении в обратном направлении (по часовой стрелке) угол поворота будет кодироваться обратным кодом. О том, какой код считывать - прямой или обратный - можно судить по форме импульсов, которые асимметричны относительно направления перемещения благодаря асимметри1 элементов индикаторного растра.
Поскольку растр индикаторной маски 6 выполнен в соответствии с параллельны
двоичным кодом абсолютной величины пе ремещения, значение кода представляет со бой величину абсолютного перемещениу исследуемого объекта. Индикаторная маскг 6 может быть выполнена по любому другому
коду, что не изменит принципа действия датчика. На фиг.5 приведен пример индикаторной маски, соответствующей коду преобразования у 4arccos(x/8).
Изменение сигнала в пределах двух элементов растров может быть использовано для повышения точности измерения и определения направления перемещения.
Получение информации на выходе датчика в виде двоичного кода позволяет упростить схемы цифрового регулирования и повысить их точность и надежность.
Формула изобретения
1.Датчик перемещения, содержащий излучатель, оптически связанный через последовательно размещенные подвижную кодовую маску с разрядными дорожками из чередующихся активных и пассивных участков, и неподвижную щелевую диафрагму с
фотоприемниками, отличающийся тем, что, с целью повышения технологичности и расширения функциональных возможностей датчика, в нем щели щелевой диафрагмы расположены с постоянным шагом,
активные участки разрядных дорожек расположены с возможностью образования но- ниусного сопряжения со щелями щелевой диафрагмы и выполнены в виде треугольников, одноименные катеты которых перпендикулярны направлению перемещения, а фотоприемники выполнены кольцевыми, их число соответствует разрядности датчика.
2.Датчик-no п.1,отличающийся тем, что кодовая маска снабжена реперной
меткой, расположенной на перпендикулярном направлению перемещения катете одного из активных участков разрядной дорожки.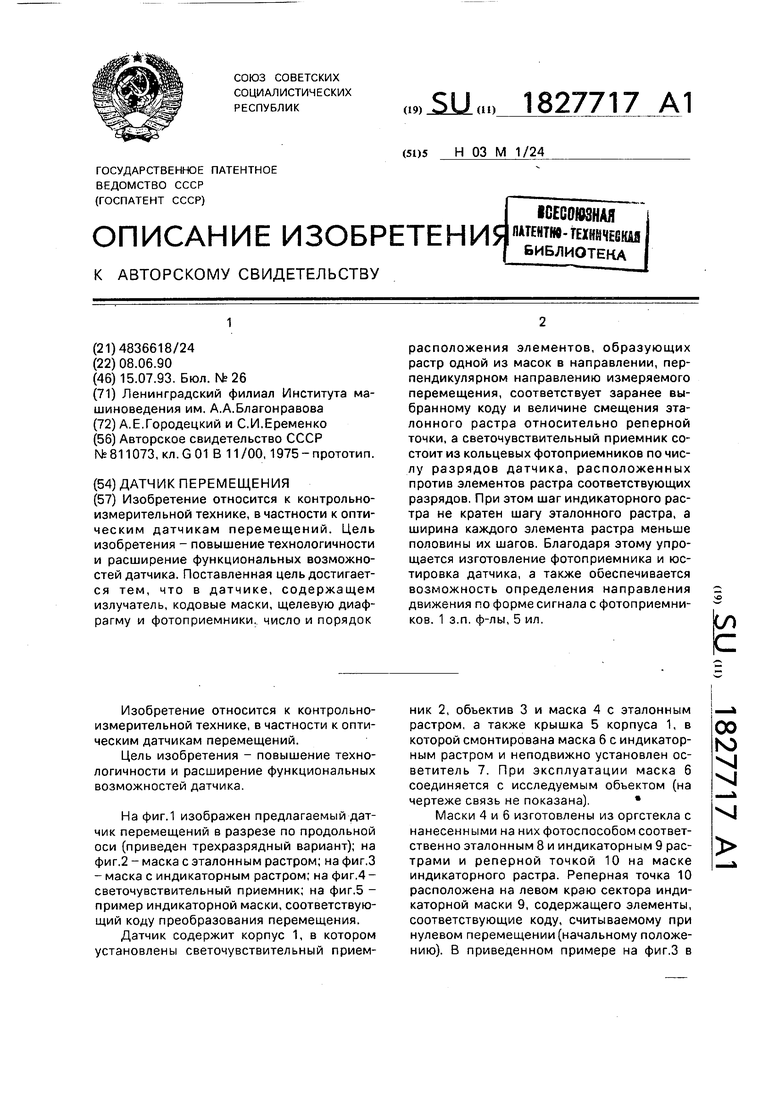
| название | год | авторы | номер документа |
|---|---|---|---|
| Муаровый датчик перемещений | 1979 |
|
SU811073A1 |
| СПОСОБ ЗАЩИТЫ ГОЛОГРАММ ОТ ПОДДЕЛКИ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПОДЛИННОСТИ ГОЛОГРАММЫ | 2003 |
|
RU2246743C2 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU849266A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЕ-КОД | 2003 |
|
RU2248093C1 |
| Фотоэлектрический преобразователь угла поворота вала в код | 1982 |
|
SU1103273A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822117A1 |
| Фотоэлектрическая растровая система | 1969 |
|
SU340330A1 |
| РАСТРОВО-КОДОВЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2027206C1 |
| Фотоэлектрический преобразователь положения в код | 1981 |
|
SU1040503A1 |
| Устройство считывания фотоэлектрического растрового преобразователя | 1981 |
|
SU966721A1 |
Изобретение относится к контрольно- измерительной технике, в частности к оптическим датчикам перемещений. Цель изобретения - повышение технологичности и расширение функциональных возможностей датчика. Поставленная цель достигается тем, что в датчике, содержащем излучатель, кодовые маски, щелевую диафрагму и фотоприемники, число и порядок расположения элементов, образующих растр одной из масок в направлении, перпендикулярном направлению измеряемого перемещения, соответствует заранее выбранному коду и величине смещения эталонного растра относительно реперной точки, а светочувствительный приемник состоит из кольцевых фотоприемников по числу разрядов датчика, расположенных против элементов растра соответствующих разрядов. При этом шаг индикаторного растра не кратен шагу эталонного растра, а ширина каждого элемента растра меньше половины их шагов. Благодаря этому упрощается изготовление фотоприемника и юстировка датчика, а также обеспечивается возможность определения направления движения по форме сигнала с фотоприемников. 1 з.п. ф-лы, 5 ил.
(puai
З -ti .
Фиг. 2
Фиг. З
Фиг. 4
Фиг. 5
| Муаровый датчик перемещений | 1979 |
|
SU811073A1 |
