Изобретение используется в машиностроении, в частности в механизированных и автоматизированных сборочных комплексах, линиях и участках, а также в робототехнике, станкостроении, транспорте, контрольно-сортирующих устройствах в качестве датчика размера или положения подвижного звена в механизме и т.д.
Целью изобретения является упрощение конструкции, расширение функциональных возможностей и устранение указанных недостатков.
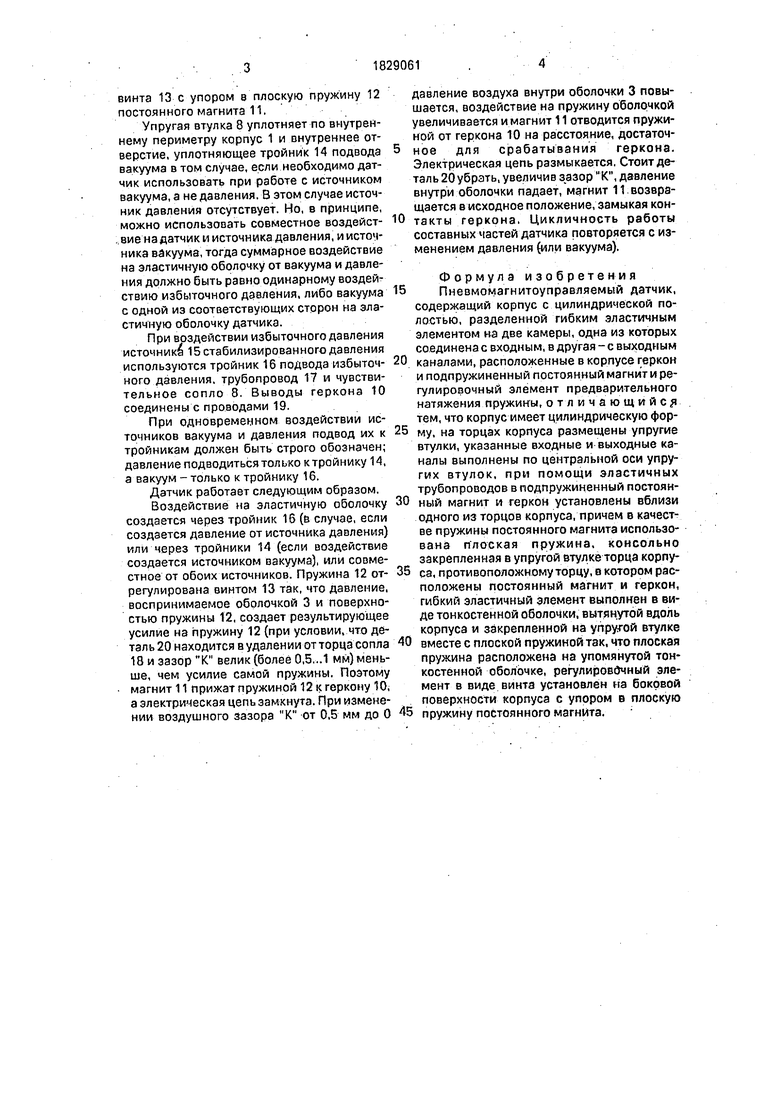
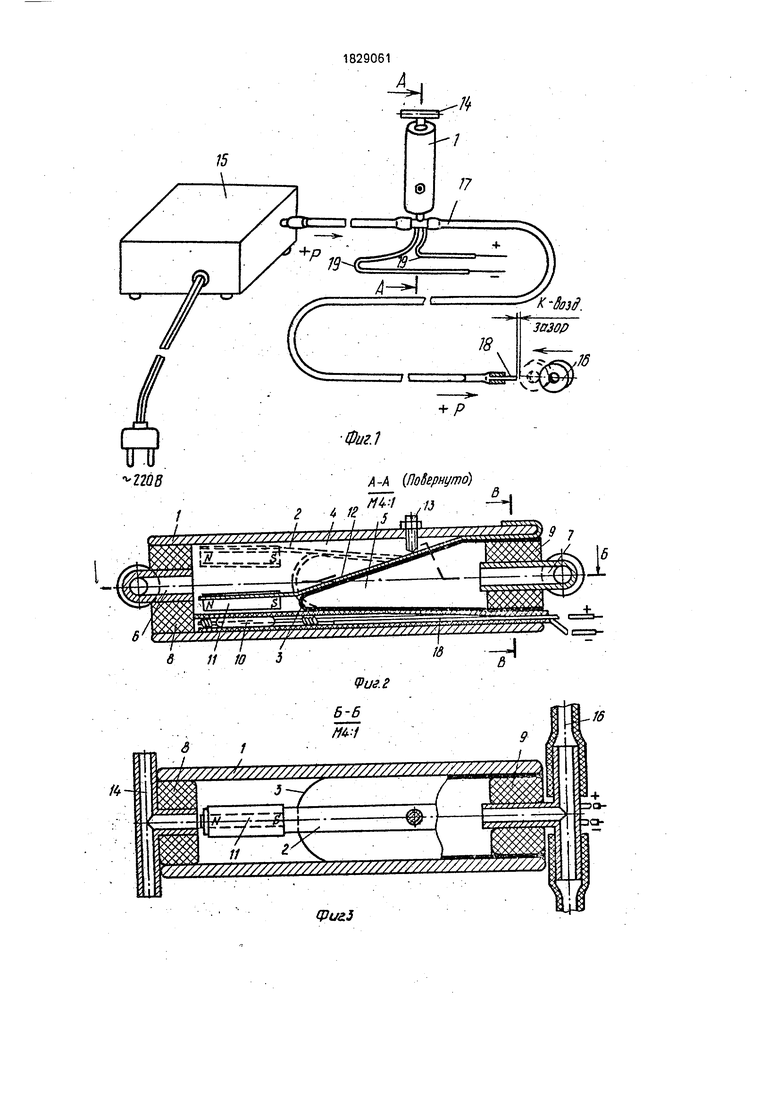
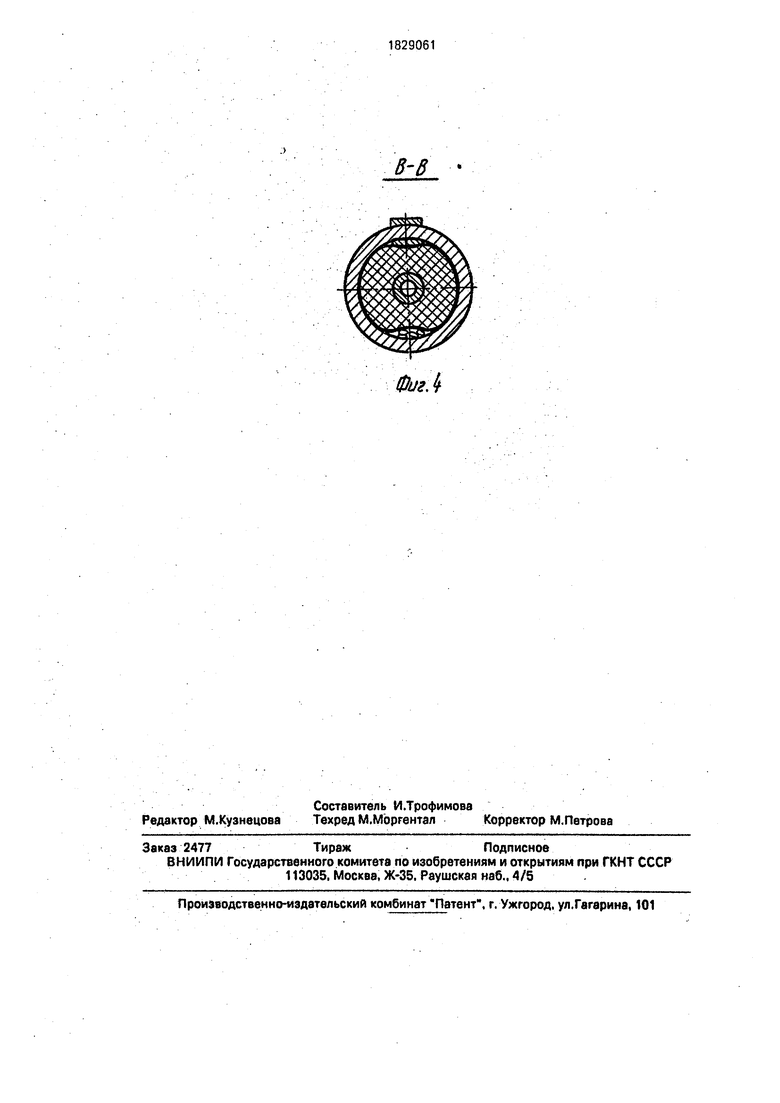
. На фиг. 1 представлен общий вид датчика с источником стабилизированного давления, связывающими трубопроводами и Соплом; на фиг.2 - продольный разрез непосредственно преобразователя давления датчика во взаимодействии с чувствительными элементами; на фиг.З - продольный разрез преобразователя давления в горизонтальной плоскости; на фиг.4 изображен разрез края датчика по второй уплотняющей упругой втулке, второму (неподвижному) краю упругой консольной пружины, тройнику подвода давления и трубопровода чувствительному соплу датчика.
Пневмомагнитоуправллемый датчик состоит из корпуса 1 с цилиндрической поло- , стью 2, разделенный гибким эластичным элементом 3 на две камеры 4 и 5, Камера 4 соединена с входным каналом 6, а камера 5 - выходным каналом 7, Корпус 1 имеет цилиндрическую форму, на торцах корпуса 1 размещены упругие втулки 8 и 9, входные каналы 6 и 7 выполнены по центральной оси упругих втулок 8 и 9 при помощи эластичных трубопроводов, Внутри корпуса 1 расположены геркон 10 и подпружиненный постоянный магнит 11. В качестве пружины использована плоская пружина 12, закрепленная кон.сольно в упругой втулке 9 торца корпуса 1. Постоянный магнит 11 и геркон 10 установлены вблизи торца корпуса 1 с втулкой 8.
Гибкий эластичный элемент 3 выполнен в виде тонкостенной оболочки, вытянутой вдоль корпуса 1 и закрепленной на упругой втулке 9 таким образом, что плоская пружина 12 расположена на тонкостенной оболочке 3. На боковой поверхности корпуса 1 установлен регулировочный элемент в виде
оо
ю ю о
Os
винта 13 с упором е плоскую пружину 12 постоянного магнита 11.
Упругая втулка 8 уплотняет по внутреннему периметру корпус 1 и внутреннее отверстие, уплотняющее тройник 14 подвода вакуума в том случае, если необходимо датчик использовать при работе с источником вакуума, а не давления. В этом случае источник давления отсутствует. Но, в принципе, можно использовать совместное воздейст- .вие на датчик и источника давления, и источника вакуума, тогда суммарное воздействие на эластичную оболочку от вакуума и давления должно быть равно одинарному воздействию избыточного давления, либо вакуума с одной из соответствующих сторон на эластичную оболочку датчика.
При воздействии избыточного давления источника 15 стабилизированного давления используются тройник 16 подвода избыточного давления, трубопровод 17 и чувствительное сопло 8. Выводы геркона 10 соединены с проводами 19.
При одновременном воздействии источников вакуума и давления подвод их к тройникам должен быть строго обозначен; давление подводиться только к тройнику 14, а вакуум - только к тройнику 16.
Датчик работает следующим образом.
Воздействие на эластичную оболочку создается через тройник 16 (в случае, если создается давление от источника давления) или через тройники 14 (если воздействие создается источником вакуума), или совместное от обоих источников. Пружина 12 отрегулирована винтом 13 так, что давление, воспринимаемое оболочкой 3 и поверхностью пружины 12, создает результирующее усилие на пружину 12 (при условии, что деталь 20 находится в удалении от торца сопла 18 и зазор К велик (более 0,5,,.1 мм) меньше, чем усилие самой пружины. Поэтому магнит 11 прижат пружиной 12 к горкому 10, а электрическая цепь замкнута. При изменении воздушного зазора К от 0,5 мм до О
давление воздуха внутри оболочки 3 повышается, воздействие на пружину оболочкой увеличивается и магнит 11 отводится пружиной от геркона 10 на расстояние, достаточное для срабатывания геркона. Электрическая цепь размыкается. Стоит деталь 20 убрать, увеличив зазор К, давление внутри оболочки падает, магнит 11 возвращается в исходное положение, замыкая контакты геркона, Цикличность работы составных частей датчика повторяется с изменением давления (или вакуума).
Формула изобретения
Пневмомагнитоуправляемый датчик, содержащий корпус с цилиндрической полостью, разделенной гибким эластичным элементом на две камеры, одна из которых соединена с входным, в другая - с выходным
каналами, расположенные в корпусе геркон и подпружиненный постоянный магнит и регулировочный элемент предварительного натяжения пружины, о т л и ч а ю щ и и с я тем, что корпус имеет цилиндрическую форМу, на торцах корпуса размещены упругие втулки, указанные входные и выходные каналы выполнены по центральной оси упругих втулок, при помощи эластичных трубопроводов в подпружиненный постоянный магнит и геркон установлены вблизи одного из торцов корпуса, причем в качестве пружины постоянного магнита использована плоская пружина, консольно закрепленная в упругой втулке торца корпуса, противоположному торцу, в котором расположены постоянный магнит и геркон, гибкий эластичный элемент выполнен в виде тонкостенной оболочки, вытянутой вдоль корпуса и закрепленной на упругой втулке
вместе с плоской пружиной так, что плоская пружина расположена на упомянутой тонкостенной оболочке, регулировочный элемент в виде винта установлен на боковой поверхности корпуса с упором в плоскую
пружину постоянного магнита, ;
| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор потока жидкости | 2022 |
|
RU2785089C1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| КЛАПАН ДОЗИРОВАННОЙ ПОДАЧИ РАБОЧЕЙ СРЕДЫ | 2006 |
|
RU2320912C2 |
| КЛАПАН ПЕРЕПУСКНОЙ ДИСКРЕТНОГО ДЕЙСТВИЯ С МАГНИТНОЙ ФИКСАЦЕЙ, РАЗГРУЗКОЙ И КОНТРОЛЕМ ПОЛОЖЕНИЯ | 2012 |
|
RU2516057C2 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| НАСОС С ТЕПЛОВЫМ ПРИВОДОМ | 1991 |
|
RU2027958C1 |
| Коммутационное устройство для датчика положения с гибким приводом | 1980 |
|
SU943900A1 |
| КЛАПАН ПЕРЕПУСКНОЙ ДИСКРЕТНОГО ДЕЙСТВИЯ С МАГНИТНОЙ ФИКСАЦИЕЙ, РАЗГРУЗКОЙ И КОНТРОЛЕМ ПОЛОЖЕНИЯ | 2009 |
|
RU2424461C1 |
| РЕЛЕ РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2141632C1 |
| НАСОС-АВТОМАТ | 2021 |
|
RU2786289C1 |
Использование: в автоматизированных устройствах, РТК, линиях и участках, особенно в сборочных, мехзнообрабать ваю- щих, контрольно-сортирующих. Сущность изобретения: корпус выполнен в виде пустотелой трубы, а чувствительным элементом служит эластичная оболочка, вытянутая вдоль корпуса, закрепленная на упругой втулке и взаимодействующая с плоской пружиной, на подвижном краю которой расположен постоянный магнит, взаимодействующий с контактами геркона. 4 ил.
ФигЛ
| Реле давления | 1979 |
|
SU817781A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик расхода | 1981 |
|
SU1002839A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
